Bayer R.G. Mechanical Wear Fundamentals and Testing, Revised and Expanded
Подождите немного. Документ загружается.

could then be represented as the sum of individual wear processes, for example,
W
total
¼ W
s
-
c
-
d
þ W
r
-
c
-
d
ð4:1Þ
where W
total
is the total wear, W
s-c-d
is the wear due to single-cycle deformation, and W
r-c-d
is the wear due to repeated-cycle deformation. Utilizing the expressions developed for
single-cycle deformation and fatigue wear, Eqs. 3.25 and 3.44, and assuming that a is
the fraction of the real area of contact that is wearing by single-cycle deformation, the
following equation can be proposed for this system:
W
total
¼ 2k
tan y
p
aP
p
S þ OMGG
t
ð1 aÞ P
1þt=3
S ð4:2Þ
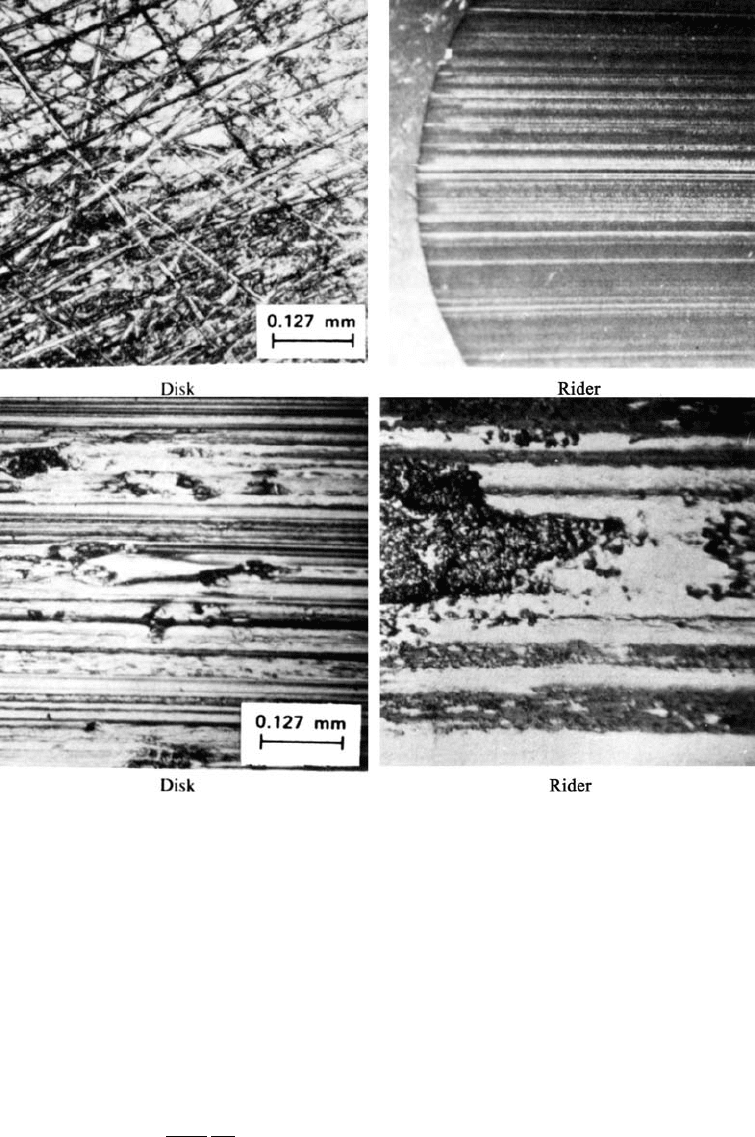
Figure 4.10 Examples of mild and severe wear scar morphologies for sliding. ‘‘Left side’’ shows an
example of mild wear scars obtained in a pin-on-disk test; ‘‘Right side’’ shows severe wear scars.
(From Ref. 80, reprinted with permission from ASME.)
Copyright 2004 by Marcel Dekker, Inc. All Rights Reserved.
Note that in this equa tion, P is the normal load and S is the distance of sliding. The other
symbols are as previously defined for Eqs. (3.25) and (3.44). Sinc e each of the individual
mechanisms do not depend on the same parameters in the same manner, the dependency
of W
total
on these parameters would depend on the relative contribution of the individual
mechanisms to the total wear. For example, if a is very small, that is to say single-cycle
deformation is minor, the load dependency would be nonlinear and the wear behavior
would not be sensitive to the sharpness and size of the asperities. If a was near unity
(i.e., fatigue is minor), the wear would be sensitive to the asperities’ sharpness and the load
dependency would approach a linear one. For intermediate values of a, there would be
both a nonlinear dependency on load and a dependency on asperity size and shape, which
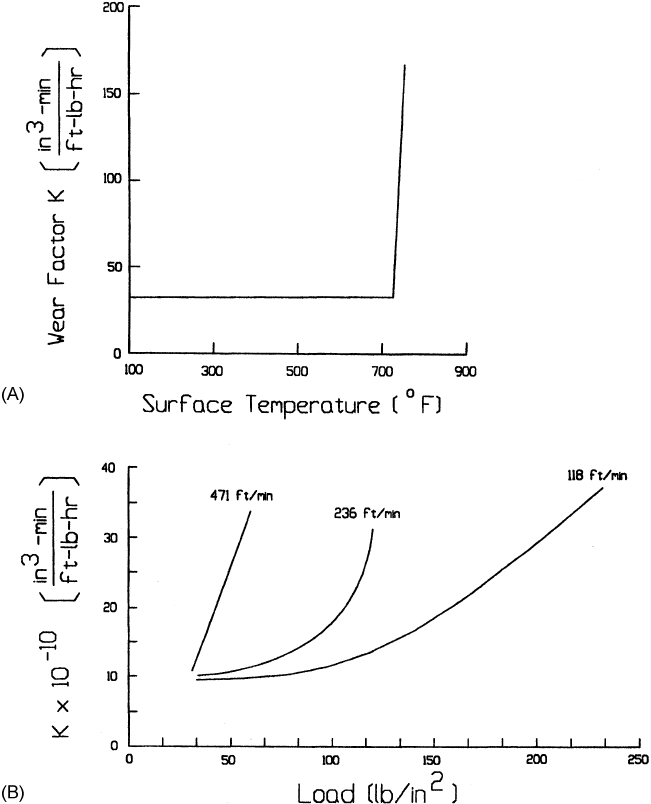
Figure 4.11 Transitions from mild to severe wear in the case of sliding wear of plastics. ‘‘A’’, poly-
imide=steel couple in a thrush washer test; ‘‘B’’, TFE composite=steel couple in a journal bearing
test. (‘‘A’’ from Ref. 23; ‘‘B’’ from Ref. 81.)
Copyright 2004 by Marcel Dekker, Inc. All Rights Reserved.
would be different from the ones associated with e ither mechanism. This trend is illus-
trated in Fig. 4.13, where it is assumed that a can be related to the load range. For light
loads, it was assumed that fatigue is negligible but at high loads, it predominates. Conse-
quently, the possibility of the simultaneous occurrence of several mechanisms can lead to a
wider range of behavior than those based on the individual mechanisms.
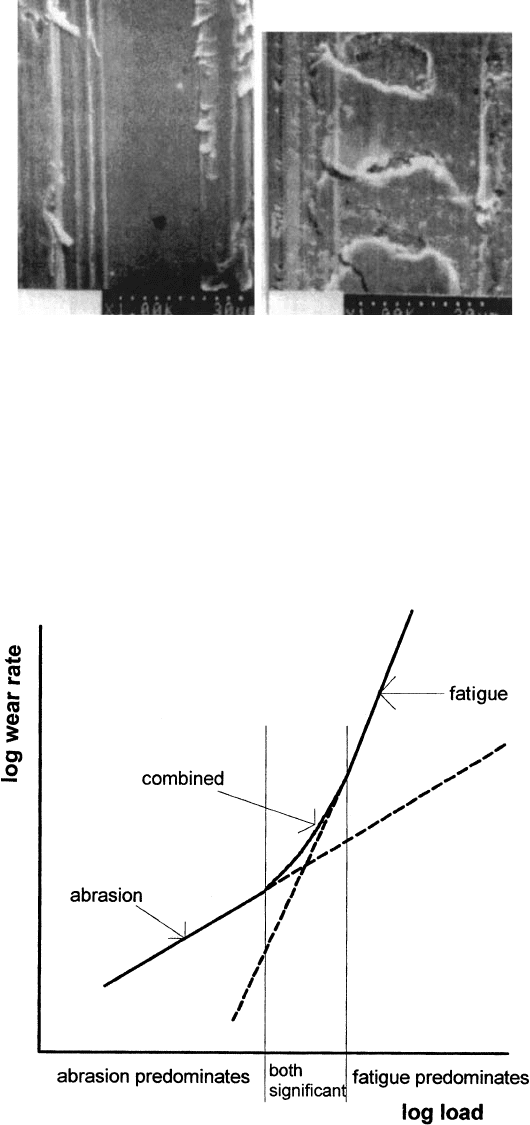
Figure 4.12 Sliding wear scars on ceramics, showing evidence of single-cycle deformation and
repeated-cycle deformation wear. (From Ref. 82; reprinted with permission from ASME.)
Figure 4.13 Example of combined wear behavior when there are two mechanisms present.
Copyright 2004 by Marcel Dekker, Inc. All Rights Reserved.

The individual mechanisms can also interact in a sequential fashion, giving rise to
another possible factor for complex wear behavior. For example, fatigue wear can weaken
the surface by the formation of cracks and allowing an adhesive event to remove the wear
particle. Mathematically, the wear may be described by the equation for adhesive wear,
where the wear coefficient K is now dependent on the fatigue parameters of the system
in addition to the normal parameters associated with adhesion. In Eq. 3.7 for adhesive
wear, K is the probability that a given junction will result in wear. Assuming that this
probability is proportional to the fatigue wear rate (see Eq. (3.4 4)), the following equation
may be proposed for such a system:
W ¼
OMGG
t
P
2þt=3
K
0
3p
S ð4:3Þ
where K
0
is the constant of proportionality. Comparison of this equation with Eq. 3.7 illus-
trates the complexity that the concept of one wear mechanism initiating another intro-
duces. Additional dependencies are introduced (e.g., the fatigue parameter t), and other
dependencies change (e.g., the dependency on load is no longer linear). Another example
of this type of sequential interaction would be either fatigue or adhesive wear mechanisms
forming debris, which then acts as an abrasive.
In considering these ways in which the basic wear mechanisms may interact in a
given situation, two points should be noted. In the case of parallel interaction, modifica-
tion of the parameters effecting one of the wear modes may have little or no effect on the
overall wear behavior. However, in the sequential interaction, it should always have an
effect on the overall behavior. With the first example, changing parameters to reduce fati-
gue wear would have negligible effe ct on the wear in the low load range, where abrasion
predominates. In the seco nd example, the overall wear would be reduced since it would
tend to reduce the effective probability of an adhesive failure. The second point to note
is that it is also possible to have both types of interactions (i.e., parallel and sequential)
occur in a given wear system. This confounded type of interaction can also contribute
to the complex nature of wear behavior.
While such interactions may make it necessary to consider more than one type of
mechanism as significant, it is frequently not necessary to do so. It is generally possible
to consider one mechanism or type of mechanism as being the dominant and controlling
mechanism within limited ranges of tribosystem parameters, as illustrated by the wear
maps discussed in Sec. 3.9. In addition to different wear mechanisms being dominant
mechanisms in different ranges of operating parameters, wear mech anisms also differ in
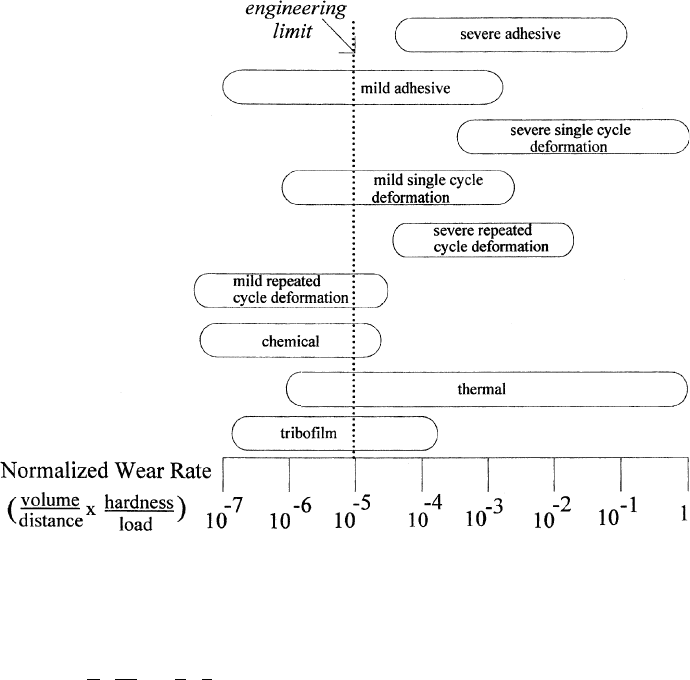
their severity. This is illustrated in Fig. 4.14, where nominal ranges of a normalized and
dimensionless wear rate, O, for different mechanisms for sliding are plotted.
The dimen-
sionless wear rates are based on wear rates from wear situations in which the mechanism is
considered to be the dominan t type. There are several equivalent ways of defining this rate,
which is shown by the following equations:
O ¼
p
P
W
0
¼
p
s
h
0
ð4:4Þ
This wear coefficient, O, is equivalent to the wear coefficient, K, of a linear wear relationship, W ¼
KPS=p, where P is load, S is sliding distance, p is hardness, and W is wear volume.
Copyright 2004 by Marcel Dekker, Inc. All Rights Reserved.
O ¼
p
P
_
WW
v
¼
p
s
_
hh
v
ð4:5Þ
In these equations, W is wear volume; h, wear depth; p, hardness; P, load; v, velocity;
s, contact pressure. The dot indicates wear rate with respect to time and the apostrophe
indicates wear rate with respect to sliding distance. In this figure, the limiting value
for O, which can be tolerated in engineering, is also indica ted. Applications requiring
long life and low wear values often require values of O one to two orders of magnitude
lower than this. It can be seen from this figure that adhesive, severe single-cycle defor-
mation, severe repeated-cycle deformation, and thermal mechanisms tend to be undesi-
rable forms of wear. Wear rates associated with these mechanisms tend to be higher
than those of the other types and generally unacceptable for two reasons. One is their
intrinsic severity, as indicated by the ranges of O. The other is that these forms of wear
tend to occur at higher velocities, pressures and loads than the milder forms of wear,
essentially compounding their undesirability in applications.
There is an overall trend in wear behavior with contact stress. In general, the severity
of wear increases with increasing stress. Not only does the severity of individual wear
mechanism tend to increase with increasing stress, increasing stress tends to lead to the
occurrence of more severe wear mechanisms. Both trends are indica ted in the wear maps
shown in Figs. 3.81–3.83 and in 4.15
. Empirical models for sliding, roll ing, and impact
wear also illustrate such a trend, as well as the general nature of the wear mechanisms.
For many wear situations, it is possible to correlate wear severity with the ratio of a
Figure 4.14 Nominal empirical ranges for normalized wear rates [(wear volume hardness)=
(distance load)] for different types of generic wear mechanisms.
Copyright 2004 by Marcel Dekker, Inc. All Rights Reserved.
contact stress to a strength parameter, such as contact pressure to hardness (30); see
Secs. 3 and Chapter 2 in Engineering Design for Wear: Second Edition, Revised and
Expanded (EDW 2E).
Important corollaries to these two trends are that materials and other design para-
meters should be selected to avoid severe wear mechanisms from occurring and that stress
levels should be reduced as much as possible to minimize wear.
4.3. TRIBOSURFAC ES
Since wear is primarily a surface phenomenon, surface properties are major factors in
determining wear behavior. Changes to surfaces are a frequent factor in transitions in wear
and friction behavior. Before discussing these, it is important to consider the general
nature of a tribosurface. A tribosurface consists of the basic or nominal material of the
surface plus any layers and films that are present. This is illustrated by the schematic
cross-section for a typical metal surface shown in Fig. 4.16. There are numerous surface
properties that are associated with wear and friction that can affect overall behavior
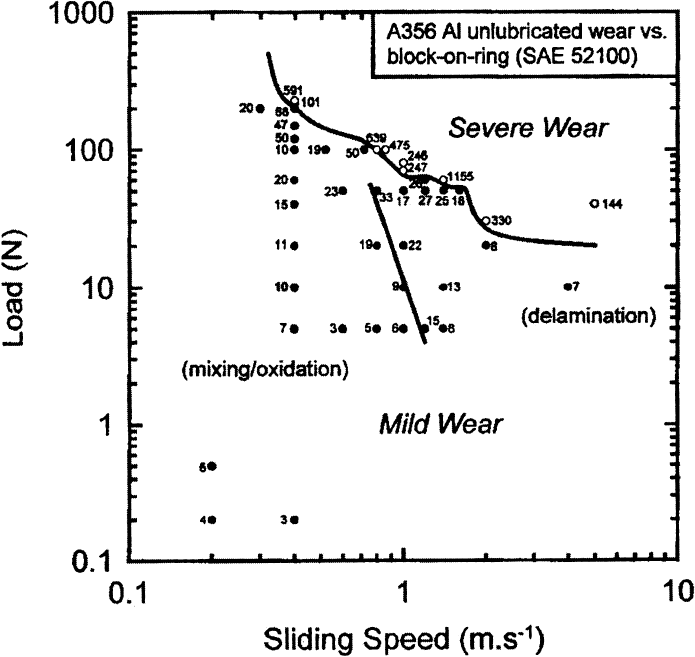
Figure 4.15 Empirical wear rate map for dry sliding wear of an aluminum block against a hard
steel ring. Contact stress increases with load. (From Ref. 80, reprinted with permission from Elsevier
Sequoia S.A.)
Copyright 2004 by Marcel Dekker, Inc. All Rights Reserved.
and cause transitions. The models for the primary wear mechanisms indicate that
geometrical, mechan ical, physical, and chemical parameters are involved. Geometrical
parameters include the overall shape of the contacting surfaces, as well as the distribution
and shapes of asperities. Mechanical parameters would include elastic moduli, hardness,
and fatigue parameters. Physical parameters could be work hardening characteristics,
diffusion constants, and lattice parameters. Composition and polarity of the surface are
examples of chemical factors. Thicknesses and other pro perties of the various layers
and films are additional factors.
While surface parameters influence wear, surface parameters can be influenced by
wear. In effect, this means that wear and surface parameters are mutually dependent
and a stable wear situation would be one in which the surface pro perties do not change
with wear . If the wear process and the set of surface parameters are not mutually consis-
tent, the wear behavior will be unstable until a mutually consistent condition can be estab-
lished. This interdependency means that in addition to identifying the relationships
between wear and the initial parameters of tribosurfaces, as was done in the treatment
of the primary mechanisms, it is necessary to consider how the tribosurface may be modi-
fied as a result of wear. The principle types of mo difications are treated in this section. The
manner in which these modifications can result in transitions in wear behavior is discussed
in the subsequent section.
Wear can cause geometrical changes both on a macro- and micro-scale. On a macro-
scale, the nature of the contact between two bodies changes, effecting the distributions of
stress and load across the contact region. An example of this would be a contact situation,
which initially is a point contact (e.g., a sphere against a plane). As wear occurs, one of the
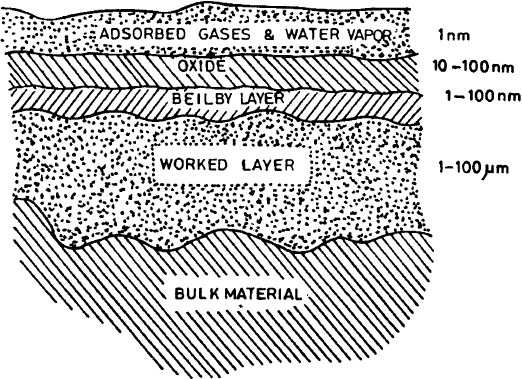
Figure 4.16 Illustration of an unlubricated metal surface. The worked layer is a region of the bulk
material that is worked-hardened as result of maching. The Beilby Layer is an amorphous or micro-
crytalline layer, resulting from melting and surface flow of molecular layers during machining and
hardened by subsequent quenching. While all these layers are typical of most engineering surfaces,
an oxide layer, Beilby Layer, and worked layer may not be present with all metals and maching pro-
cesses. In general, the thickness and properties of these layers depend on the material, environmental
exposure, and maching processes. (From Ref. 84, reprinted with permission from The McGraw-Hill
Companies.)
Copyright 2004 by Marcel Dekker, Inc. All Rights Reserved.
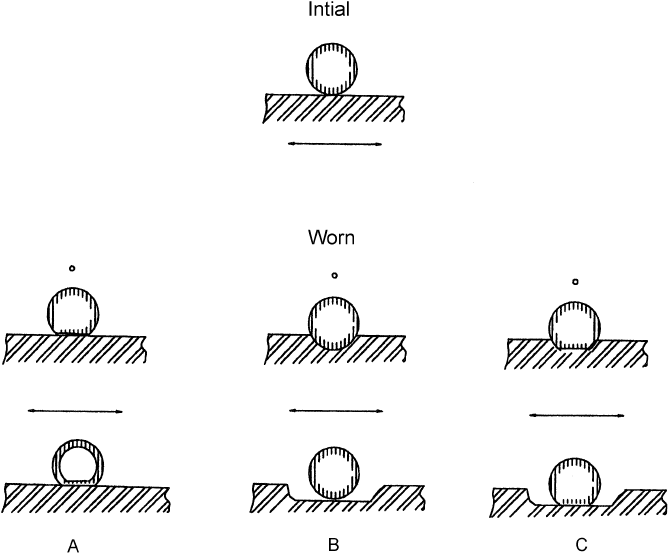
three contact situations indicated in Fig. 4.17 evolves. In two of these cases, the final con-
tact situation is a conforming contact. In the third, ‘‘b’’, it changes from a point contact to
a line contact. This type of change is further illustrated in Fig. 4.18, which shows profilo-
meter traces of a flat surface and a sphere after some wear was produced on the flat sur-
face. Another example of a macro-geometrical change is that which takes place between
two flat surfaces, which are initially misaligned. Initially, the contact is confined to the
region near the edges; with wear, however, contact over the entire surface can be estab-
lished. Such changes are extremely significant in situations in which the wear depends
on stress, such as in mild sliding and impact wear situations (3,31). Such a change is related
to run-in behavior.
One way for micro-geometrical changes to occur is the result of asperity deforma-
tion as a result of contact. An example of this is shown in Fig. 4.19, where a profil-
ometer trace through a wear track on a flat surface is shown. A micrograph of the
surface is also shown. In this case, the tips of the asperities in the worn region appear
to be more rounded; asperity heights appear to be more uniform in the wear track as
well. In general, initial wear in sliding and rolling systems tends to increase the radius
of curvature of the asperities and to provide a more uniform distribution of asperity
heights. These changes tend to increase the number of asperities involved in the contact
as well as to reduce the stress associated with each junction. Initially, the asperity defor-
mation tends to be in the plastic range, while subsequent engagem ents would likely
Figure 4.17 Changes in the contact configuration as a result of wear for a sphere sliding against a
plane. ‘‘A’’, only the sphere wears; ‘‘B’’, only the flat wears; and ‘‘C’’, both the sphere and the flat
wears.
Copyright 2004 by Marcel Dekker, Inc. All Rights Reserved.
result in elastic deformation as a result of these changes. As material is worn from the
surface, the general result is a different micro-geometry or topography, characteristic of
the wear processes involved. An example of this would be the striations that result from
abrasive wear; another might be adhesive wear fragments attached to the surface or the
roughening on the surface caused by erosion. Micrographs illustrating the morphologi-
cal features of worn surfaces are shown in Fig. 4.20 for a variety of conditions. Signifi-
cant changes in surface topography are evident in these micrographs.
In addition to these geometrical changes associated with wear, other changes which
influence the physical and mechanical properties of tribosurfa ces can occur, as can changes
in material composition and structure. An example of these types of changes is the
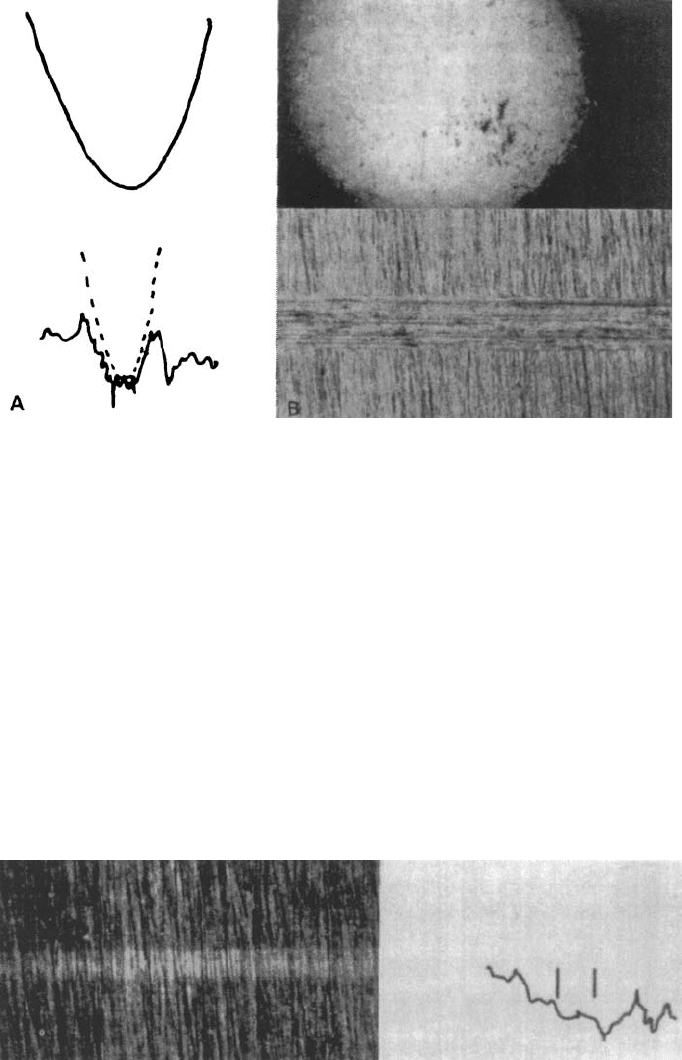
Figure 4.18 (‘‘A’’) Profilometer traces of sphere and a wear scar, produced by the sphere, are
superimposed, illustrating the conforming nature of the worn contact. (‘‘B’’) Micrographs of the
sphere and flat after wear are also shown. (Unlubricated sliding between a 52100 steel sphere and
a 1050 steel flat.) (From Ref. 52, reprinted with permission from Elsevier Sequoia S.A.)
Figure 4.19 An example of asperity modifications in the early stages of wear. The micrograph and
the profilometer trace are for a Monel C Platen, worn by a 52100 steel sphere in lubricated sliding.
The wear track is located between the vertical lines on the trace. (From Ref. 52, reprinted with per-
mission from Elsevier Sequoia S.A.)
Copyright 2004 by Marcel Dekker, Inc. All Rights Reserved.
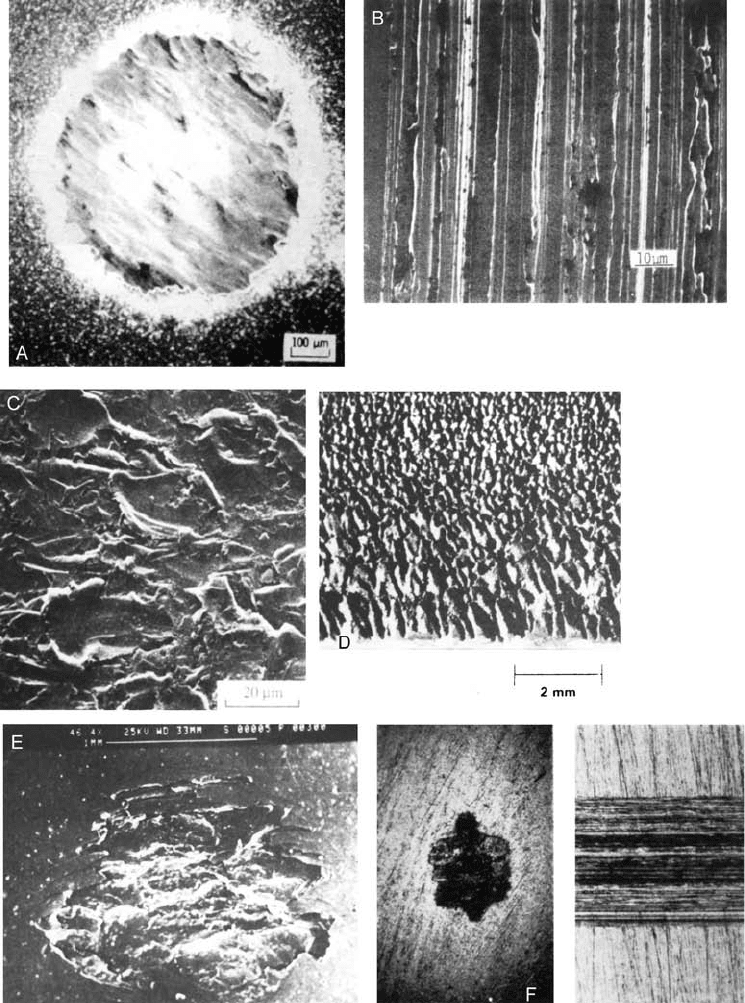
Figure 4.20 Examples of changes in surface topography as a result of wear under different condi-
tions. ‘‘A’’, fretting; ‘‘B’’, sliding; ‘‘C’’, erosion; ‘‘D’’, erosion; ‘‘E’’, rolling; ‘‘F’’, sliding; ‘‘G’’ and
‘‘H’’, compound impact; ‘‘I’’, erosion; ‘‘J’’, slurry erosion. (‘‘A’’ from Ref. 85; ‘‘B’’ from Ref. 83;
‘‘C’’ from Ref. 87; ‘‘D’’ from Ref. 88; ‘‘E’’ from Ref. 89; ‘‘F’’ from Ref. 52; ‘‘G’’ and ‘‘H’’ from
Ref. 3; ‘‘I’’ from Ref. 90; and ‘‘J’’ from Ref. 91. ‘‘A’’, ‘‘B’’, ‘‘E’’, ‘‘I’’, and ‘‘J’’ reprinted with permis-
sion from ASME; ‘‘G’’ and ‘‘H’’ reprinted with permission from Elsevier Sequoia S.A.; and ‘‘C’’ and
‘‘D’’ reprinted with permission from ASM International.)
Copyright 2004 by Marcel Dekker, Inc. All Rights Reserved.