Виноградов А.Б. Векторное управление электроприводами переменного тока
Подождите немного. Документ загружается.

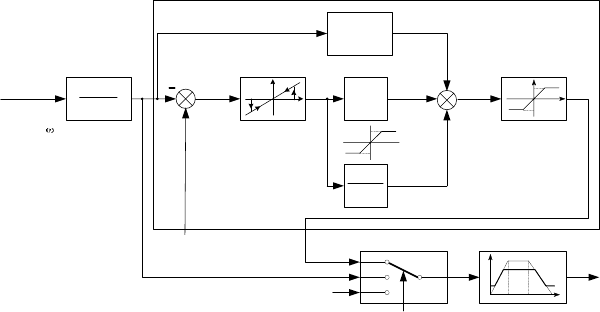
чатель режима устанавливает один из трех режимов работы блока. При
среднем положении переключателя режимов на выход блока поступает
сигнал задания скорости электропривода с аналогового входа, при
верхнем положении – сигнал с выхода технологического регулятора,
при нижнем положении – цифровое задание скорости. При верхнем
положении переключателя аналоговый вход блока используется для
ввода в
систему управления сигнала с датчика обратной связи по тех-
нологической переменной.
1
1
+pT
фв
Аналоговый
вход
Задание
r
/ сигнал
технологического
датчика
Фильтр
входного
сигнала
Зона
нечувствительности
Цифровое задание
технологического
регулятора
Цифровое
задание
скорости
max
min
max
min
Тех. рег.
Аналог.
Выбор
режима
Задатчик
интенсивности
Технологический регулятор
PK
дтр
тр
K
PT
тр
1
Ω
ном
t
T
азгонар
T
то можр .
Ω
rz
ω
Рис.10.8. Функциональная схема блока ввода и предварительной обработки
сигналов
Фильтр входного сигнала, выполненный в виде апериодического
звена 1-го порядка с постоянной времени
, осуществляет низко-
частотную фильтрацию помех в сигнале, поступающем на аналоговый
вход системы управления.
фв
T
Технологический регулятор реализован в виде пропорционально-
интегрально-дифференцирующего (ПИД) звена, дополнительно снаб-
женного элементами ограничения и «зоной нечувствительности». С
помощью коэффициентов пропорциональной
, интегральной
и дифференциальной составляющих технологического
регулятора осуществляется настройка системы управления электро-
приводом, замкнутой по технологической переменной, на параметры
объекта регулирования. Элемент «зона нечувствительности» исполь-
зуется при работе с ПИ-структурой регулятора
)(
ТР
K
)(
ТР
T )(
ДТР
K
)0(
=
ДТР
K для кор-
ректировки режима работы устройства таким образом, чтобы электро-
привод не реагировал на малые изменения сигнала рассогласования
181
между заданным и реальным значениями технологической перемен-
ной.
Задатчик интенсивности формирует динамические характеристи-
ки электропривода по каналу управления, задавая время разгона
и время торможения . )(
разг
T )(
торм
T
В модели системы «преобразователь частоты – асинхронный
двигатель» вычисляются вектор ЭДС двигателя и проекции вектора
тока статора в ортогональной системе координат, ориентированной по
вектору ЭДС.
В области малых частот справедливы следующие соотношения
между параметрами Т- образной схемы замещения АД:
msrsrsss
LRRLL
ω
ω
ω
σσ
,,, << , где
s
ω
– частота вращения поля отно-
сительно статора.
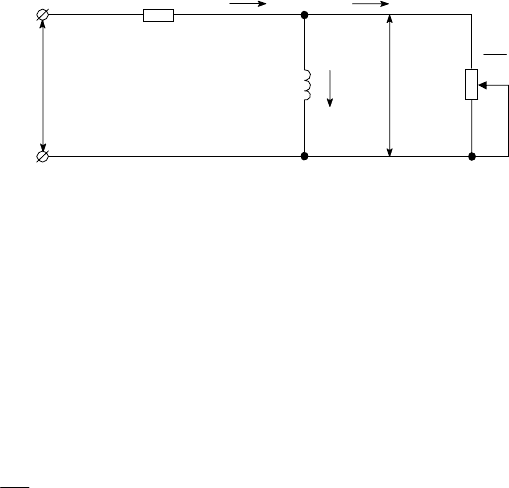
Это позволяет пренебречь индуктивностями рассеяния статора и
ротора, присутствующими в традиционных математических моделях
АД, в частности, перейти от традиционной Т- образной схемы замеще-
ния фазы двигателя к упрощенной Т- образной схеме замещения
(рис.10.9).
s
U
r
E
r
m
L
s
I
r
s
R
r
I
r
m
I
r
s
R
r
Рис.10.9. Упрощенная схема замещения АД
В данной математической модели отсутствует разделение между
ЭДС и потокосцеплениями статора, ротора и намагничивания:
.
;
EEEE
rms
rms
rrrr
r
r
r
r
===
Ψ=Ψ=Ψ=Ψ
(10.14)
Модель описывается следующей системой уравнений:
;
;
EIRU
III
sss
mrs
rrr
r
r
r
+=
+=
;
r
r
I
s
R
E
r
v
=
(10.15)
182
,
s
rs
s
ω
ω
ω
−
=
где
r
ω
– электрическая частота вращения ротора.
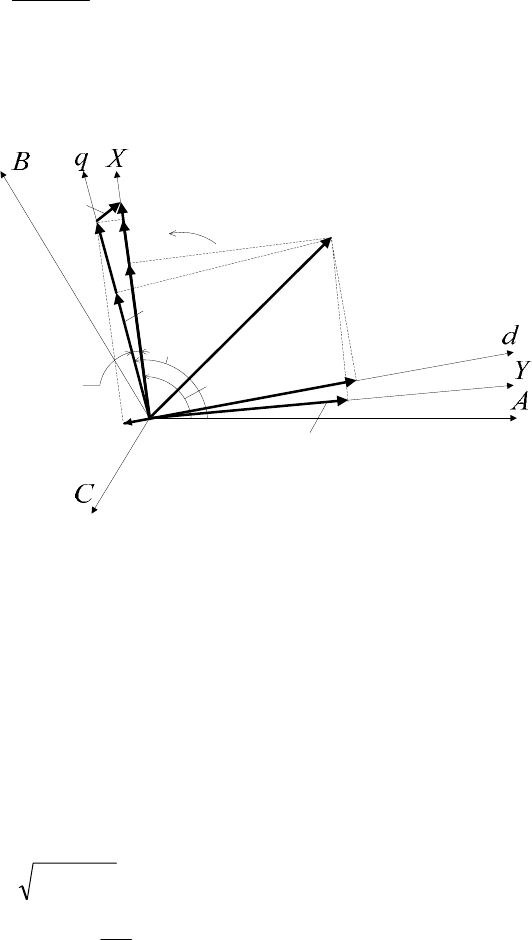
Схеме замещения на рис.10.9 и уравнениям (10.15) соответствует
векторная диаграмма на рис.10.10.
x
I
r
y
I
r
rq
II
r
r
=
md
II
r
r
=
s
I
r
y
E
r
x
E
r
E
r
s
U
r
s
s
IR
r
s
ω
e
α
u
α
eu
α
0
Рис.10.10. Векторная диаграмма АД
В ортогональной системе координат
, ориентированной по
вектору ЭДС, первое уравнение из (10.15) распадается на два скаляр-
ных уравнения:
),( qd
,;
rqmd
IIII
=
=
где – проекции век-
тора тока статора в системе координат
(d,q) .
qd
II ,
Систему векторных уравнений (10.15) заменим скалярными урав-
нениями, записанными в системе координат , ориентированной
по вектору
.
),( yx
s
U
r
;
;
ysy
xssx
IRE
IRUE
−=
−=
;
22
yx
EEE +=
;
y
x
eu
E
E
arcctg=
α
(10.16)
183
,
S
R
IE
r
r
=
где
– проекции вектора тока статора и ЭДС в системе
координат
;
yxyx
EEII ,,,
),( yx
eu
α
– угловое положение вектора ЭДС относи-
тельно вектора напряжения.
Систему уравнений (10.16) дополним выражениями для потокос-
цепления и электромагнитного момента:
.
2
3
2
3
;
rmmprp
mm
IILZIZM
IL
=Ψ=
=Ψ
(10.17)
Полная система уравнений модели ПЧ-АД с учетом координатных
преобразований вектора тока статора в системе координат
(x,y) и в
системе координат
(d,q), примет вид
;
3
2
22
BABAs
IIIII ++=
;)cos()
3
cos(
3
2
;)sin()
3
sin(
3
2
⎥
⎦
⎤
⎢
⎣
⎡
++=
⎥
⎦
⎤
⎢
⎣
⎡
++=
uBuAy
uBuAx
III
III
α
π
α
α
π
α
;
;
ysy
xssx
IRE
IRUE
−=
−=
;
22
yx
EEE +=
;
y
x
ue
E
E
arcctg+=
αα
.)cos()
3
cos(
3
2
;)sin()
3
sin(
3
2
⎥
⎦
⎤
⎢
⎣
⎡
++=
⎥
⎦
⎤
⎢
⎣
⎡
++=
eBeAm
eBeAr
III
III
α
π
α
α
π
α
(10.18)
Напряжение статора вычисляется из заданного значения
с
учетом напряжения на входе инвертора
:
sz
U
d
U
184

sz
б
d
d
s
U
U
U
U =
,
где
– базовое значение напряжения на входе инвертора, при кото-
ром реальное выходное напряжение преобразователя равно заданному.
б
d
U
Применение упрощенной модели двигателя существенно снижает
объем вычислений, уменьшает список параметров, необходимых для
реализации алгоритма управления, за счет исключения из этого списка
индуктивностей рассеяния статора и ротора. При этом обеспечивается
желаемая точность вычисления переменных, в
том числе на малых
частотах вращения. Ошибка в отработке задания по частоте на боль-
ших и средних частотах, возникающая вследствие применения упро-
щенной модели АД, не превышает 2–3 %, что вполне приемлемо для
класса бездатчиковых электроприводов.
В результате реализации принципа ориентации осуществляется
разложение вектора тока статора на активную составляющую, пропор-
циональную электромагнитному моменту
, и на реактивную состав-
ляющую, пропорциональную потокосцеплению двигателя. Первая со-
ставляющая равна току ротора
, вторая – току цепи намагничива-
ния
.
r
I
m
I
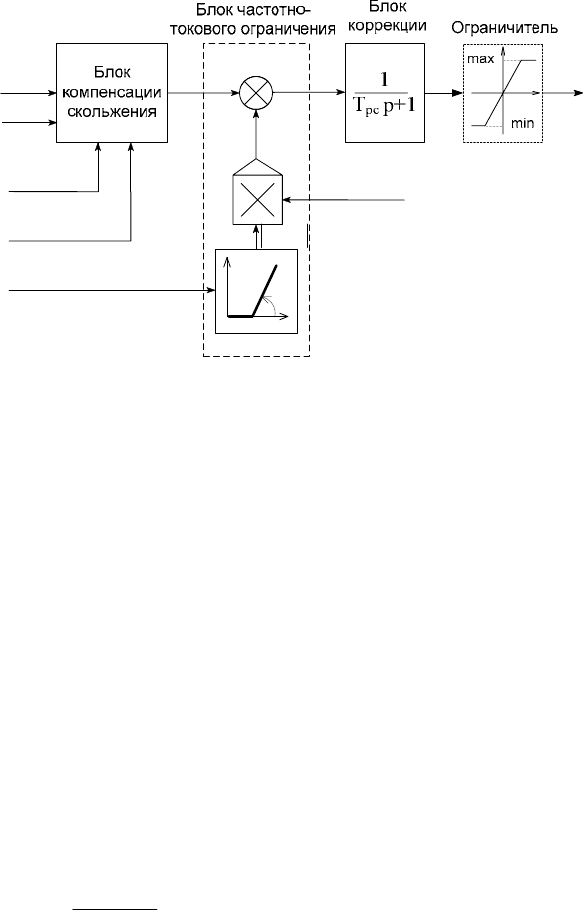
Формирователь частоты (рис.10.11) осуществляет вычисление
заданного значения частоты напряжения статора
. Он включает
в себя блок компенсации скольжения, блок частотно-токового ограни-
чения, блок коррекции и ограничитель выходного сигнала.
)(
sz
ω
Блок компенсации скольжения формирует на своем выходе про-
межуточный сигнал задания по частоте
, учитывающий наличие
скольжения. Из упрощенной схемы замещения имеем
1s
ω
,
s
R
IE
r
r
= где
s
rs
s
ω
ω
ω
−
= – относительное скольжение.
Выразим частоту поля:
.;
rr
r
ssrrrs
IRE
E
IREE
−
==−
ω
ωωωω
С учетом этого уравнения блока компенсации скольжения записы-
ваются в виде
⎪
⎩
⎪
⎨
⎧
<
≥
−
=
,,
;,
min
min
1
ωωω
ωω
ω
ω
szrz
sz
rr
rz
s
если
если
IRE
E
(10.19)
185
где
– задание по электрической частоте вращения ротора.
rz
ω
rz
ω
r
I
E
s
I
1s
ω
что
ω
)(Sign
что
ω
что
ω
2s
ω
3s
ω
sz
ω
min
ω<ω
sz
что
ω
что
K
что
I
s
I
Рис.10.11. Функциональная схема формирователя частоты
Уравнение (10.19) позволяет осуществлять функцию компенсации
скольжения во всех четырех квадрантах механической характеристики
электропривода. При переходе электропривода в генераторный режим
работы изменяется знак тока
r
I . При изменении направления враще-
ния изменяется знак сигнала задания по частоте
. Необходимость
изменения структуры блока компенсации скольжения на малых часто-
тах связана с ограниченным частотным диапазоном ориентации по
ЭДС (вектор ЭДС обращается в ноль при нулевой частоте вращения
поля).
rz
ω
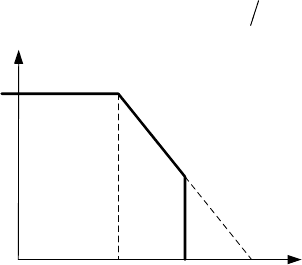
Блок частотно-токового ограничения осуществляет формирова-
ние механической характеристики привода в области больших (пре-
вышающих номинальные) нагрузок (наклонный участок характери-
стики рис.10.12).
Блок работает в соответствии со следующими уравнениями:
;||)(
;
12
чточточто
чтоss
Sign
ωωω
ωωω
=
+=
⎪
⎩
⎪
⎨
⎧
≥
−
<
=
;,
,,0
||
чтоsчтоном
что
чтоs
чтоs
что
IIеслиK
I
II
IIесли
ω
ω
(10.20)
186
⎩
⎨
⎧
≠+
=−
=
,)()(,1
,)()(,1
)(
1
1
rs
rs
что
ISignSignесли
ISignSignесли
Sign
ω
ω
ω
где
)(|,|
чточто
Sign
ω
ω
– модуль и знак сигнала частотно-токового
ограничения
что
ω
; – уставка порога срабатывания частотно-
токового ограничения;
– безразмерный коэффициент, опреде-
ляющий крутизну наклона электромеханической характеристики в об-
ласти частотно-токового ограничения. При
что
I
что
K
1
=
что
K крутизна элек-
тромеханической характеристики
чтономчто
IS
ω
−
=
.
r
ω
что
I
то
I
упора
I
s
I
Рис.10.12. Электромеханическая характеристика привода с учётом час-
тотно-токового ограничения
Изменение знака
что
ω
в зависимости от режима работы электро-
привода позволяет осуществлять частотно-токовое ограничение во
всех четырех квадрантах механической характеристики.
Блок коррекции, выполненный в виде апериодического звена пер-
вого порядка, осуществляет последовательную коррекцию динамиче-
ских характеристик электропривода. Выходной сигнал блока коррек-
ции поступает на выход формирователя частоты через ограничитель,
устанавливающий значения верхнего и
нижнего порога задания по
частоте.
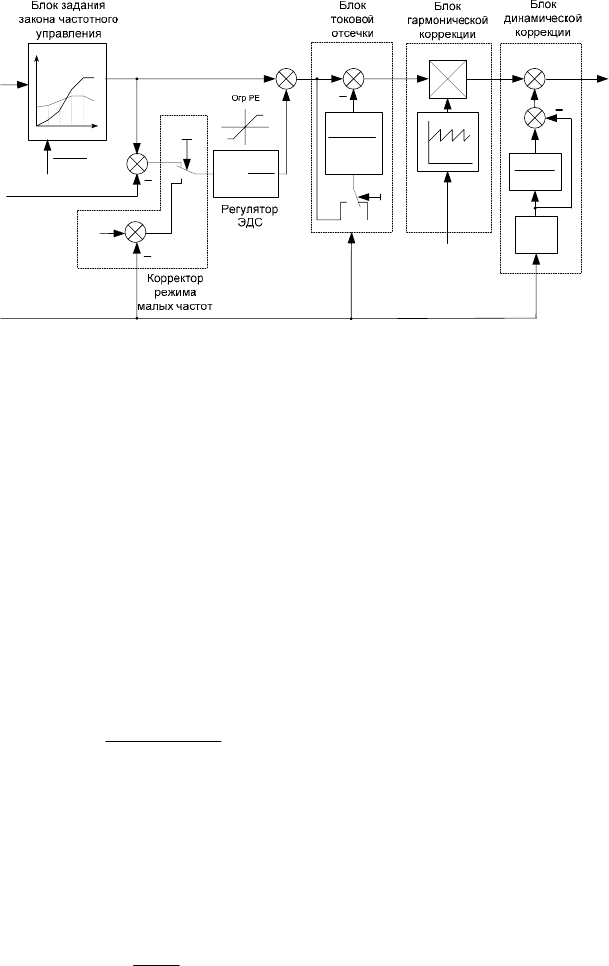
Формирователь напряжения (рис.10.13) включает в себя блок за-
дания закона управления, корректор режима малых частот, регулятор
ЭДС, блок токовой отсечки, блок гармонической коррекции и блок
динамической коррекции. Входными сигналами формирователя на-
пряжения являются задание по частоте
, ток статора и ЭДС
sz
ω
s
I
E
.
187
1
1
+pT
фто
sz
ω
s
I
)(
I
I
n
mном
m
ω
n = 15..
min
*
ω>ω
s
mном
I
2
z
U
U
ОТ
от
s
II
<
0
гк
K
s
ω
3
z
U
4
z
U
5
z
U
sz
U
E
*
ω
1
1
+pT
дк
дк
K
*
m
I
pT
K
рe
рe
1
+
E
sz
ω
z
E
Рис.10.13. Функциональная схема формирователя напряжения
Блок задания закона управления формирует зависимость заданного
значения ЭДС от частоты
. Задание закона управления
осуществляется с пульта управления по точкам в масштабе относи-
тельных значений тока намагничивания (всего предусмотрено задание
пяти точек). В процессе работы выполняется перерасчет закона управ-
ления в масштаб ЭДС на основе линейной аппроксимации зависимо-
сти между соседними точками.
)(
szz
E
ω
Блок работает по следующему алгоритму.
1. Определяется отрезок частотного
диапазона, которому принадле-
жит текущее значение частоты
. ],[
конначsz
ωωω
∈
2. Определяется текущее значение относительного тока намагничи-
вания
,)(
начsz
начкон
начкон
нач
II
II
ωω
ωω
δ
δ
δδ
−
−
−
+=
(10.21)
где
коннач
II
δ
δ
, – относительные значения тока намагничивания в
крайних точках отрезка частоты.
3. Определяются текущие значения задания по току намагничивания
и ЭДС:
,
;
ном
sz
номz
номmmz
UIE
III
ω
ω
δ
δ
⋅=
⋅=
(10.22)
188

где
номном
U
ω
, – номинальные значения напряжения и частоты двига-
теля.
Корректор режима малых частот обеспечивает нормальное
функционирование электропривода вплоть до полного его останова.
Для этого на определенном уровне частоты
min
ω
ω
=
s
, при котором
точность вычисления ЭДС, а следовательно, и точность ориентации
других переменных, становится недопустимо низкой, производится
отключение регулятора ЭДС и переход в режим стабилизации тока
статора на уровне номинального значения тока намагничивания. Это
обеспечивает необходимый уровень тока намагничивания вплоть до
нулевой частоты. Порог частоты, на которой переключается структура
регулятора определяет
минимальный уровень регулирования скорости
привода. Он находится в пределах 1–2 Гц.
Регулятор ЭДС обеспечивает соблюдение заданного статического
закона частотного управления во всех режимах работы электроприво-
да, в том числе при случайном характере изменения нагрузки. Про-
порционально-интегральная структура регулятора обеспечивает ми-
нимизацию статической ошибки регулирования и формирование же-
лаемых динамических свойств контура
ЭДС.
Блок токовой отсечки реализует второй уровень ограничения тока
статора, осуществляемый дополнительным воздействием на канал
формирования напряжения. Блок работает следующим образом. Если
ток статора не превышает уровень уставки токовой отсечки
, то
блок токовой отсечки передает входной сигнал задания по напряже-
нию
на свой выход без каких-либо изменений. В противном слу-
чае, на второй вход суммирующего элемента блока через корректи-
рующий фильтр токовой отсечки подается с отрицательным знаком
входной сигнал задания по напряжению. В результате передаточная
функция блока токовой отсечки принимает вид реального дифферен-
цирующего звена с постоянной времени
:
от
I
2z
U
фто
T
.
1)(
)(
)(
2
3
+
==
pT
pT
pU
pU
pH
фто
фто
z
z
бто
(10.23)
189
Выходной сигнал блока токовой отсечки
начинает уменьшаться
по экспоненциальному закону от значения
до нуля с постоянной
времени фильтра
. Если при этом ток статора уменьшается ниже
уровня уставки токовой отсечки
, то блок начинает работать в ре-
жиме переключений, обеспечивая поддержание среднего значения то-
ка статора на уровне уставки. Возвращение системы управления из
3z
U
2z
U
фто
T
от
I

режима токовой отсечки в нормальный режим работы также происхо-
дит с постоянной времени фильтра токовой отсечки
, что исклю-
чает нежелательные резкие скачки в напряжении задания. На рис.10.12
области действия токовой отсечки соответствует вертикальный уча-
сток электромеханической характеристики привода.
фто
T
Заметим, что блок токовой отсечки, так же как и блок частотно-
токового ограничения, в силу определенной инерционности своего
действия не обеспечивает защиту электропривода от резких изменений
выходного тока
преобразователя, вызываемых, например, короткими
замыканиями в нагрузке. В таких режимах срабатывает максимально-
токовая защита преобразователя.
Блок гармонической коррекции осуществляет стыковку участков
синхронного алгоритма модуляции по амплитуде основной гармоники
выходного напряжения преобразователя. Использование принципа
синхронной модуляции с коэффициентом, кратным 6, обеспечивает
минимизацию субгармонических составляющих в переменных приво-
да. Заметное воздействие этого блока на
канал формирования напря-
жения проявляется только на больших частотах работы привода
. При )400( Гцf
u
> Гцf
u
400
<
коэффициент гармонической
коррекции
1
≈
гк
K . Всего алгоритм модуляции выходного напряже-
ния содержит несколько синхронных и 1 асинхронный участок. Коэф-
фициенты коррекции определены на границах синхронных участков.
Внутри каждого участка их расчет осуществляется на основе линейной
аппроксимации коэффициентов на границах.
Блок динамической коррекции обеспечивает формирование желае-
мого запаса устойчивости электропривода во всем диапазоне регули-
рования частоты. Вообще
говоря, проблема обеспечения устойчивости
во всем рабочем диапазоне очень характерна именно для приводов с
частотным управлением. Иногда эту проблему решают за счет «выре-
зания» определенных участков частотного спектра. В нашем случае
проблема устойчивости решена за счет введения быстродействующей
гибкой отрицательной обратной связи по току статора. Гибкой – то
есть воздействующей на канал
напряжения только в динамике и не
влияющей на статические характеристики привода.
Передаточная функция блока динамической коррекции может
быть представлена в виде реального дифференцирующего звена с пе-
редаточной функцией вида
1)(
)(
)(
+
−==
pT
pTK
pI
pU
pH
дк
дкдк
s
дк
дк
.
190