Roy K.K. Potential theory in applied geophysics
Подождите немного. Документ загружается.

17.15 Global Optimization 609
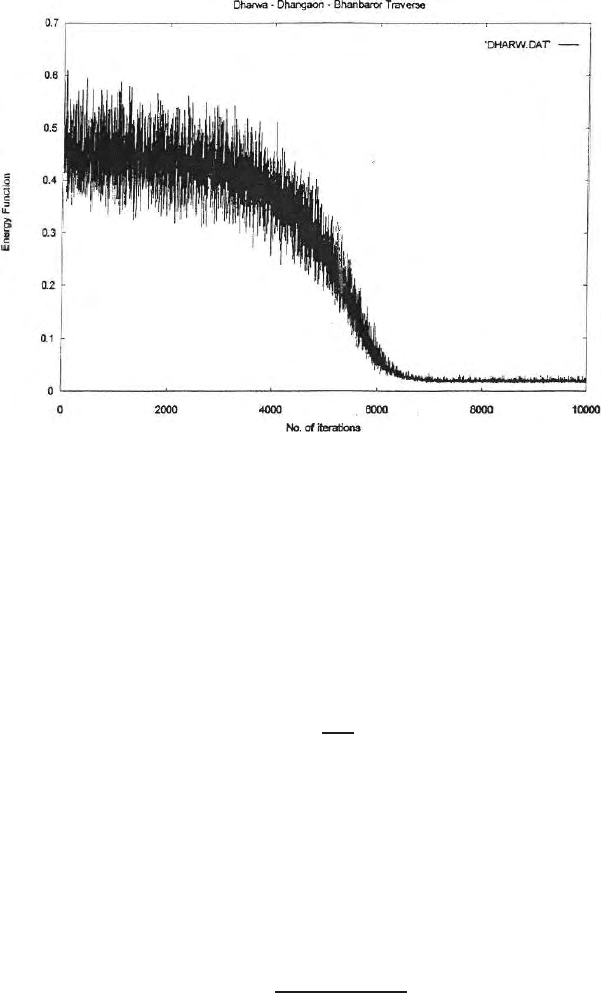
Fig. 17.13. Nature of conv ergence in VFSA inversion
10,000 iterations are needed for convergence. Because of random jump, the
probability, of a solution, getting trapped in a local minimum pocket, is zero.
Once a forward problem is solved, inverse problem is so lved auto matically. In
global search, there is no mathematics in an inverse problem so stability is
guaranteed. However computation time required to handle 10,000 iterations
remains as a problem. Geman and Geman (1984) showed that a necessary and
sufficient condition for convergence to the global minimum level for Simulated
Annealing is given by the following cooling schedule
T(K)=
T
0
ln k
(17.198)
where T (K) is the temperature at iteration K.
Fast Simulated Annealing (FSA)
Szu and Hartley (1987) proposed a new algorithm known as Fast Simulated
Annealing. This algorithm uses Cauchy like distribution which shows very
sharp peak at lower temperature (Sen and Stoffa 1995). This Cauchy like
distribution is a function of temperature and is given by
f(∆m
i
) α
T
(∆m
2
i
+T
2
)
1/2
(17.199)
where T is the temperature or the controlling parameter to be lowered as per
any specific cooling schedule. ∆m
i
is the perturbation in the ith parameter

610 17 Inversion of Potential Field Data
model with respect to the present model. Szu and Hartely showed that for
choice of the perturbed model generation program, the cooling schedule for
convergence is chosen a s
T(K)=
T
0
K
(17.200)
where K is the number of iteration. The nature of Cauchy type distribution is
very much different from the Gaussian type distribution. At lower tempera-
ture, Cauchy type peaks can be used to find out the highest probability values
with greater sensitivity.
Very Fast Simulated Annealing (VFSA)
Ingber (1989, 1993) did several modifications of Simulated Annealing and
proposed a new algorithm known as Very Fast Simulated Annealing (VFSA)
Ingber proposed a new probability distribution for model generation such
that a slow cooling schedule is no longer required. The special features of this
algorithm are (i) each parameter can have different types of discretization
and different degree of perturbation (ii) the temperature or the controlling
parameter may be different for different parameters (iii) new probability dis-
tribution avoids Cauchy type distribution but avoids slow cooling and quick
convergence of an inverse problem. Thus it became a very effective tool to
handle geophysical inverse problems and is used by many geophysicists to
solve 2D/3D inverse problems. A brief sketch of the Ingb er’s (1993) VFSA
model is
m
k+1
i
=m
k
+y
i
m
max
i
− m
min
i
(17.201)
where m
k
i
is the ith model parameters after the iteration K and this value is
within the upper and lower bounds i.e., m
min
i
≤ m
k
i
≤ m
max
i
.m
k+1
i
is the model
parameter after (K + 1) iteration and it is also within the upper and lower
bounds i.e. m
k+1
i
is also within m
min
i
≤ m
k+1
i
≤ m
max
i
. Th e special parameter
Y
i
is defined by (Ingber 1993) as
g
T
(y) =
NM
2
i=1
1
2(|Y
i
| +T
i
)ln
1+
1
T
i
=
NM
2
i=1
g
T
i
(y
i
) . (17.202)
Equation (17.202) has the following cumulative probability as
G
T
i
(y
i
)=
1
2
+
Sgn (y
i
)ln
1+
|Y
i
|
T
i
ln
1+
1
T
i
. (17.203)
Thus a random number u
i
drawn from an uniform distribution U (0, 1) can
be mapped into the above distribution with the following formulae

17.15 Global Optimization 611
Y
i
=Sgn
u
i
−
1
2
T
i
)
1+
1
T
i
|2u
i
−1|
− 1
*
. (17.204)
Distribution of global minimum can be statistically obtained using the cooling
schedule
T
i
(k) = T
0
i
exp
−C
i
K
1/NM
. (17.205)
T
i
is the controlling parameter for the ith model parameter and T
0
i
the initial
controlling parameter in the model. The value of u
i
randomly varies within
+1 to −1. Sgn denotes the sign of the expression. So model perturbation has
some relation with the probability distribution of the respective parameters.
Generally Metropolis criterion is used here also for selection of the models
automatically. In global search, there is no mathematics in an inverse prob-
lem so stability is guaranteed. However computation time required to handle
10,000 iterations may be more as mentioned. Geman and Geman (1984) has
shown the conditions for convergence of the model. The temperature is used
to decide on the acceptance criterion. VFSA also has the flexibility of chang-
ing the cooling schedule. Figure (17.13) shows the nature of convergence in
VFSA applied to two dimensional DC resistivity problem. Convergence in an
inverse problem starts after several thousand iterations are over.
17.15.4 Genetic Algorithm
Introduction
Genetic Algorithm is one of the powerful tools for global optimization. It is
also based on the principle of random walk in the parameter space. GA has
artificial intelligence like SA and can handle strongly nonlinear pr oblems. GA
was discovered by Holland (1977) and was brought to the present stage of
development by Goldberg (1989) and Davis (1991). The procedure for genetic
algorithm has some similarity with the biological evolution and surviva l for
the fittest. Like Monte Carlo inversion, and Simulated Annealing, GA does
not need any derivatives or curvature information. Therefore once the forward
problem is solved, inverse problem can be solved automatically because the
entire exercise is to choose some models, compute synthetic data, compare d
Pre
with d
Obs
, compute the cost function or error function and go on choosing
the better and better models through certain guide lines in deciding on the
acceptance criterion.
Unlike other approaches, GA works with a population of models. Larger
the number models to start with more efficient will be the global search in
the parameter space. The basic guidelines for genetic algorithms are divided
into the following nine steps viz.,
(i) Selection of the even number (N) models from a large set of models.
(ii) Randomly generate N/2 number of pairs.

612 17 Inversion of Potential Field Data
(iii) Discretize the of model parameters in one, two or three dimensional
domain. In that process a continuous domain gets discretized.
(iv) Discretize each model par ameter fixing the upper and lower bounds and
ρ
i
be the number of models parameters for the parameter m
i
.Herem
i
is the i th model parameter and ρ
i
is the number of discretized values
between the upper and lower bounds. Larger the value of ρ
i
finer will be
model resolution. ρ
i
may be same or different for different parameters
of the model.
(v) Binary coding is done for each model parameter from upp er and lower
bounds in O’S and 1’S and bit strings or chromosomes in GA language
are g enerated.
(vi) Generation of Concatenated strings.
(vii) Generation of randomly chosen pairs and crossovers with reasonably
high crossover probability are the next steps.
(viii) Mutation with reasonably low mutation probability is done next to
retain certain diversity in the models or to remove any bias.
(ix) Model updating or survival for the fittest test is done next. This is
the last step where the best models are chosen from the p opulation.
The entire genetic operation is completed at this stage and only first
iteration of the Genetic algorithm is over at this stage. With the updated
models the second iteration starts. The entire operation continues till
the complete convergence is obtained upto a specified limit.
Selection
Since GA starts with a population of models instead of a single model, an arbi-
trarily 200 or 300 models are randomly generated using the random number
generator and the energy function or cost function or error function
E (m)=
1
NS
'
d
Obs
− d
Pr e
(
t
'
d
Obs
− d
Pr e
(
(17.206)
is computed where d
Obs
and d
pre
as defined earlier are observed and predicted
field data. t is the transpose and NS is the number of data points. Gibbs
probability distribution
P (m
ij
)=
exp (−Em
ij
) /T
m
4
j=1
exp (−Em
ij
) /T
(17.207)
is computed. T the temperature or the controlling par ameter is also used
these days for model search the way it is used in simulated annealing. In case
we decide to work with 50 initial models, we select 50 mod els with relatively
higher probabilities from the arbitrary population of 300 models. For one
dimensional problems, 10 to 20 models are good enough to start with the
Genetic process. For two dimensional problem, initial population of 50 to 100

17.15 Global Optimization 613
should be appropriate. For three dimensional problem 100 to 1000 models
should be chosen to start with. One should remember that larger the number
of initial, models, higher will be the computation time and more efficient will
be the genetic algorithm process.
Discretization
Double discretization of the model space is done in two stages. In the first
stage, the discrete set of model parameters are assumed for an earth model,
where the physical property might be varying continuously. The seco n d set
of discreti zation comes from fixing the upper and lower bounds for the model
parameters i.e.
where
m
i
=m
min
i
+J∆ m
i
(17.208)
where J varies from 0 to N
i
and
∆m
i
=
m
max
i
− m
min
i
N
i
. (17.209)
So for a finite number of models N having M parameters the number of model
will be
N=
M
2
i=1
N
i
. (17.210)
Parameter Coding
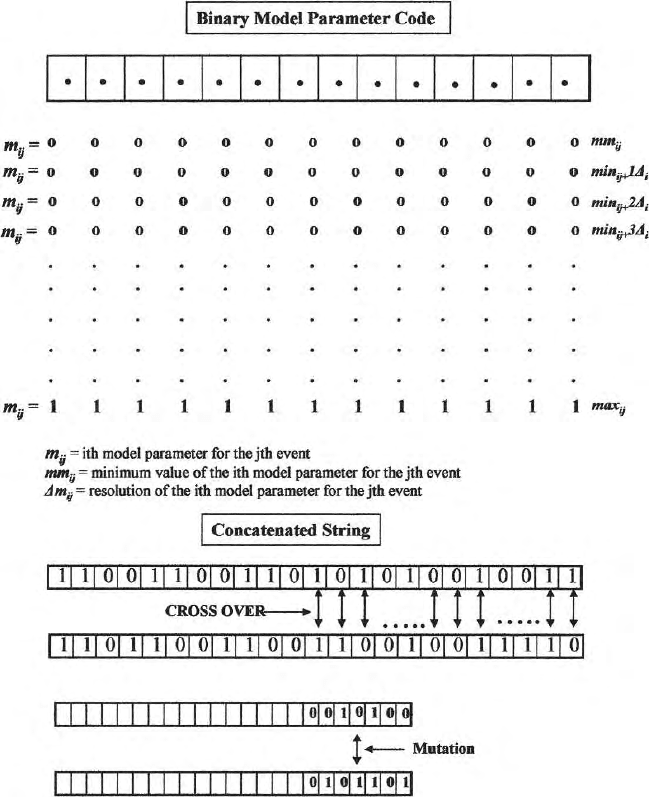
Q number of models are binary coded with 0’s and 1’s. Binary coding is
done to represent a model par ameter, such that all the bits become zero
at the minimum value of the parameter and all the bits become one at the
maximum value as shown in the Fig. (17.14). Depending upon the level of
resolution needed and the discretization done, a parameter can be a 3, 4,
5 ...... 9 bit string for one dimensional problem. for two /three dimensional
problem, the parameter can b e of 15 to 20 bit string or even more. These ‘bits’
are called ‘genes’ which can take a value of ‘0’ or ‘1’ called alleles. For a 7 bit
string 2
7
-1 discrete values of the model parameters will be obtained. For two
dimensional problems 15 bit strings have been used with success. These 7 bit,
9 bit or 15 bit strings are called chromosomes. One chromosome is generated
for one parameter. They are attached one after the other to obtain binary
co ded concatenated strings. Larger the number of bits in a chromosome, longer
will be the concatenated st ring, higher will be the c omputation time. For
Two/three dimensional problems in finite difference or finite element forward
problem, the concatenated strings will be very long because each element or
a group of elements will form one parameter.
614 17 Inversion of Potential Field Data
Fig. 17.14. Genetic Algorithm structure: (a) Parameter coding and preparation of
concatenated string (b) selection of pairs(c) crossover (d)mutation
Crossover
These binary co ded strings (Fig. 17.14) are randomly paired to generate Q/2
pairs of models. At this stage the crossover starts at randomly chosen crossover
point with high crossover probability. Crossover can be a single point or a
multipoint crossover. The exchange of bits or ‘genes’ take place to all the bits
on the right of the crossover point (Fig. 17.14). The bits, left to the crossover
point, remain unaltered. For multipoint crossover also, the crossover, is done

17.15 Global Optimization 615
with randomly selected crossover points for each chromosome and for each
parameter. But the crossover or floor crossing of the bits take place only to
the bits right of the crossover points. For two a nd three dimensional problems
multipoint crossover is advisable. For one dimensional problems single point
crossover works well. Genetic Algorithm is a very active area of research.
Therefore these procedures are also changing.
Mutation
After crossover is over, just to give little diversity and to remove any kind of
bias, mutation is done with low mutation probability. Here floor crossing of
one or two bits is done and allowed the system to converge. (Fig. 17.14). High
mutation probability will delay the convergence and may lead to Monte Carlo
type inversion. Mutation probability is always kept low.
Model update
This is the last genetic operation. This operation is also termed as the survival
for the fittest test. Three or four different approaches are available in the
literature regarding the model update. In this chapter Stochastic Remainder
Selection Without Replacement (SRSWR) as prop osed by Goldberg (1989)
and as it is used by the author for inversion of one or two dimensional problem
is discussed .
Once
Q
2
pairs of offspring models are generated from
Q
2
pairs of parents.
Each of these modes had to pass through the survival for the fittest test. The
stronger models will survive and strengthen their position. The weaker models
are eliminated from the contest.
Each model has its own objective function or error function. The proba-
bilities of these new generation of populations are multiplied by the number
models present. So me of these fractional probabilities have integer numbers.
It can be 1 or 2 or 3. Some of the members do not have integer number. In
the selection for next generation of new models, all the models having integer
number will go first. If the model no.1 has the multiplied probability 2.5 (say),
then the model no.1 will go twice. If it is 3.4 , then it will go thrice. Once all
the models having multiplied probability greater than 1 are taken care of,
the fractional part of the multiplied probabilities are tak en. Higher fractional
parts are given preference to get a berth in the next generation mo dels with
which the next generation genetic process will start. If a particular model
had multiplied probability 2.8 (say), then if gets two berths for two integer
numbers and one berth for higher fractional number. So this model gets three
berths to start the next genetic process. These are offspring models. Parents
models are destroyed after the crossover is completed.
If we start with 50 initial models, there will be 50 berths in the model
update. Who will occupy these berths and how. The berths are given to the
models with higher multiplied probabilities. The stronger models may occupy
616 17 Inversion of Potential Field Data
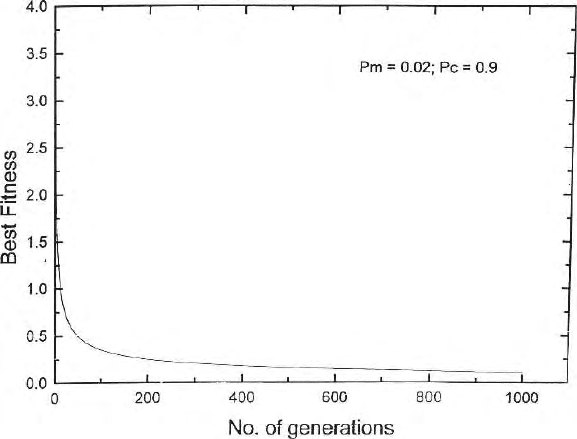
Fig. 17.15. Nature of convergence in two dimensional Genetic algorithm optimiza-
tion
3 or 4 berths. Weaker model have to vacate their berths. Weaker model means,
the models with less probability or higher error function or higher discrepancy
between the observed and predicted data.
Model updating continues this way in successive iterations till one gets the
convergence (Fig. 17.15). Ultimately the stronger models only will occupy all
the berths. Since the parameter values change within a model in successive
crossover, therefore near convergence the parameter values come quite chose
to each other in different models near global minimum point. The number
of models also reduces in successive iteration. Self learnin g process or the
artificial intelligence takes the model search in the direction of high probability
density models and makes it a powerful tool.
17.16 Neural Network
17.16.1 Intro du ction
Neural Network as the name suggests, mimics the functioning of brain. Arti-
ficial Neural Network (ANN) originated to simulate the complex behaviour of
the brain initially. Later it proved to be a versatile tool to be used in many
branches of science and engineering viz., pattern recognition, global optimiza-
tion, noise reduction and classification, data compression etc.
17.16 Neural Network 617
These are some of the areas where artificial neural network can be and is
being used. This subject as such is vast and it is outside the scope of this
book. Here only a few basic points regarding the use of neural network for
global optimization of geophysical data will be highlighted very briefly.
There are mill ions of structure elements within the brain called neurons.
Millions of synapses are formed to connect these neurons so that the brain
becomes a parallel computing system. Synapses are also elements of structural
units, which are responsible for the interaction between the neurons. These
neurons with variable synaptic connection functions as information processing
units in the human brain. In neural network, the structure is made with
artificial neuron interconnected to each other. These artificial neural networks
are designed to function the way the brain do es a particular job. Human brain
is an immensely superior system. ANN networks are trained to a particular
job and it tries to do that job only. Hopfields ( 1975 ) procedure is discussed
briefly.
A Neural networ k can be defined as follows: A neural network is a system
composed of many simple processing elements operating in parallel whose
function is determined by network structure, strengths of the connecting links.
The processing is performed at the nodes or neurons. In global optimization
problem, the structure of ANN consists of an input layer, one or more hidden
layers and an output layer. The number of hidden layers can vary from 1 to
n where the value of n will b e problem dependent. For geophysical inverse
problems the input layer will contain the data and the output layer contains
all the models parameters obtained. Each of the nodes of the input layer is
connected with each of the nodes of the first hidden layer. Nodes of the input
layers are not connected to each other.
Each of the nodes of the output layer is connected to each of the nodes of
the nth hid den layer. That is how a neural net is constructed. The number of
data points of an inverse problem will dictate the number of nodes in the input
layer and the number of parameters to b e retrieved from a set of data will be
equal to the number of nodes in the output layer. How many hidden layers
and how many nodes, required in each hidden layers, are decided thro ugh
repeated experiment while trying to solve a particular problem in a particular
field. Number of nodes in a hidden layer and number of hidden layers in a
problem ar e highly variable parameters. Each of these connections between
the nodes is assigned a certain weightage. These weights are initially selected
at random. Then the learning process or the training process starts. It starts
with known synthetic models for which both inputs and outputs are known.
The message about the discrepancy between actual output and the outputs
obtained with randomly chosen synaptic weights are back propagated through
preceptors and the weights are changed in successive iterations till the actual
output and computed output becomes more or less the same with already
prescribed minimum error level. This learning process is done several times
with noise fr ee synthetic data and then with data mixed with Gaussian noise.
618 17 Inversion of Potential Field Data
Say for one-dimensional direct current resistivity or magnetotelluric prob-
lems, the neural net is trained for 2 to n hidden layers. The same program
trained for different models can be kept separately and used accordingly. The
artificial neural network acquires knowledge through this learning process that
involves modification of the connecting weights. The acquired knowledge is
stored in the form of modified weights. Information processing occurs at the
nodes simultaneously and the weights are gradually modified till the error
function or cost function is modified. Once a neural net is trained for a known
system, it is now ready to take the field data or experimental data to find out
the model. Neural net can function only for which it is trained. A net trained
for some other models or for some other purp o se will generate wrong results.
Therefore the interpreter has to choose the prop erly trained package. Choice
of the forward mo del (ID or 2D or 3D) will dictate the proper choice of the
package. Except random choice of the synaptic weights at the beginning of
the training or learning process, there is nothing random is subsequent stages.
The functioning of the neural network is similar to gradient minimization in
an inverse problem.
17.16.2 Optimization Problem
Theprocedureisasfollows:
Let the desired output values at different nodes are m
true
1
..................
m
true
M
for a known system where a s the actual computed model parameters
for the known synthetic data are m
Pr e
1
..................m
Pr e
M
which passed
through the ra n d on weights. The discrepancy between the actual and observed
values of the model parameters generate the error function
ε
M
=
M
i=1
m
true
i
− m
Pr e
i
2
. (17.211)
One obtains this m
Pr e
1
from all the connecting paths from the hidden layer
(s). Multi channel input comes from the hidden layers to the output layer
to generate a single output at a particular node. Since neural network is a
parallel pr ocessing system, the same pro cess continues at all the nodes with
different interactions with the nodes or neurons of the hidden layer because
the interacting links and the synaptic weights are different. The processing
occur at the say j th node where the signals d
h
j
are coming from the different
input nodes. Each of these input signals are multiplied by their weights to
generate the output function.
m
j
=
n
i=1
W
ji
d
h
i
. (17.212)
These ou t pu t values m
j
pass through a nonlinear activation function, gener-
ally a sigmoidal functions to produce the output M
j
.Here