Сиротин С.С. Шахтные подъемные установки
Подождите немного. Документ загружается.

в режиме подъема груза
где k
Г
- коэффициент сопротивления движению груже-
ной ветви каната; в режиме спуска порожнего скипа
где k
П
- коэффициент сопротивления движению порож-
ней ветви каната.
Характер изменения кинематических и динамических па-
раметров рассматриваемой подъемной установки представлен
на диаграммах рис.33. Величину движущих усилий в харак-
терных точках диаграммы скорости при использовании вы-
ражений (282) и (282)` определяют в следующем порядке
при подъеме груза:
в начале и конце периода ускоренного движения при изме-
нении линейной скорости от нуля до максимального значения
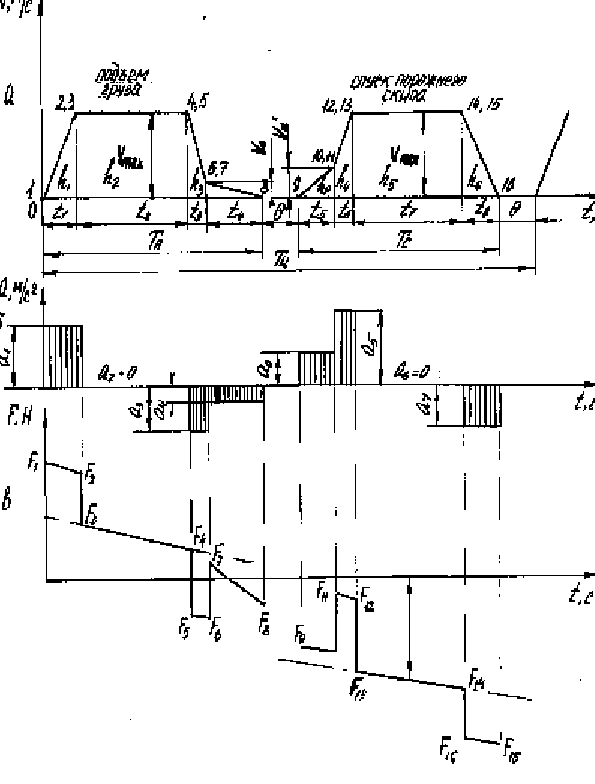
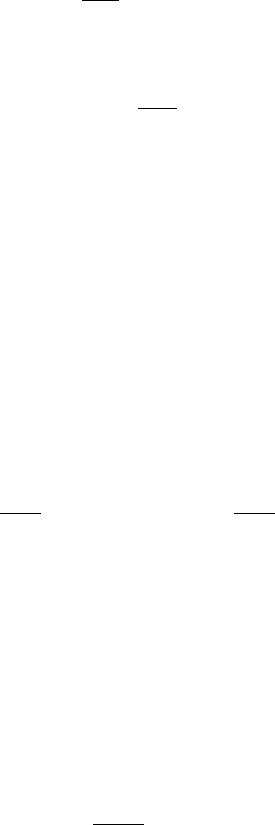
Диаграммы скиповой одноконцевой наклонной подъемной установки:
а - скорости; б - ускорения; в - движущих усилий.
Рис. 33
Основное уравнение динамики скиповой одноконцевой
наклонной подъемной установки, базируясь на выводе ранее
полученной формулы (280), может быть представлено в виде:
(282)
( )
( )
[ ]
( )
( )
( )
F g
km m ml
f m m mfl
m
l f
l l f
ma
Г Г
Г
c kп n
c k п n
k
п n n
i1 1 2
2
1 0 1 2 1
1
1 1 1
=
+ + +
+ + + +
+
+ ++
+ + +
+
− − −
∑
sin
cos
sin cos ...
sin cos
,
α
α
α α
α α
( )
( )
[ ]
( ) ( )
[ ]
( )
( )
( )
F g
k m m m l x
f m m mf l x
m
l f
l l f
ma
Г Г
Г
c c k п n
c k п n
k
п n n
i=
− + + − +
+ + + − +
+
+ ++
+ + +
±
− − −
∑
β α
α
α α
α α
sin
cos
sin cos ...
sin cos
,1 2
2
1 0 1 2 1
1 1 1
( ) ( )
[ ]
( )
[ ]
( )
( )
( )
( )
Fg
k m m mlx
mf mflx
m
lx f
l x f
ma
П Г c k
c k
k
п n n n
i=
− − − + +
+ + + −
−
+ − −−
− + −
±
− −
∑
1 0 1
1 2 0 1
1 1 2 2 2
21 1
sin
cos
sin cos ...
sin cos
,
α
α
α α
α α
(282)`
99
98
в начале и конце периода равномерного движения
в начале и конце периода замедленного движения при
изменении линейной скорости от максимального значения
до V
0
в начале и конце периода замедленного движения гру-
женого окипа в разгрузочных кривых
при спуске порожнего скипа:
в начале и конце периода ускоренного движения порож-
него скипа в разгрузочных кривых
в начале и конце периода ускоренного движения при
изменении линейной скорости от V
0
` до V
max
в начале и конце периода равномерного движения с мак-
симальной линейной скоростью
( )
[ ]
( ) ( )
[ ]
( )
( )
( )
F g
km m m l h
f m m mf l h
m
l f
l l f
ma
Г Г
Г
c k п n
c k п n
k
п n n
i2
1
1 2 1
2
1 0 1 2 1
1
1 1 1
=
+ + − +
+ + + − +
+
+ ++
+ + +
+
− − −
∑
sin
cos
sin cos ...
sin cos
;
α
α
α α
α α
( )
[ ]
( ) ( )
[ ]
( )
( )
( )
F g
km m mlh
fm m mf l h
m
l f
l l f
Г Г
Г
c k п n
c k п n
k
п n n
3
1
1 2 1
2
1 0 1 2 1
1 1 1
=
+ + − +
+ + + − +
+
+ ++
+ + +
− − −
sin
cos
sin cos ...
sin cos
,
α
α
α α
α α
(
)
[
]
( ) ( )
[ ]
F g
km m mlhh
fm m mf l h h
Г Г
Г
c k p
c k p
4
0 3 1
1 2 0 3 1
=
+ + + + +
+ + + + +
sin
cos
;
α
α
(
)
[
]
( ) ( )
[ ]
F g
km m m l h h
f m m mf l h h
ma
Г Г
Г
c k p
c k p
i5
0 3 1
1 2 0 3 1
3=
+ + + + +
+ + + + +
−
∑
sin
cos
,
α
α
(
)
[
]
( ) ( )
[ ]
F g
km m mlh
fm m mf l h
ma
Г Г
Г
c k p
c k p
i6
0 1
1 2 0 1
3=
+ + + +
+ + + +
−
∑
sin
cos
;
α
α
(
)
[
]
( ) ( )
[ ]
F g
km m mlh
fm m mflh
ma
Г Г
Г
c k p
c k p
i7
0 1
1 2 0 1
4=
+ + + +
+ + + +
−
∑
sin
cos
,
α
α
(
)
[
]
( )
[ ]
F g
k m m ml
fm m mfl
ma
Г
Г
с Г c k
c k
i8
0 1
1 2 0 1
4=
− + + +
+ + +
−
∑
β α
α
sin
cos
;
(
)
[
]
[ ]
( )
F g
k m m ml
mf mfl
m ma
П c k
c k
i
Г
Г9
0 1
1 20 1
0
1
=
− − − +
+ +
+ −
∑
sin
cos
,
α
α
(
)
(
)
[
]
( )
[ ]
( )
F g
k m m mlh
mf mf l h
m m a
П c k p
c k p
i Г
Г
10
0 1
1 2 0 1
0
1
=
− − − + +
+ + +
+
+ −
∑
sin
cos
;
α
α
(
)
(
)
[
]
( )
[ ]
( )
F g
k m m mlh
mf mf l h
m ma
П c k p
c k p
i
Г
Г
11
0 1
1 2 0 1
5
1
=
− − − + +
+ + +
+
+ −
∑
sin
cos
,
α
α
(
)
(
)
[
]
( )
[ ]
( )
F g
k m m mlhh
mf mf l h h
m ma
П c k p
c k p
i
Г
Г
12
0 4 1
1 2 0 4 1
5
1
=
− − − + + +
+ + + +
+
+ −
∑
sin
cos
;
α
α
(
)
(
)
[
]
( )
[ ]
F g
k m m mlhh
mf mf l h h
П c k p
c k p
Г
13
0 4 1
1 2 0 4 1
1
=
− − − + + +
+ + + +
sin
cos
,
α
α
101
100
в начале и конце периода замедленного движения при
изменении линейной скорости от максимального значения до
нуля
Анализ диаграммы движущих усилий,представленной
на рис.33, позволяет сделать следующие выводы:
при подъеме расчетного груза приводной двигатель ра-
ботает в двигательной режиме, преодолевая статичеcкие со-
противления подъемной системы и обеспечивая при этом дей-
ствительную динейную скорость при соответствующих зна-
чениях ускорений и замедлений, принятых в соответствии с
требованиями норм Правил безопасности или технических воз-
можностей подъемной машины;
если в период основного замедления или в период дви-
жения груженого скипа в разгрузочных кривых движущие
усилия отрицательны, последнее свидетельствует о необходи-
мости применения тормоза ( механическое или электрическое
воздействие на процесс изменения кинематических и динами-
ческих параметров подъемной системы);
в случае, если массы опускаемого порожнего скипа дос-
таточно для преодоления инерционных сопротивлений в на-
чале подъемного цикла, т.е.
машина начнет медленно разворачиваться без участия
двигателя вначале с ускорением a
0
, затем a
1
. По достижению
максимальной скорости двигатель может подключаться к сети
переменного тока и переводиться в генераторный режим ра-
боты со скоростью V=(1,1-1,15) V
max
. С наступлением периода
замедления двигатель переводится в режим динамического
торможения, а затем производится стопорение машины рабо-
чим тормозом. Спуск порожнего скипа может осуществляться
с начала и до конца этого периода в режиме динамического
торможения;
в случае, если
приводной двигатель подключается к сети переменного
тока и развивает движущее усилие
После разгона до мексимальной скорости, что соответ-
ствует условию
привод переводится или в генераторный, или режим ди-
намического торможения. В конце периода при стопорении
машины накладывают рабочий тормоз.
Теоретический и практический интерес несомненно
представляет и анализ режимов работы широко используемых
в подземных условиях одноконцевых наклонных грузовых,
оборудованных вагонетками с глухим кузовом, и людских,
снабженных специально оборудованными вагонетками,
подъемных установок, где применяют трехпериодную трапе-
цеидальную диаграмму скорости.
В соответствии со схемой, представленной на рис.8 , и
( ) ( )
[ ]
( )
[ ]
( )
( )
( )
F g
k m m mlh
mf mf l h m
l f
l l f
П c k п n
c k п n k
п n n
Г
14
6
1 2 6
2
1 0 1 2 1
1
1 1 1
=
− − − − +
+ + − − ×
×
− −
−− + −
− − −
sin
cos
sin cos
... sin cos
;
α
α
α α
α α
( ) ( )
[ ]
( )
[ ]
( )
( )
( )
( )
F g
k m m ml h
mfmflh m
l f
ll f
mma
П c kп n
c k п n k
п n n
i Г
Г
15
6
1 2 6
2
1 0 1 2 1
7
1
1 1 1
=
− − − − +
+ + − − ×
×
− −
−− + −
− −
− − −
∑
sin
cos
sin cos
... sin cos
,
α
α
α α
α α
( )
[ ]
[ ]
( )
( )
( )
( )
F g
k m m ml
mf mfl m
l f
ll f
mma
П c kп n
c k п n k
п n n
i Г
Г
16 1 2
2
1 0 1 2 1
7
1
1 1 1
=
− − − +
+ + − ×
×
− −
−− + −
− −
− − −
∑
sin
cos
sin cos
... sin cos
.
α
α
α α
α α
(
)
F m m аст i Г> −
∑
,
(
)
F m m аст i Г< −
∑
,
(
)
F m m а Fдв i Г ст= − −
∑
.
(
)
F m m аст i Г> −
∑
,
103
102
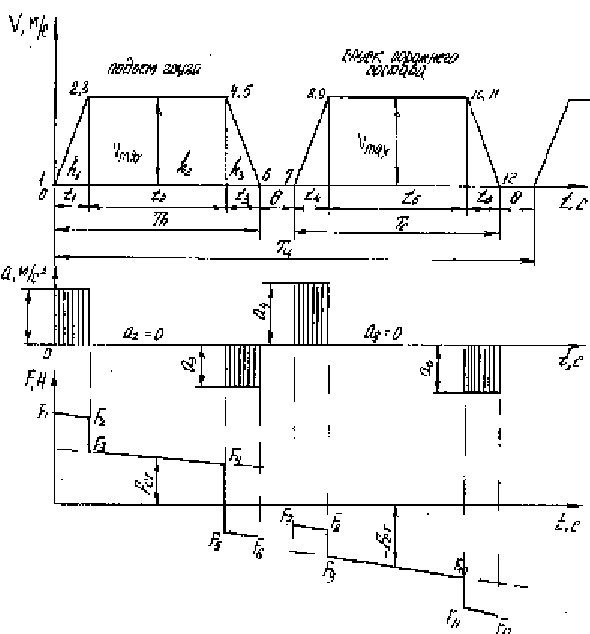
выражениями (282), (282)` выполнен анализ закономерностей
изменения кинематических и динамических параметров этих
систем за время подъемного цикла. Результаты такого анали-
за представлены на рис. 34. Величину движущих усилий в ха-
рактерных точках трехпериодной трапецеидальной диаг-
раммы скорости при использовании выражений (282) и (282)`
определяют следующим образом:
при подъеме груза:
в начале и конце периода разгона при изменении ли-
нейной скорости от нуля до V
max
в начале и конце периода равномерного движения с мак-
симальной линейной скоростью
в начале и конце периода движения при изменении мак-
симальной линейной скорости от V
max
до нуля
( )
[ ]
( )
[ ]
( )
( )
( )
F g
zkm m ml
zfm m mfl
m
l f
l l f
ma
Г Г
Г
c kп n
c k п n
k
п n n
i1 1 2
2
1 0 1 2 1
1
1 1 1
=
+ + +
+ + + +
+
+ +
++ + +
+
− − −
∑
sin
cos
sin cos
... sin cos
,
α
α
α α
α α
( ) ( )
[ ]
( ) ( )
[ ]
( )
( )
( )
F g
zkm m mlh
zfm m mflh
m
l f
ll f
ma
Г Г
Г
c k п n
c k п n
k
п n n
i2
1
1 2 1
2
1 0 1 2 1
1
1 1 1
=
+ + − +
+ + + − +
+
+ +
++ + +
+
− − −
∑
sin
cos
sin cos
... sin cos
;
α
α
α α
α α
( ) ( )
[ ]
(
)
( )
( )
( )
( )
F g
zkm m mlh
zfm m
mflh
m
l f
ll f
ГГ
Г
c kп n
c
k п
n k
п n n
3
1
1
2 1
2
10 1 2 1
1 1 1
=
+ + − +
+ +
+ −
×
× +
+ +
++ + +
− − −
sin
cos
sin cos
... sin cos
,
α
α
α α
α α
(
)
(
)
[
]
( ) ( )
[ ]
F g
zkm m mhl
zfm m mf h l
Г Г
Г
c k
c k
4
3 0 1
1 2 3 0 1
=
+ + + +
+ + + +
sin
cos
;
α
α
Диаграммы грузовой одноконцевой наклонной подъемной установки,
оборудованной вагонетками с глухим кузовом:
а - скорости; б - ускорением; в - движущих усилий.
Рис. 34|
(
)
(
)
[
]
( ) ( )
[ ]
F g
zkm m mhl
zfm m mf h l
ma
Г Г
Г
c k
c k
i5
3 0 1
1 2 3 0 1
3=
+ + + +
+ + + +
−
∑
sin
cos
;
α
α
(284)
105
104
(284)
где сопротивление движению одного подъемно-
го сосуда и его ветви каната, Н.
Динамический момент вращающихся частей подъемной
системы
где I
п.k
, I
o.k
, и I
бар.
- моменты инерции находящихся на
органе навивки витвей каната соответственно поднимаемой
и опускаемой витков и самого органа навивки, кг. м
2
;
I
ред.
и I
рот.
- моменты инерции редуктора и ротора при-
водного двигателя, кг. м
2
.
Моменты инерции отдельных элементов подъемной си-
стемы определяют:
канатов, заполнивших цилиндричеокие поверхности
органа навивки,
находящихся на коничеокой части органа навивки,
органа навивки I
бар.
- по данным завода изготовителя;
ротора приводного двигателя -
где h
k.ц.
и h
k.r.
- длина подъемного каната, размещенного
соответственно на цилиндрической и конической частях орга-
на навивки, м, R
б.ц.
и R
м.ц.
- радиусы органа навивки соответ-
ственно большого и малого цилиндров; (GD
2
)
рот.
-маховый мо-
мент ротора приводного двигателя, Н. м
2
; i -передаточное чис-
ло редуктора.
Динамический момент поступательно движущихся эле-
ментов подъемной системы с линейным ускорением a:
поднимаемой
и опускаемой ветвей канатов
g
k
mГ
−
1
2
(
)
Mдинв пk ok ба ед от. р. . . р. р . р . ,= + + + +I I I I I ε (285)
Iц k ц
ц
mhR=
2
,
(286)
Ikr k kr
бц мц
mh
R R
.. ..
.. ..
;=
+
2
(287)
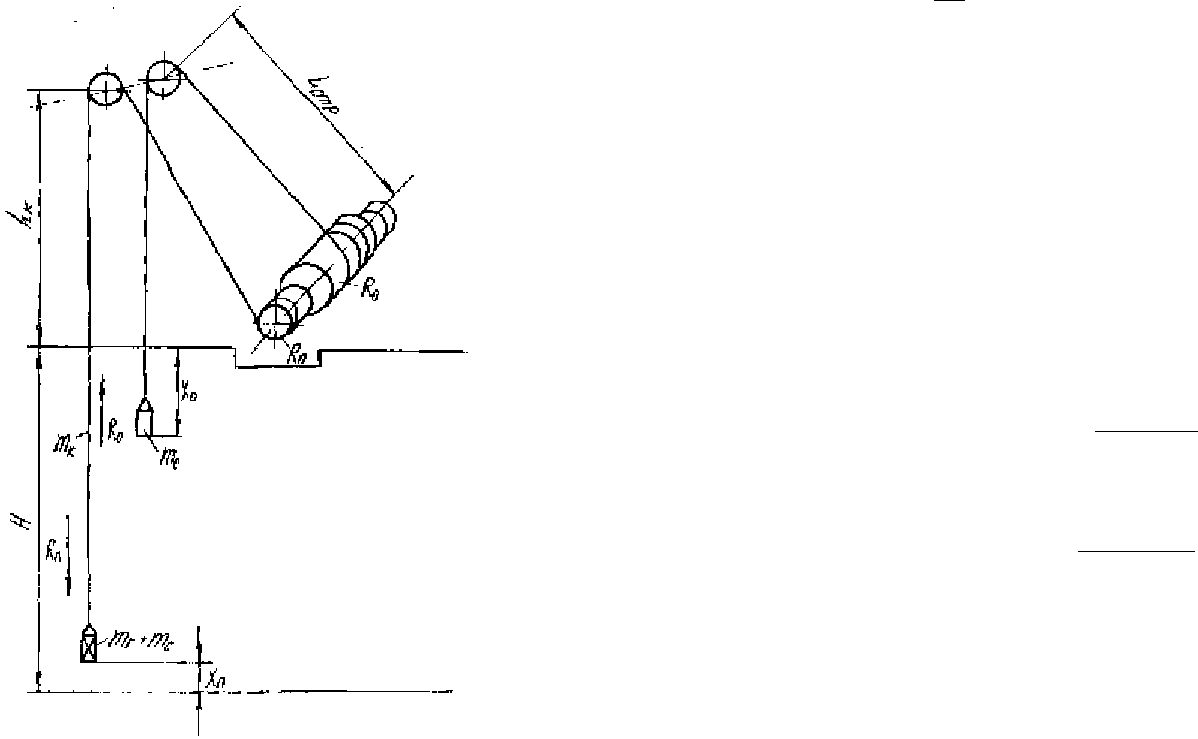
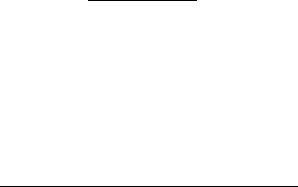
Схема росположения подъемной машины, оборудованной БЦК
барабаном, относительно ствола шахты ( к выводу динамического
уравнения для подъемных систем с переменным радиусом органа
навивки):
Н - высота падъема, м; h
k
- высота копра, м; L
стр
- длина струн
каната, м; Xп и X
0
- путь, пройденный соответсвенно поднимаемой
и опускаемой ветвью каната, м; Rп и R
0
- радиусы органа навивки
соответсвенно поднимаемой и опускаемой ветвей каната, м.
Рис. 35
(
)
Iр .
р .
,от
отGD i
g
=
2 2
4
(288)
(
)
[
]
M m mX h L m aRдинов c k k ст нш... р. . . ,= + + + +0 0 0
(290)
( )
M
m m m
HhL X m
aRдинпв
c k
k ст п нш
п п
Г
...
р. ..
.=
+ + ×
× + + − +
(289)
109
108
где m
н.ш
- приведенная к радиусу направляющего шкива
его собственная масса, кг; а
п
и а
0
- линейное ускорение соответ-
ственно поднимаемой и опускаемой ветвей каната, м/с
2
.
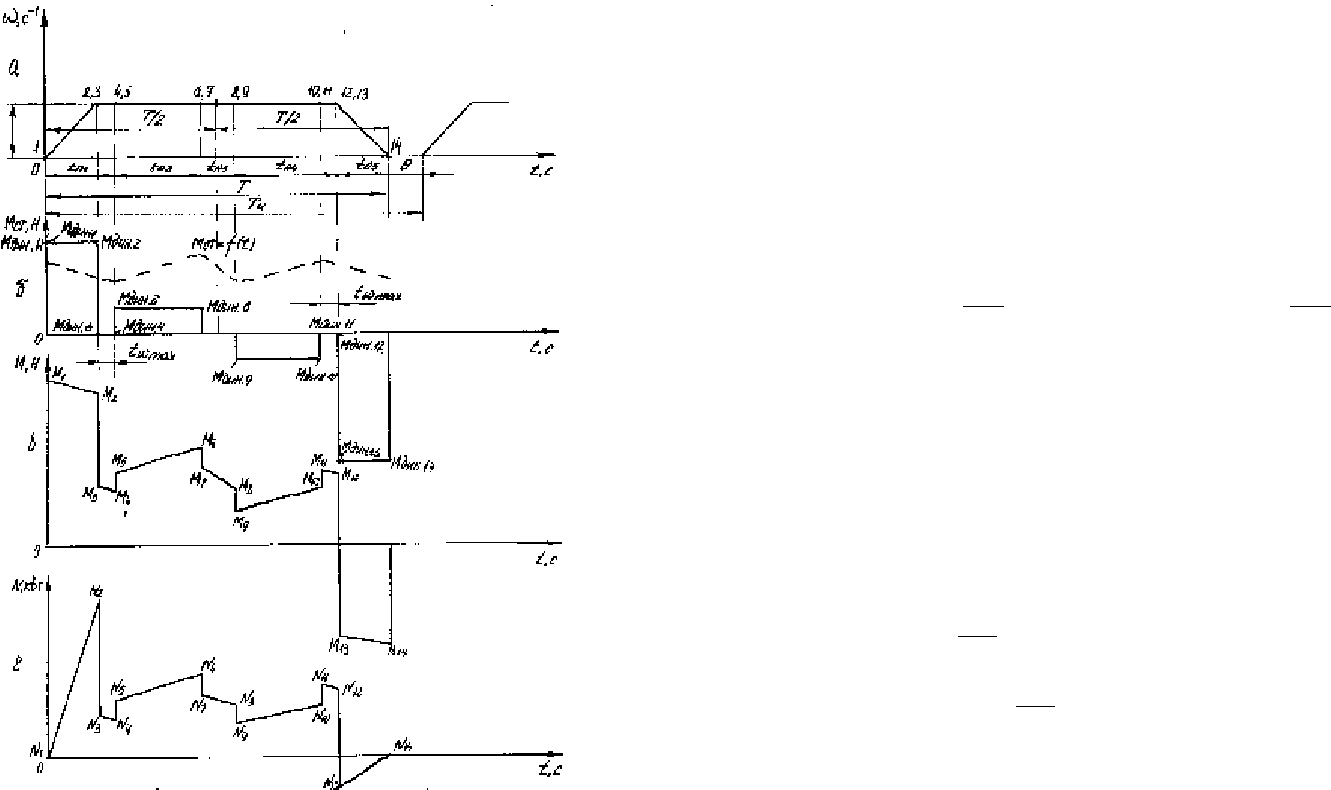
Диаграммы подъемной системы с бицилиндроконичес-
ким барабаном представлены на рис.36. Порядок расчета и
выбора кинематических параметров подъемных систем с пе-
ременным радиусом органа навивки дан в п.10.
Величины статических и динамических моментов для ха-
рактерных точек диаграммы скорости определяют, используя
выражения (284) - (290), в следующей последовательности (см.
рис.24 и 36):
в начале подъемного цикла
в конце периода пуска при изменении угловой скорости
от нуля до ω
max
Диаграммы подъемной системы с
бицилилиндроконическим барабаном:
а- угловой скорости органа навивки, сек
-1
; б - статического и
динамического моментов, Н.м; в - движущего момента, Н.м;
г - мощности на валу подъемной машины, кВт.
Рис.36
M g
k
m m mHR m
k
mRст c k мц c бцГ Г1
1
2
1
2
=
+
+ +
− −
−
. . ,
(
)
Mдинв nk ok ба ед от. р. . . р. р . р ,1 1 1 1= + + + +I I I I I ε
(
)
[
]
M m m m H h L m aRдинпв c k k ст нш п мцГ.. р. . .,1 1= + + + + +
(
)
[
]
M m m h L m aRдинов c k k ст нш бц.. р. . .,1 01= + + +
M М М Мдин динв динпв динов. . р. .. .. ;1 1 1 1
=
+
+
( )
( )
M g
k
m m mHh V t R
m
k
m mhV t R
ст
c k п мц мц
c k бц
Г
Г
2
1
01
1
2
1
2
=
+
+ + +
−
− −
−
+ −
− . max .
max max .
,
ω
ω
(
)
Mдинв nk ok ба ед от. р. . . р. р . р ,2 2 2 1= + + + +I I I I I ε
( )
M
m m m
HhL hV t m
aRдинпв
c k
k ст п мц нш
п мц
Г
..
р. . max .
. ,2
1
1=
+ + ×
× + + − + +
ω
(
)
[
]
M m m h L h V t m aRдинов c k k ст мц нш бц.. р. . max . . ,2 01 01= + + − + +ω
M М М Мдин динв динпв динов. . р. .. .. ;2 2 2 2
=
+
+
111
110

в начале и конце периода равномерного движения с мак-
симальной угловой скоростью ω
max
до момента перехода гру-
женого сосуда с малого цилиндра на конический срез
в начале и конце периода движения подъемных сосудов
с максимальной угловой скоростью при переходе каната гру-
женой ветви с малого на большой цилиндр
в начале и конце периода равномерного движения
подъемных сосудов, когда груженая и порожняя ветви пере-
мещаются на радиусе большого цилиндра
в начале и конце периода вращения барабана с макси-
мальной угловой скоростью ω
max
, когда поднимаемая ветвь
каната, навиваясь на большой цилиндр продолжает двигать-
ся с равномерной линейной скоростью, а опускаемая, свива-
ясь с конического среза, движется с замедлением а
02
в начале и конце периода равномерного движения с мак-
симальной угловой скоростью ω
max
до момента начала перио-
да основного замедления
M Мст ст3 2
=
,
Mдинв. р ,3 0
=
Mдинпв.. ,3 0
=
Mдинов.. ,3 0
=
M дин3 0
=
;
( )
M g
k
m m mH h R
m
k
m mh R
ст
c k п мц
c k бц
Г
Г
4
1
01
1
2
1
2
=
+
+ + −
−
− −
−
+
.
.
,
Mдинв. р ,4 0
=
Mдинпв.. ,4 0
=
Mдинов.. ,4 0
=
M дин4 0
=
;
М Мст ст5 4
=
,
М динв. р ,5 0
=
(
)
[
]
M m m m H h L h m aRдинпв c k k ст n нш п мцГ.. р. . .,5 1 2= + + + + − +
( )
( )
M g
k
m m m Hhh R
m
k
m mh h R
ст
c k п n бц
c k бц
Г
Г
6
1 2
01 02
1
2
1
2
=
+
+ + −
−
− −
−
+ +
− .
.
;
М динв. р ,6 0
=
( )
M
m m m
HhL h h m
aRдинпв
c k
k ст n n нш
п бц
Г
..
р. .
.,6
1 2
2=
+ + ×
× + + − − +
Мдинов.. ,6 0
=
М Мдин динпв6 6
=
.. ;
М Мст ст7 6
=
,
М динв. р ,7 0
=
М динпв.. ,7 0
=
М динов.. ,7 0
=
М дин. ;7 0
=
( )
( )
M g
k
m m m Hh h h R
m
k
m mh h h R
ст
c k п n n бц
c k бц
Г
Г
8
1 2 3
01 02 03
1
2
1
2
=
+
+ + − − −
−
− −
−
+ + +
.
.
,
Мдинв. р ,8 0
=
М динпв.. ,8 0
=
М динов.. ,8 0
=
М дин. ;8 0
=
М Мст ст. .,9 8
=
М динв. р. ,9 0
=
М динпв... ,9 0
=
(
)
[
]
M m mh h h h L m aRдинов c k k ст нш бц.. р. . .,9 01 02 03 02= + + + + + +
М Мдин динов. ...;9 9
=
( )
( )
M g
k
m m mHh h h h R
m
k
m mh h h h R
ст
c k п n n n бц
c k мц
Г
Г
10
1 2 3 4
01 02 03 04
1
2
1
2
=
+
+ + − − − −
−
− −
−
+ + + +
.
.
,
М динв. р. ;10 0
=
М динпв... ;10 0
=
(
)
[
]
M m mh h h h hL m aRдинов c k k ст нш мц.. р. . .,10 01 02 03 04 02= + + + + + + +
М Мдин динов. ...;10 10
=
М Мст ст11 10
=
; М динв. р. ;11 0
=
М динпв... ,11 0
=
М динов.. ,5 0
=
М Мдин динпв5 5
=
.. ;
113
112
в начале и конце периода замедленного движения при
изменении угловой скорости от ω
max
до нуля
Суммируя ординаты зависимостей М
ст
=f(t) и, М
дин
=f(t)
при соответствующих значениях t , строят диаграмму движу-
щих моментов М=f(t). Диаграмму N=f(t) строят, используя
выражение (272).
При органах навивки постоянного радиуса в клетевом
подъеме для нагрузочных диаграмм с точки зрения динамики
характерны три периода диаграммы скорости. Для подъем-
ных систем с переменным радиусом органа навивки для тех
же условий (рис. 36) характерны пять периодов:
t
n1
=t
01
; t
n2
=t
02
; t
n3
=t
03
; t
n4
=t
04
; и t
n5
=t
05
.
Анализ диаграмм, представленных на рис.36 и рис.24,
позволяет сделать следующие выводы о характере изменения
кинематических и динамических параметров в каждом из пяти
периодов подъемного цикла:
в первом периоде при изменении угловой скорости от
нуля до ω
max
, что соответствует (средней величине углового ус-
корения ε
1
, поднимаемая ветвь перемещается с ускорением
a
n1
=ε
1
R
м.ц.
, опускаемая - a
01
=ε
1
R
б.ц.
. Здесь все движущиеся эле-
менты создают положительную динамическую нагрузку на
двигатель. Отрезок времени t
ωmax
, принадлежащий первому пе-
риоду, характеризуется отсутствием и углового, и линейного
ускорений, что обуславливает наличие в системе подъема дей-
ствия чисто статической нагрузки;
во втором периоде бицилиндроконический барабан вра-
щается c максимальной угловой скоростью, поднимаемая ветвь
каната, навиваяеь на конический срез, движется с линейным
ускорением a
n2
. Здесь динамическая нагрузка создается, толь-
ко поднимаемой ветвью каната, остальные элементы подъем-
ной установки обуславливают действие статической нагрузки;
третий период характеризуется полным отсутствием дей-
ствия динамической нагрузки. Здесь БЦК барабан вращается
с максимальной угловой скоростью, поднимаемая и опускае-
мая ветви каната, перемещаясь на радиусе большого цилинд-
ра, движутся с равномерной линейной скоростью; в четвер-
том периоде орган навивки вращается с максимальной угло-
вой скоростью, поднимаемая ветвь каната продолжает дви-
гаться с максимальной линейной скоростью, а опускаемая
ветвь, перемещаясь на коническом срезе, движется с замедлен
нием a
02
. Здесь отрицательная динамическая нагрузка созда-
ется только опускаемой ветвью;
промежуток времени t
ωmax
принадлежащий пятому пери-
оду, характеризуется отсутствием и углового и линейного ус-
корений, что обуславливает действие в подъемной системе
чисто статической нагрузки. На последнем этапе пятого пе-
риода, при изменении угловой скорости от ω
max
до нуля, бици-
линдроконический барабан вращается с угловым замедлени-
ем ε
3
, поднимаемая ветвь каната движется с линейным замед-
лением a
n3
=ε
3
R
б.ц.
а опускаемая a
03
=ε
3
R
м.ц.
. В этот период созда-
М динов... ,11 0
=
М дин . ;11 0
=
( )
( )
M g
k
m m m
Hh h h h V t
R
m
k
mm
h h h hV t
R
ст
c k
п n n n
бц
c k
мц
Г
Г
12
1 2 3 4
01 02 03 04
1
2
1
2
=
+
+ + ×
× − − − − −
−
−
−
−
+ ×
× + + + +
max max
.
max max
.
,
ω
ω
Мдинв. р. ,12 0
=
М динпв... ,12 0
=
М динов... ,12 0
=
М дин. ;12 0
=
М Мст ст. . ,12 13
=
(
)
Mдинв nk ok ба ед от. р. . . р. р . р ,13 13 13 3= + + + +I I I I I ε
( )
M
m m m
h L h V t m
aRдинпв
c k
k ст n нш
п бц
Г
..
р. max max .
. ,13
5
3=
+ + ×
× + + − +
ω
(
)
[
]
M m mHhV t hL m aRдинов c k мц k ст нш мц.. .. max р. . . ,13 05 03= + − + + + +ω
M М М Мдин динв динпв динов. . р. .. .. ,13 13 13 13
=
+
+
M g
k
m mR m
k
m mHRст c бц c k мцГ Г14
1
2
1
2
=
+
+
− −
−
+
. . ,
(
)
Mдинв nk ok ба ед от. р. . . р. р . р . ,14 14 14 3= + + + +I I I I I ε
(
)
[
]
M m m mh L m aRдинпв c k k ст нш п мцГ.. р. . .,14 3= + + + +
(
)
[
]
M m mH h L m aRдинов c k k ст нш мц.. р. . .,14 03= + + + +
M М М Мдин динв динпв динов. . р. .. .. ,14 14 14 14
=
+
+
− =N
M
кВтx
x x
ω
1000
, .
115
114
ется отрицательная динамическая нагрузка всеми движущи-
мися элементами подъемной системы. Для подъемных систем
с переменным радиусом органа навивки, оборудованных обык-
новенными скипами, применяют пяти - или шестипериодные
диаграммы скорости, опрокидными сосудами - семипериодные.
12. Расчет и выбор величин ускорений и замедлений для разных
систем подъема
При расчете кинематики необходимо знать истинное
значение величин ускорений и замедлений. А в п.10 при изло-
жении вопросов, связанных с расчетом кинематических пара-
метров подъемных систем, ничего не было сказано о методике
их определения, так как для этого необходимо было владеть
умением составить соответствующее рассматриваемой подъем-
ной системе основное уравнение движения, что было, по по-
нятным причинам, подробно изложено только в предыдущей
главе. Очевидно, при расчете и выборе конкретной подъем-
ной установки после определения приведенной массы ее по-
ступательно движущихся и вращающихся частей, следует рас-
считать фактические значения величин ускорений и замедле-
ний, скорректировав их в соответствии с требованиями Пра-
вил безопасности по методике, изложенной в рассматривае-
мом разделе, и только затем выполнять расчет и выбор ос-
тальных кинематических параметров.
Величины ускорений и замедлений выбирают исходя из
следующих соображений.
Величину ускорения в период пуска приводного двига-
теля подъемной установки определяют из условия максималь-
ного использования его перегрузочной сноеобности.
Для условий эксплуатации вертикальных подъемников,
оборудованных обыкновенными клетями, пусковое усилие на
радиусе органа навивки в начале подъемного цикла опреде-
ляют в соответствии с диаграммами, представленными на
рис.26, из выражения
Усилие,развиваемое приводным двигателем в период
пуска может быть определено из условия максимального ис-
пользо вания его перегрузочной способности, т.е.
Коэффициент перегрузки приводного двигателя в пред-
варительных расчетах следует принимать в среднем для асин-
хронных двигателей λ
пуск
=0,6λ
н
для двигателей постоянного
тока λ
пуск
=0,7λ
н
.
Номинальное усилие на радиусе органа навивки, раз-
виваемое приводным двигателем
где Р
н
- номинальная мощность приводного двигателя, кВт;
η
ред.
- к.п.д. редуктора; V
max
- максимальная действительная ско-
рость движения подъемных сосудов, м/с.
Решая совместно (291) и (292),определяют фактическую
величину ускорения в период пуска приводного двигателя
В конце подъемного цикла при изменении скорости дви-
жения подъемных сосудов от максимального значения до нуля
в зависимости от знака движущего усилия различают следую-
щие виды замедления: двигательное при F
дв
>0 , тормозное -
F
дв
< 0, под действием сил инерции - F
дв
=0.
Замедление подъемной системы нод действием сил инер-
ции называют режимом свободного выбега. Он протекает без
затрат энергии и поэтому экономически наиболее выгоден. В
связи с невозможностью абсолютно точной дозировки загруз-
ки подъемных сосудов, в чистом виде режим свободного выбе-
га осуществить практически не представляется возможным.
Поэтому режим свободного выбега используется только в на-
чальный период, а затем двигатель подключается к сети и подъем-
ный цикл завершается в двигательном режиме (F
дв
> 0) или в тор-
мозном режиме, если в конце режима свободного выбега на-
кладывают тормоз ( F
дв
<0).
При трехпериодной трапецеидальной диаграмме скоро-
сти величину движущего усилия в конце подъемного цикла
определяют из выражения
Решая уравнение (295) относительно a
3
для различных
режимов работы подъема, определяют величину замедления:
двигательное замедление ( F
6
=F
дв
>0)
(
)
[
]
F F gkm m mH maпуск k k iГ= = − − +
∑
1 1` .
(291)
F
P
V
н
н ед
=
1000
η
р
max
,
(293)
(
)
[
]
F gkm m m H maГ k k i6 3= + − −
∑
` .
(295)
F Fпуск н пуск
=
λ
.
(292)
(
)
[
]
a
F gkm m mH
m
пуск н k k
i
Г
1=
− − −
∑
λ `
.
(294)
117
116