Schulz M. Control Theory in Physics and Other Fields of Science: Concepts, Tools, and Applications
Подождите немного. Документ загружается.

8.5 Kalman Filter 237
dZ
k
(t)G(t)Z
k
(t)
dt
= Z
k
(t)G(t)C
T
(t)Θ
−1
C(t)G(t)Z
k
(t)
+Z
k
(t)ΩZ
k
(t) . (8.120)
Thus, the performance functional (8.102) can be written as
J
k
(t)=
1
2
Z
k
(0)σZ
k
(0) +
1
2
t
0
dt
dZ
k
(t
)G(t
)Z
k
(t
)
dt
=
1
2
Z
k
(t)G(t)Z
k
(t)
=
1
2
e
k
G(t)e
k
. (8.121)
The last stage of this relation is a consequence of (8.107). On the other hand,
the performance may also be written as (8.97)
J
k
(t)=
1
2
(x
k
(t) − #x
k
(t))
2
=
1
2
e
k
"
X(t) −
#
X(t)
◦
"
X(t) −
#
X(t)
e
k
=
1
2
e
k
X(t) −
#
X
u
(t)
◦
X(t) −
#
X
u
(t)
e
k
. (8.122)
The comparison of (8.121) with (8.122) yields
G
αβ
(t)=
X
α
(t) −
#
X
u,α
(t)
X
β
(t) −
#
X
u,β
(t)
(8.123)
where we have used the component representation. Thus, the matrix G is the
variance of the optimal estimation error. Thus, G(t) gives a direct information
about how good is the estimate performed on the basis of the data available
up to the current time t.
8.5.3 Ljapunov Differential Equation
Let us now introduce the difference Z(t)=X(t) −
#
X
u
(t) between the current
state and its estimation. Because of (8.113), (8.85), and (8.86), we obtain the
evolution equation
˙
Z =
A − GC
T
Θ
−1
C
Z − GC
T
Θ
−1
η(t)+ξ(t) (8.124)
and therefore
˙
Z =
A − GC
T
Θ
−1
C
Z. (8.125)
Because of
4
Z(0) = X(0) − X
0
= 0, the last equation requires Z(t)=0.On
the other hand, we know from (8.123) that
Z
α
(t)Z
β
(t)=G
αβ
(t) . (8.126)
4
Recall that
#
X
u
(0) = X
0
(see (8.114)).
238 8 Filters and Predictors
The second quantity we may analyze is the fluctuation of the optimal estima-
tion, W (t)=
#
X
u
(t) −
#
X
u
(t) with W (t) = 0. From (8.113), (8.85), and (8.86)
we obtain the evolution equation
˙
W =
A − GC
T
Θ
−1
C
W
+GC
T
Θ
−1
C
X(t) − X
+ GC
T
Θ
−1
η(t)
= AW + GC
T
Θ
−1
CZ + GC
T
Θ
−1
η(t) , (8.127)
where we have used in the last stage the identity
X =
#
X
u
(corresponding to
Z(t) = 0). We are now interested in the correlations between both quantities,
Z(t)andW (t). Thus, we may combine (8.125) and (8.127)to
d
dt
−→
Ψ = M
−→
Ψ + H
−→
ξ (8.128)
with
−→
Ψ =
Z
W
M =
A − GC
T
Θ
−1
C 0
GC
T
Θ
−1
CA
(8.129)
and
H =
I −GC
T
Θ
−1
0 GC
T
Θ
−1
−→
ξ =
ξ
η
. (8.130)
The formal solution of (8.128) is given by
−→
Ψ (t)=U(t, 0)
−→
Ψ (0) +
t
0
dt
U(t, t
)H(t
)
−→
ξ (t
) (8.131)
with
∂
∂t
U(t, t
)=M(t)U(t, t
)andU(t, t)=1. (8.132)
Thus we obtain
F (t)=
−→
Ψ (t)
−→
Ψ
T
(t)
= U(t, 0)
−→
Ψ (0)
−→
Ψ
T
(0)U
T
(t, 0)
+
t
0
dt
U(t, t
)H(t
)KH
T
(t
)U
T
(t, t
) , (8.133)
where we have introduced the correlation matrix K via
−→
ξ (t
)
−→
ξ
T
(t)=Kδ (t − t
) . (8.134)
The derivative of (8.133) with respect to the time yields the so-called differ-
ential Ljapunov equation
d
dt
F (t)=M(t)F (t)+F (t)M
T
(t)+H(t)KH
T
(t) . (8.135)
8.5 Kalman Filter 239
Because of (8.88), the correlation matrix has the form
K =
Ω 0
0 Θ
. (8.136)
Hence, we obtain from (8.135) the relations
d
dt
ZZ
T
=
A − GC
T
Θ
−1
C
ZZ
T
+ZZ
T
A
T
− C
T
Θ
−1
CG
+ Ω + GC
T
Θ
−1
CG (8.137)
and
d
dt
ZW
T
=
A − GC
T
Θ
−1
C
ZW
T
+ZZ
T
C
T
Θ
−1
CG + ZW
T
A
T
− GC
T
Θ
−1
CG (8.138)
as well as
d
dt
WW
T
=(A + GC
T
Θ
−1
C)ZW
T
+ AWW
T
+ WZ
T
C
T
Θ
−1
CG + WW
T
A
T
+ GC
T
Θ
−1
CG
T
. (8.139)
The first equation is because of (8.126) equivalent to the Ricatti equation
(8.104) and corresponds to the above-derived identity (8.126). The second
equation, (8.138), has the initial condition
Z(0)W
T
(0) = 0 due to (8.114).
On the other hand, (8.138) is a homogeneous differential equation because of
(8.126). Because of the initial condition, we get the unique solution
Z(t)W
T
(t)=0. (8.140)
Thus, the third equation reduces again to a differential equation of the
Ljapunov type
d
dt
WW
T
= AWW
T
+ WW
T
A
T
+ GC
T
Θ
−1
CG
T
. (8.141)
8.5.4 Optimal Control Problem for Kalman Filters
We come now to the second point of our problem, namely the control of a
system on the basis of the filtered data. We consider a quadratic functional
of type (7.83)
J[X
,τ,u,T]
=
1
2
T
τ
dt
X(t)Q(t)X(t)
X(τ )=X
+ u(t)R(t)u(t)
X(τ )=X
, (8.142)
which we will minimize. We replace X(t)byZ(t)+
#
X
u
(t) and obtain
X(t)Q(t)X(t)=
#
X
u
(t)Q(t)
#
X
u
(t)
+2
Z(t)Q(t)
#
X
u
(t)+Z(t)Q(t)Z(t) . (8.143)
240 8 Filters and Predictors
The second term can be rewritten as
Z(t)Q(t)
#
X
u
(t)=Z(t)Q(t)W (t) = 0 (8.144)
because of (8.140) as well as
Z(t)=0andW (t)=
#
X
u
(t) −
#
X
u
(t). The third
term becomes
Z(t)Q(t)Z(t)=Q
αβ
(t)Z
α
(t)Z
β
(t)
=
α,β
Q
αβ
(t)G
αβ
(t)
=trQ(t)G(t) . (8.145)
Hence, the performance can now be written as
J[X
,τ,u,T]
=
1
2
T
τ
dt
#
X
u
(t)Q(t)
#
X
u
(t)
X(τ )=X
+ u(t)R(t)u(t)
X(τ )=X
+
1
2
T
τ
dt [tr Q(t)G(t)] (8.146)
and we get together with the evolution equation (8.113), a linear quadratic
problem for the estimated state. This equation may be written as
˙
#
X
u
= A
#
X
u
+ Bu + GC
T
Θ
−1
(Y − C
#
X
u
) , (8.147)
where
Y − C
#
X
u
= C
X −
#
X
u
= CZ (8.148)
is a random quantity with zero mean (see Sect. 8.5.3). Hence, the optimal
control law is given by
u
∗
(t)=−R
−1
(t)B
T
P (t)
#
X
∗
u
(8.149)
with P (t) as a solution of the Ricatti equation
˙
P + A
T
P + PA− PBR
−1
B
T
P = −Q (8.150)
with the final condition P (T ) = 0 and the optimal controlled estimation
˙
#
X
∗
u
= A
#
X
∗
u
− BR
−1
(t)B
T
P (t)
#
X
∗
u
+ GC
T
Θ
−1
(Y − C
#
X
∗
u
) . (8.151)
The result is again a feedback control with a stochastic input at the right-hand
side of (8.151).
Let us illustrate the idea of a controlled filter by a simple example. We
consider the one-dimensional motion of a Brownian particle, which should be
localized at a certain point in space. Without any restriction, this may be
the origin of our coordinate system. Then we have the stochastic evolution
equation
8.5 Kalman Filter 241
˙
X = u + ξ, (8.152)
where u(t) is the control force and ξ is the noise. As localization functional
we use the quadratic form (8.142) with constant coefficients Q and R. Then,
the optimal feedback control law (7.92) yields
u
∗
= −R
−1
G(t)X
∗
(t) (8.153)
with G(t) a solution of the Ricatti equation (8.150)
˙
G − R
−1
G
2
= −Q (8.154)
with the final condition G(T ) = 0. Hence, we get
G(t)=
!
QR tanh
√
Q(T − t)
√
R
(8.155)
and the optimal control trajectory is described by an effective Ornstein-
Uhlenbeck process
˙
X
∗
= −
)
Q
R
tanh
)
Q
R
(T − t) X
∗
+ ξ. (8.156)
The main problem is that this control requires the precise determination of
the particle position. In fact, each observation has an intrinsic error. Thus, we
measure not the current position X(t) but
Y (t)=X(t)+η. (8.157)
If we now interpret this observation as the true position, we have the appar-
ently feedback control law
u = −
)
Q
R
tanh
)
Q
R
(T − t) Y (8.158)
and therefore the trajectory
˙
X = −
)
Q
R
tanh
)
Q
R
(T − t)(X + η)+ξ. (8.159)
Now we replace the observation data Y in the control law (8.158)bythe
estimated state
#
X
u = −
)
Q
R
tanh
)
Q
R
(T − t)
#
X. (8.160)
The quantity
#
X is coupled to the observations Y via the law (8.113). In our
special case we have the corresponding evolution equation
˙
#
X = −gΘ
−1
#
X −
)
Q
R
tanh
)
Q
R
(T − t)
#
X + gΘ
−1
Y, (8.161)
where we have replaced u by the control law (8.160). The function g is the
solution of the Ricatti equation (8.104)
242 8 Filters and Predictors
˙g + Θ
−1
g
2
= Ω (8.162)
with the initial condition
5
g (0) = 0. Thus, we obtain the solution
g(t)=
√
ΘΩ tanh
)
Ω
Θ
t (8.163)
and the estimated state is then given by
˙
#
X = −
#
X
)
Ω
Θ
tanh
)
Ω
Θ
t −
)
Q
R
tanh
)
Q
R
(T − t)
#
X
+Y
)
Ω
Θ
tanh
)
Ω
Θ
t (8.164)
or with (8.157)
˙
#
X = −
#
X
)
Ω
Θ
tanh
)
Ω
Θ
t −
)
Q
R
tanh
)
Q
R
(T − t)
#
X
+(X + η)
)
Ω
Θ
tanh
)
Ω
Θ
t (8.165)
while the real state is given by
˙
X
∗
= −
)
Q
R
tanh
)
Q
R
(T − t)
#
X + ξ. (8.166)
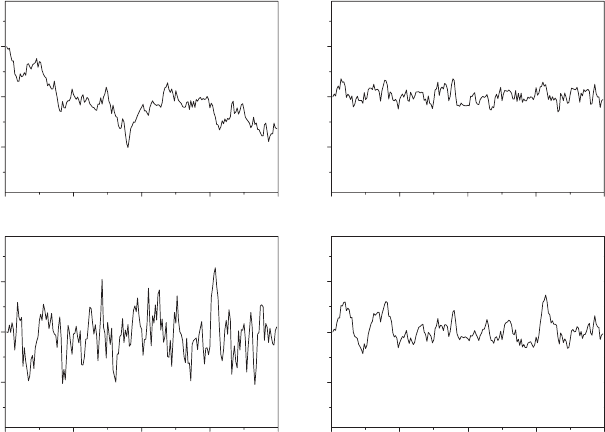
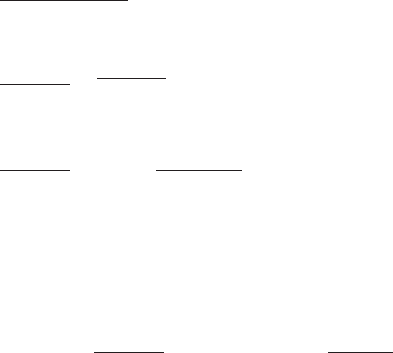
The different behavior of the three-control mechanism is presented in Figs. 8.2
and 8.3. We remark that all data presented here are generated with the same
sets of randomly distributed variables ξ and η. Thus, the uncontrolled mech-
anism corresponds to the standard Brownian motion. Of course, the best
control result occurs for the full information about the current state. This
case corresponds to the optimal feedback control. We get the standard feed-
back control law (8.153) and the trajectory is a random process described by
(8.156).
The second and third control regimes correspond to the situation that
the measurement process shows some uncertainties. In the second case, these
disturbances are not really considered, i.e., we assume that the variable Y (t)
is the real state. As a consequence, the system overreacts to the control and
the fluctuation of the particle around the origin increases in comparison to the
optimal feedback control. Much better as the second case is the third regime,
where the current state is estimated from the observation data via the Kalman
filter procedure. In fact, this control regime produces nearly the same results
as the optimal feedback control.
5
We assume that the particle was initially injected at the position X
0
=0without
any uncertainty.
8.6 Filters and Predictors 243
0 5 10 15 20
-2
-1
0
(a)
X(t)
0 5 10 15 20
-1
0
1
(c)
X(t)
time
0 5 10 15 20
-1
0
1
(b)
0 5 10 15 20
-1
0
1
(d)
time
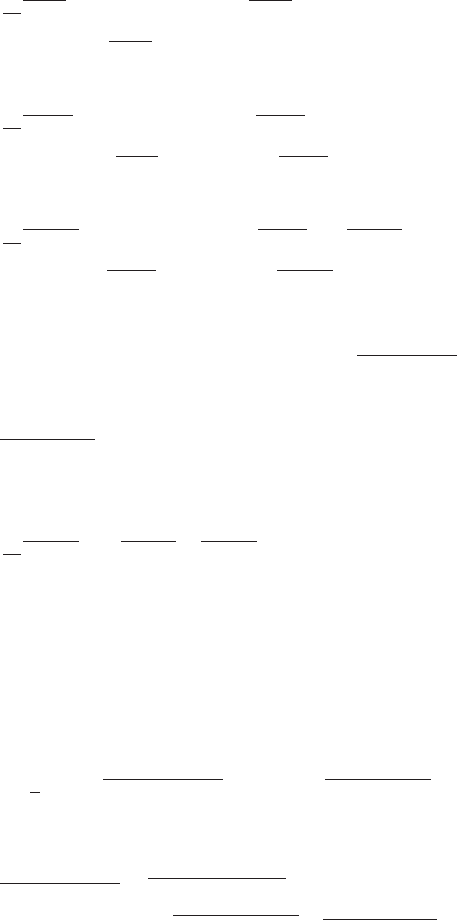
Fig. 8.2. The trajectory X for various control regimes corresponding to the same
sample of noise and the parameters Q =10,R =1,Ω =1,Θ =1,andT =20.
(a) Without control, i.e., u = 0. The behavior of X is a free diffusion. (b) Under
optimal control. The fluctuations of X are minimal compared with all other control
regimes. The behavior is similar to an Ornstein–Uhlenbeck process. (c)Withacon-
trol (8.158). The additional noise terms contained in the observations Y destabilize
the trajectory X in comparison to the optimal controlled system. (d) With Kalman
filter. The fluctuations of X are of the order of magnitude of the fluctuations of the
optimal case
8.6 Filters and Predictors
8.6.1 General Filter Concepts
Filters play a double role in the context of stochastic control mechanisms. The
first meaning is the preparation and transformation of disturbed observation
data into reasonable estimations
#
X describing the current state of the sys-
tem better than the pure observations. As we have seen above, the Kalman
filter is able to reduce essentially the influence of intrinsic noise effects which
inevitably occur during the measurement processes.
The second role is the application of the filtered data for the construction
of an appropriate control u = −K
#
X. The determination of the feedback K is a
standard procedure leading to the stochastic optimal feedback control (7.92).
244 8 Filters and Predictors
5101520
-8
-4
0
4
8
(d)
u(t)
5101520
-8
-4
0
4
8
(c)
u(t)
5101520
-8
-4
0
4
8
(b)
u(t)
time
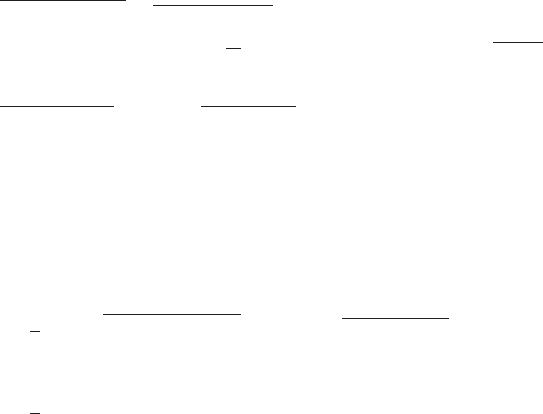
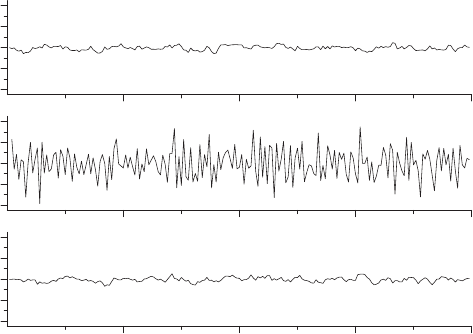
Fig. 8.3. The control function u for the three non-trivial control regimes (b-d)
presented in Fig. 8.2. The optimal control (b) and the control with Kalman filter (d)
are of the same order of magnitude while the control on the basis of the observations
(c) shows essential stronger fluctuations
This procedure depends not essentially on the filtering process. Also, in case
we are not able to solve the stochastic control equations, we can always find
by empirical methods a suitable matrix K defining the feedback.
Thus, the main problem of filtering is the selection and preparation of
available observations in order to compute a reasonable input
#
X for the con-
trol law. A filter is a special case of a larger class of estimation procedures
which may be characterized as the determination of an estimate
#
X(t)froma
given noise output observation Y (t
) with t
<τ. We speak about a filtering
problem, if τ = t, i.e., if the end of the observation record corresponds to
the current time. The problem is called a prediction problem if t>τ and a
smoothing problem if t<τ.
Smoothing problems are only of partial interest in the framework of con-
trol theory, whereas the solution of filtering and prediction problems is often
helpful for the determination of a powerful control.
8.6.2 Wiener Filters
For simplicity, we consider now time discrete processes with t
n
= nδt.A
generalization to time-continuous processes is always possible. The original
Wiener filtering process concerns the problem of linear causal estimation of
a process [92]. The observation data are again modeled as the sum of a de-
terministic term mapping the state vector X onto the observation vector Y
and an independent zero mean white noise. As for the Kalman filter, we are
8.6 Filters and Predictors 245
interested in the elimination of the error from the observations Y , i.e., we ask
for an optimal estimated state which may be used for a subsequent control of
the system. Furthermore, we assume that the system state X has the same
dimension N as the observation state Y . The statement that a causal estima-
tion is desired means that the estimated quantity at the current time depends
only on the past of the observation data. The linearity requires the ansatz
#
X
n
=
n
k=−∞
K
n−k
Y
k
=
∞
k=0
K
k
Y
n−k
. (8.167)
The filter coefficients K
k
are assumed to be such that the expression (8.167)is
convergent with respect to the mean square. The problem is now to determine
these coefficients. The appropriate criterion used for the Wiener filter is the
averaged orthogonality between the observed states Y
n
and the errors of the
estimation, X
n
−
#
X
n
, i.e.,
X
n
−
#
X
n
Y
k
=0 for k = −∞,...,n . (8.168)
Thus we obtain
X
n
Y
n−j
=
#
X
n
Y
n−j
for j =0,...,∞ (8.169)
and therefore with (8.167)
X
n
Y
n−j
=
∞
k=0
K
k
Y
n−k
Y
n−j
(8.170)
or
C
XY
(j)=
∞
k=0
K
k
C
YY
(j − k) (8.171)
with the correlation functions
C
XY
(j)=X
n
Y
n−j
and C
YY
(j)=Y
n
Y
n−j
. (8.172)
Both correlation functions are well defined for an arbitrary linear system fol-
lowing the dynamics given by (8.85) and (8.86). It is always possible to cal-
culate these matrices following the same procedure presented in Sect. 6.9.1.
From here, one obtains straightforwardly the wanted filter coefficients.
8.6.3 Estimation of the System Dynamics
The uncertainty of a system under control increases essentially if we have
no information about the true system dynamics, i.e., the evolution functions
F (X, u, t) or equivalent in case of a linear problem the matrices A(t)andB(t),
are unknown. The only information which is available is several observation
records.
In contrast to the above-discussed Wiener and Kalman filters, we must
now estimate also the system dynamics from the observation records. This
246 8 Filters and Predictors
means that we must solve a prediction problem because the knowledge of
the system dynamics is equivalent to the knowledge of the future evolution
and vice versa. Since we have no information about the real system dynamics
and we obtain also in future no more information as the continuation of the
observation records, it is no longer necessary to estimate the complete state
evolution of the system. The present situation allows us not to see more than
the observations, i.e., neither it can be proven a certain assumption about
the intrinsic dynamics nor this assumption can be disproved. From this point
of view, the treatment of such black box systems is an application of the
principle of Occam’s razor [47, 48]. This idea is attributed to the 14th-century
Franciscan monk William of Occam, which states that entities should not be
multiplied unnecessarily. The most useful statement of this principle is that
the better theory of two competing theories which make exactly the same
predictions is the simpler one. Occam’s razor is used to cut away unprovable
concepts.
In principle, each forecasting concept about the observations belonging to
a system with hidden intrinsic dynamics defines also a more or less suitable
model connecting the current and historical observations with an estimation
of the future evolution. In so far, this models represent a substitute system
from which we may obtain substitute evolution equations which are the neces-
sary constraints for a successful control. The uncertainties of such models are
considered in appropriable noise terms. Thus, if we have estimated the evolu-
tion of the underlying system, we come back to the classical stochastic control
problems. The system output, the observations, is automatically the input of
the control function while all functions defining the control law are obtainable
from the estimated evolution equations, i.e., the forecasting equations.
In the subsequent sections we will give some few ideas which may be helpful
for the characterization and application of several prediction methods. Since
these techniques do not belong to the central topics of the control theory, we
restrict our carrying out to a brief discussion of the main features.
8.6.4 Regression and Autoregression
For simplicity, we consider again time discrete processes. At the beginning
of the last century, standard predictions were undertaken by simply extrap-
olating a given time series through a global fit procedure. The principle is
very simple. Suppose we have a time series of observations {Y
1
,Y
2
,...,Y
L
}
with the corresponding points in time {t
1
,t
2
,...,t
L
} and Y
n
vectors of the
p-dimensional observation space. Then we can determine a regression function
f in such a way that the distance between the observations Y
n
and the cor-
responding values f (t
n
) becomes sufficiently small. There are two problems.
The first one is the choice of a suitable parametrized regression function. This
is usually an empirical step which depends often on the amount of experience.
The second problem is the definition of a suitable measure for the distance.