Baumgarte T., Shapiro S. Numerical Relativity. Solving Einstein’s Equations on the Computer
Подождите немного. Документ загружается.

2.6 The constraint and evolution equations 41
The Hamiltonian constraint (2.90) and the momentum constraint (2.96)arethedirect
equivalent of the constraints (2.5) and (2.6) in electrodynamics. They involve only the
spatial metric, the extrinsic curvature, and their spatial derivatives. They are the conditions
that allow a 3-dimensional slice with data (γ
ab
, K
ab
) to be embedded in a 4-dimensional
manifold M with data (g
ab
). Field data (γ
ab
, K
ab
) that are being imposed on a timeslice
have to satisfy the two constraint equations. We will discuss strategies for solving the
constraint equations and finding initial data that represent a snapshot of the gravitational
fields at a certain instant of time in Chapter 3.
The evolution equations that evolve the data (γ
ab
, K
ab
) forward in time can be found
from (2.53), which can be considered as the definition of the extrinsic curvature, and the
Ricci equation (2.82). However, the Lie derivative along n
a
, L
n
, is not a natural time
derivative since n
a
is not dual to the surface 1-form
a
, i.e., their dot product is not unity
but rather
n
a
a
=−αg
ab
∇
a
t∇
b
t = α
−1
. (2.97)
Instead, consider the vector
t
a
= αn
a
+ β
a
, (2.98)
which is dual to
a
for any spatial shift vector β
a
,
t
a
a
= αn
a
a
+ β
a
a
= 1. (2.99)
It will prove useful to choose t
a
to be the congruence along which we propagate the spatial
coordinate grid from one time slice to the next slice. In other words, t
a
will connect points
with the same spatial coordinates on neighboring time slices. Then the shift vector β
a
will measure the amount by which the spatial coordinates are shifted within a slice with
respect to the normal vector, as illustrated in Figure 2.4. As we have noted before, the lapse
function α measures how much proper time elapses between neighboring time slices along
the normal vector. The lapse and the shift therefore determine how the coordinates evolve
in time. The choice of α and β
a
is quite arbitrary, and we will postpone a discussion of
some common choices to Chapter 4. The freedom to choose these four gauge functions
α and β
a
completely arbitrarily embodies the four-fold coordinate degrees of freedom
inherent in general relativity.
11
Specifically, the lapse function reflects the freedom to
choose the sequence of time slices, pushing them forward by different amounts of proper
time at different spatial points on a slice and thus exploiting “the many-fingered nature
of time”.
12
The shift vector reflects the freedom to relabel spatial coordinates on each
slice in an arbitrary way. Observers who are “at rest” relative to the slices follow the
normal congruence n
a
and are called either normal or Eulerian observers, while observers
11
Recall that β
a
is spatial and therefore subject to the constraint that n
a
β
a
= 0, hence only three of its components may
be freely specified.
12
See, e.g., Misner et al. (1973), p. 527.
42 Chapter 2 The 3+1 decompostion of Einstein’s equations
following the congruence t
a
are called coordinate observers. If matter is present it moves
entirely independently of the coordinates with 4-velocity u
a
.
The duality t
a
∇
a
t = 1 implies that the integral curves of t
a
are naturally parametrized
by t. As a consequence, all (infinitesimal) vectors t
a
dt (and hence αn
a
dt) originating on
one spatial slice
t
will end on the same spatial slice
t+dt
(unlike the corresponding
vectors n
a
dt, which generally would end on different slices).
13
This also implies that the
Lie derivative of any spatial tensor along t
a
is again spatial (see also exercise 2.18).
Exercise 2.21 (a) Show that the Lie derivative of the projection operator along αn
a
vanishes:
L
αn
γ
a
b
= 0. (2.100)
(b) Show that the Lie derivative of any spatial tensor along αn
a
is again spatial.
Consider now the Lie derivative of K
ab
along t
a
,
L
t
K
ab
= L
αn+β
K
ab
= αL
n
K
ab
+ L
β
K
ab
, (2.101)
which follows from the definition of the Lie derivative. Here we can insert the Ricci
equation (2.82) to eliminate
L
n
K
ab
.
Before we do so, we first rewrite the projection of
(4)
R
abcd
that appears in equation (2.82)
as
n
d
n
c
γ
q
a
γ
r
b
(4)
R
drcq
= γ
cd
γ
q
a
γ
r
b
(4)
R
drcq
− γ
q
a
γ
r
b
(4)
R
rq
. (2.102)
Next we can replace the first term on the right hand side above by substituting Gauss’
equation (2.84) and the second term by substituting Einstein’s equations:
n
d
n
c
γ
q
a
γ
r
b
(4)
R
drcq
= R
ab
+ KK
ab
− K
ac
K
c
b
− 8πγ
q
a
γ
r
b
T
rq
−
1
2
g
rq
T
, (2.103)
where T = T
ab
g
ab
. We now define the spatial stress and its trace according to
S
ab
≡ γ
c
a
γ
d
b
T
cd
S ≡ S
a
a
. (2.104)
We can then evaluate the last term in equation (2.103)as
γ
q
a
γ
r
b
g
rq
g
ef
T
ef
= γ
ab
(γ
ef
− n
e
n
f
)T
ef
= γ
ab
(S − ρ). (2.105)
Inserting these expressions into (2.82) and (2.101), we find
L
t
K
ab
=−D
a
D
b
α + α(R
ab
− 2K
ac
K
c
b
+ KK
ab
) − 8πα(S
ab
−
1
2
γ
ab
(S − ρ)) + L
β
K
ab
.
(2.106)
13
Simply stated, the change in t along the vector t
a
is dt = t
a
∇
a
t = 1 and is thus the same value at all points on the
hypersurface
t
. Hence the vector congruence t
a
connects the hypersurface t = constant (
t
) to the hypersurface
t + dt = constant (
t+dt
). In the language of differential forms, the spatial slice
t
represented by the 1-form
dt is
pierced by the vector t
a
by the same amount everywhere on the hypersurface surface,
dt, t
a
=t
a
∇
a
t = 1, implying
that t
a
connects the two neighboring hypersurfaces.

2.7 Choosing basis vectors: the ADM equations 43
This is the evolution equation for the extrinsic curvature. Note that all differential operators
and the Ricci tensor R
ab
are associated with the spatial metric γ
ab
.
Exercise 2.22 Show that raising an index in equation (2.106) yields
L
t
K
a
b
=−D
a
D
b
α + α(R
a
b
+ KK
a
b
) − 8πα(S
a
b
−
1
2
γ
a
b
(S − ρ))
+
L
β
K
a
b
. (2.107)
The evolution equation for the spatial metric γ
ab
, the last missing piece, can be found
directly from equation (2.53), again using equation (2.98),
L
t
γ
ab
=−2α K
ab
+ L
β
γ
ab
. (2.108)
The coupled evolution equations (2.106) and (2.108) determine the evolution of the
gravitational field data (γ
ab
, K
ab
). Together with the constraint equations (2.90) and (2.96)
they are completely equivalent to Einstein’s equations (2.83). Note we have succeeded
in recasting Einstein’s equations, which are second order in time in their original form,
as a coupled set of partial differential equations that are now first order in time. As in
electrodynamics, the evolution equations conserve the constraint equations, i.e., if the field
data (γ
ab
, K
ab
) satisfy the constraints at some time t and are evolved with the evolution
equations, then the data will also satisfy the constraint equations at all later times (see
exercises 2.1 and 2.2).
2.7 Choosing basis vectors: the ADM equations
So far, we have expressed our equations in a covariant, coordinate-independent manner,
i.e., the basis vectors e
a
(b)
have been completely arbitrary and have no particular relationship
to the 1-form
a
or to the congruence defined by t
a
. It is quite intuitive, though, that things
will simplify if we adopt a coordinate system that reflects our 3 + 1 split of spacetime
in a natural way. We will see that the Lie derivative in the evolution equations (2.106)
and (2.108) then reduces to a partial derivative with respect to coordinate time and, as an
additional benefit, we will be able to ignore all timelike components of spatial tensors.
To do so, we first introduce a basis of three spatial vectors e
a
(i)
(the subscript i = 1, 2, 3
distinguishes the vectors, not the components; we again refer the reader to Section 2.1 for
a summary of our notation) that reside in a particular time slice ,
14
a
e
a
(i)
= 0. (2.109)
We extend our spatial vectors to other slices by Lie dragging along t
a
,
L
t
e
a
(i)
= 0, (2.110)
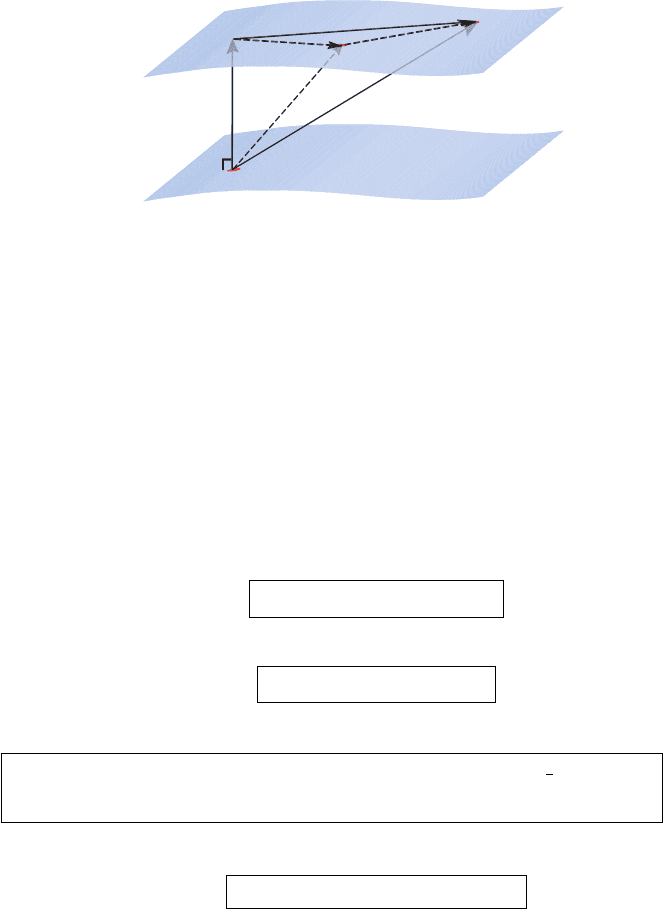
as illustrated in Figure 2.3.
14
In the language of differential forms, the spatial vectors e
a
(i)
do not pierce the spatial hypersurface :
, e
(i)
=
a
e
a
(i)
= 0.

44 Chapter 2 The 3+1 decompostion of Einstein’s equations
Figure 2.3 Spatial basis vectors e
a
(i)
are Lie dragged from one spacelike slice to the next along the coordinate
congruence t
a
. Consequently, these basis vectors connect points with the same spatial coordinates on
neighboring slices (e.g., points A, B and C on slice t have the same spatial coordinates as points A
, B
and C
,
respectively, on slice t + dt).
Exercise 2.23 Show that a spatial vector e
a
(i)
that is Lie dragged along t
a
remains
spatial, i.e., show that
L
t
(
a
e
a
(i)
) = 0. (2.111)
As the fourth basis vector we pick e
a
(0)
= t
a
. Recall that we want to set the vector
congruence t
a
to be tangent to the coordinate line congruence and therefore connect points
with the same spatial coordinates on neighboring time slices. The duality condition (2.99)
then implies that e
a
(0)
has the components
15
t
a
= e
a
(0)
= (1, 0, 0, 0). (2.112)
This means that the Lie derivative along t
a
reduces to a partial derivative with respect to
t :
L
t
= ∂
t
(see equation A.10).
From equation (2.109)wenowfind
a
e
a
(i)
=−
1
α
n
a
e
a
(i)
= 0, (2.113)
which, since the e
a
(i)
span , implies that the covariant spatial components of the normal
vector have to vanish,
n
i
= 0. (2.114)
Since spatial tensors vanish when contracted with the normal vector, this also means that
all components of spatial tensors with a contravariant index equal to zero must vanish. For
the shift vector, for example, this implies n
a
β
a
= n
0
β
0
= 0 and hence
β
a
= (0,β
i
). (2.115)
Solving equation (2.98)forn
a
then yields the contravariant components
n
a
= (α
−1
, −α
−1
β
i
), (2.116)
15
Strictly, equation (2.112) is not a tensor equation, but rather a specification of components in the adopted basis. In the
abstract index notation of Wald (1984), the index a appearing on the left hand side would be denoted with a Greek
letter. Since the meaning is clear from the context, we do not make this distinction in the few places that it arises in
this book.

2.7 Choosing basis vectors: the ADM equations 45
and from the normalization condition n
a
n
a
=−1wefind
n
a
= (−α, 0, 0, 0). (2.117)
From the definition of the spatial metric (2.27)wehave
γ
ij
= g
ij
, (2.118)
meaning that the metric on is just the spatial part of the 4-metric. Since zeroth components
of spatial contravariant tensors have to vanish, we also have γ
a0
= 0. The inverse metric
can therefore be expressed as
g
ab
= γ
ab
− n
a
n
b
=
−α
−2
α
−2
β
i
α
−2
β
j
γ
ij
− α
−2
β
i
β
j
. (2.119)
Exercise 2.24 Show that
γ
ik
γ
kj
= δ
i
j
. (2.120)
Equation (2.120) implies that γ
ij
and γ
ij
are 3-dimensional inverses, and can hence be
used to raise and lower spatial indices of spatial tensors. For example, the covariant form
of the shift vector is
β
i
= γ
ij
β
j
. (2.121)
We can now invert (2.119) and find the components of the 4-dimensional metric
g
ab
=
−α
2
+ β
l
β
l
β
i
β
j
γ
ij
. (2.122)
Equivalently, the line element may be decomposed as
ds
2
=−α
2
dt
2
+ γ
ij
(dx
i
+ β
i
dt)(dx
j
+ β
j
dt), (2.123)
which is often refered to as the metric in 3 + 1 form. We may interpret this line element as
the Pythagorean theorem for a 4-dimensional spacetime, ds
2
=−(proper time between
neighboring spatial hypersurfaces)
2
+ (proper distance within the spatial hypersurface)
2
.
This equation thus determines the invariant interval between neighboring points A and B,
as illustrated in Figure 2.4.
Exercise 2.25 Show that the determinant g = det(g
ab
) of the spacetime metric g
ab
can be written as
√
−g = α
√
γ, (2.124)
where γ = det(γ
ij
) is the determinant of the spatial metric γ
ij
.
Hint: Recall that for any square matrix A
ij
the following is true: (A
−1
)
ij
= cofactor
of A
ji
/ det A.
Exercise 2.26 Use equation (2.123) directly to determine the proper time dτ
measured by a clock carried by a normal observer n
a
in a coordinate time interval
dt.
46 Chapter 2 The 3+1 decompostion of Einstein’s equations
x
i
x
i
x
i
+dx
i
A
B
ß
i
dt
n
a
dt
a
t
+
d
t
t
t
a
dt
dx
i
dx
i
+ß
i
dt
dx
a
Figure 2.4 Pythagorean theorem in 3 +1 dimensional spacetime. The normal vector αn
a
and the time vector t
a
connect points on two neighboring spatial slices. The shift vector β
i
resides in the slice and measures their
difference. The infinitesimal displacement vector dx
a
connects two nearby, but otherwise arbitrary, points on
neighboring slices (e.g., the point A at x
i
on slice t and the point B at x
i
+ dx
i
on slice t + dt). The total
displacement vector dx
a
= t
a
dt + dx
i
,wheredx
i
is the spatial vector drawn in the figure, may be decomposed
alternatively into two vectors that form the legs of a right-triangle, dx
a
= (αn
a
dt) + (dx
i
+ β
i
dt), as shown.
Using this decomposition to evaluate the invariant interval ds
2
= dx
a
dx
a
, commonly expanded as in
equation (1.1), yields the Pythagorean theorem, equation (2.123).
The entire content of any spatial tensor is available from their spatial components. This
is obviously true for contravariant components, since their zeroth component vanishes,
but also holds covariant components. Therefore, the entire content of the decomposed
Einstein equations is contained in their spatial components alone, and we can rewrite the
Hamiltonian constraint (2.90),
R + K
2
− K
ij
K
ij
= 16πρ, (2.125)
the momentum constraint (2.96),
D
j
(K
ij
− γ
ij
K ) = 8π S
i
, (2.126)
the evolution equation for the extrinsic curvature (2.106),
∂
t
K
ij
=−D
i
D
j
α + α(R
ij
− 2K
ik
K
k
j
+ KK
ij
) − 8πα(S
ij
−
1
2
γ
ij
(S − ρ))
+β
k
D
k
K
ij
+ K
ik
D
j
β
k
+ K
kj
D
i
β
k
,
(2.127)
and the evolution equation for the spatial metric (2.108),
∂
t
γ
ij
=−2α K
ij
+ D
i
β
j
+ D
j
β
i
. (2.128)
Equations (2.125)–(2.128) are equivalent to Einstein’s equations (2.83) and comprise the
“standard” 3 + 1 equations. Sometimes they are referred to as the “ADM” equations after
Arnowitt, Deser and Misner,
16
even though these equations had been derived earlier,
17
and
even though Arnowitt et al. (1962) derived the equations in a different form.
18
16
Arnowitt et al. (1962).
17
E.g., Darmois (1927); Lichnerowicz (1944); Four
`
es-Bruhat (1956).
18
See, e.g., Anderson and York, Jr. (1998) for a discussion.
2.7 Choosing basis vectors: the ADM equations 47
The shift terms in (2.127) and (2.128) arise from the Lie derivatives L
β
γ
ij
and L
β
K
ij
.
In (2.128) it is convenient to express the Lie derivative in terms of the covariant derivative
D
i
to eliminate the term β
k
D
k
γ
ij
, but in (2.127) the covariant derivatives in the shift terms
may be replaced with the partial derivatives ∂
i
(see Appendix A).
Exercise 2.27 Show that the determinant γ = det(γ
ij
) of the spatial metric and the
trace K = K
i
i
of the extrinsic curvature satisfy the equations
∂
t
ln γ
1/2
=−αK + D
i
β
i
(2.129)
and
∂
t
K =−D
2
α + α
K
ij
K
ij
+ 4π(ρ + S)
+ β
i
D
i
K, (2.130)
where D
2
= γ
ij
D
i
D
j
is the Laplace operator associated with γ
ij
.
Box 2.1 The standard 3 +1 or ADM equations
In the standard 3 +1 decomposition, the metric is written as
ds
2
=−α
2
dt
2
+ γ
ij
(dx
i
+ β
i
dt)(dx
j
+ β
j
dt). (2.131)
Einstein’s equations are then decomposed into the Hamiltonian constraint,
R + K
2
− K
ij
K
ij
= 16πρ, (2.132)
the momentum constraint,
D
j
(K
ij
− γ
ij
K ) = 8π S
i
, (2.133)
the evolution equation for the spatial metric,
∂
t
γ
ij
=−2α K
ij
+ D
i
β
j
+ D
j
β
i
(2.134)
(which is really a definition of the extrinsic curvature), and the evolution equation for the extrinsic
curvature,
∂
t
K
ij
= α(R
ij
− 2K
ik
K
k
j
+ KK
ij
) − D
i
D
j
α − 8πα(S
ij
−
1
2
γ
ij
(S − ρ))
+β
k
∂
k
K
ij
+ K
ik
∂
j
β
k
+ K
kj
∂
i
β
k
. (2.135)
Useful contractions of the two evolution equations are
∂
t
ln γ
1/2
=−α K + D
i
β
i
(2.136)
and
∂
t
K =−D
2
α + α
K
ij
K
ij
+ 4π(ρ + S)
+ β
i
D
i
K, (2.137)
where we have used the Hamiltonian constraint (2.132)inderiving(2.137). The matter source
terms appearing in the above equations are defined by
ρ = n
a
n
b
T
ab
, S
i
=−γ
ij
n
a
T
aj
, S
ij
= γ
ia
γ
jb
T
ab
, S = γ
ij
S
ij
. (2.138)

48 Chapter 2 The 3+1 decompostion of Einstein’s equations
Exercise 2.28 Argue that when treating the weak-field, slow-velocity (Newtonian)
limit of general relativity in nearly inertial coordinates, the lapse function is given
by
α = 1 +, (2.139)
where is the Newtonian gravitational potential (which we assume to vanish at
spatial infinity).
It is instructive to compare the standard 3 + 1 gravitational field equations (2.125)–
(2.128) with Maxwell’s equations of electrodynamics as summarized in Section 2.2.
Evidently, the two sets of equations have a very similar structure. The two 3 + 1evo-
lution equations (2.127) and (2.128) are quite similar to Maxwell’s evolution equations
(2.11) and (2.12) if we identify the vector potential A
i
with the spatial metric γ
ij
and the
electric field E
i
with the extrinsic curvature K
ij
. The right hand sides of both (2.128)and
(2.11) involve a field variable and a spatial derivative of a gauge variable, while the right
hand sides of both (2.127) and (2.12) involve matter source terms as well as second spatial
derivatives of the second field variable (which in 2.127 are hidden in the Ricci tensor).
The constraint (2.5) constrains the divergence of the electric field and can therefore be
identified with the momentum constraint (2.126), which constrains the divergence of the
extrinsic curvature. The most important differences between the two theories are also obvi-
ous: electromagnetism is a linear, vector field theory, while general relativity is a nonlinear,
tensor field theory.
Equations (2.125)–(2.128) represent the spatial components of the corresponding equa-
tions (2.90), (2.96), (2.106) and (2.108). As a further simplification, it turns out that in
evaluating the right hand sides of equations (2.125)–(2.128), which involves expanding
derivatives or evaluating the Ricci tensor R
ij
, we can disregard all components with indices
equal to 0. Expanding the term D
a
D
b
α in (2.106), for example, yields ∂
a
∂
b
α − ∂
c
α
c
ba
.
Here, the index c runs from 0 to 3, even if we restrict a and b to be spatial. From their
definition (2.44) with γ
a0
= 0, it is clear that
0
ba
= 0, (2.140)
so that we can ignore the component with c = 0, and the connection coefficients can be
computed from spatial components alone
i
jk
=
1
2
γ
il
(∂
k
γ
lj
+ ∂
j
γ
lk
− ∂
l
γ
jk
). (2.141)
Similarily, the Ricci tensor R
ij
can be found from the spatial components γ
ij
alone,
R
ij
= ∂
k
k
ij
− ∂
j
k
ik
+
k
ij
l
kl
−
k
il
l
jk
, (2.142)
or, in terms of second derivatives of the metric,
R
ij
=
1
2
γ
kl
∂
i
∂
l
γ
kj
+ ∂
k
∂
j
γ
il
− ∂
i
∂
j
γ
kl
− ∂
k
∂
l
γ
ij
+ γ
kl
m
il
mkj
−
m
ij
mkl
. (2.143)

2.7 Choosing basis vectors: the ADM equations 49
Exercise 2.29 Find the connection coefficients for a spherically symmetric spatial
metric of the form
γ
ij
= ψ
4
η
ij
= ψ
4
diag
1, r
2
, r
2
sin
2
θ
, (2.144)
where the function ψ, which we will refer to as the conformal factor in Chapter 3,
depends on r alone.
Hint: Problem 7.6 in Lightman et al. (1975).
Exercise 2.30 Show that for any spatial vector V
i
, ∇
i
V
j
= D
i
V
j
, but that, in
general, ∇
i
V
j
= D
i
V
j
and ∇
i
V
j
= D
i
V
j
.
Hint: Use equation (2.62).
As a consistency check, it is useful to return to the Schwarzschild spacetime in isotropic
spherical polar coordinates that we considered earlier in Section 2.3. Comparing the
spacetime metric (2.35) with the 3 + 1metric(2.123) we can identify the lapse as
α =
1 − M/(2r)
1 + M/(2r)
(2.145)
(as we have already noted), the shift
β
i
= 0 (2.146)
and the spatial metric
γ
ij
=
1 +
M
2r
4
diag
1, r
2
, r
2
sin
2
θ
. (2.147)
Since γ
ij
is independent of time and β
i
= 0, the evolution equation (2.128) immediately
yields
K
ij
= 0, (2.148)
as we have previously discovered in exercise 2.11. The connection coefficients can be
found from exercise 2.29 with ψ = 1 + M/(2r). The nonvanishing components of the
3-dimensional Ricci tensor are
R
rr
=−
8rM
(2r
2
+ Mr)
2
, R
θθ
=
4r
3
M
(2r
2
+ Mr)
2
, R
φφ
= sin
2
θ R
θθ
. (2.149)
Recall that in vacuum the 4-dimensional Ricci tensor vanishes, of course,
(4)
R
ij
= 0. Here,
however, we are computing the 3-dimensional Ricci tensor R
ij
, which is nonzero.
We can now convince ourselves that this solution indeed satisfies the constraint and
evolution equations (2.125)–(2.128). Taking the trace of the Ricci tensor (2.149) yields
R = 0, as it must to satisfy the Hamiltonian constraint (2.125) with K
ij
= ρ = 0. In
vacuum the momentum constraint (2.126) only involves the extrinsic curvature, which is
zero, so that this equation is satisfied trivially. We have used the evolution equation for
the metric (2.128) to compute the extrinsic curvature, so it is obviously satisfied. The only
50 Chapter 2 The 3+1 decompostion of Einstein’s equations
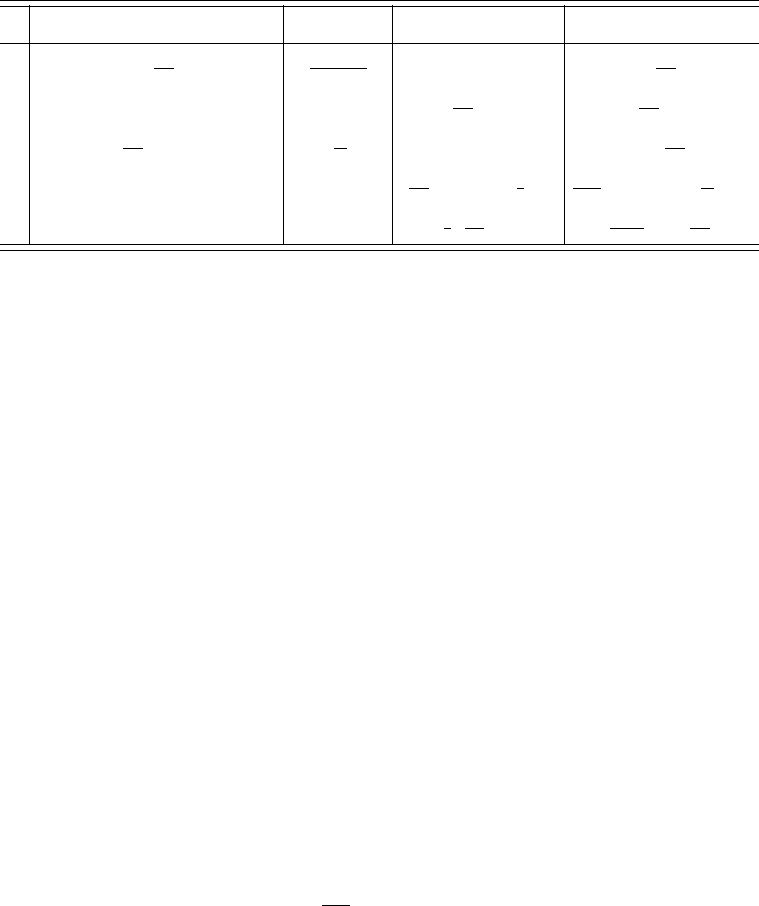
Table 2.1 The lapse α,shiftβ
i
, spatial metric γ
ij
, extrinsic curvature K
ij
and mean curvature K for a
Schwarzschild spacetime in different coordinate systems. Here η
ij
= δ
ij
and l
i
= l
i
= x
i
/r with
r
2
= x
2
+ y
2
+ z
2
in Cartesian coordinates, or η
ij
= diag(1, r
2
, r
2
sin
2
θ)andl
i
= l
i
= (1, 0, 0) in
spherical polar coordinates.
Schwarzschild Isotropic Painlev
´
e–Gullstrand Kerr–Schild
α
1 −
2M
r
1/2
1−M/(2r)
1+M/(2r)
1
1 +
2M
r
−1/2
β
i
00
2M
r
1/2
l
i
2M
r
α
2
l
i
γ
ij
diag
1 −
2M
r
−1
, r
2
, r
2
sin
2
θ
1 +
M
2r
4
η
ij
η
ij
η
ij
+
2M
r
l
i
l
j
K
ij
00
2M
r
3
1/2
η
ij
−
3
2
l
i
l
j
2Mα
r
2
η
ij
−
2 +
M
r
l
i
l
j
K 00
3
2
2M
r
3
1/2
2Mα
3
r
2
1 +
3M
r
nontrivial equation is the evolution equation for the extrinsic curvature (2.127). In addition
to the Ricci tensor (2.149) it involves the second derivatives of the lapse, D
i
D
j
α.
Exercise 2.31 Compute the second derivatives D
i
D
j
α for the Schwarzschild
solution in isotropic coordinates.
Exercise 2.31 demonstrates that the two terms cancel exactly so that ∂
t
K
ij
= 0. This is
not a surprising result, of course, but it is reassuring to see that the formalism works as we
expect.
Identifying the lapse, shift and spatial metric from a given spacetime metric g
ab
is
straightforward whenever the shift vanishes, since the lapse and spatial metric can be
read off immediately from (2.122). For nonzero shift the spatial metric and the covariant
components of the shift β
i
can be identified from (2.122). By inverting the spatial metric
the contravariant components of the shift β
i
can be determined, after which the lapse can
be found from g
00
, again using equation (2.122).
In the following exercises we encourage the reader to work through this formalism for
several well-known solutions to Einstein’s equations. We summarize some of the results
for a Schwarzschild spacetime, expressed in a number of different coordinate systems, in
Table 2.1.
19
Exercise 2.32 In spherical polar Painlev
´
e–Gullstrand coordinates the line element
of a Schwarzschild spacetime is
ds
2
=−dt
2
+
dr +
2M
r
1/2
dt
2
+r
2
(dθ
2
+ sin
2
θdφ
2
). (2.150)
19
In Table 2.1, the column “isotropic” refers to spatial slices of constant Schwarzschild time t represented in an isotropic
spatial coordinate system. Other slices of the Schwarzschild spacetime may also be expressed in isotropic coordinates;
see exercise H.1.