Russ J.C. Image Analysis of Food Microstructure
Подождите немного. Документ загружается.


This procedure involves measuring the lengths of intercepts with a grid of parallel
lines that is rotated, and is very much like another that can be used to characterize
the anisotropy of a structure. We have seen ways to use vertical sectioning and
cycloidal grids to avoid any bias in determining accurate values for S
V
and L
V
.
However, since many food structures, both natural and man-made, exhibit preferred
orientation to a greater or lesser degree, it is also interesting to find ways to char-
acterize this anisotropy. One method is to represent it by carefully preparing section
planes normal to each of the principal axes of the structure, which can usually be
predicted based on consideration of the history or geometry of the subject. As shown
(a)
(b)
FIGURE 1.32 Diagram of random intercepts through a thick layer, showing frequency dis-
tributions of intercept lengths and the reciprocal of intercept lengths, and the relationship of
those values to the true 3D dimensional thickness of the layer.
Intercept Length
Frequency
True 3D
Thickness
Inverse Intercept Length
Frequency
1 / True 3D
Thickness
Mean Inverse
Intercept Length
2241_C01.fm Page 43 Thursday, April 28, 2005 10:22 AM
Copyright © 2005 CRC Press LLC

in Figure 1.33, it is not possible to understand or measure the structure without using
more than one view. Many structures in food have entirely different appearances in
different orientations. Such pictures as those in Figure 1.34 are only anecdotal and
it is often useful to have numerical representations for comparison.
Creating a grid of parallel lines and applying it to the structure at different
orientations uses the same procedure as the measurement of layer thickness, except
that it is the mean value of the intercept length rather than its inverse that is wanted.
For a space-filling arrangement of cells, the easiest way to get the mean value is to
count intersections of the grid lines with the cell boundaries (mean intercept length
= total line length/number of intersections). Plotting the mean intercept length vs.
angle generates a “rose plot” or radial diagram that identifies the principal axis of
the anisotropy and also its magnitude as shown in Figure 1.35.
(a)
(b)
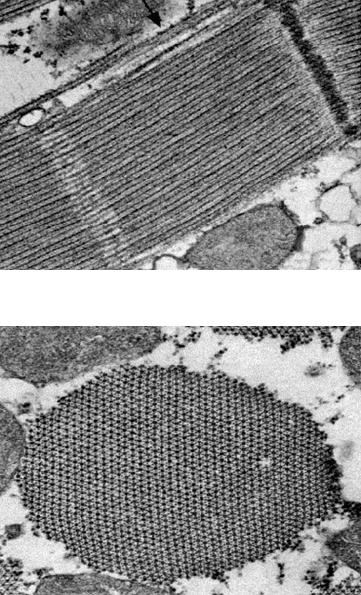
FIGURE 1.33 The appearance of anisotropic structures on perpendicular sections: (a) dia-
gram of equiaxed, needle-like and plate-like cells; (b) three views of a natural layered product.
Equiaxed
Needles Plates
2241_C01.fm Page 44 Thursday, April 28, 2005 10:22 AM
Copyright © 2005 CRC Press LLC
Intercept lengths are used in another way in a technique “known as point sampled
intercepts.” This can be used in conjunction with the disector method to determine
more about the sizes of particles in 3D without making any shape assumptions. The
method requires two steps. First, a grid of points is superimposed on the image. If
the sample structure is very regular or repetitious, this grid should be random, but
in most cases the local structure is sufficiently irregular to allow the use of a regular
grid. The fraction of points that fall onto particles gives the volume fraction of the
particles, which combined with a determination of number per unit volume, allows
calculation of the mean particle size.
The second step is to use each point that lands on a particle to initiate a line.
The line orientations should be isotropic and randomized, using the same procedures
already discussed. If the section is a vertical section, the orientations should be sine-
weighted. Each line extends from the initial point to the edge of the particle in the
chosen direction as shown in Figure 1.36. The length of the intercept line is measured
(r), and used to calculate a volume-weighted mean volume as the mean value of
(4/3·r
3
). The phrase volume-weighted means that the particles are sampled with a
(a)
(b)
FIGURE 1.34 Longitudinal and transverse sections through muscle.
2241_C01.fm Page 45 Thursday, April 28, 2005 10:22 AM
Copyright © 2005 CRC Press LLC

(a)
(b)
FIGURE 1.35 Measurement of anisotropy: (a) longitudinal section through cells in a plant
stalk; (b) measurement results obtained by plotting the mean intercept length with a grid of
parallel lines rotated in 10-degree steps.
Rose Plot of Intercept Length
Mean Intercept Length = 17.4064
Mean Inverse I'cept = 0.09315
Aspect Ration = 1.97269
Num. Icepts = 1416 Units = cm
2241_C01.fm Page 46 Thursday, April 28, 2005 10:22 AM
Copyright © 2005 CRC Press LLC

probability proportional to their volume (which controls the probability that a grid
point will fall on the particle). The mean volume is an estimate of the particle volume
from the radial distance from the random point to the particle boundary. Although
the equation looks like that for the volume of a sphere, actually it is also a correct
way to estimate particle volume for arbitrary shaped objects using random point-
sampled intercepts.
A very useful stereological relationship uses this volume-weighted mean volume
to determine the breadth of the distribution of the conventional (“number-weighted”)
volume. The variance (square of the standard deviation) of that distribution is the
difference between the square of the mean volume (for instance calculated using the
volume fraction and number per unit volume) and the volume-weighted mean vol-
ume. This is independent of particle shape.
Compare this methodology to the attempt to determine the distribution of particle
sizes by assuming a spherical shape, measuring a distribution of circle sizes, and
performing the unfolding operation described at the beginning of this chapter. That
technique is mathematically suspect and critically dependent on a shape assumption,
FIGURE 1.36 The method of point sampled intercepts applied to a confocal microscope
image of partially melted ice crystals in ice cream. A grid of points is superimposed on the
image, and from each point that lies within a crystal a line is drawn to measure the radial
distance to the boundary as described in the text.
2241_C01.fm Page 47 Thursday, April 28, 2005 10:22 AM
Copyright © 2005 CRC Press LLC

and in many cases the only use of the distribution data is to report a mean and
standard deviation. By combining the disector and point sampled intercepts, results
can be obtained without these limitations.
Most of the examples described here have treated images as perfect two-
dimensional representations of an ideal plane through the specimen, to reveal the
internal three-dimensional structure. For an opaque sample examined by reflected
light, or in the SEM or AFM, this is pretty much true (the depth to which electrons
sample beneath the surface in the SEM is usually small compared to the lateral
resolution), although in some cases (e.g., freeze fracture) it is legitimate to wonder
if the plane being viewed is really representative or may be biased in position because
of some weakness or other nonuniformity present in the structure.
For transmission imaging, either by light or electron microscopy, and for con-
focal light microscopy, the image is actually the projection of a finite depth, con-
trolled either by the physical thickness of the slice or by the optical depth of the
field of the instrument. If this thickness is small relative to the dimensions of the
structures of interest, then the approximation of the image as an ideal 2D slice is
acceptable, but if the thickness is great enough this assumption breaks down. Many
of the simple relationships presented above have been adapted to the case of thick
sections, although they generally become more complicated and interdependent, so
that several parameters must be measured in conjunction.
For example, imaging a dense (dark) phase in a section of finite thickness
produces a representation of that phase that is too large (overprojection) as shown
in Figure 1.37. Determining the correct volume fraction of the phase requires mea-
suring both its apparent area fraction and the surface area of the phase (S
V
), because
as shown in the sketch it is along the boundaries of the phase region that the slopes
of the sides produce a greater apparent area than would be seen in a much thinner
section. The relationship is
(1.12)
where t is the actual slice thickness. Another way to determine a correct volume
fraction is to measure the area fraction in two images from slices of different (known)
thicknesses, and calculate the true volume fraction from that. In all cases, it is
necessary to accurately know the actual thickness of the imaged slice, which is not
always easy to determine.
There are many other stereological relationships available. Many of them have
subtle derivations that involve integral geometry and have been developed by experts.
FIGURE 1.37 Overprojection in a thick section. The apparent size of dense particles or phase
regions is enlarged so that the apparent volume fraction is increased.
VA A S
VA A V
t
true apparent
== −⋅
4
2241_C01.fm Page 48 Thursday, April 28, 2005 10:22 AM
Copyright © 2005 CRC Press LLC
But in most cases the application of the technique is straightforward, involving a
specific procedure for sample preparation, with the use of an appropriate grid to
achieve IUR probes, followed by counting or measurement of the intersection of the
grid with the features of interest. In the chapters that follow, computer-based image
processing methods will be used to perform the steps that accomplish the measure-
ment procedures. In many cases this is more efficient than carrying out the same
steps by hand, using photographs with grids (usually printed on transparent sheets
to lay on top of the photos), with manual marking and counting of the hits. But the
underlying principles and proper interpretation of the results for each procedure
remain the same for entirely manual execution.
It is important to understand what each technique measures, and to select a
method appropriate to the type of sample and features of interest. In addition to
publications of results in applications-related journals, many stereological proce-
dures are published in the Journal of Microscopy (Royal Microscopical Society,
Oxford, U.K.) or in Acta Stereologica (published by the International Society for
Stereology). Several recent books, Unbiased Stereology (C. V. Howard and M. G.
Reed, Bios Scientific, 1998) and Principles and Practice of Unbiased Stereology
(P. R. Mouton, Johns Hopkins University Press, 2002) cover primarily the new
stereological techniques that emphasize design-based sampling procedures. Practi-
cal Stereology, 2nd edition (J. C. Russ and R. T. Dehoff, Plenum Press, 2002) covers
both the classical and new methods, with many worked examples. A much older
text, Quantitative Microscopy (R. T. Dehoff and F. N. Rhines, 1968, McGraw Hill),
contains a good guide to classical stereology.
2241_C01.fm Page 49 Thursday, April 28, 2005 10:22 AM
Copyright © 2005 CRC Press LLC

2
Image Acquisition
Having established in Chapter 1 that images provide a means by which to study the
structure of food products, we must now consider how to acquire those images.
Traditional photography is often sufficient if the measurements are to be performed
manually, such as by placing transparent overlays containing grids onto photographic
prints, and counting stereological events. But the emphasis in this text is on the use
of computers to facilitate and in many cases automate those operations, so it is
important to consider ways to digitize the images for storage in the computer.
One very important topic that is not addressed here at all is sample preparation.
The range of techniques that are used is so broad for the various types of natural
and prepared food materials that covering it would require many volumes and the
expertise of many experienced researchers. In some cases nothing more than scat-
tering particles on a contrasting substrate, or using a razor blade to cut a section is
required. In other situations, rapid freezing followed by fracturing and coating is
needed. Chemical fixatives and stains are widely used. Techniques for electron
microscopy differ from those for light microscopy, and so forth. The current literature
is generally the best source for reviews of existing techniques and reports of new
ones. The goal is to preserve the fine details of structure without alteration or
deterioration, with sufficient contrast to show that structure with the chosen imaging
technology. The appropriate methods are generally the same for digital image pro-
cessing as for conventional photographic recording.
SCANNERS
Photographic recording of images from macro cameras and microscopes is a
well-known and widely practiced technique for obtaining images of food structure.
Film is a very convenient way to record and store images, with well understood
characteristics. Continuing to use film may be a good solution in many cases, as it
allows direct comparison of images to existing archives that contain a rich treasure
of images useful for various measurements. Relatively inexpensive scanners are
available to digitize these images into a stored array of pixels within the computer.
Scanners are basically of two types. Flat-bed desktop scanners are primarily
designed to scan prints using reflected light (although some units also have limited
ability to handle transparencies and negatives). Since photographic prints have decid-
edly inferior dynamic range or gamut compared to the negatives from which they
are produced, it is always preferable to scan the negatives rather than the prints if
those are available. But flat bed scanners have another use that is less advertised,
namely to directly image samples placed on them. Scattering particulates onto the
2241_C02.fm Page 51 Thursday, April 28, 2005 10:23 AM
Copyright © 2005 CRC Press LLC

scanner, or placing the cut surface of fruit, bread or meat onto the glass (as shown
in Figure 2.1
)
, provides a simple way to capture an image with quite high resolution
and good color rendition. The sample must be relatively flat, because the depth of
field is typically no more than about 1 cm. However, using cold foods may cause
condensation on the underside of the glass.
The issues of spatial resolution and dynamic range come up again and again in
discussing image acquisition, so it will be useful to deal with them here. Spatial
resolution is usually defined in terms of points per inch (or dots per inch — dpi),
and corresponds more-or-less to the size of structure that can be identified in the
image (technically, the features must be at least twice the size of the measured points
in order to be distinguished from their neighbors). Local contrast also plays a role
in the ability to see small features, as well as be seen later on. Many desktop scanners
currently offer optical resolutions of 1000 to 3000 dpi. Ignore any specification for
interpolated resolution, as that simply expands the real data to produce a larger array
of stored pixels but, like any other empty photographic magnification, does not reveal
any additional information.
The ability to acquire an image with (for example) 2000 dpi of real resolution
over a distance of 8 inches produces a huge amount of information. That would
correspond to a 16,000
×
16,000 pixel stored image, or 256 million pixels, with each
pixel representing a dimension of 12.5
µ
m on the specimen. This generates a large
image file, but one that most modern desktop computers and software can accom-
modate (as an example, Adobe Photoshop® accepts images with dimensions up to
FIGURE 2.1
Using a flatbed scanner to directly image beef steaks.
2241_C02.fm Page 52 Thursday, April 28, 2005 10:23 AM
Copyright © 2005 CRC Press LLC
30,000 pixels on a side, and uses virtual memory on disk to handle images larger
than will fit into memory). A digital camera connected to a macro lens can certainly
achieve a spatial resolution of 2000 dpi, but over a much smaller distance of an inch
or two. To image such a large area would require a corresponding reduction in spatial
resolution. So for situations in which images of sections through food products can
be obtained by cutting them and placing them on a flatbed scanner, doing so provides
an extremely high quality result at a very low cost and with great convenience.
Figure 2.2 shows a representative application.
With a scanner, there is no concern about focusing (provided the sample is
relatively flat) or achieving uniform lighting. The hardware takes care of that
(although avoiding the very edge of the platform, where light intensity may fall off
slightly, is a good idea). There may be some clean-up problems, but these are at
most a minor nuisance. The time required for scanning is typically tens of seconds,
but that is usually fast enough. Scanners come with a variety of standard interfaces,
ranging from older SCSI (small computer systems interface) to the newer, faster,
and more trouble free USB (universal serial bus) or IEEE 1394 (widely known as
firewire). Many scanners are bundled with software such as Adobe Photoshop that
provides a good platform for image acquisition, storage, printing, and some of the
processing techniques discussed below and in subsequent chapters.
Scanners also typically have a high dynamic range. This is usually specified as
bits of information in each channel. The scanners have sensors that read the red,
green, and blue light intensity separately. This is typically done by using one or
several linear sensors with colored filters that are mechanically scanned across the
area. The maximum dynamic range is determined in part by the well size of the
detectors, that is, the number of electrons that can be accommodated, and the noise
level of the electronics used for readout. The readout is much slower than a typical
digital camera (and considerably slower than a video camera). This results in less
noise and a higher dynamic range.
In any case, the individual red, green, and blue light intensities from points on
the sample are digitized — converted to a numerical value — for transmission to
and storage in the computer. An 8-bit image, for example, uses one computer byte
to store each of the RGB channel values, and since 2
8
is 256, it can represent 256
discrete brightness values in each channel. That may seem like a lot, and for some
purposes it is. Display of the image on the computer screen for human viewing, and
printing the image out as hardcopy, does not require more than 8 bits and can be
adequately accomplished in most cases with less. But for many of the image pro-
cessing operations to be described, and to detect small variations in brightness that
may represent local structural details in an image that has a large overall contrast
range between bright and dark values, it is best to have more tonal resolution than
the 256 values provided by 8 bits. Indeed, many professional photographers suggest
that all work on digital photographs be performed in a 16 bit space, only reducing
the image to 8 bits for the final printout (because printers cannot handle and do not
need the increased amount of information).
Actually, few detectors and scenes have 16 bits of information (2
16
= 65536).
Photographic prints do not typically have as much as 8 bits of data, although the
negatives can be much better as discussed below. In astronomy, where stars are very
2241_C02.fm Page 53 Thursday, April 28, 2005 10:23 AM
Copyright © 2005 CRC Press LLC