Соловьев А.С., Алексеев В.В. Электропривод с векторным управлением. Руководство к проектированию
Подождите немного. Документ загружается.

21
а) от перегрузки и КЗ (I
ус
= (1,3 ÷ 1,4)I
ном
);
б) от длительной работы с током близким к максимально допустимому в режиме
постоянства мощности;
в) нулевая защита от включения напряжения при нулевых сигналах задания;
г) от обрыва цепей возбуждения двигателей постоянного тока.
14. Условия эксплуатации должны соответствовать климатическим зонам У и
ХЛ, по категории помещений 2 и 1.
15. Требования по надежности:
Средняя
наработка на отказ не менее 4500 час.
2. Обоснование выбора типа привода
Электрические приводы вращателей станков шарошечного бурения с нерегули-
руемым асинхронным приводом не удовлетворяют требованиям, приведенным в пре-
дыдущем пункте. Эти приводы не позволяют менять скорость при изменении условий
бурения, при забуривании, для устранения вибраций, возникающих при работе станка.
Эти требования определяют необходимость применения регулируемых приводов.
Пришедшие на замену асинхронным приводы, выполненные
по системе Г-Д обладают
существенным недостатком
− наличие дополнительных вращающихся элементов и как
следствие более низкую надежность привода в целом.
В настоящее время разработана система электропривода, позволяющая удовле-
творить требованиям, предъявляемым к приводу, и избежать основного недостатка
приводов по системе Г-Д. Такой системой является система ПЧ-АД (частотный преоб-
разователь
− асинхронный двигатель).
3. Расчет мощности и выбор двигателя привода вращателя
Разрушение породы при шарошечном бурении происходит путем внедрения ша-
рошки в породу и скола породы при вращении шарошки по забою скважины.
22
Внедрение на высоту h
ст
происходит в результате усилия подачи N
под
,, однако,
для станков СБШ, применяемых на открытых работах, усилие подачи с достаточной
точностью может быть определено по эмпирической формуле [1]:
6,0(N
под
=
÷
3
доппр
10Df)7,0 ⋅⋅⋅ , где
f
пр
− коэффициент крепости по шкале Протодьяконова,
D
доп
− диаметр долота в см.
Глубина внедрения зубьев шарошки в породу:
h
ст
=
долшарск
бур
nZk
V
⋅⋅
, где
k
ск
= 0,5 коэффициент уменьшения скорости бурения из-за неполного скалыва-
ния породы между зубьями;
Z
шар
= 3 число шарошек в долоте;
N
дол
− частота вращения долота.
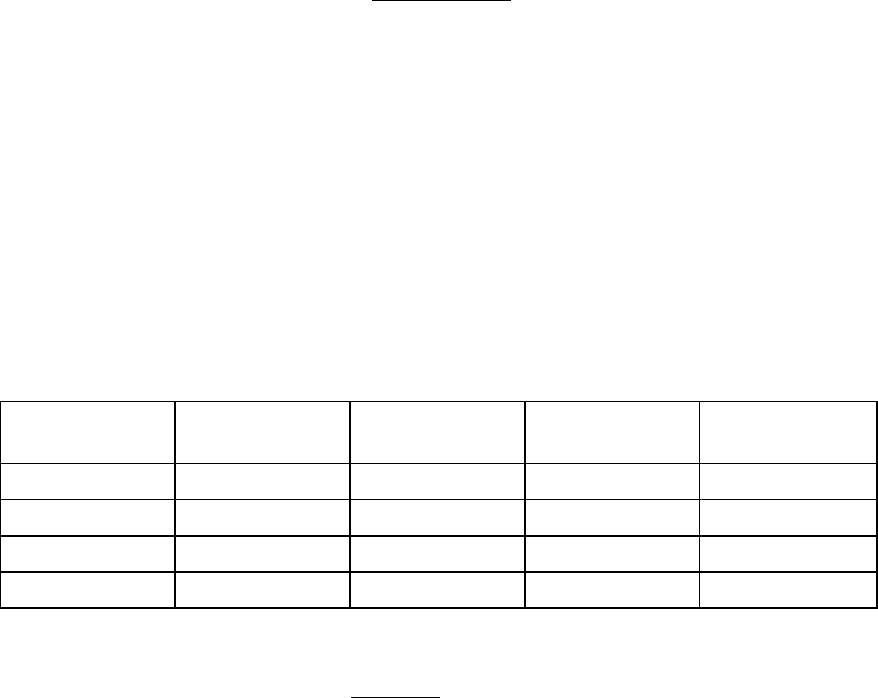
Таблица 1
Величины скорости бурения
∅ долота,
см
f
пр
n
дол
,
об/мин.
N
под
,
кН
V
бур
,
см/мин
25 6-10 81 180-200 25
25 10-12 81 200-300 20
25 12-14 81 180-200 16
25 14-16 81 260-300 11
Полное сопротивление, преодолеваемое механизмом
N
шар
=
4
шарбур
допст
10Z
2
Dh
−
⋅⋅σ⋅
⋅
Эпюра усилий, преодолеваемых шарошкой на забой, имеет форму треугольника.
Поэтому для определения вращающего момента долота силу N
шар
рассматривают вло-
женной на расстояние 2/3 · (D
дол
/ 2) от оси вращения долота. Тогда момент, необходи-
мый для вращения бурового става долота:

23
Μ
шар
=
2
тр
долшар
10k
3
DN
−
⋅⋅
⋅
, где
k
тр
= 1,12.
Мощность двигателя для привода вращателя:
Р =
3
мех
буршар
10
M
−
⋅
η
ω
⋅
, где
ω
бур
− угловая скорость вращения долота;
η
мех
− КПД механизма вращателя.
На основании выбора компоновочной схемы механизма вращателя при переда-
точном числе редуктора i
ред
= 11,05 и данных из таблицы
n
дв
= n
доп
· i
ред
По данным формулам выбираем двигатель.
Исходя из данных: D
доп
= 25; Z
шар
= 3; η
мех
= 0,65.
Крепости пород f
пр
= 15÷16
А также по справочным данным Н.Н. Чулкова и данных таблицы:
σ
бур
= 162 МПа
n
доп
= 81 об/мин.
V
бур
= 11 см/мин.
Находим усилие подачи:
N
под
= 0,7 ⋅ f
пр
⋅ D
дол
· 10
3
= 0,7 · 16 · 25 · 10
3
= 28 · 10
3
, Н
Глубина внедрения зубьев шарошки в породу:
h
ст
=
долшарск
бур
nZk
V
⋅⋅
=
8135,0
11
⋅⋅
=0,09 см
Сопротивление, преодолеваемое механизмом вращателя:
N
шар
=
4
шарбур
допст
10Z
2
Dh
−
⋅⋅σ⋅
⋅
=
46
10310162
2
2509,0
−
⋅⋅⋅⋅
⋅
= 55 кН
Тогда момент, необходимый для вращения бурового става долота:

24
Μ
шар
=
2
тр
долшар
10k
3
DN
−
⋅⋅
⋅
=
2
3
1012,1
3
251055
−
⋅⋅
⋅⋅
= 5133 Н⋅м,
Принимаю ПВ = 0,9
Мощность двигателя вращателя:
=⋅⋅
η
ω
⋅
=
−
ПВ10
М
Р
3
мех
буршар
шар
9,010
65,0
48,85133
3
⋅⋅
⋅
−
= 60,3 кВт
Частота вращения двигателя:
n
дв
= n
доп
· i
ред
= 81 ⋅ 11,05 = 895 об/мин
Согласно расчетным данным принимаем для привода вращателя ближайший по
мощности и минимальной частоте вращения асинхронный двигатель единой серии 4А
типа 4А280S6У3 со следующими основными данными:
Р
н
=75 (кВт)
J
р
=2,9 (кг⋅м
2
)
N
н
=985 (об/мин) (I
пуск
/I
ном
)=7,0
сos
ϕ=0.89
(М
пуск
/М
ном
)=1,2
η=92 (%)
(М
min
/М
ном
)=1,0
I
c
=139 (А) (М
мах
/М
ном
)=2,2
4. Математическая модель асинхронного двигателя
Для построения переходных процессов необходима математическая модель, для
этого используем соответствующие уравнения Горева–Парка и движения привода [2, 3]:
dt
d
Ψ
oα
= U
sr
- I
sα
R
s
- L
s
σ
s
dt
dI
S
α
dt
d
Ψ
oβ
= U
sβ
- I
sβ
R
s
- L
s
σ
s
dt
dI
S
β
dt
d
Ψ
rα
= P
o
ωΨ
rβ
- I
rα
R
r
25
dt
d
Ψ
rβ
= P
o
ωΨ
rα
- I
rβ
R
r
dt
d
ω =
J
pL
m
2
3
0
(I
rα
I
sβ
- I
rβ
I
sα
) - M
c
J
-1
Остальные величины вычисляются по формулам:
I
sα
=
σ
S
L
1
(
Ψ
sα
- K
r
Ψ
rα
) =
σ
S
L
1
Ψ
sα
-
σ
Sr
m
LL
L
Ψ
rα
I
sβ
=
σ
S
L
1
(
Ψ
sβ
- K
r
Ψ
rβ
) =
σ
S
L
1
Ψ
sβ
-
σ
Sr
m
LL
L
Ψ
rβ
I
sα
=
σ
r
L
1
(
Ψ
rα
- K
s
Ψ
sα
) =
σ
r
L
1
Ψ
rα
-
σ
rS
m
LL
L
Ψ
sα
I
rβ
=
σ
r
L
1
(
Ψ
rβ
- K
s
Ψ
sβ
) =
σ
r
L
1
Ψ
rβ
-
σ
rS
m
LL
L
Ψ
sβ
5. Функциональная схема электропривода с векторным управлением
Наиболее радикальным направлением совершенствования привода, в том числе
не только вращателя бурового станка, но и механизма подачи является применение
векторных систем управления приводами с асинхронным двигателем. В векторной сис-
теме составляющие тока статора (i
1
,i
2
) двигателя, ориентированные по вектору пото-
косцепления, определяют соответственно величину модуля потокосцепления и момента
двигателя. Система обладает высокими динамическими показателями и придает двига-
телю переменного тока свойства, аналогичные свойствам привода постоянного тока в
переходных и установившихся режимах, и позволяет в полной мере использовать пре-
имущества асинхронного двигателя.
Рациональная с точки зрения
технической реализации, система векторного
26
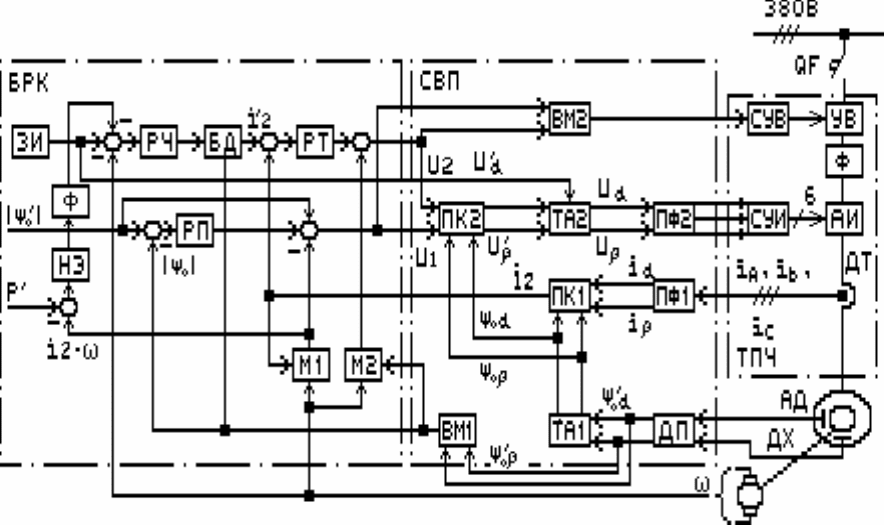
управления, представленная на рис. 1, имеет в качестве опорного вектор главного
потокосцепления, что обеспечивает и лучшие энергетические показатели [1].
Рис. 1. Функциональная схема привода станка с векторным управлением
В качестве датчиков составляющих вектора главного потокосцепления
Ψ
α
Ψ
β
используются датчики Холла (ДХ). Система строится по принципу подчиненного регу-
лирования. Блок регулирования и компенсации (БРК) содержит канал управления мо-
дулем главного потокосцепления |
Ψ| и канал управления скоростью (ω). Канал управ-
ления скоростью является двухконтурным и содержит внутренний контур регулирова-
ния составляющей тока i
2
, определяющей момент двигателя. Для получения автоном-
ности управления потокосцеплением и моментом с помощью множительных ячеек (М
1
и М
2
) осуществляется компенсация перекрестных влияний переменных состояний. С
целью обеспечения независимости динамических свойств системы от уровня модуля
главного потокосцепления канал управления частотой вращения может содержать блок
деления (БД).
Составляющая компенсирующего воздействия, представляющая собой произве-
дение проекции тока i
2
на скорость n (i
2
.
n), используется для реализации контура регу-
27
лирования в режиме постоянства мощности. Контур содержит устройство сравнения и
нелинейный элемент (НЭ) в виде однополупериодного выпрямителя. При превышении
заданного уровня мощности P' на выходе нелинейного элемента выделяется сигнал на
снижение скорости. Привод переходит в режим работы с постоянной мощностью. Та-
кой контур обеспечивает выход станка из режима колебаний, сопровождающегося зна-
чительным
ростом расходуемой мощности и устраняемого незначительным изменени-
ем скорости.
В связи с организацией управления с помощью переменных машины, ориенти-
рованных по вектору главного потокосцепления, система векторного управления со-
держит, помимо традиционных блоков, блоки к которым предъявляются специальные
требования. Так, датчик потока (ДП), используя информацию с датчиков Холла (ДХ),
должен формировать
сигналы, пропорциональные составляющим вектора главного по-
токосцепления машины Ф
d
, Ф
q
, блок управления инвертором СУИ - широкие управ-
ляющие импульсы из входной трехфазной системы переменных сигналов U
a
, U
b
, U
c
.
Кроме традиционных блоков (регуляторов), система векторного управления со-
держит специальные блоки, входящие в состав системы векторных преобразований
(СВП).
Блоки преобразователей координат (ПК1, ПК2), преобразователей фаз (ПФ1,
ПФ2), вычислителей модуля (ВМ1, ВМ2) являются типовыми функциональными эле-
ментами. Блоки ПК1, ПК2 реализуют матрицу поворота векторов. ПК2 преобразует со-
ставляющие сигнала в осях
1,2, жестко связанных с главным потокосцеплением маши-
ны, в систему неподвижных осей (d,q), а преобразователь ПК1 осуществляет обратное
преобразование. Блоки преобразователей фаз (Пф1, ПФ2) предназначены для преобра-
зования трехфазных напряжений в эквивалентные им двухфазные и обратно. Блоки
ВМ1, ВМ2 выделяют модуль двухфазной системы входных напряжений. Блоки триго-
нометрических анализаторов (ТА1, ТА2), являющиеся
наиболее сложными, выделяют
28
из двухфазной системы напряжений Ф
'
q
, Ф
'
d
нормированные по амплитуде основные
гармоники этих напряжений Ф
q
, Ф
d
(Sin(Ф), Cos(Ф)) (высшие гармоники фильтруются).
Блок является следящей системой. Он состоит из тригонометрического сравнивающего
устройства (ТСУ) и двухфазного генератора синусоидального напряжения (ГСН). На
входах ТСУ сравнивается фаза сигналов ГСН и входных сигналов ТА. На выходе ТСУ
выделяется сигнал пропорциональный разности (ошибке) фаз, воздействующий на ре-
гулятор ТСУ с целью синхронизации
входных и выходных синалов.
Все блоки СВУ реализуются на операционных решающих усилителях (ОУ) и
множительных ячейках. Эти элементы могут быть созданы на базе интегральных мик-
росхем широкого применения: интегральных усилителях К153, К140 и перемножителях
К525.
6. Структурная схема системы векторного управления
При исследовании систем векторного управления асинхронным короткозамкну-
тым двигателем со стабилизацией амплитудного поля в зазоре машины применяется
упрощенная система дифференциальных уравнений (во вращающихся координатах),
описывающих процессы в машине, питаемой от идеализированного преобразователя
частоты [4]:
rs
rsm
s
rs
ss
rrs
Rs
kk
kkiL
U
KK
KK
Ф
LKK
rK
Ф
dt
d
−
−
−
+
−
−
+
−
−
−=
1
)1)(1(
1
)1(
)1(
)1(
20
100
ω
ρ
srs
s
srssrs
Rrs
Lkk
Ф
U
Lkk
i
Lkk
kkr
i
dt
d
)1()1(
1
)1(
0
222
−
−
−
+
−
+
−=
ωρ
c
M
J
iф
J
p
dt
d 1
2
3
2
0
0
−×=
ω
,
где:
K
s
= L
m
/L
s
– коэффициент потокосцепления статора;
29
K
r
= L
m
/L
r
– коэффициент потокосцепления ротора;
r
s
, r
R
– активное сопротивление статора и ротора;
L
s
, L
r
– индуктивность ротора и статора;
L
m
– взаимная индуктивность м/у обмотки статора и ротора;
p
o
– число пар полюсов;
ω – частота вращения ротора машины;
⎪Φ⎪ – модуль главного потокосцепления;
U
s1
, U
s2
– составляющие напряжения статора во вращающейся системе коорди-
нат, жестко связанной с главным потокосцеплением;
i
2
– составляющая обобщенного вектора тока статора на ординату вращающейся
системы координат;
M
c
– момент сопротивления;
J – динамический момент инерции.
Из этой системы исключены нелинейные члены, имеющие малый «удельный
вес», содержащие произведения переменных (трансформаторные ЭДС на индуктивно-
стях рассеяния) и принято сопротивление ротора r
R
=const.
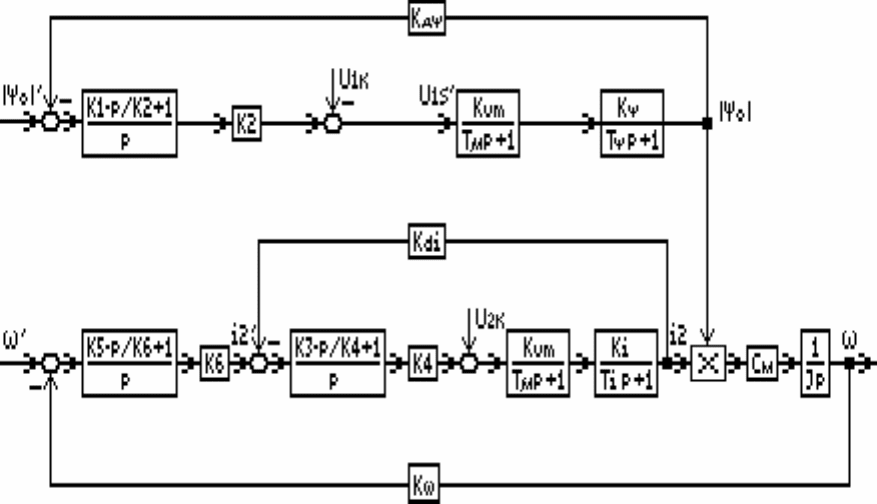
Структурная схема системы, при условии интерпретации преобразователя час-
тоты в виде апериодического звена с постоянной времени Т
м
, представлена на рис. 2.
Рис. 2. Структурная схема системы векторного управления
Поскольку вектором выходных переменных являются (
⎪Φ⎪, i
2
, ω), то можно
30
применить классическую теорию подчиненного регулирования, разработанную для
электроприводов постоянного тока.
В теории применяется компенсация нелинейных мешающих влияний, а также
компенсация полюсов нулями передаточной функции.
Компенсирующие составляющие напряжений:
U
s1k
= - p
o
.
ω
.
L
s
(1-k
s
k
r
)i
2
;
U
s2k
= p
o
.
ω
.
⎪Φ
o
⎪
приняты введенными точно, и поэтому в системе не фигурируют, так же как и
связи, влиянием которых можно пренебречь.
Вычисление составляющей p
o
.
ω
.
L
s
(1-k
s
k
r
)
.
i
2
=k
.
i
2
.
ω может быть использовано для
реализации регулирования с поддержанием постоянства мощности (i
2
.
ω=const).
Схема содержит канал управления (стабилизации) модулей главного потокосце-
пления
⎪Φ⎪ и канал управления скоростью вращения ротора ω. Канал скорости - двух-
контурный и включает подчиненный контур регулирования тока i2.
Параметры структурной схемы:
T
ф
=
R
r
s
rs
r
L
k
kk
×
−
−
1
1
, [c];
T
i
=
Rs
rrs
rk
Lkk
+
−
1
)1(
, [c]
K
ф
=
R
r
s
rs
r
L
k
kk
×
−
−
1
)1(
, [c]
C
м
=
2
3
P
o
k
i
=
Rrs
rkr +
1
, [см];
Т
μ
= 0,001...0,0033 с. (Преобразователь с квазисинусоидальным напряжением).