Благовещенский С.Н., Холодилин А.Н. Справочник по статике и динамике корабля. Динамика корабля. Том 2
Подождите немного. Документ загружается.

Для^«61/1-4
имеем
1; Г (1/2) = ]Ая; Г(0)=-оо.
Остальные значения гамма-функции приведены в приложении 2.
Спектры
волнения 12-й МКОБ и 2-го
МКПС
приведены в табл. 1.6 и 1.7 соот-
ветственно.
При
вычислении спектра 2-го
МКПС
принято
3,92
+
0,383/i
30/
q
=
V+
143
для а>0пр:
«ар-
(а) = 0 для а <g а
пр
O,1125/z
30/o
+2,25
глава
ОБЩИЕ
УРАВНЕНИЯ
НАЧКИ СУДНА
§ 4.
СИСТЕМЫ
КООРДИНАТ. ОБЩИЕ
УРАВНЕНИЯ
Движущееся на взволнованной поверхности моря судно
можно
рассматривать
как
абсолютно твердое тело с шестью степенями свободы. При расчетах качки судна
применяют три системы прямоугольных координат: неподвижную и две подвижные.
Неподвижная
система координат Ох^т]^! имеет плоскость 0
1
|
1
т]
1
, совпадающую
с невозмущенной поверхностью жидкости, а ось 0
1
£
1
направлена вертикально вниз.
Первая
подвижная система координат 0£г)£ имеет плоскость
Ogrj,
совпадающую
с плоскостью O^jT)!, а ось 0£ направлена вертикально вниз, начало координат О
движется с постоянной скоростью v, равной скорости движения судна, ось 0\ сов-
падает с направлением этой скорости и составляет
угол
8 с осью 0^. Вторая по-
движная система координат жестко связана с судном. В Зависимости от решаемых
задач начало этой системы
берут
либо в точке пересечения диаметральной
ПЛОСКОСТИ
хОг, плоскости ГВЛ (хОу) и плоскости мидель-шпангоута (уОг),
тогда
система
Охуг;
либо в центре тяжести судна G,
тогда
Gxyz;
либо так, что ось Ог проходит через-
центр тяжести и направлена вниз. Обе подвижные системы должны совпадать в по-
ложении равновесия судна в жидкости. Поэтому в случае, когда начало координат
принимается
в центре тяжести судна, вводят еще одну систему координат, либо
предполагают, что центр тяжести лежит в плоскости ГВЛ.
Переход от неподвижной к первой подвижной системе координат осуществляете»
по
формулам
Si = (S + of) cos e — т) sin ej
% =
Г\
COS 8 + (g
•+
Of) Sin 8J
где»—средняя величина скорости прямолинейного поступательного движения судна
t — время, прошедшее о момента совпадения точки O
t
с точкой О, в —
угол
между
осями
0^! и 01.
21
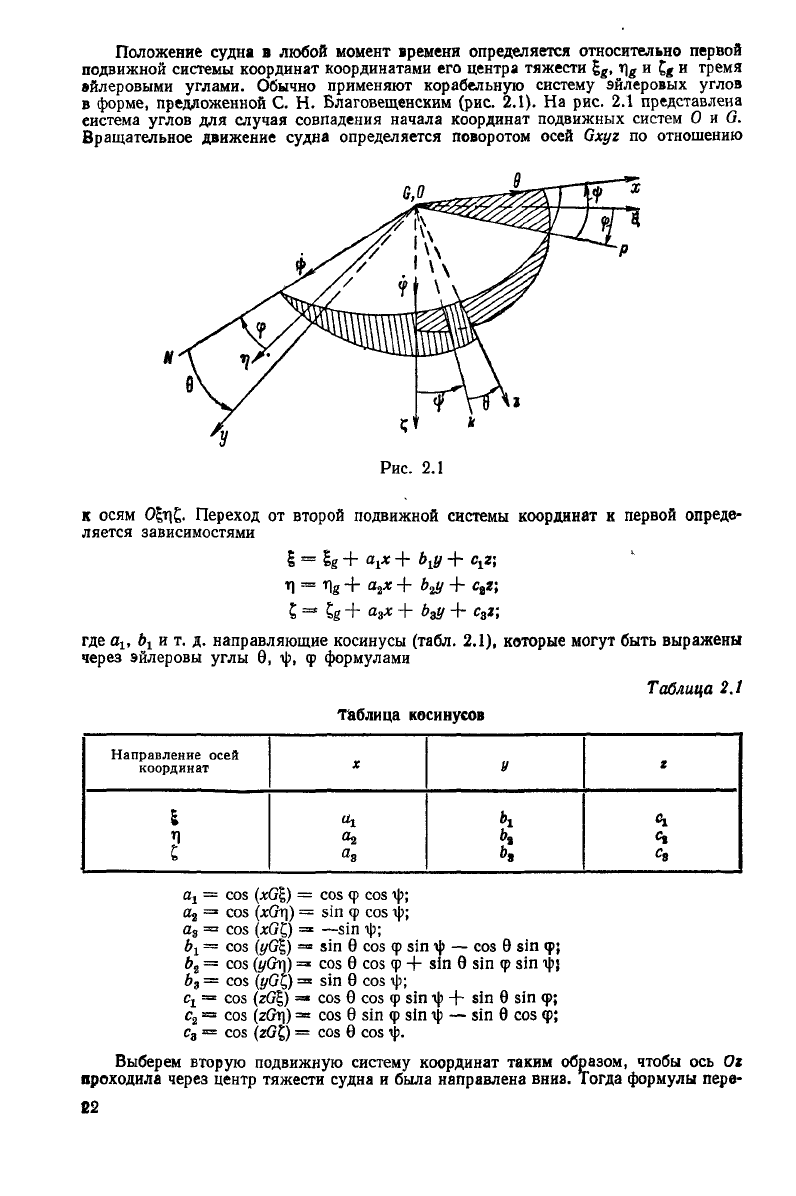
Положение судна в любой момент времени определяется относительно первой
подвижной системы координат координатами его центра тяжести £
g
, r\
g
и tg и тремя
вйлеровыми углами. Обычно применяют корабельную систему эйлеровых
углов
в
форме, предложенной С. Н. Благовещенским (рис. 2.1). На рис. 2.1 представлена
система
углов
для случая совпадения начала координат подвижных систем О и G.
Вращательное движение судна определяется поворотом осей
Gxt/г
по отношению
6,0
_
Рис.
2.1
к
осям О£т)£. Переход от второй подвижной системы координат к первой опреде-
ляется зависимостями
l—tg+a
1
x+
b
t
y + C&
Л = % + V + Ь$+ с
г
г\
£ =» l
g
+ а
а
х +
ЬзУ
+ с
3
г;
где a
lt
b
1
и т. д. направляющие косинусы (табл. 2.1), которые
могут
быть выражены
через эйлеровы
углы
0, г|), <р формулами
Таблица
2.1
Таблица косинусов
Направление
осей
координат
1
a
s
у
h
ь,
а
г
= cos (xG^) = cos
q>
cos i|);
0%
= cos
(xGrf)
= sin ф cos ij);
a
3
= cos (xGQ
=•
—sin
\p;
b
x
= cos
(yGB,)
=« sin 9 cos <p sin i|) — cos 0 sin q>;
Ь
г
= cos (уОц) = cos 6 cos ф 4- sin 9 sin <p sin ф)
b
3
= cos (yQt) = sin 8 cos -ф;
c
x
= cos (zG\) =* cos 0 cos ф sin a|) + sin 9 sin ф;
c
2
= cos
(ZGTJ)
== cos 0 sin ф sin ij) — sin 9 cos ф;
c
3
= cos (zGJ) = cos 9 cos ij).
Выберем
вторую
подвижную систему координат таким образом, чтобы ось Ог
проходила через центр тяжести судна и была направлена вниа. Тогда формулы пере-
22
кода для подвижных систем координат имеют вид
I
= |
g
+ х cos ф cos i|>
•+•
у (sin 6 cos ф sin ty — cos 9 sin ф) + (г — г
0
) X
X (cos 0 cos ф sin i|) + sin 9 sin ф);
4 = T)g + x sin ф cos г|э + у (cos 9 cos ф + sin 0 sin ф sin i|>) + (z — z
0
) X
X (cos 9 sin ф sin \p — sin 9 cos ф); (2.Ц
£ = £
g
— * sin v|> + у sin 9 cos ф + (z — z
p
) cos 0 cos i|);
* = (i — Sg) cos ф cos г|) + (Л — Tig) sin ф cos
я|>
— (£ — £
g
) sin г|>;
0 = (S — eg) (sin 9 cos ф sin ty — cos 0 sin ф) + On — 1g) (cos 0 cos ф +
+
sin 0 sin ф sin i])) + (£ — £g) sin 0 cos t|); (2.2>
г = г
р
+ (| — £g) (cos 0 cos ф sin г|) + sin 0 sin ф) +
+
(т) — T)g) (cos 0 sin ф sin if — sin 0 cos ф) + (£ — £g) cos 9 cos i|)),
где |g, Ti
g
, Jg — координаты центра тяжести судна в первой подвижной системе
координат, г
р
— аппликата центра тяжести во второй подвижной системе (г
р
= О
тогда,
когда центр тяжести расположен в плоскости ватерлинии равновесия).
При
проведении практических расчетов обычно применяют разложение синусов^
в
косинусов эйлеровых
углов
в ряды
8
ш*
=
тг
_
3!
5!
X
2
X
1
г
В
случае
наклонений на малые
углы
синусы заменяют их значениями, а коси-
нусы принимают равными 1. Это первое приближение, широко применяемое при
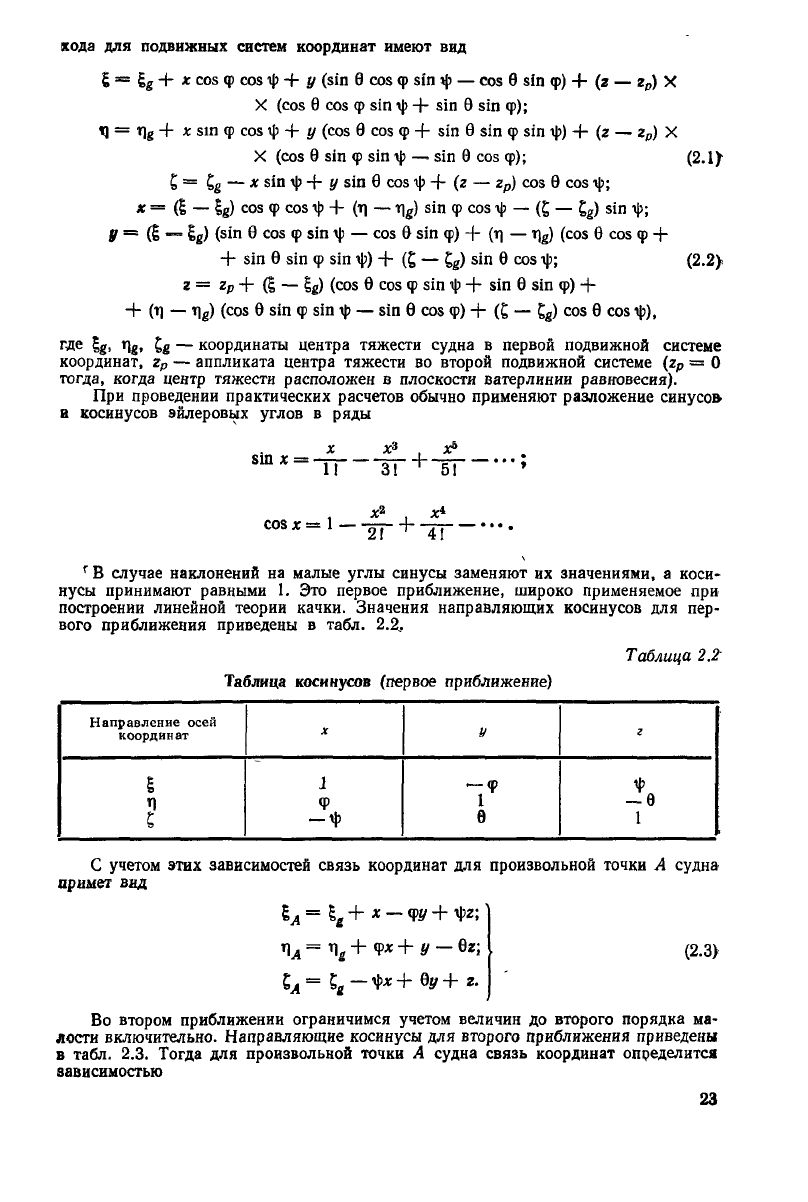
построении линейной теории качки. Значения направляющих косинусов для пер-
вого приближения приведены в табл. 2.2,
Таблица
2.2
Таблица косинусов (первое приближение)
Направление
осей
координат
1
п
С
j
ф
У
-ф
1
е
— 9
1
С
учетом
этих зависимостей связь координат для произвольной точки А судна
примет вид
=
l
t
+ х — фу + г|>г;
=
•Hg
+ Ф* + У — 6*;
(2.3>
Во втором приближении ограничимся
учетом
величин до второго порядка ма-
лости включительно. Направляющие косинусы для второго приближения приведены
в
табл. 2.3. Тогда для произвольной точки А судна связь координат определится
зависимостью
23
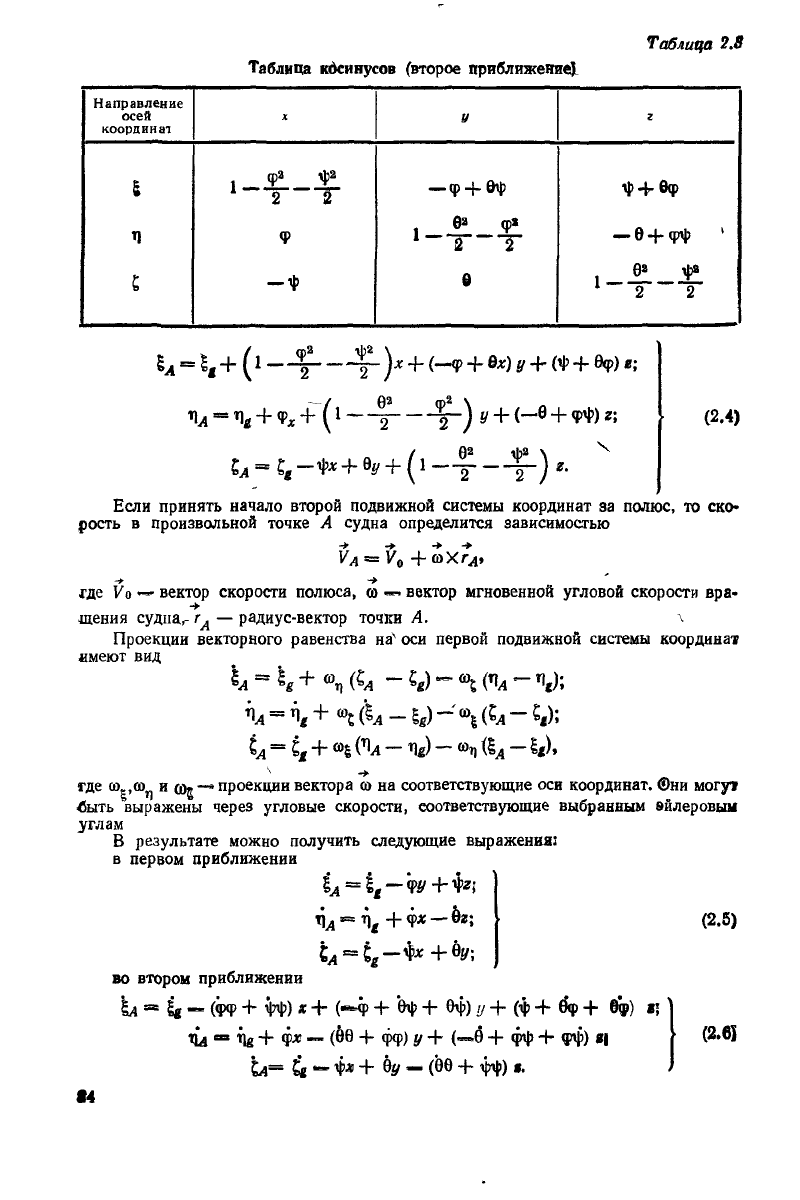
Таблица
2.8
Таблица кбсинусов (второе приближение)
Направление
осей
координат
6
Л
С
1
X
ф2
2
Ф
— 1
2
У
1
2 2~
е
1
г
—
в-
ф2
2
<.+("--*-?•)•
•('-•?-¥-)*
X
(2.4)
Если принять начало второй подвижной системы координат за полюс, то ско-
рость в произвольной точке А судна определится зависимостью
где Vo — вектор скорости полюса, со — вектор мгновенной угловой скорости вра-
щения
судна
г
г
д
— радиус-вектор точки А. \
Проекции
векторного равенства на
4
оси первой подвижной системы координат
имеют вид
- У -
ш
|
&4
- С,);
4
-• _
где
«-,<»„
и и, — проекции вектора <в на соответствующие оси координат, ©ни
могу»
быть выражены через
угловые
скорости, соответствующие выбранным эйлеровым
углам
В
результате
можно получить следующие выражения;
в
первом приближении
во втором приближении
\А
* h —
(ФФ
+
<И>)
*+
TU
—
4g
+ ф* —
фф)
у + (—ё +
ф1|)
+
(2.6)
(2.61
•4
Как
видно из рис. 2.1,
углы
9, gON и zOk находятся в одной плоскости, к ко-
торой перпендикулярна ось Ох, поэтому вектор 6
следует
направить по оси Ох.
Линия
узлов ON, образованная пересечением координатных плоскостей %Оц и уОг,
перпендикулярна плоскости t,Ox в которой измеряются
углы
1);, рОх и £О£, поэтому
вектор ф направлен по линии ON.
Угол
ф лежит в плоскости |Оп (.также
углы
ЪРр
и
NOr\), а вектор ф направлен по оси 0£, перпендикулярной этой плоскости. Оче-
видно,
что проекции вектора угловой скорости а, <в., <в и о. направлены соответ-
ственно по осям 01, 0г\ и О£. Согласно рис. 2.1 имеем
©j
= 9 cos г|) cos ф — ф sin\q>;
<a,l
= 4 cos ф — б sin i|) cos ф|
ш
5
= <р — 9 sin ф.
Фтсюда:
Первое приближение Второе приближение
©1
в
Аналогично можно получить проекции вектора угловой скороота со на оси
связанной
с судном системы координат
Охдг
(й
х
=
9— ф sin ф;
а>
д
= ij) cos 9 + ф cos t|) sin 8j
<о
г
= ф cos 9 cos
-ф
— ф sin в.
Соответственно имеем:
Первое приближение Второе приближение
©
г
= ф = cog. со
г
== ф
—•
ф9.
Векторное выражение для ускорения произвольной точки А судна имеет вид
где а)д
*->>
вектор ускорения точки, е «• вектор
углового
ускорения.
Проекции
вектора ускорения на оси координат 0£т]£
дадут
следующие выраже-
ния:
1А
= Ig
23
Первое
приближение
+
2вф)
</
+
Ф
+
в?
+
Фв
+
2в<р)
г;
fc»
=l"
g
-^x +
By
—
("ев
+
в»
+
фф
+1
2
)
г.
Учитывая, что направление координатных осей связанной с судном системы
•координат меняется, и это затрудняет определение проекции ускорений на коорди-
натную ось как производную по времени от проекции скорости и ускорения точки,
имеем
VAX = Vgx — (O
z
y +
<Dj,ZJ
Улу = V
gy
— ш*г + е>
г
х;
VAZ
= Vgz —
v>yx
+ <o
x
y.
Здесь проекции скорости центра тяжести и проекции вектора мгновенной
утло-
«вой
скорости определяются известными формулами
Ш
2
= Ш|С, + (О^ +
Сй£С
3
.
Тогда для первого приближения
VAX
= ig + m
g
—
4>Ce
— W +
V%, = i]g — ф1в + e?
g
— Вг +
Если проекции скоростей центра тяжести судна малы, то вторые и третьи члены
выражений
будут
малыми второго порядка малости и
могут
быть исключены в пер-
.вом приближении.
Для второго приближения
Vte= Is ^
V
Ay
= hg ~
-
(в
-
V*)
г +
(Ф
-
х\
•56
Проекции
ускорений (направляющие косинусы не дифференцируются) имеют
вид:
в первом приближении
во втором приближении
WAx
= Ig + ФЛй - *Ь ~ 4"
(ф
*
_ (ip _ e$ - 2&ф) у + (ф + 6<p + 29ф) *;
— (G — фчр — 2iH>) г + (Ф — фв) х;
—g-(в»-
— (* +
фв)
* +
(**—ФЧ>)
У-
Эти формулы
дают
проекции скоростей и ускорений фиксированной точки-
судна. В первом приближении они линейные функции, а во втором приближении
образуют многочлены второго порядка относительно углов,
угловых
скоростей
и
угловых
ускорений судна при качке.
Линейную систему уравнений движения судна, имеющего шесть степеней сво-
боды, в общем виде можно записать следующим образом:
C
2lig
+
(2.9>
a
44
в
+
fc
44
e
+
c
44
6
+
t +
c
61
l
s
+a
M
r\g
+
6
52
iig
+ c
62
T]
g
+
a
B8
jg
+ *„& +
c
63
£
g
+
fc
54
e
+ ф ф i
2?
•где
Ri, /?
я
, /?j — проекции вектора внешних сил, Afg, Л?_, М» —' проекции
век»
тора момента внешних сил.
Неизвестными
в этой системе являются координаты центра тяжести g
g
, t)
g
, £g
и
три эйлерова
угла
9, if, q>.
В первом приближении можно считать эйлеровы
углы
в, •ф, <р совпадающими
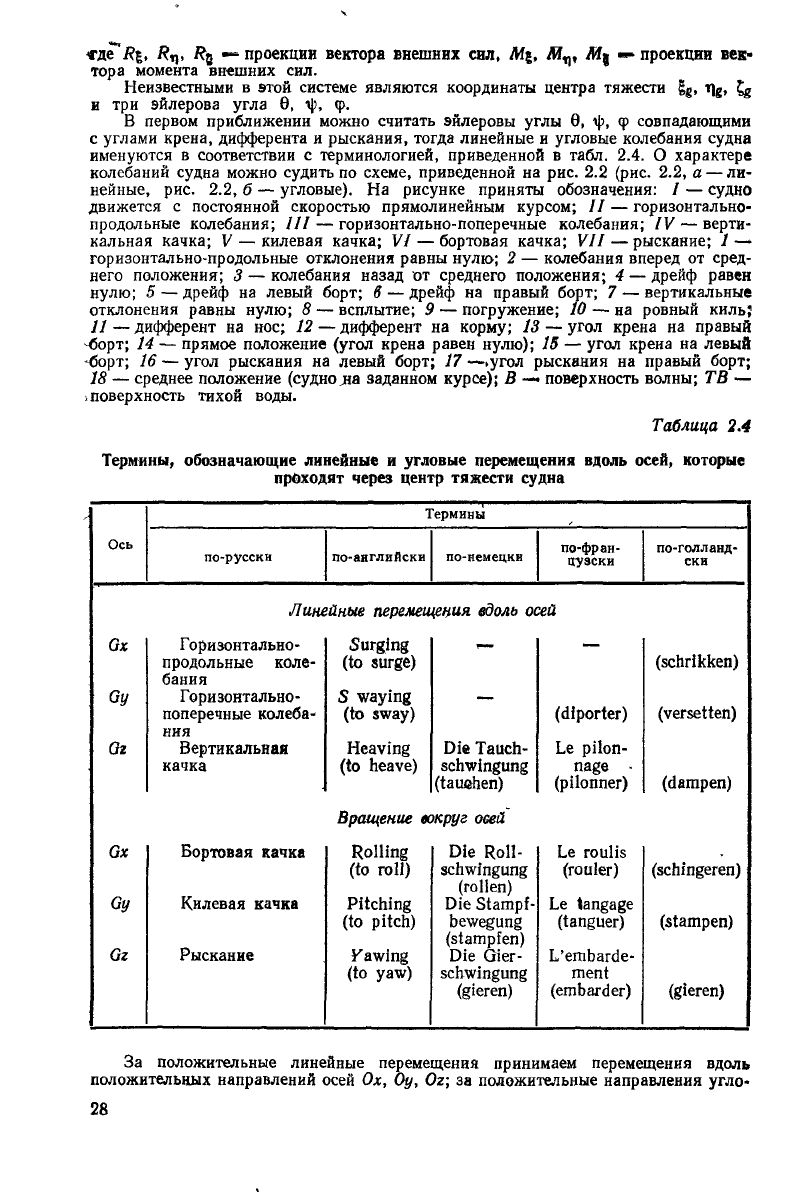
с углами крена, дифферента и рыскания, тогда линейные и угловые колебания судна
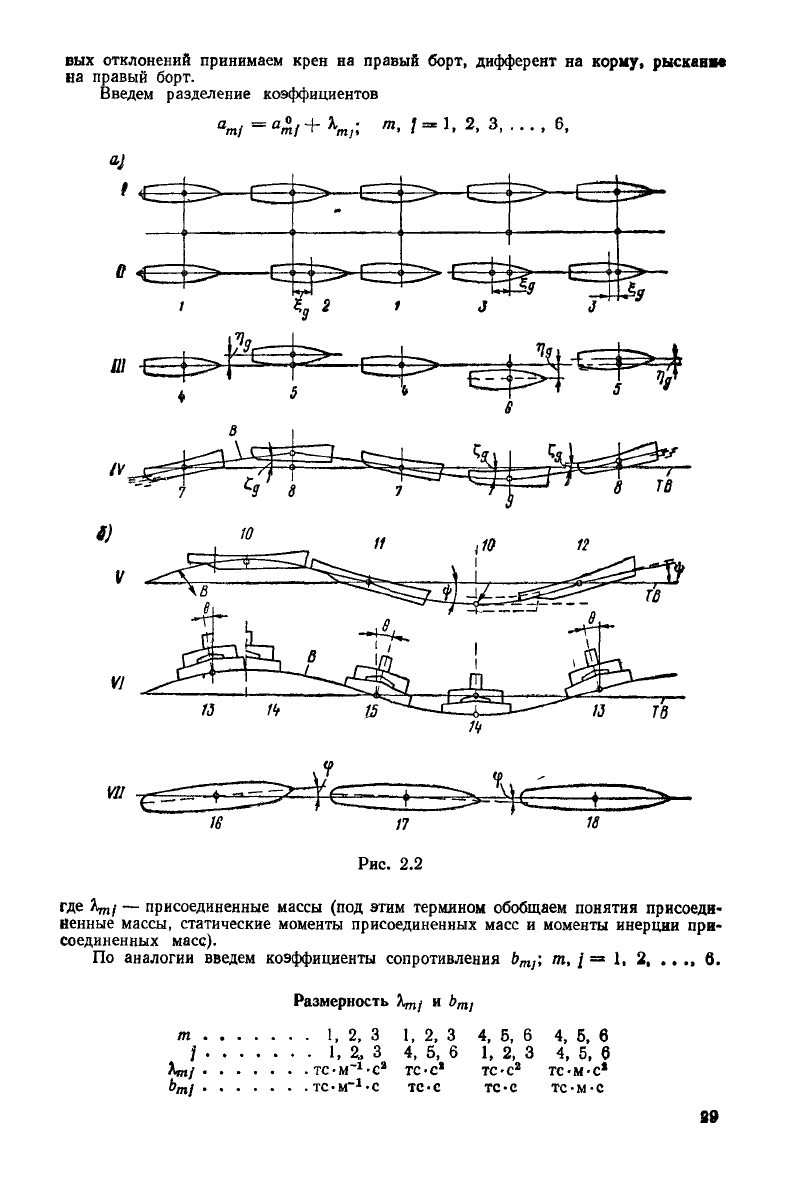
именуются в соответствии с терминологией, приведенной в табл. 2.4. О характере
колебаний
судна можно судить по схеме, приведенной на рис. 2.2 (рис. 2.2, а — ли-
нейные,
рис. 2.2, б — угловые). На рисунке приняты обозначения: / — судно
движется с постоянной скоростью прямолинейным курсом; // — горизонтально-
продольные колебания; /// — горизонтально-поперечные колебания; IV — верти-
кальная
качка; V — килевая качка; VI — бортовая качка; VII — рыскание; 1 —>
горизонтально-продольные отклонения равны нулю; 2 — колебания вперед от сред-
него положения; 3— колебания назад от среднего положения; 4 — дрейф равен
нулю; 5 — дрейф на левый борт; в — дрейф на правый борт; 7 — вертикальные
отклонения
равны нулю; 8 — всплытие; 9 — погружение; 10 — на ровный киль;
// — дифферент на нос; 12 — дифферент на корму; 13 —
угол
крена на правый
•Ч5орт; 14 — прямое положение (угол крена равен нулю); 15 —
угол
крена на левый
-борт; 16 —
угол
рыскания на левый борт; 17
—.угол
рыскания на правый борт;
18
— среднее положение (судно ла заданном курсе); В — поверхность волны; ТВ —
поверхность тихой воды.
Таблица 2.4
Термины,
обозначающие линейные и угловые перемещения вдоль осей, которые
проходят через центр тяжести судна
Ось
Gx
Gy
Ог
Gx
Gy
Gz
по-русски
Термины
по-английски
по-немецки
по-фран-
цузски
Линейные
перемещения
вдоль
осей
Горизонтально-
продольные коле-
Горизонтально-
поперечные колеба-
ния
Вертикальная
качка
Бортовая качка
Килевая
качка
Рыскание
Surging
(to
surge)
S
waying
(to
sway)
Heaving
(to
heave)
—
Die
Tauch-
schwingung
(tauehen)
Вращение
вокруг
осей
Rolling
(to
roll)
Pitching
(to
pitch)
Kawing
(to
yaw)
Die
Roll-
schwingung
(rollen)
Die
Stampf-
bewegung
(stampfen)
Die
Qier-
schwingung
(gieren)
—
(diporter)
Le pilon-
nage •
(pilonner)
Le roulis
(rouler)
Le tangage
(tanguer)
L'embarde-
ment
(embarder)
по-голланд-
ски
(schrikken)
(versetten)
(dampen)
(schingeren)
(stampen)
(gieren)
За
положительные линейные перемещения принимаем перемещения вдоль
положительных направлений осей Ох, Оу, Ог; за положительные направления угло-
28
вых отклонений принимаем крен
на
правый борт, дифферент
на кориу, рысканм
на
правый борт.
Введем
разделение коэффициентов
a
mi=
a
ml+Kn
m. f-1. 2, 3 6,
где %mf
—
присоединенные массы
(под
этим термином обобщаем понятия присоеди-
ненные массы, статические моменты присоединенных масс
и
моменты инерции
при-
соединенных масс).
По
аналогии
введем
коэффициенты сопротивления
Ь
т1
; т, [ = 1, 2 в.
Размерность
Xmj и Ь
т
1, 2, 3
/
U3
Кп] тс-м^-с
bml
тс-м^-с
'mi
1,
2, 3 4, 5, 6 4, б, 6
4,
5, 6 1, 2, 3 4, 5, 6
а
тс-с* тс-с
2
тс-м-с*
тс-с
тс-с
тс-м-с
89
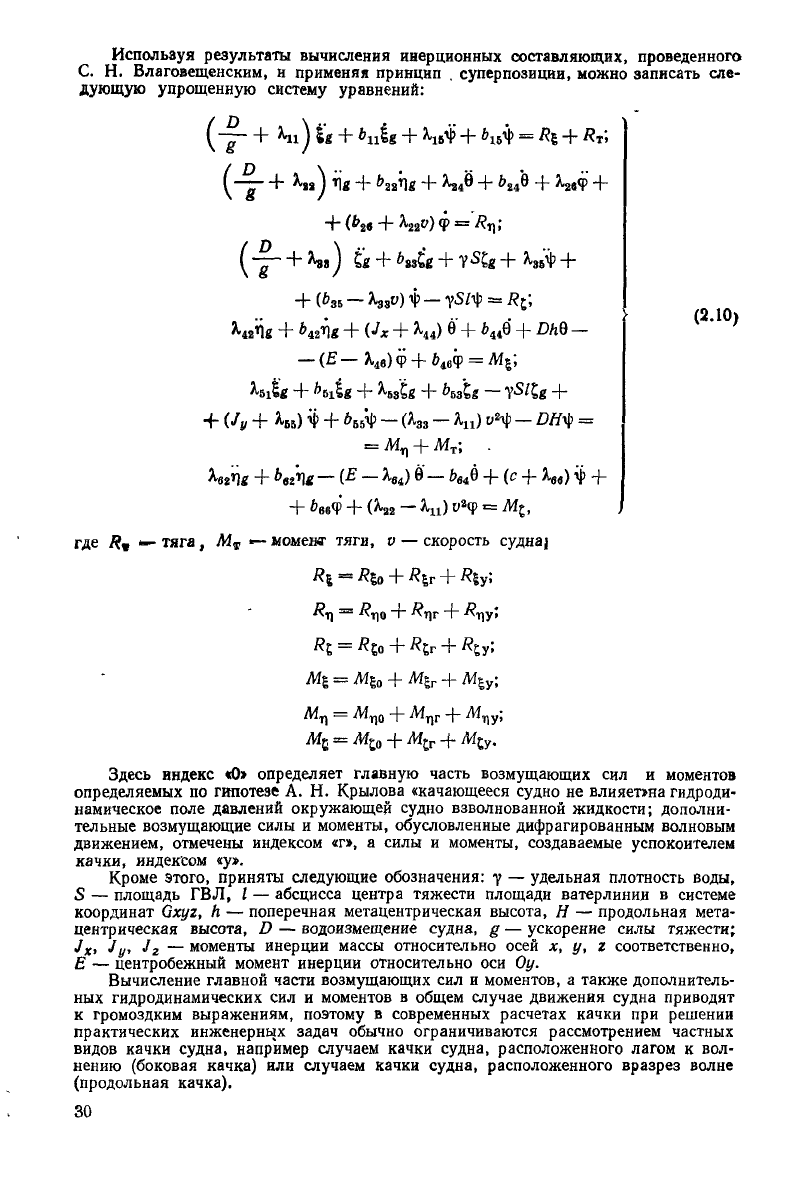
Используя результаты вычисления инерционных составляющих, проведенного
С. Н. Благовещенским, н применяя принцип . суперпозиции, можно записать сле-
дующую
упрощенную систему уравнений:
+
+
Кд в +
6446
+ яле _
^ + Af
T
; .
(2.10)
где /?, <—
тяга,
М
т
»— момент тяги, о — скорость судна|
^ =
/?,,,
+ R^r + Я^у;
Здесь индекс «0» определяет главную часть возмущающих сил и моментов
определяемых по гипотезе А. Н. Крылова «качающееся судно не влияет»яа гидроди-
намическое поле давлений окружающей судно взволнованной жидкости; дополни-
тельные возмущающие силы и моменты, обусловленные дифрагированным волновым
движением, отмечены индексом «г», а силы и моменты, создаваемые успокоителем
качки,
индексом «у».
Кроме
этого, приняты следующие обозначения: 7 — удельная плотность воды,
S
— площадь ГВЛ, / — абсцисса центра тяжести площади ватерлинии в системе
координат
Gxyz,
h — поперечная метацентрическая высота, Н — продольная мета-
центрическая высота, D — водоизмещение судна, g — ускорение силы тяжести;
Jx> Jy Jz — моменты инерции массы относительно осей х, у, г соответственно,
Е
— центробежный момент инерции относительно оси Оу.
Вычисление главной части возмущающих сил и моментов, а также дополнитель-
ных гидродинамических сил и моментов в общем
случае
движения судна приводят
к
громоздким выражениям, поэтому в современных расчетах качки при решении
практических инженерных задач обычно ограничиваются рассмотрением частных
видов качки судна, например случаем качки судна, расположенного лагом к вол-
нению
(боковая качка) или случаем качки судна, расположенного вразрез волне
(продольная качка).
30