Samarskii A.A., Vabishchevich P.N. Numerical Methods for Solving Inverse Problems of Mathematical Physics
Подождите немного. Документ загружается.

236 Chapter 6 Right-hand side identification
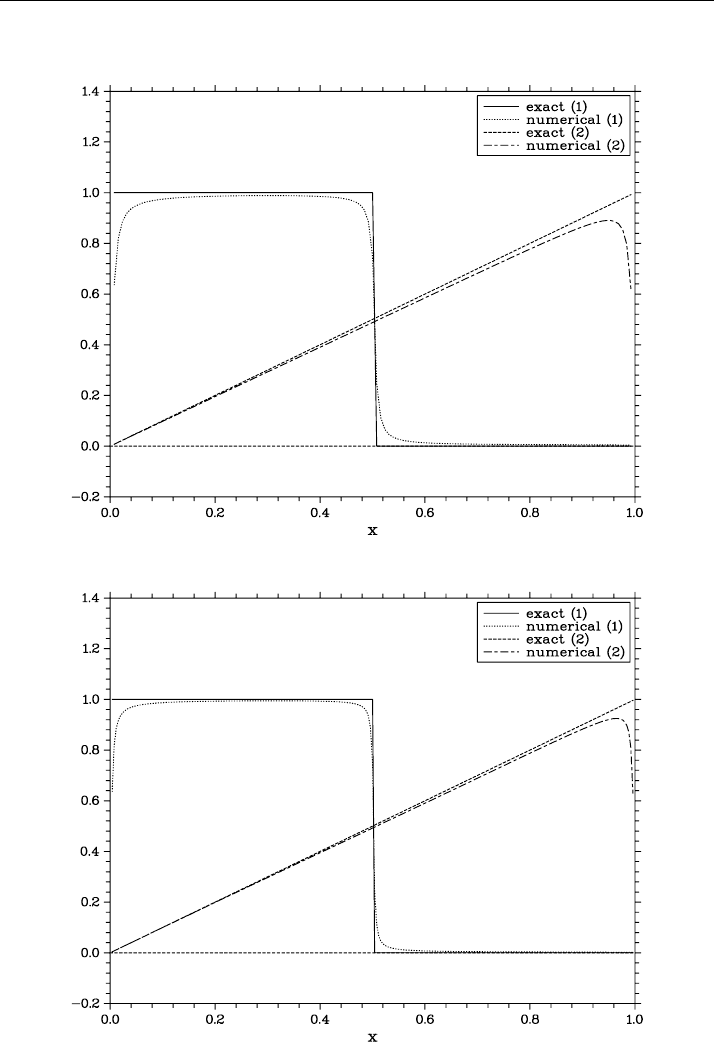
Figure 6.19 Solution of the problem obtained on the grid N
1
= N
2
= 129
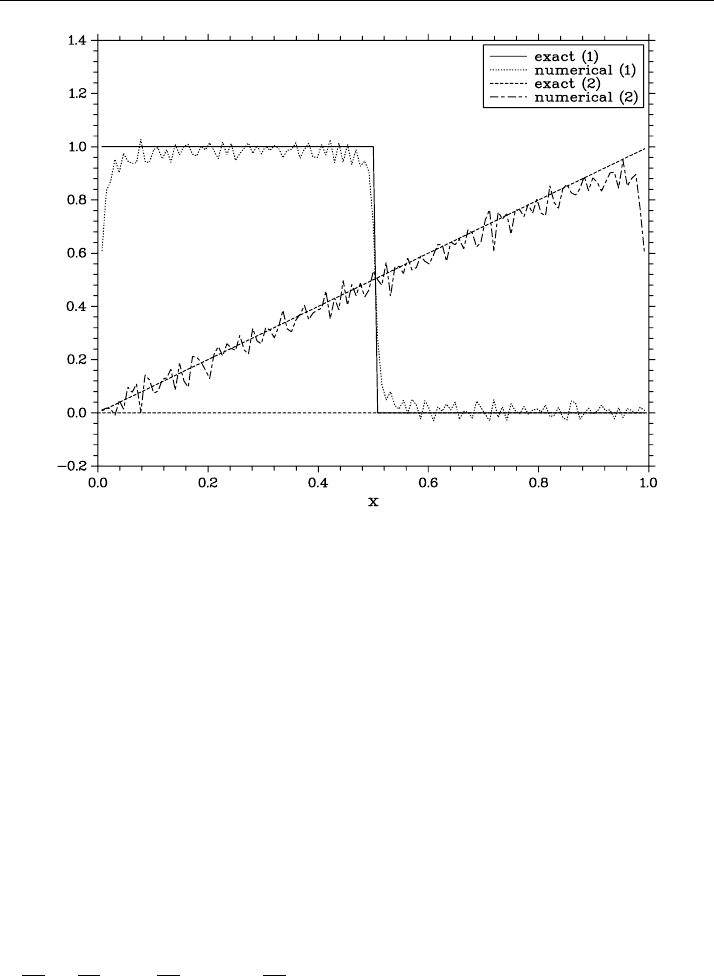
Figure 6.20 Solution of the problem obtained on the grid N
1
= N
2
= 257
Section 6.6 Exercises 237
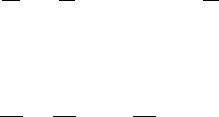
Figure 6.21 Solution of the problem obtained at the inaccuracy level δ = 0.0003
6.6 Exercises
Exercise 6.1 Formulate the condition for convergence of the approximate solution
determined from (6.16), (6.17), (6.19) to the solution of problem (6.14).
Exercise 6.2 Substantiate the iteration method (6.26) as applied to the approximate
solution of problem (6.14), (6.16).
Exercise 6.3 Modify the program PROBLEM5 so that to make it suitable for solving
the inverse problem (6.14), (6.16) by the iteration method (6.26). Give a comparative
analysis of the methods.
Exercise 6.4 Consider the basic specific features of the Tikhonov regularization
method as applied to solving the inverse problem on the identification of the right-
hand side of parabolic equation with lower terms
∂u
∂t
=
∂
∂x
k(x)
∂u
∂x
+ b(x)
∂u
∂x
+ f (x, t), 0 < x < l, 0 < t ≤ T,
from a given function u(x, t).
Exercise 6.5 Construct an iterative local-regularization algorithm making it possible
to identify the right-hand side of the parabolic equation (6.45) from an approximately
given solution of the boundary value problem (6.45)–(6.47).

238 Chapter 6 Right-hand side identification
Exercise 6.6 Using the program PROBLEM6, numerically examine the rate of con-
vergence of the approximate solution of the inverse problem to the exact solution as
dependent on the input-data inaccuracy.
Exercise 6.7 Consider the first boundary value problem for the loaded parabolic equa-
tion:
∂u
∂t
=
∂
∂x
k(x)
∂u
∂x
+ c(x)u(x
∗
, t) + f (x, t), 0 < x < l, 0 < x
∗
< l,
u(0, t) = 0, u(l, t) = 0, 0 ≤ t ≤ T,
u(x, 0) = u
0
(x), 0 < x < l.
In this problem, formulate the applicability conditions for the maximum principle and,
on this basis, establish solution uniqueness.
Exercise 6.8 Examine the convergence of the solution of the difference problem
(6.98)–(6.100) to the solution of the differential problem (6.94), (6.95).
Exercise 6.9 Based on calculations performed on a sequence of progressively refined
grids and using the program PROBLEM7, examine the accuracy in reconstructing the
time-dependent right-hand side of parabolic equation (6.84), (6.88) under conditions
(6.86), (6.87), (6.89).
Exercise 6.10 Examine the rate of convergence of the difference scheme (6.127),
(6.128) as applied to problem (6.111)–(6.114).
Exercise 6.11 Suppose that we solve the equation
Ay = f
in which
A = A
0
+ A
1
, A
0
= A
∗
0
> 0, A
1
=−A
∗
1
.
To modify the initial problem, we use symmetrization:
˜
Ay =
˜
f ,
where
˜
A = A
∗
A
−1
0
A,
˜
f = A
∗
A
−1
0
f.
We use the iteration method
A
0
y
k+1
− y
k
τ
k+1
+
˜
Ay
k
=
˜
f , k = 0, 1,....
Examine the rate of convergence in this method under the conditions
A
1
y
2
≤ M(y, A
0
y), M = const > 0.

Section 6.6 Exercises 239
Exercise 6.12 Using the program PROBLEM8, numerically examine the convergence
of the right-hand side as reconstructed in different norms.
Exercise 6.13 Consider the inverse problem (6.144)–(6.146) under the condition that
f (x) = ϕ(x
2
1
+ x
2
2
).
In which case the solution of this problem is unique?
Exercise 6.14 Obtain an a priori estimate for the solution of the difference problem
(6.162), (6.163).
Exercise 6.15 Propose procedures for preliminary treatment of noisy input data in
the solution of the right-hand side identification problem (6.144), (6.145), (6.147),
(6.150) making it possible to obtain possibly more smooth solution. Modify the pro-
gram PROBLEM9 to practically examine the possibilities offered by these procedures.
7 Evolutionary inverse problems
In the present chapter, inverse problems for non-stationary mathematical physics equa-
tions are considered whose specific feature consists in that the initial state of the system
is not specified. A most typical example here is given by the inverted-time problem for
the second-order parabolic equation. Such problems belong to the class of problems
ill-posed in the classical sense; they can be approximately solved by various versions
of main regularizing algorithms. Among the latter algorithms, variational methods can
be identified in which non-locally perturbed initial conditions are used. In the second
class of methods, perturbed equations are used for which a well-posed problem can be
posed (generalized inverse method). Regularizing algorithms enabling the solution of
unstable evolutionary problems can be constructed using the regularization principle, a
general guiding principle that makes it possible to obtain operator-difference schemes
of desired quality. Of great potential are iterative algorithms for solving evolution-
ary inverse problems, capable of adequately taking into account specific features of
particular problems and based on successive solution of several direct problems. The
consideration is performed on the differential and difference levels. Numerical results
for model problems are cited to illustrate theoretical results.
7.1 Non-local perturbation of initial conditions
In this section, we consider the inverse inverted-time problem for the parabolic equa-
tion. To approximately solve the problem, we use a regularizing algorithm with non-
locally perturbed initial conditions. A close relation between this algorithm and varia-
tional solution methods for such ill-posed problems is established.
7.1.1 Problem statement
As a model problem, consider the inverted-time problem for the one-dimensional
parabolic equation. In the rectangle
Q
T
= × [0, T ], ={x | 0 ≤ x ≤ l}, 0 ≤ t ≤ T
the function u(x, t) satisfies the equation
∂u
∂t
+
∂
∂x
k(x)
∂u
∂x
= f (x, t), 0 < x < l, 0 < t ≤ T , (7.1)
with k(x) ≥ κ>0. We restrict the present consideration to the boundary value
problem with the first-kind homogeneous boundary conditions
u(0, t) = 0, u(l, t) = 0, 0 < t ≤ T (7.2)

Section 7.1 Non-local perturbation of initial conditions 241
and with the initial condition
u(x, 0) = u
0
(x), 0 ≤ x ≤ l. (7.3)
We can conveniently consider problem (7.1)–(7.3) as a Cauchy problem for the
second-order differential-operator equation. For functions defined in the domain =
(0, 1) and vanishing at the boundary ∂, we define a Hilbert space H = L
2
(),in
which the scalar product is defined as
(v, w) =
v(x)w(x) dx.
For the norm in H, we use the usual setting
v=(v, v)
1/2
=
v
2
(x) dx
1/2
.
On the set of functions satisfying the boundary conditions (7.2), we define the op-
erator
Au =−
∂
∂x
k(x)
∂u
∂x
, 0 < x < l. (7.4)
The operator A is a positive definite self-adjoint operator in H:
A
∗
= A ≥ mE, m > 0. (7.5)
Equation (7.1), supplemented with conditions (7.2) at the boundary, is written as a
differential-operator equation for the function u(t) ∈ H:
du
dt
− Au = f (t), 0 < t ≤ T. (7.6)
The initial condition (7.3) gives
u(0) = u
0
. (7.7)
Problem (7.6), (7.7) is an ill-posed problem because continuous dependence on input
data, namely, on the initial conditions, is lacking here.
7.1.2 General methods for solving ill-posed evolutionary problems
The evolutionary inverse problem (7.6), (7.7) can be solved using, in this or another
version, all the above-discussed approaches to solving ill-posed problems which were
previously considered as applied to the first-kind operator equation
Au = f.
The right-hand side of the latter equation is given with some inaccuracy and, in addi-
tion,
f
δ
− f ≤δ.
242 Chapter 7 Evolutionary inverse problems
In the Tikhonov method, the approximate solution u
α
is to be found as follows:
J
α
(u
α
) = min
v∈H
J
α
(v),
J
α
(v) =Av − f
δ
2
+ αv
2
.
As applied to the evolutionary problem (7.6), (7.7), the Tikhonov method corre-
sponds to the solution of an optimal control problem for equation (7.6). Here, the
point of interest concerns the start control and the final observation.
The optimal control problem for (7.6), (7.7) can be formulated as follows. Let
v ∈ H be an unconstrained control. Define the function u
α
= u
α
(t;v) as the solution
of the following well-posed problem:
du
α
dt
− Au
α
= f (t), 0 < t < T, (7.8)
u
α
(T ;v) = v. (7.9)
We adopt the following simplest form of the quadratic quality functional (smoothing
functional):
J
α
(v) =u
α
(0;v) − u
0
2
+ αv
2
. (7.10)
The optimal control w can be found as a minimum of J
α
(v):
J
α
(w) = min
v∈H
J
α
(v), (7.11)
and the related solution u
α
(t,w) of problem (7.8), (7.9) can be considered as an ap-
proximate solution of the ill-posed problem (7.6), (7.7).
The variational problem (7.8)–(7.11) can be approximately solved by various nu-
merical methods. In gradient methods, the minimizing sequence {v
k
}, k = 1, 2,...,K
can be constructed by the rule
v
k+1
= v
k
+ γ
k
p
k
,
where p
k
is the descend direction and γ
k
is the descend parameter. In the sim-
plest case, the descend direction can be directly related with the gradient of (7.10):
p
k
=−grad J
α
(v
k
). An unusual feature here consists in the necessity to calculate a
functional gradient. That is why in the solution of applied inverse problems by varia-
tional methods the latter point deserves special attention.
In the Tikhonov method, instead of the extremum problem, we solve a related Euler
equation. In the latter case, the approximate solution is to be found by solving the
second-kind equation
A
∗
Au
α
+ αu
α
= A
∗
f
δ
.
Thus, the transition to a well-posed problem is performed by passing to a problem with
the self-adjoint operator A
∗
A, which can be done by multiplying the initial equation

Section 7.1 Non-local perturbation of initial conditions 243
from the left by A
∗
, and by subsequent perturbation of the resulting equation with an
operator α E.
Note the class of approximate solution methods for ill-posed evolutionary problems
of type (7.6), (7.7) based on the passage to a perturbed well-posed problem; these
methods are known as generalized inverse methods. Consider briefly major variants of
the generalized inverse method for problem (7.6), (7.7) in which the perturbed initial
equation (7.6) is used.
In the classical variant of the generalized inverse method, the approximate solution
u
α
(t) is to be found from the equation
du
α
dt
− Au
α
+ αA
∗
Au
α
= 0. (7.12)
In the class of bounded solutions, one can establish the regularizing properties, namely,
the convergence of the approximate solution to the exact solution in the class of
bounded solutions.
Also, a variant of the generalized inverse method for stable solution of problem
(7.6), (7.7) with A = A
∗
can be applied; in this method, the following pseudo-
parabolically perturbed equation is treated:
du
α
dt
− Au
α
+ αA
du
α
dt
= 0. (7.13)
In the approximate solution of inverse mathematical physics problems (problem
(7.1)–(7.3)), the first variant of the generalized inverse method (see (7.12)) is based
on raising the order of the differential operator over space (instead of A, the operator
A
∗
A is used). In the second variant of the generalized inverse method (see (7.13)), the
problem suffers no such dramatic changes.
Some other possibilities in the regularization of the problem at the expense of ad-
ditional terms deserve mention. In the context of the general theory of approximate
solution of ill-posed problems, these variants border on the variant of simplified regu-
larization in which in the problem with A = A
∗
≥ 0 to be solved is the equation
Au
α
+ αu
α
= f
δ
,
i. e., here, one can restrict himself to perturbing the operator of the initial problem only.
7.1.3 Perturbed initial conditions
A most significant class of approximate methods for solving ill-posed evolutionary
problems is based on using perturbed initial conditions instead of passing to some new
equation like in the ordinary variant of the generalized inverse method. This approach
can appear to be more reasonable in problems with initial conditions specified with an
inaccuracy.

244 Chapter 7 Evolutionary inverse problems
In methods with perturbed initial conditions, the extremum formulation of prob-
lems has found a most widespread use. The optimum control problem for systems
governed by the evolutionary equations of interest can be solved using these or those
regularization methods. To this class of approximate solution methods for unstable
evolutionary problems, methods with non-locally perturbed initial conditions can be
assigned. In the latter case, the regularizing effect is achieved due to the established
relation between the initial solution and the end-time solution.
Special attention should be paid to the equivalence between the extremum formula-
tion of ill-posed evolutionary problems and non-local problems. The latter allows us
to perform a uniform consideration of non-local perturbation methods and extremum
solution methods for evolutionary problems. Moreover, the equivalence between these
methods makes it possible to construct computational algorithms based on this or an-
other formulation of the problem. For instance, in some cases, instead of solving
a related functional-minimization problem, one can use simple computational algo-
rithms for solving non-local difference problems. Nonetheless, opposite examples are
also known in which construction of computational algorithms around an extremum
formulation is more preferable.
To approximately solve the ill-posed problem (7.6), (7.7) (with f (t) = 0), apply the
method with non-locally perturbed initial condition. We find the approximate solution
u
α
(t) as the solution of the equation
du
α
dt
− Au
α
= 0, 0 < t ≤ T (7.14)
with the initial condition (7.7) replaced with the simplest non-local condition
u
α
(0) + αu
α
(T ) = u
0
. (7.15)
Here, the regularization parameter α is positive (α>0).
Let us derive estimates for the solution of the non-local problem with regard to the
above-formulated constraint on the operator A (A = A
∗
> 0). Of primary concern
here is stability of the approximate solution u
α
(t) with respect to initial data.
Our consideration is based on using the expansion of the solution in eigenfunctions
of A. Not restricting ourselves to the case of (7.4), (7.5), we denote as A a linear
constant (t-independent) operator with a domain of definition D(A), dense in H.We
assume that the operator A is positive definite self-adjoint in H; generally speaking,
this operator is an unbounded operator. For simplicity, we assume that the spectrum
of A is discrete, consisting of eigenvalues 0 <λ
1
≤ λ
2
≤···, and the system of
eigenfunctions {w
k
}, w
k
∈ D(A), k = 1, 2,... is an orthonormal complete system
in H. That is why for each v ∈ H we have:
v =
∞
k=1
v
k
w
k
,v
k
= (v, w
k
).
Section 7.1 Non-local perturbation of initial conditions 245
Theorem 7.1 For the solution of problem (7.14), (7.15) the following estimates are
valid:
u
α
(t)≤
1
α
u
0
, (7.16)
u
α
(t)≥
1
1 + α
u
0
. (7.17)
Proof. To prove the above theorem, we write the solution of problem (7.14), (7.15) as
u
α
= R(t,α)u
0
. (7.18)
In problem (7.14), (7.15), the operator R(t,α)can be written as
R(t,α) = exp (At)(E + α exp (AT ))
−1
. (7.19)
In view of (7.18) and (7.19), the solution of the non-local problem admits the fol-
lowing representation:
u
α
(t) =
∞
k=1
(u
0
,w
k
) exp (λ
k
t)(1 + α exp (λ
k
T ))
−1
w
k
. (7.20)
With (7.20), we have:
u
α
(t)
2
=
∞
k=1
(u
0
,w
k
)
2
exp (2λ
k
)(1 + α exp (λ
k
T ))
−2
.
From here, with allowance for λ
k
> 0, k = 1, 2,..., the desired inequalities (7.16),
(7.17) readily follow.
Remark 7.2 Estimate (7.16) guarantees stability of the solution with respect to initial
data (upper estimate), and inequality (7.17) gives a lower estimate of the solution of
the non-local problem.
Remark 7.3 Note that the lower estimate (7.17) can be obtained directly from (7.14),
(7.15) under an assumption that the time-independent operator A is not necessarily a
self-adjoint yet non-negative operator (A ≥ 0). To derive this estimate, we scalar-
wise multiply equation (7.14) by u
α
(t) to obtain the following estimate typical of the
parabolic equation with inverted time:
u
α
(t)≤u
α
(T ). (7.21)
With (7.21), the non-local condition (7.15) yields
u
0
=u
α
(0) + αu
α
(T )≤u
α
(0)+αu
α
(T )≤(1 + α)u
α
(T ).
We have proved that the problem with conditions (7.14), (7.15), non-local over time,
is a well-posed problem. Now, we can discuss a more fundamental matter, namely, un-
der which conditions solution of problem (7.14), (7.15) gives an approximate solution
of the ill-posed problem (7.6), (7.7) (with f (t) = 0).