Greenwood D.T. Advanced Dynamics
Подождите немного. Документ загружается.


379 Kinematic constraints
vector are expressed in terms of the same nonorthogonal components whose directions lie
along the normals to the constraint surfaces.
The qs, found by using (6.395), are
x = 2xC
1
+ C
2
(6.404)
y = 2yC
1
+ C
2
(6.405)
z =−
1
2
zC
1
+ C
2
(6.406)
The velocity corrections are obtained by solving first for the K s, using the equations
4x
2
+ 4y
2
+
1
4
z
2
K
1
+
2x + 2y −
1
2
z
K
2
=−
˙
φ
1
(6.407)
2x + 2y −
1
2
z
K
1
+ 3K
2
=−
˙
φ
2
(6.408)
Then the K s are substituted into (6.372). The results are
˙
x = 2xK
1
+ K
2
(6.409)
˙
y = 2yK
1
+ K
2
(6.410)
˙
z =−
1
2
zK
1
+ K
2
(6.411)
A comparison of the numerical results obtained by using the Baumgarte method or the
one-step method of representing holonomic constraints shows that the one-step method is
much more accurate, although either method may be acceptable for a relatively small step
size. On the other hand, the two methods show about the same accuracy with respect to
the time response, as measured by the period. Time errors are determined primarily by
truncation errors associated with the integration algorithm.
One-step method for nonholonomic constraints
The procedure for applying the one-step method to systems with nonholonomic constraints
begins in the same way as with the Baumgarte method, except that the U s are set equal to
zero. Thus, assuming m nonholonomic constraints of the form
g
j
(q,
˙
q, t) = 0(j = 1,...,m) (6.412)
one can write the dynamical equations as in (6.330), namely,
d
dt
∂T
∂
˙
q
i
−
∂T
∂q
i
=
m
j=1
λ
j
∂g
j
∂
˙
q
i
+ Q
i
(q,
˙
q, t)(i = 1,...,n) (6.413)
Next, differentiate the constraint functions with respect to time, obtaining
˙
g
j
(q,
˙
q,
¨
q, t) = 0(j = 1,...,m) (6.414)
One can solve the n equations of (6.413) for the n
¨
qs as functions of (q,
˙
q,λ,t) and these
expressions are then substituted into (6.414), obtaining m equations which are linear in the

380 Introduction to numerical methods
λs. After solving these equations for λ
j
(q,
˙
q, t), ( j = 1,...,m), we substitute back into
the
¨
q expressions to obtain the final dynamical equations of the form
¨
q
i
=
¨
q
i
(q,
˙
q, t)(i = 1,...,n) (6.415)
At this point, we should explain that another method such as Maggi’s equation plus (6.414)
might be used in obtaining (6.415).
The n second-order dynamical equations can be converted to 2n first-order equations
which are integrated numerically. At the end of each step, we wish to apply a one-step
correction to the solution. The fact that the system is nonholonomic results in an impor-
tant difference in the correction strategy, as compared to the holonomic case. Due to the
nonintegrable nature of the constraints, there is no direct way of detecting errors in the
configuration, that is, the qs. On the other hand, for any given configuration, velocity errors
result in a separation of the solution point from the constraint surface in velocity space.
These errors can be detected and corrections made to the
˙
qs. Another reason for this ap-
proach is the fact that, at least for holonomic systems, errors in the
˙
φs tend to be much
larger than configuration errors as measured by the φs. In other words, the errors in the
˙
qs
tend to be larger than errors in the qs due to the smoothing effect of the integration process.
Our approach, then, will be to make one-step corrections in a manner similar to the velocity
corrections for holonomic constraints.
First, we require that the velocity correction vector be a linear combination of the indi-
vidual constraint gradient vectors in velocity space.
˙
q
i
=
m
k=1
K
k
∂g
k
∂
˙
q
i
(i = 1,...,n) (6.416)
Next, the corrections must exactly cancel the constraint errors, that is,
n
i=1
∂g
j
∂
˙
q
i
˙
q
i
=−g
j
( j = 1,...,m) (6.417)
or
n
i=1
m
k=1
K
k
∂g
j
∂
˙
q
i
∂g
k
∂
˙
q
i
=−g
j
( j = 1,...,m) (6.418)
These m equations are solved for the mKs and then the velocity corrections are made
using (6.416).
Example 6.6 Let us consider once again a nonholonomic system consisting of a dumb-
bell sliding on a horizontal plane and constrained by a knife edge at one of the particles
(Fig. 6.6). The nonholonomic constraint equation is
g
1
(q,
˙
q) =−
˙
x sin φ +
˙
y cos φ = 0 (6.419)
381 Kinematic constraints
which states that the transverse velocity at particle 1 is equal to zero. Following the procedure
of Example 6.4 on page 370 for the case in which U = 0, we obtain the dynamical equations:
¨
x =
1
2
l
˙
φ
2
cos φ −
˙
φ sin φ(
˙
x cos φ +
˙
y sin φ) (6.420)
¨
y =
1
2
l
˙
φ
2
sin φ +
˙
φ cos φ(
˙
x cos φ +
˙
y sin φ) (6.421)
¨
φ =−
˙
φ
l
(
˙
x cos φ +
˙
y sin φ) (6.422)
The equations are integrated numerically. At the end of each time step, the nonholonomic
constraint function g
1
is evaluated. From (6.418), we find that
K (sin
2
φ + cos
2
φ) =−g
1
(6.423)
or
K =−g
1
(6.424)
Then, from (6.416), the one-step velocity corrections are
˙
x =−g
1
sin φ (6.425)
˙
y = g
1
cos φ (6.426)
˙
φ = 0 (6.427)
Thus, at the end of each time step in the numerical integration, the value of the nonholonomic
constraint function is approximately zero.
A comparison of constraint enforcement methods
If the given holonomic and nonholonomic examples are analyzed numerically for typi-
cal cases, some observations and conclusions can be made. For the holonomic system of
Example 6.5 on page 376, the results are much more accurate for the one-step method than
for the Baumgarte method. This is particularly true of the velocities and amounts to about
two additional decimal digits of accurate data for the same step size, using the RK-2 algo-
rithm. The configuration accuracy is also much superior for the one-step method, although
both methods show satisfactory accuracy for a relatively small step size. A comparison of
computing times shows that the one-step method requires about one-third more time for the
same step size.
If one compares the Baumgarte and one-step methods, as they are applied to nonholo-
nomic systems such as Example 6.6 on page 380, the one-step method again provides
superior accuracy. Both methods, however, exhibit some loss of accuracy for nonholo-
nomic constraints. This arises because there is no direct way of detecting configuration
errors for nonholonomic systems as the computation proceeds.
A comparison of the solution accuracies of the two methods with respect to time shows
roughly the same accuracy. This occurs because time accuracy is not closely related to con-
figuration accuracy. Rather, the time aspect of the computations, as indicated by the period

382 Introduction to numerical methods
of the motion, for example, is strongly influenced by the choice of the integration algorithm
and the step size. The truncation errors are the most important factor. For conservative
systems such as we have been studying, the overall accuracy can be improved by making
further corrections based on energy errors. These errors tend to appear as velocity errors
whose magnitudes increase with time. This affects the periods and other important charac-
teristics of the motion. The use of energy methods in improving computational accuracy
will be considered in Section 6.6.
Euler parameter constraints
The four Euler parameters (
x
,
y
,
z
,η) were introduced in Section 3.1 as generalized
coordinates to represent the orientation of a rigid body relative to some frame, usually an
inertial frame. Since a rigid body has only three rotational degrees of freedom, there must
be an equation of constraint relating the Euler parameters. It is the holonomic constraint
φ(
x
,
y
,
z
,η) =
2
x
+
2
y
+
2
z
+ η
2
− 1 = 0 (6.428)
In accordance with (3.80), the Euler parameters are generated by the numerical integration
of four first-order kinematical equations, namely,
˙
x
=
1
2
(ω
z
y
− ω
y
z
+ ω
x
η) (6.429)
˙
y
=
1
2
(ω
x
z
− ω
z
x
+ ω
y
η) (6.430)
˙
z
=
1
2
(ω
y
x
− ω
x
y
+ ω
z
η) (6.431)
˙η =−
1
2
(ω
x
x
+ ω
y
y
+ ω
z
z
) (6.432)
The body-axis angular velocity components (ω
x
,ω
y
,ω
z
) are obtained by the numerical
integration of the rotational equations of motion.
Let us use the one-step method to correct any constraint errors. First, calculate the gradient
vector in q-space at the operating point.
∇φ = [2
x
2
y
2
z
2η]
T
(6.433)
Next, we require the correction vector q to exactly compensate for the constraint error at
the end of each time step, that is,
∇φ · q =−φ (6.434)
where
q = C∇φ (6.435)
Thus, we take the correction vector in the direction of the gradient ∇φ. From (6.434) and
(6.435), the coefficient C is
C =
−φ
∇φ ·∇φ
=
−φ
4
2
x
+
2
y
+
2
z
+ η
2
≈−
φ
4
(6.436)

383 Energy and momentum methods
In detail, the corrections to the generalized coordinates are
x
=−
1
2
x
φ,
y
=−
1
2
y
φ,
z
=−
1
2
z
φ, η =−
1
2
ηφ (6.437)
Note that this correction q does not change the direction of the configuration vector q in
4-space.
The correction of the Euler parameter values does not cause a risk of numerical instability
because, in the usual case of rigid body motion, the Euler parameter values do not enter the
dynamical equations. Thus, there is no need to set
˙
φ or
¨
φ equal to zero, thereby avoiding
tendencies toward numerical instability. Instead, the dynamical equations are written in
terms of quasi-velocities (ωs) and the Euler parameter calculations for the orientation are
performed separately.
6.6 Energy and momentum methods
In assessing the accuracy of numerically computed solutions of the equations of motion
of a dynamical system, it is helpful to have relatively simple check solutions available. A
common approach is to use integrals of the motion, that is, functions whose values remain
constant during the course of the solution, as checks on accuracy. For example, the energy
integral E = T
2
− T
0
+ V may be used for conservative systems. Other systems may have
one or more components of momentum or angular momentum conserved. Integrals of the
motion are particularly effective in detecting programming errors. Of course, these methods
are ineffective against errors in the values of the physical parameters.
Energy corrections
Let us consider a conservative system whose energy integral has the form
E(q,
˙
q) = T
2
− T
0
+ V = E
0
(6.438)
At each time step in the numerical solution, we wish to correct for an energy error E
given by
E = E − E
0
(6.439)
where E
0
is evaluated from the initial conditions.
First let us note that, for a given configuration and energy constant E
0
, the equation
E(q,
˙
q) − E
0
= 0 (6.440)
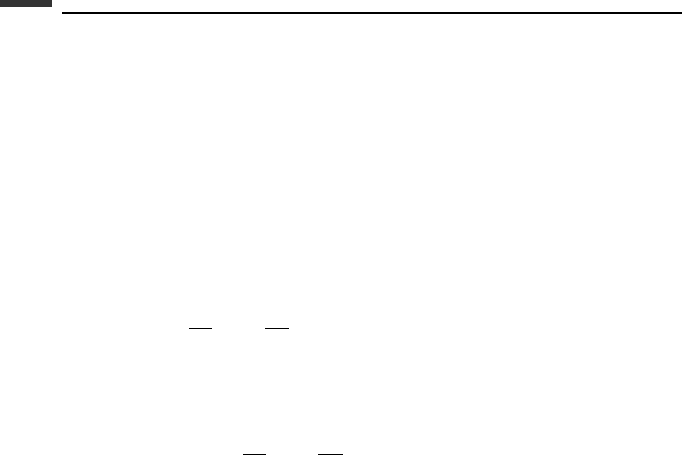
represents a surface in n-dimensional velocity space (Fig. 6.9). Since the kinetic energy
function T (q,
˙
q) is positive definite and quadratic in the
˙
qs, the form of the energy surface
is ellipsoidal for the particular case of 3-space.
The velocity correction
˙
q will be taken in the direction normal to the energy surface,
that is, in the direction of the gradient ∇E or ∇T . In accordance with the one-step method,

384 Introduction to numerical methods
q
2
E−E
0
= 0
.
q
.
∆q
.
.
q
1
Figure 6.9.
let us assume that
˙
q = K ∇T (6.441)
and choose the value of K such that
∇T ·
˙
q =−E (6.442)
which results in the exact cancellation of the energy error. Thus, we obtain
K =
−E
(∇T )
2
=−E
n
j=1
∂T
∂
˙
q
j
2
−1
(6.443)
The individual velocity corrections are
˙
q
i
= K
∂T
∂
˙
q
i
(i = 1,...,n) (6.444)
If the conservative system is subject to kinematic constraints, the corresponding constraint
surfaces in velocity space are typically planes passing through the origin. The velocity vector
˙
q is constrained to lie in the common intersection of these planes. Any velocity correction
is taken in a direction normal to
˙
q. But from Fig. 6.9 we see that the velocity correction
˙
q
for an energy error is approximately the same direction as
˙
q. (It is exactly the same direction
if the energy surface is spherical.) Thus, the velocity corrections for constraint errors and
energy errors are approximately normal to each other and do not interact very strongly.
From (6.443) and (6.444), we see that
˙
q can be quite large if the magnitude of
˙
q or
the generalized momentum vector is very small. For most dynamical systems, this will not
occur. But if the kinetic energy T
2
does attain a small value compared to its maximum during
the motion of the conservative system, then significant errors in the corrections
˙
q
i
can
occur because the linear theory assumes small perturbations. In this case, it is preferable to
make the corrections in configuration space rather than velocity space, so long as T
2
and
˙
q
remain small.

385 Energy and momentum methods
Proceeding, then, along these lines, we can write
E = T
2
+ V
= E
0
(6.445)
where
V
(q) = V − T
0
(6.446)
Then, using a similar analysis, and taking the correction q in the direction of the gradient
of V
in configuration space, we obtain
q
i
=−E
n
j=1
∂V
∂q
j
2
−1
∂V
∂q
i
(i = 1,...,n) (6.447)
When T
2
is no longer small, it is preferable to return to corrections in velocity space since
velocity errors tend to be larger.
If the kinetic energy is expressed in terms of quasi-velocities (us) rather than true ve-
locities (
˙
qs), the analysis proceeds similarly to that resulting in (6.443) and (6.444). Thus,
substituting u
j
for
˙
q
j
, we obtain the corrections
u
i
=−E
n−m
j=1
∂T
∂u
j
2
−1
∂T
∂u
i
(i = 1,...,n − m) (6.448)
where there are m constraints and (n − m) independent us.
Example 6.7 Let us consider the correction of energy errors in the free rotational motion
of a rigid body in space. The rotational kinetic energy is
T =
1
2
I
xx
ω
2
x
+
1
2
I
yy
ω
2
y
+
1
2
I
zz
ω
2
z
(6.449)
where the principal moments of inertia are taken about the center of mass. The angular
velocity components (ω
x
,ω
y
,ω
z
) are quasi-velocities, so (6.448) applies. The corrections
are
ω
i
=
−EI
ii
ω
i
I
xx
ω
2
x
+ I
yy
ω
2
y
+ I
zz
ω
2
z
(i = x, y, z) (6.450)
Notice that the correction vector ω has the same direction as the angular momentum.
H = I
xx
ω
x
i + I
yy
ω
y
j + I
zz
ω
z
k (6.451)
where (i, j, k) are body-fixed Cartesian unit vectors. This ω is of minimum magnitude
for the given energy correction.
Work and energy
We have been concerned with numerical checks and corrections as they are applied to
conservative systems. Now let us extend the theory to nonconservative systems. We shall
consider two basic methods.

386 Introduction to numerical methods
First method
Let us apply the principle of work and kinetic energy to a system of N rigid bodies. The
velocity of the reference point P
i
of the i th body is v
i
and its angular velocity is ω
i
. The total
effect of all the forces, including constraint forces, which act on the ith body are equivalent
to a force F
i
acting at the reference point plus a couple of moment M
i
. Then, since
˙
T =
˙
W (6.452)
where, from (4.357),
˙
W =
N
i=1
(F
i
· v
i
+ M
i
· ω
i
) (6.453)
we can integrate with respect to time to obtain
T =
t
2
t
1
N
i=1
(F
i
· v
i
+ M
i
· ω
i
)dt (6.454)
At any time t
2
, this value of T can be used as a check by comparing it with a value of
T obtained from the solution of the differential equations. To be effective, the separate
integration given by (6.454) must be at least as accurate as the T obtained from the
numerical solution of the equations of motion.
If a portion of F
i
and of M
i
arise from a potential energy function V (q, t), but F
i
and
M
i
are the portions that are not due to potential energy, then in accordance with (4.364) we
can write
(T + V ) =
t
2
t
1
N
i=1
(F
i
· v
i
+ M
i
· ω
i
) +
∂V
∂t
dt (6.455)
This calculation can also be used as a check on the numerical solution of differential
equations.
The above approach is relatively direct and effective when it is applicable. It turns out,
however, that F
i
and M
i
frequently include unknown constraint forces.
Second method
Another approach is to make energy checks using the energy integral E = T
2
− T
0
+ V
rather than the total energy T + V . Consider a nonholonomic system consisting of N rigid
bodies, with a kinetic energy T (q, u, t) and potential energy V (q, t ). Suppose there are n
qs and m constraints. The n
˙
qs and (n − m) us are related by
˙
q
i
=
n−m
j=1
ij
(q, t)u
j
+
it
(q, t)(i = 1,...,n) (6.456)
387 Energy and momentum methods
The velocity of the center of mass of the ith body is
v
i
=
n−m
j=1
γ
ij
(q, t)u
j
+ γ
it
(q, t)(i = 1,...,N ) (6.457)
and the angular velocity is
ω
i
=
n−m
j=1
β
ij
(q, t)u
j
+ β
it
(q, t)(i = 1,...,N ) (6.458)
Then, in accordance with (4.380), we find that the energy rate is
˙
E =
˙
T
2
−
˙
T
0
+
˙
V
=
n−m
j=1
Q
j
u
j
+
∂V
∂t
+
n
k=1
∂V
∂q
k
kt
−
N
i=1
p
i
· ˙γ
it
−
N
i=1
H
ci
·
˙
β
it
(6.459)
where p
i
is the linear momentum of the i th body and H
ci
is the angular momentum about
its center of mass. Integration of
˙
E with respect to time results in
E =
t
2
t
1
n−m
j=1
Q
j
u
j
+
∂V
∂t
+
n
k=1
∂V
∂q
k
kt
−
N
i=1
p
i
· ˙γ
it
−
N
i=1
H
ci
·
˙
β
it
dt (6.460)
This result can be used as a numerical check on the accuracy of E found from the
numerical integration of the equations of motion. For the usual case of ideal constraints
and independent us, the Q
j
generalized forces will not involve constraint forces, and thus
will be known functions or equal to zero. Note that ˙γ
it
and
˙
β
it
represent linear or angular
accelerations when all the us are set equal to zero, that is, they generally appear only if there
are moving constraints. Thus, in spite of the apparent complexity, (6.460) is often relatively
easy to evaluate.
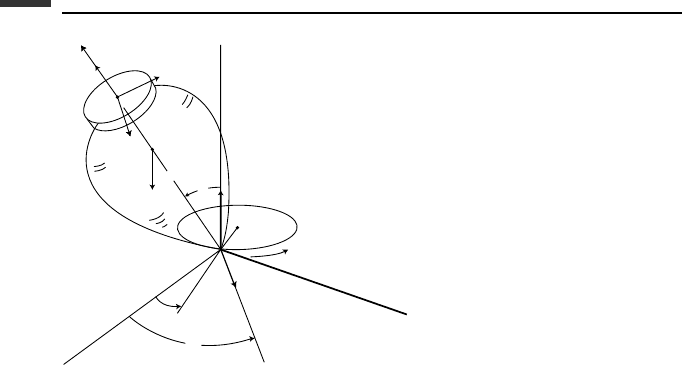
Example 6.8 Let us consider work and energy relationships for a rheonomic system
consisting of a top whose point is constrained to move uniformly around a horizontal circle
of radius r (Fig. 6.10). The configuration is given by type II Euler angles. Let us choose
(
˙
φ,
˙
θ,)asus, where is the angular velocity of the top about its symmetry axis. The
angular velocity of the point P along its path is ω
0
. The ijkunit vectors are as shown,
with i remaining horizontal and jkdefining a vertical plane. Since the motion of the point
P is known, the easiest approach is to consider that point fixed, and then apply a horizontal
inertial force at the center of mass due to the actual acceleration of P. With this assumption,
the velocity of the center of mass is linear and homogeneous in the us, so
γ
1t
= 0 (6.461)
The angular velocity of the top is
ω
1
=
˙
θi +
˙
φ sin θ j + k (6.462)
388 Introduction to numerical methods
X
Y
ω
0
Z
O
P
ω
0
t
φ
q
θ
.
.
l
mg
i
j
k
Ω
r
Figure 6.10.
Note that
˙
φ = u
1
,
˙
θ = u
2
,
˙
ψ =−u
1
cos θ + u
3
(6.463)
We see from (6.462) and (6.463) that
β
11
= sin θ j, β
12
= i, β
13
= k, β
1t
= 0 (6.464)
and also that
1t
=
2t
=
3t
= 0 (6.465)
The potential energy is
V = mgl cos θ (6.466)
From the general energy rate equation (6.459), we see that the last four terms vanish,
leaving
˙
E =
˙
T
2
−
˙
T
0
+
˙
V =
3
j=1
Q
j
u
j
(6.467)
where the Q
j
generalized forces are inertial.
The acceleration of P in the actual motion is rω
2
0
and is directed from P toward O. The
corresponding inertial force applied at the center of mass results in
Q
1
= mlrω
2
0
sin θ cos(φ − ω
0
t)
Q
2
= mlrω
2
0
cos θ sin(φ − ω
0
t)
Q
3
= 0 (6.468)