Birge J.R., Louveaux F. Introduction to Stochastic Programming
Подождите немного. Документ загружается.


144 3 Basic Properties and Theory
u(x + n)=u(x) −
n−1
∑
k=0
(1 −F(x + k)) (3.16)
and
v(x + n)=v(x)+
n
∑
k=1
ˆ
F(x+ k)) . (3.17)
Corollary 27. Let ξ be a discrete random variable with support
Ξ
∈ Z.Then
u(x)=
μ
+
−x−
∑
−1
k=x
F(k) if x < 0 ,
μ
+
−x+
∑
x−1
k=0
F(k) if x ≥0 .
Proof: Because
Ξ
∈ Z , F(t)=F(t) ,forall t ∈ ℜ . Hence, u(x)=u(x) for
all x ∈R .Now, u(0)=
μ
+
. Then apply (3.16) to obtain the result.
Corollary 28. Let ξ be a discrete random variable with support
Ξ
∈ Z.Then
v(x)=
μ
−
−
∑
−1
k=x
F(k) if x < 0 ,
μ
−
+
∑
x−1
k=0
F(k) if x ≥ 0 .
Thus, here the finite computation comes from the finiteness of x .
Case d. Finally, we may have a random variable that does not fall in any of the
given categories. We may then resort to approximations.
Theorem 29. Let ξ be a random variable with cumulative distribution function,
F.Then
ˆu(x) ≤ u(x) ≤ ˆu(x)+1 −F(x) . (3.18)
Proof: The first inequality was given in (3.13). Because 1−F(t) is nonincreasing,
we have for any x ∈ ℜ and any k ∈{1, 2,...} that
1 −F(x + k) ≤ 1 −F(t) , t ∈ [x + k −1, x + k) .
Hence,
∞
∑
k=1
(1 −F(x + k)) ≤
∞
x
(1 −F(t)) dt .
Adding 1 −F(x) to both sides gives the desired result.
Theorem 30. Let ξ be a random variable with cumulative distribution function
F . Let n be some integer, n ≥1 . Define

3.3 Stochastic Integer Programs 145
u
n
(x)=
n−1
∑
k=0
(1 −F(x + k)) + ˆu(x + n) . (3.19)
Then
u
n
(x) ≤ u(x) ≤ u
n
(x)+1 −F(x + n) . (3.20)
Proof: The proof follows directly from Theorem 29 and Formula (3.16).
To approximate u(x) within an accuracy
ε
, we have to compute the first n
terms in u(x) ,where n is chosen so that F(x + n) ≥ 1 −
ε
and ˆu(x + n) ,which
involves computing one integral.
Example 10
Let ξ follow a normal distribution with mean
μ
and variance
σ
2
, i.e., N(
μ
,
σ
2
) ,
with cumulative distribution function F and probability density function f .Inte-
grating by parts, one obtains:
u
n
(x)=
n−1
∑
k=0
(1 −F(x + k)) +
∞
x+n
(1 −F(t)) dt
=
n−1
∑
k=0
(1 −F(x + k)) −(x + n)(1 −F(x + n)) +
∞
x+n
tf(t) dt .
Using tf(t)=
μ
f (t) −
σ
2
f
(t) , it follows that
u
n
(x)=
n−1
∑
k=0
(1 −F(x + k)) + (
μ
−x−n)(1 −F(x + n)) +
σ
2
f (x + n) .
Similar results apply for v(x) .
Theorem 31. Let
ξ
be a random variable with cumulative distribution function
ˆ
F(t)=P {
ξ
< t}.Then
ˆv(x) ≤ v(x) ≤ ˆv(x)+
ˆ
F(x) . (3.21)
Let n be some integer, n ≥1 . Define
v
n
(x)=
n−1
∑
k=0
ˆ
F(x−k)+ ˆv(x −n) . (3.22)
Then
v
n
(x) ≤ v(x) ≤ v
n
(x)+
ˆ
F(x −n) . (3.23)
146 3 Basic Properties and Theory
Example 10 (continued)
Let ξ follow an N(
μ
,
σ
2
) distribution, with cumulative distribution function F
and probability density function f .Then
v
n
(x)=
n−1
∑
k=0
F(x−k)+(x −n −
μ
)F(x −n)+
σ
2
f (x −n) .
As a conclusion, expected shortage, expected surplus, and thus simple integer re-
course functions can be computed in finitely many steps either in an exact manner or
within a prespecified tolerance
ε
. Deeper studies of continuity and differentiability
properties of the recourse function can be found in Stougie [1987], Louveaux and
van der Vlerk [1993], and Schultz [1993].
c. Probabilistic constraints
Probabilistic constraints involving integer decision variables may generally be treated
in exactly the same manner as if they involved continuous decision variables. One
need only take the intersection of their deterministic equivalents with the integrality
requirements. The question is then how to obtain a polyhedral representation of this
intersection. This problem sometimes has quite nice solutions.
Example 11: Covering
Consider an example where one can invest in any one of n projects in order to
obtain at least b units of a good. Projects could be mines needed to extract at least
b tons of ore per year, or buildings to let in order to obtain at least b thousands of
rent per year
Let x
i
be the binary variable representing the decision to invest ( x
i
= 1 ) or not
( x
i
= 0 ) in project i . In a deterministic setting, the yield of a project is the quantity
a
i
and the requirement of b units is described by the deterministic constraint
n
∑
i=1
a
i
x
i
≥ b . (3.24)
Now, assume the yields are in fact random. This may come from operational diffi-
culties in a mine or on some floors of the buildings remaining vacant for a period of
time. Then, a typical probabilistic constraint would be
P
n
∑
i=1
ξ
i
x
i
≥ b
≥
α
, (3.25)
3.3 Stochastic Integer Programs 147
where ξ
i
is the random yield of project i .
Due to the binary nature of the decision variables x
i
, this constraint is equivalent
to
P
∑
i∈S
ξ
i
≥ b
≥
α
(3.26)
where S is some subset of {1,...,n} representing the selected projects.
Now, if the random variables ξ
i
follow a Poisson distribution with parameter a
i
,
then ξ
S
=
∑
i∈S
ξ
i
follow a Poisson distribution with parameter
∑
i∈S
a
i
and (3.26)
is equivalent to
P (ξ
S
≥ b) ≥
α
. (3.27)
As b and
α
are given and ξ
S
is known to follow a Poisson distribution, this cor-
responds to finding in the table of the cumulative Poisson distribution the smallest
parameter value for which (3.27) holds. Let B be this value. Then (3.27) is equiva-
lent to
∑
i∈S
a
i
≥ B
or
S
∑
i=1
a
i
x
i
≥ B . (3.28)
Thus, the probabilistic constraint (3.25) has the linear equivalent (3.28). This
linear equivalent has exactly the same form as (3.24) with b replaced by a larger
quantity B .
Example 12
Assume one has five projects with expected yields 2 , 2.5, 4, 4.5, and 7. The
level b = 9 is requested. The deterministic constraint based on expected yields is
2 x
1
+ 2.5 x
2
+ 4 x
3
+ 4.5 x
4
+ 7 x
5
≥ 9 .
The constraint can be satisfied with Project 5 and any other, or by Projects 1, 2 and
4, for instance.
If yields are random and follow a Poisson distribution and if the level of 9 must
be obtained with probability 90%, then a value of B = 13 is found in the Poisson
table and (3.28) gives the linear equivalent:
2 x
1
+ 2.5 x
2
+ 4 x
3
+ 4.5 x
4
+ 7 x
5
≥ 13 .
148 3 Basic Properties and Theory
Example 13: Routing
Let V = {v
1
,v
2
,...,v
n
} be a set of vertices, typically representing customers. Let
v
0
represent the depot and let V
0
= V ∪{v
0
}. A route is an ordered sequence L =
{i
0
= 0,i
1
,i
2
,...,i
k
,i
k+1
= 0}, with k ≤ n , starting and ending at the depot and
visiting each customer at most once. Clearly, if k < n , more than one vehicle is
needed to visit all customers. Assume a vehicle of given capacity C follows each
route, collecting customers’ demands d
i
. If demands d
i
are random, it may turn
out that at some point of a given route, the vehicle cannot load a customer’s demand.
This is clearly an undesirable feature, which is usually referred to as a failure of the
route. A probabilistic constraint for the capacitated routing requires that only routes
with a small probability of failure are considered feasible:
P(failure on any route) ≤
α
, (3.29)
where we note that here and elsewhere we use
α
as an upper bound on a probability
(instead of a lower bound as in (2.1)) in following typical usage in the context.
We now show, as in Laporte, Louveaux, and Mercure [1989], that any route that
violates (3.29) can be eliminated by a linear inequality. For any route L ,let S =
{i
1
,i
2
,...,i
k
} be the index set of visited customers. Violation of (3.29) occurs if
P (
∑
i∈S
d
i
> C) >
α
. (3.30)
Let V
α
(S) denote the smallest number of vehicles required to serve S so that the
probability of failure in S does not exceed
α
, i.e., V
α
(S) is the smallest integer
such that
P (
∑
i∈S
d
i
> C ·V
α
(S)) ≤
α
. (3.31)
Now, let
¯
S denote the complement of S versus V
0
,i.e.,
¯
S = V
0
\S . Then the follow-
ing subtour elimination constraint imposes, in a linear fashion, that at least V
α
(S)
vehicles are needed to cover demand in S :
∑
i∈S, j∈
¯
S or i∈
¯
S, j∈S
x
ij
≥ 2V
α
(S) , (3.32)
where, as usual, x
ij
= 1whenarcij is traveled in the solution and x
ij
= 0other-
wise. It follows that routes that violate (3.29) can be eliminated when needed by the
linear constraint (3.32). Observe that this result is obtained without any assumption
on the random variables. Also observe that (3.32) is not the deterministic equivalent
of (3.29). This should be clear from the fact that an analytical expression for (3.29)
is difficult to write. Finally, observe that in practice, as for many random variables,
the probability distribution of
∑
i∈S
d
i
is easily obtained. The computation of V
α
(S)
in (3.31) poses no difficulty. Additional results appear in the survey on stochastic
vehicle routing by Gendreau, Laporte, and S´eguin [1996].
3.4 Multistage Stochastic Programs with Recourse 149
Exercises
1. Consider the following second-stage integer program:
Q(x,
ξ
)=max{4y
1
+ y
2
| y
1
+ y
2
≤
ξ
x,0 ≤y
1
≤ 2,0 ≤y
2
≤ 1,y integer} .
(a) Obtain y
∗
1
, y
∗
2
,and Q(x,
ξ
) as Gomory functions.
(b) Consider
ξ
= 1.Observethat Q(x,1) is piecewise constant on four pieces
( x < 1, 1≤ x < 2, 2≤ x < 3, 3≤ x ).
(c) Now assume ξ is uniformly distributed over [0, 2] .Obtain Q(x) on four
pieces ( x < 0.5, 0.5 ≤x < 1, 1≤ x < 1.5, 1.5 ≤ x ). Check the noncon-
cavity of Q(x) . Observe that Q (x) is concave on each piece separately,
but that Q(x) is not (compare, e.g., Q(1) to 1/2Q(3/4)+1/2Q(5/4) ).
2. Consider ξ uniformly distributed over [0, 1] and 0 ≤x ≤1.Showthat u(x)+
v(x)=1.
3. Consider ξ uniformly distributed over [0, 2] .
(a) Compute u(x) directly from Definition (3.9) and check with the result in
Example 8. Observe that u(x) is piecewise linear, convex, and continuous.
(b) Compute ˆu(x) .
(c) Show that u(x) − ˆu(x) is decreasing in x .
4. Consider ξ that is Poisson distributed with parameter three. Compute u(3) .
5. (a) Let ξ be normally distributed with mean zero and variance one. What is
the accuracy level of u
3
(0) versus u(0) ?
(b) Let ξ be normally distributed with mean
μ
and variance
σ
2
. Show that
u(
μ
) is independent of
μ
. Is the accuracy of u
n
(
μ
) , n given, increasing
or decreasing with
σ
2
?
6. Consider Example 11. In this example, a probabilistic constraint has a determin-
istic linear equivalent.
(a) Does this also hold if x
i
are integer variables, instead of binary variables?
(b) Does this also hold if the random variables ξ
i
are normally distributed with
mean a
i
and variance
σ
2
i
?
3.4 Multistage Stochastic Programs with Recourse
The previous sections in this chapter concerned stochastic programs with two stages.
Most practical decision problems, however, involve a sequence of decisions that re-
act to outcomes that evolve over time. In this section, we will consider the stochastic
programming approach to these multistage problems. We present the same basic re-
sults as in previous sections. We describe the basic structure of feasible solutions,
150 3 Basic Properties and Theory
objective values, and conditions for optimality. We begin again with the linear, fixed
recourse, finite horizon framework because this model has been the most widely
implemented. We then continue with more general approaches.
We start with implicit nonanticipativity constraints as in the previous sections.
The multistage stochastic linear program with fixed recourse then takes the follow-
ing form (where we note that transposes are suppressed when they are clear from
context to avoid excessive notation):
minz = c
1
x
1
+ E
ξ
2
[minc
2
(
ω
)x
2
(
ω
2
)+···+ E
ξ
H
[minc
H
(
ω
)x
H
(
ω
H
)]...]
s. t. W
1
x
1
= h
1
,
T
1
(
ω
2
)x
1
+W
2
x
2
(
ω
2
)=h
2
(
ω
) ,
···
.
.
.
T
H−1
(
ω
H
)x
H−1
(
ω
H−1
)+W
H
x
H
(
ω
H
)=h
H
(
ω
) ,
x
1
≥ 0; x
t
(
ω
t
) ≥ 0 , t = 2,...,H ;
(4.1)
where c
1
is a known vector in ℜ
n
1
, h
1
is a known vector in ℜ
m
1
,
ξ
t
(
ω
)
T
=
(c
t
(
ω
)
T
,h
t
(
ω
)
T
,T
t−1
1·
(
ω
),...,T
t−1
m
t
·
) is a random N
t
-vector defined on (
Ω
,
Σ
t
,P)
(where
Σ
t
⊂
Σ
t+1
)forall t = 2,...,H , and each W
t
is a known m
t
×n
t
matrix.
The decisions x depend on the history up to time t , which we indicate by
ω
t
.We
also suppose that
Ξ
t
is the support of ξ
t
.
For the financial planning problem in Section 1.2, these parameters are:
c
t
(
ω
)=0,t = 1,...,H −1;
c
H
(
ω
)=(q,−r);
W
t
= e
T
I
,t = 1,...,H −1;
W
H
=[1 −1],t = 1,...,H −1;
T
t
= −
ξ
(
ω
t
)
T
,t = 1,...,H;
h
1
= b;
h
t
= 0,t = 1,...,H −1;
h
H
= −G.
We first describe the deterministic equivalent form of this problem in terms of a
dynamic program. If the stages are 1 to H , we can define states as x
t
(
ω
t
) . Noting
that the only interaction between periods is through this realization, we can define a
dynamic programming type of recursion. For terminal conditions, we have:
Q
H
(x
H−1
,
ξ
H
(
ω
)) = minc
H
(
ω
)x
H
(
ω
)
s. t. W
H
x
H
(
ω
)=h
H
(
ω
) −T
H−1
(
ω
)x
H−1
,
x
H
(
ω
) ≥ 0 .
(4.2)

3.4 Multistage Stochastic Programs with Recourse 151
For the financial planning problem in Section1.2,given x
H−1
and
ξ
H
(
ω
) ,(4.2)
has an optimal solution given by
x
H
(
ω
)=(y(
ω
),w(
ω
)) = ((G −
ξ
H
(
ω
)
T
x
H−1
(
ω
))
+
,(
ξ
H
(
ω
)
T
x
H−1
(
ω
) −G)
+
).
Solutions for other stages can be obtained with a backward recursion, let-
ting Q
t+1
(x
t
)=E
ξ
t+1
[Q
t+1
(x
t
,
ξ
t+1
(
ω
))] for all t to obtain the recursion for
t = 2,...,H −1,
Q
t
(x
t−1
,
ξ
t
(
ω
)) = minc
t
(
ω
)x
t
(
ω
)+Q
t+1
(x
t
)
s. t. W
t
x
t
(
ω
)=h
t
(
ω
) −T
t−1
(
ω
)x
t−1
,
x
t
(
ω
) ≥ 0 ,
(4.3)
where x
t
indicates the state of the system. Other state information in terms of the
realizations of the random parameters up to time t should be included if the dis-
tribution of ξ
t
is not independent of the past outcomes. In the financial planning
case, the value function, Q
t+1
(x
t
) , represents the expected utility of choosing the
asset allocations given by x
t
in the t th period and choosing optimal allocations in
all subsequent periods.
The value we seek is:
minz = c
1
x
1
+ Q(x
1
)
s. t. W
1
x
1
= h
1
,
x
1
≥ 0 ,
(4.4)
which has the same form as the two-stage deterministic equivalent program. The
examples of this formulation in Chapter 1 for financial planning and capacity expan-
sion could then be re-cast as two-stage problems if the second-stage value function
Q(x
1
) can be found.
We would again like to obtain properties of the problems in (4.2)–(4.4) that allow
uses of mathematical programming procedures such as decomposition. We concen-
trate first on the form of the feasible regions for problems (4.3). Let these be
K
t
= {x
t
| Q
t+1
(x
t
) < ∞} .
We have the following result which helps in the development of several algorithms
for multistage stochastic programs.
Theorem 32. The sets K
t
and functions Q
t+1
(x
t
) are convex for t = 1,...,H −1
and, if
Ξ
t
is finite for t = 1,...,H,then K
t
and Q
t+1
(x
t
) are polyhedral.
Proof: Proceed by induction. Because Q
H
(x
H−1
,
ξ
H
(
ω
)) is convex for all
ξ
H
(
ω
) ,
so too is Q
H
(x
H−1
) . We can then carry this back to each t < T −1.Thesameap-
plies for the polyhedrality property because finite numbers of realizations lead to
each Q
t+1
(x
t
) ’s being the sum of a finite number of polyhedral functions, which is
then polyhedral.
152 3 Basic Properties and Theory
We note that we may also describe the feasibility sets K
t
in terms of intersections
of feasibility sets for each outcome if we have finite second moments for ξ
t
in each
period. This result is also true when we have a finite number of possible realizations
of the future outcomes. In this case, the set of possible future sequences of outcomes
are called scenarios.
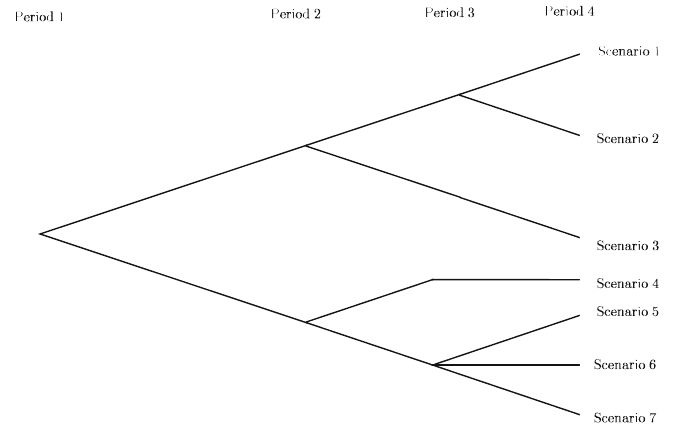
The description of scenarios is often made on a tree such as that in Figure 4.
Here, there are seven scenarios that are evident in the last stage ( H = 4 ). In previous
stages ( t < 4 ), we have a more limited number of possible realizations, which we
call the stage t scenarios. Each of these period t scenarios is said to have a single
ancestor scenario in stage ( t −1 ) and perhaps several descendant scenarios in stage
( t + 1 ). We note that different scenarios at stage t may correspond to the same ξ
t
realizations and are only distinguished by differences in their ancestors.
Fig. 4 A tree of seven scenarios over four periods.
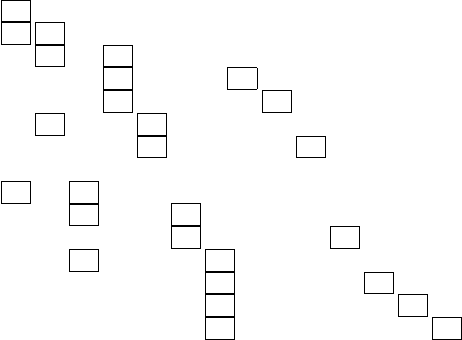
The deterministic equivalent program to (4.1) with a finite number of scenar-
ios is still a linear program. It has the structural form indicated in Figure5,where
subscripts indicate different scenario realizations for the T
t
matrices. This is often
called arborescent form and can be exploited in large-scale optimization approaches
as in Kallio and Porteus [1977]. A difficulty is still, however, that these problems
become extremely large as the number of stages increases, even if only a few real-
izations are allowed in each stage.
In some problems, however, we can avoid much of this difficulty if the interac-
tions between consecutive stages are sufficiently weak. This is the case in the ca-
pacity expansion problem described in Section 1.3. Here, capacity carried over from
3.4 Multistage Stochastic Programs with Recourse 153
W
1
T
1
1
T
1
2
W
2
T
2
1
T
2
2
W
2
T
2
3
T
2
4
W
3
T
3
1
T
3
2
W
3
T
3
3
W
3
T
3
4
W
3
T
3
5
T
3
6
T
3
7
W
4
W
4
W
4
W
4
W
4
W
4
W
4
Fig. 5 The deterministic equivalent matrix for a problem with seven scenarios in four periods.
one stage to the next is not affected by the demand in that stage. Decisions about
the amount of capacity to install can be made at the beginning and then the future
only involves reactions to these outcomes. Problems with this form are called block
separable as mentioned in Section 1.3. Formally, we have the following definition
for block separability (see Louveaux [1986]).
Definition 33. A multistage stochastic linear program (4.1) has block separable
recourse if for all periods t = 1,...,H and all
ω
, the decision vectors, x
t
(
ω
) ,
can be written as x
t
(
ω
)=(w
t
(
ω
),y
t
(
ω
)) where w
t
represents aggregate level
decisions and y
t
represents detailed level decisions. The constraints also follow
these partitions:
1. The stage t objective contribution is c
t
x
t
(
ω
)=r
t
w
t
(
ω
)+q
t
y
t
(
ω
) .
2. The constraint matrix W
t
is block diagonal:
W
t
=
W
t
0
0 T
t
. (4.5)
3. The other components of the constraints are random but we assume that for
each realization of
ω
,T
t
(
ω
) and h
t
(
ω
) can be written:
T
t
(
ω
)=
R
t
(
ω
) 0
S
t
(
ω
) 0
and h
t
(
ω
)=
b
t
(
ω
)
d
t
(
ω
)
, (4.6)
where the zero components of T
t
correspond to the detailed level variables.
To put the capacity expansion problem in Section 1.3 into this framework, we
keep information about the the installed capacity from the current and previous