Пьявченко Т.А., Финаев В.И. Автоматизированные информационно-управляющие системы
Подождите немного. Документ загружается.


241
Рис. 88
Определение аргументов показано на рис. 89.
Рис. 89
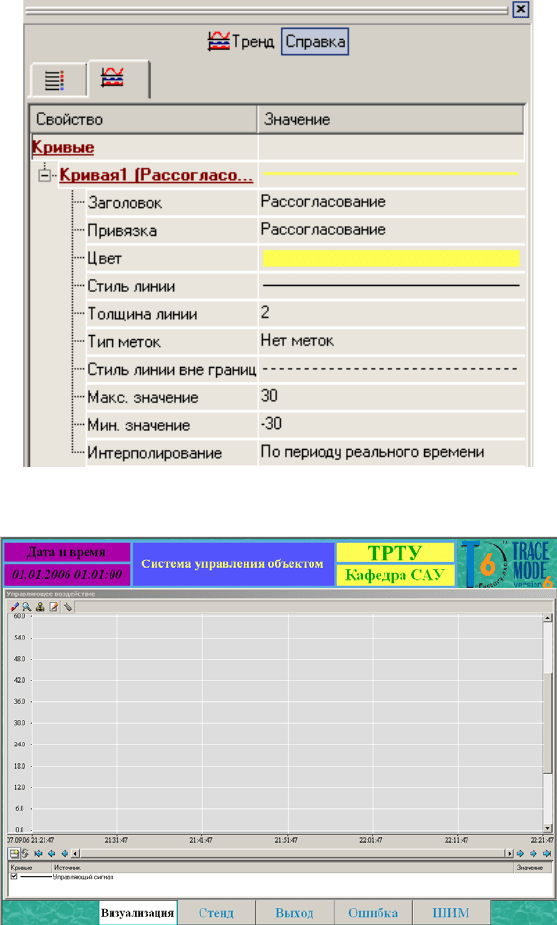
Настройки тренда показана на рис 90.
Экран управление отображает в режиме реального времени
значение управляющего воздействия, как это показано на рис. 91.
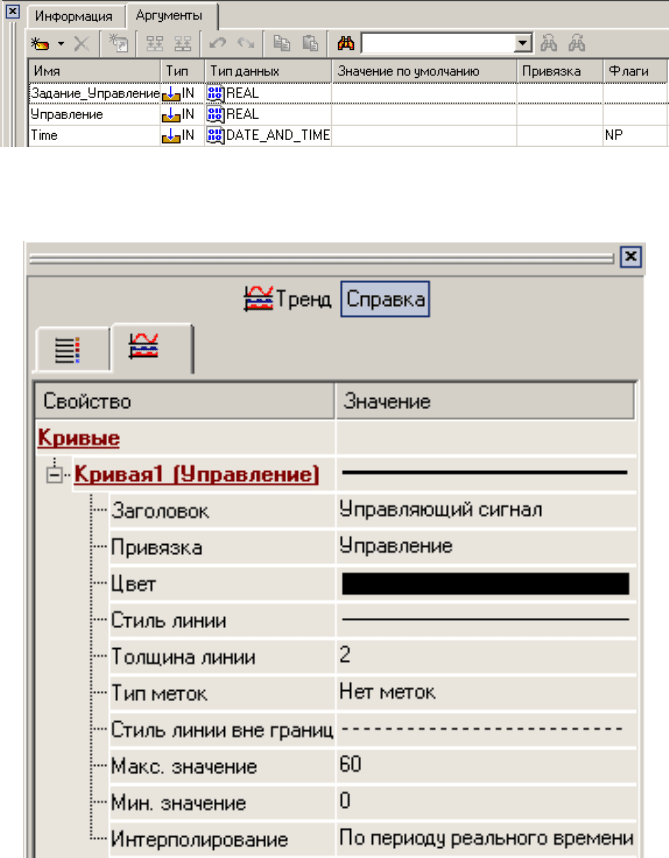
Определение аргументов для данного случая показано на рис. 92.
Настройки тренда показана на рис. 93.
242
Рис. 90
Рис. 91
243
Рис. 92
Рис. 93
244
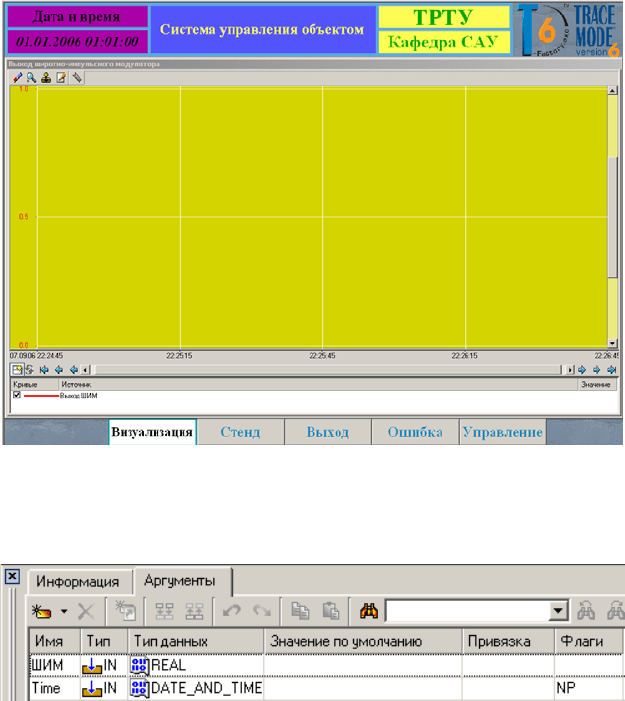
Экран ШИМ отображает в режиме реального работу широтно-
импульсного модулятора, как это показано на рис.94.
Рис. 94
Определение аргументов показано на рис. 95.
Рис. 95
Настройки тренда показана на рис. 96.
В шаблонах программ создадим два FBD (Functional Blocks
Diagram)-программы, как это показано на рис. 97.

245
Рис. 96
Рис. 97

246
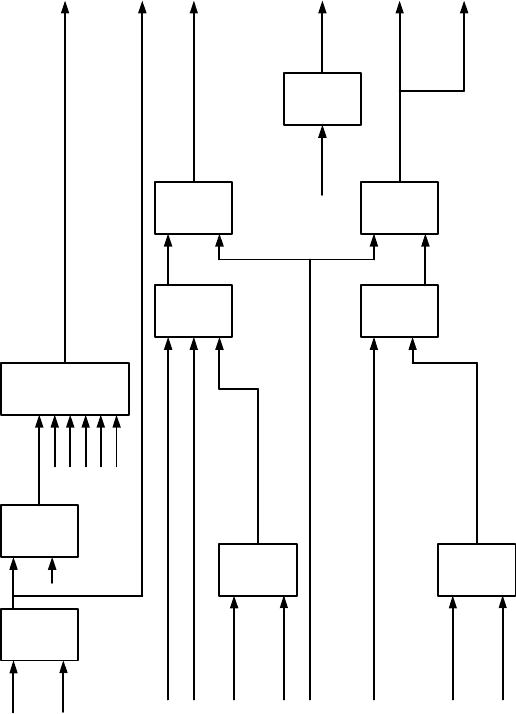
6.2.2. Создание шаблонов программ. Программа Регулирование
реализует алгоритмы ПИ-регулятора, имитирует работу релейного
регулятора, осуществляет переключение между ними, обеспечивает
динамическое отображение бегущих дорожек и разрешает запись
значений в теги. Поскольку FBD-программа достаточна объёмна,
приведём её схематичное изображение, вид которого показан на
рис. 98.
Опишем назначение функциональных блоков:
- X-Y - арифметическое вычитание для
вычисления величины
рассогласования;
- DZONE - зона нечувствительности, которая вводится для
устранения высокочастотных помех;
- PID - блок, вырабатывающий управляющее воздействие по ПИД-
закону, причем, поскольку в данном проекте реализован ПИ-закон
управления, аргумент для KD входа не создаётся;
- SSWT - блок безударного переключения предназначен для
переключения способа регулирования (Mode), а также для разрешения
записи в
теги (Start);
- </> - блоки сравнения, которые имитируют работу релейного
регулятора;
- PILA - генератор пилообразных импульсов, который
вырабатывает пилообразный импульс в диапазоне значений от 0 до 1, и
предназначен для динамического изображения бегущей дорожки.
Блок PID является непосредственно звеном, выдающим
управляющее воздействие. Этот блок формирует выходное значение
по ПИД-закону от величины, поданной на вход
INP:
∑
i
ii-1
ii i k
k=1
KD×(INP - INP )
u=Q=KP×INP+ +KIΔtINP
Δt
,
где i
– текущий такт пересчета, КР, KD и KI – соответственно
коэффициенты при пропорциональной, дифференциальной и
интегральной составляющих, Δt - период пересчета блока в секундах
(длительность такта).
Для ограничения величины управляющего воздействия
используются входы блока MIN и MAX. Если величина управления u
i
меньше MIN, то Q=MIN, если величина управления больше MAX, то
Q=MAX, при этом в обоих случаях накопление интегральной
составляющей закона регулирования прекращается.
247
X-Y
DZONE
PID
SSWT SSWT
SSWT SSWT
PILA
>
<
Zdn
Input
Dlt
INP
INP
KP
KD
KI
MAX
MIN
Upravlenie
Rassoglasovanie
Mode
In select
SEL
IN0
IN1
Mode SEL
IN1
IN1
Start
SEL
SEL
Zdn
Input
Zdn
Input
PWM
Vent1
Vent2
IN1
1
Doroga
Рис. 98
Введение в алгоритм параметра Δt исключает необходимость
пересчета настроек регулятора при смене периода пересчета.
Выходная величина с этого блока Q
i
поступает на звено ШИМ
PWM, Сигнал с выхода которого поступает на исполнительный блок
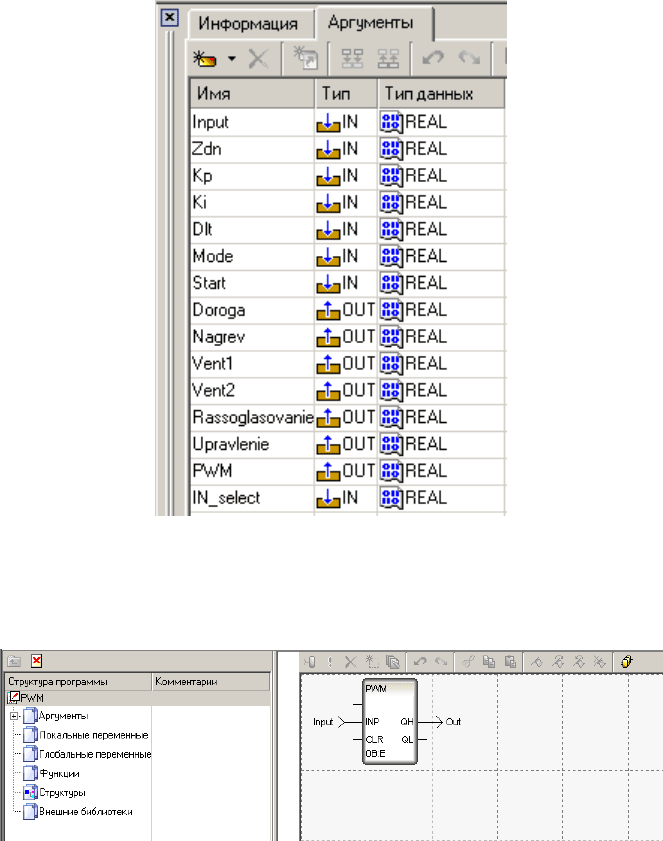
через модуль ввода-вывода NL-4RTD. Аргументы для этого шаблона
FBD-программы будут такими, как показано на рис. 99.
248
Рис. 99
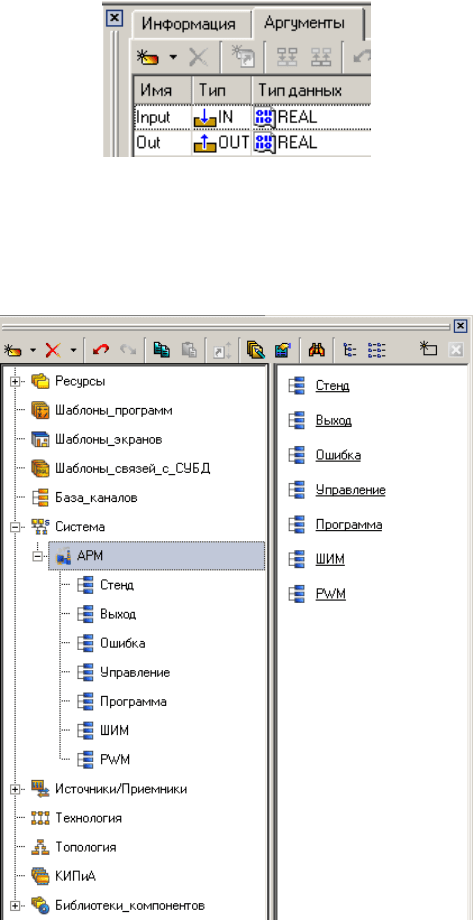
Шаблон программы PWM выглядит так, как это показано на
рис. 100.
Рис. 100
Аргументы программы показаны на рис. 101. Эта программа
имитирует работу широтно-импульсного модулятора.
249
Рис. 101
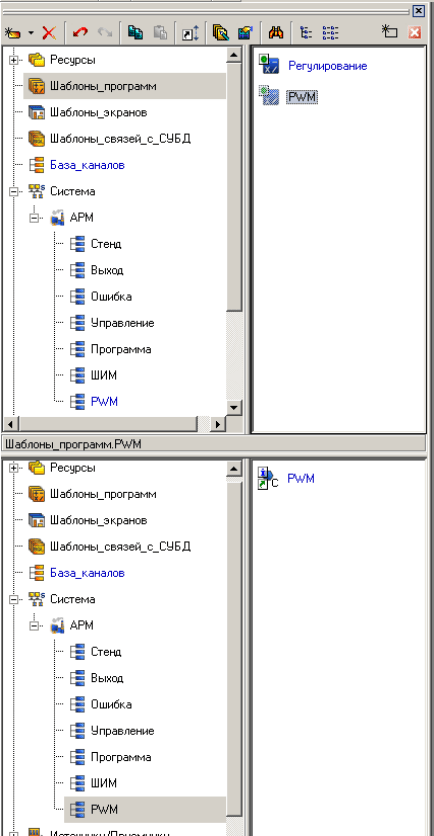
6. 2.3. Автопостроение каналов. После проведения работ,
определенных выше, создадим в системе узел АРМ и в нём 7 объектов,
как это показано на рис. 102.
Рис. 102
250
Откроем дополнительное окно навигатора (см. рис. 103) и из
шаблонов экранов и программ перетащим мышкой созданные
шаблоны в соответствии с именами объектов:
Рис. 103