Білинський, Й.Й. Методи обробки зображень в комп’ютеризованих оптико-електронних системах: монографія
Подождите немного. Документ загружается.

де
(1n−),(1)n+
– номер піксела зліва та справа від максимуму інтенси-
вності світлової плями;
11
(1) (1)
,
nn
II
−
+
– значення інтенсивності зліва та
справа від максимуму світлової плями повторно фільтрованого зобра-
ження;
,
α
β
– коефіцієнти нахилу кривої розподілу інтенсивності
справа і зліва від максимуму світлової плями, які задаються виразами:
11
(1) 1
1
11 1
(1) 1
1
()
;
(1)
()
.
(1)
nt
t
nt
t
IIn
nn
IIn
nn
α
β
−−
−
++
+
⎧
−
=
⎪
−−
⎪
⎨
−
⎪
=
⎪
+−
⎩
(2.36)
При цьому координати спільних точок фільтрованих зображень
в міжпікселному просторі знаходять аналогічно запропонованому в
підрозділі 2.4.
методу визначення краю об’єкта з урахуванням номера
піксела згідно з формулою (2.31):
1
1
11
11
()
()()
nn
t
nn nn
II
nN
IIII
−
++
⎛⎞
−
=+
⎜⎟
−− −
⎝⎠
d
. (2.37)
Аналогічним чином визначається й точка перетину
t
n
Інтенсивність точки перетину фільтрованих зображень зліва
від піку визначається
1+
.
11
(1) 1 (2) 1
1
((2)) ((1))
()
(1)(2)
nt n t
t
In n I n n
In
nn
−− − −
−
−− + −−
=
−− −
, (2.38)
де
)
і координата та інтенсивність піксела другого зліва від
піку
А фільт-
рованих ко-
ордината максимуму по осі знаходиться аналогічно.
етодична похибка не перевищує
6
%. Але
недоліком цього методу є складність алгоритму, що
не дозволяє його широко використовувати в задачах
при збереженні високої швидкодії.
(2n−
плями
1
(2)n
I
−
.
налогічно визначається інтенсивність точки перетину
зображень справа від піку світлової плями. Субпікселна
m
Результати моделювання, які проведені за аналогічною схе-
мою, наведеною в підрозділі 2.5.1, продемонстрували високу точність
запропонованого методу. Відносна м
основним
визначення піку
90

РОЗДІЛ 3
РОЗРОБКА МЕТОД АЧЕННЯ ГЕОМЕТРИЧНИХ
ПАРАМЕТРІВ ОБ’ЄКТА ВИМІРЮВАННЯ
На таві вищенаведених теоретичних викладок можна зро-
бити висновок про можливість знаходження краю об’єкта на зобра-
ІВ ВИЗН
підс
женні, отриманого за допомогою матричного фотоприймального при-
строю, в міжпікселному просторі та запропонувати методи субпіксел-
ного елементів
вимірювання його контуру
ення та виділення краю об’єкта на
зображенні складається з послідовності операцій, основними з яких є
сканування сцени, виявлення ознак краю об’єкта та обчислення його
координат [52, 154].
ізац краю
зображення
визначення координат простих зображення об’єкта
, а також методи виділення .
3.1. Метод визначення субпікселної координати краю
зображення об’єкта вимірювання
Розв’язування задачі визнач
Узагальнена структура методу субпікселної локал ії
об’єкта вимірювання на основі низькочастотної фільтрації
наведена на рис. 3.1.
Рис. .13 . Структура методу локалізації крайової точки
зображення об’єкта
Метод включає формування контурного препарату, локаліза-
цію краю об’єкта на зображенні та визначення параметрів шуму. Та-
ким чином, для підвищення точності вимірювання необхідно змен-
шити значення шуму на зображенні й при цьому не втратити інфор-
мацію про край внаслідок виконання фільтрації локалізованої межі
зображення об’єкта.
91
При детектуванні краю зображенні існують три ос-
новн дів
інтенсивнос
)
пропуск справжніх перепадів;
, з наступною
максимізацією ймовірності правильного виявлення [155]. При цьому
поріг в мил-
кового виявлення , не перевищує
деяког заданого значення.
йової точки ускладнюється й для її визначення
необхід
метод знаходження крайової точки об’єкта на
основі низькочастотної гауссової фільтрації передбачає такі кроки
[157–161]:
–
визначення точок максимального градієнта, що відповідають
перепаду інтенсивності, а отже, краю зображення;
–
–
зо-
раження;
–
об’єкта на
их типи помилок, пов'язаних з виявленням положення перепа
ті:
1
2)
помилка у визначенні положення перепаду;
3)
прийняття шумових викидів за перепад (помилкове виявлення).
Це означає, що попередньо необхідно виконати процедуру фі-
льтрації з мінімальними втратами інформації, після чого визначити
параметри примежової кривої та встановити деякий поріг ймовірності
помилкового виявлення, що є наслідком впливу шуму
становлюється на такому рівні, при якому ймовірність по
, обумовленого одним лише шумом
о
Часто перепад фон/об’єкт знаходиться в інтервалі декількох пі-
кселів, а іноді через низьку освітленість частини об’єкта цей перепад
буде пологим, шириною в десятки пікселів. В такому випадку проце-
дура знаходження кра
на апріорна інформація про конкретне зображення фону та
об’єкта вимірювання [52, 156, 131].
Таким чином,
визначення орієнтації градієнта;
визначення параметрів шуму та виконання фільтрації
б
знаходження розмірності вікна маски за розподілом сигналу
інтенсивності примежової кривої;
–
формування однонаправленого гауссового фільтра з визна-
ченими параметрами відповідної орієнтації залежно від напрямку ве-
ктора градієнта;
–
знаходження спільних точок на примежовій кривій фільтро-
ваних зображень.
92
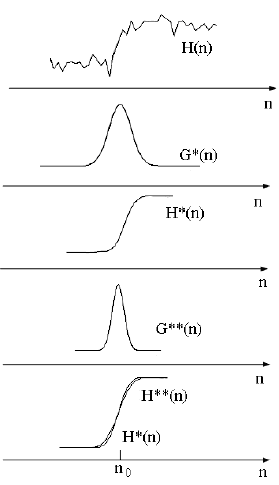
Етапи формування примежових кривих та знаходження крайо-
вої точки об’єкта наведені на рис. 3.2.
На підставі вищесказаного, основною задачею, яку необхідно
онованого методу, є задача
інформації, що
більш
едачі цього зображення. Використання фі-
льтрів
розв’язати для ефективної роботи запроп
ефективної фільтрації, результатом якої є збереження
дає змогу визначити субпікселну координату крайової точки. Най-
ефективними для виконання цієї операції є адаптивні нелінійні
фільтри [1, 156, 162].
3.1.1. Вибір фільтрів приглушення шуму в задачах
крайового детектування
Основна проблема задачі визначення країв, як було сказано ви-
ще, – це шуми зображення, які виникають в процесі отримання зобра-
ження, а також в процесі пер
для обробки реальних сцен ускладнено головним чином складніс-
тю законів розподілу ймовірностей шумів і їхньою нестаціонарністю.
Рис. 3.2. Етапи знаходження крайової точки
зображення об’єкта
93

Найбільш часто за модель зашумленого сигналу приймається
адитивна модель [52]
(, ) (, ) (, )fnm Snm Nnm
=
+
,
де
(, )Nnm
– нормально розподілений білий шум [163, 164].
В дійсності модель зашумленого сигналу має більш складний
характер з урахуванням параметрів фону, тому використовується ади-
тивна мультиплікативна модель, яка має вигляд
0
(, ) (, ) (, ) (, )
F
nm g Snm gnmNnm
=
++
,
де
0
g
– постійна складова інтенсивності – функція фону.
(, )gnm
Для реалізації детектора крайового детектування в будь-якому
випадку необхідно виконати процедуру приглушення шуму або віднов-
лення зображення. З цією метою необхідно розглянути процес мініміза-
ції помилки в результаті виконання фільтрації та будувати такий фільтр,
який забезпечує мінімум помилки, тобто мінімізує його дисперсію:
{}
{
}
2
2
2
() () () minEnEfnfn
εε
==−→
. (3.1)
При цьому найбільш суттєвим обмеженням є вимога лінійності
системи фільтрації.
У випадку білого шуму низькочастотний фільтр стає узгодже-
ним з сигналом і формує на своєму виході сигнал, низькочас-
тотні складові якого слабо видозмінені.
У тих випадках, коли на зображенні наявний тільки адитивний
шум, то найкращим методом відновлення є просторова лінійна фільт-
рація. Але у випадку неправильного вибору параметрів і розмірності
фільтра, можлива втрата параметрів примежової кривої або краю в
цілому.
Ефект розмиття краю може бути суттєво знижений при вико-
ристанні нелінійних фільтрів, які основані на порядкових статистиках
і дають менший ефект розфокусування в порівнянні з лінійними.
Оскільки для точного визначення краю зображення ставиться задача
виконання фільтрації при мінімальній зміні параметрів краю, то
останні є біл
(, )Snm
ьш ефективними.
94
Одним із найбільш відомих фільтрів такого типу є медіанний
фільтр, суть роботи якого полягає в заміні значень у точках зображення
на медіану значень інтенсивності в околі цієї точки [51, 165–169]:
{
}
(, )
f
nm
(,)
(,)
st D
nm
med gst
∈
=
.
Оскільки примежова крива краю об’єкта на зображенні є не по-
стійною, то необхідно використовувати адаптивний фільтр, параметри
якого будуть змінюватися залежно від статистичних властивостей
примежової кривої. Такий фільтр повинен "зберегти деталі" в облас-
тях, спотворених неімпульсним шумом.
Адаптивний медіанний фільтр здійснює обробку в прямокут-
ному вікні. У випадку аналізу примежової кривої у вікні, що має один
рядок, і на відміну від простого медіанного фільтра, адаптивний меді-
анний фільтр змінює (збільшує) розміри свого вікна під час роботи
залежно від величини шуму. При цьому реакцією фільтра є одне єдине
значення піксела, що заміщується й яке є центром вікна. Після вико-
нання такої фільтрації все ж таки залишається деякий невизначений
розкид значень інтенсивності сусідніх пікселів і завдяки низькочасто-
тній гауссовій фільтрації досягається можливість усунути цей розкид.
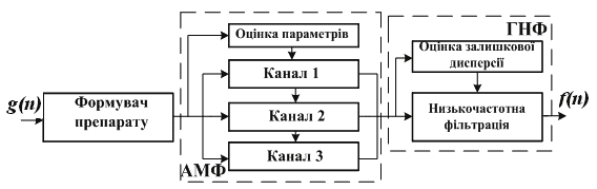
Таким чином, для приглушення шуму на зображенні з метою
збереження параметрів примежової кривої, в роботі запропонована
модель фільтрації, яка містить комбінацію фільтрів, наведених на рис.
3.3.
Рис. 3.3. Фільтр приглушення шуму
Перший – це адаптивний медіанний фільтр, який дозволяє ви-
далити біполярний імпульсний шум, забезпечити згладжування шумів
інших типів, а також звести до мінімуму такі спотворення, як надмір-
95
не зменшення або збільшення самої межі краю об'єкта. Другий – це
низькочастотний гауссовий фільтр, який забезпечує мінімізацію прос-
торового розкиду та частотного інтервалу. При цьому гауссовий
фільтр розглядається як фільтр з мінімальною невизначеністю та ви-
бирається з таким параметром згладження, при якому не змінюється
кривизна примежової кривої.
Адаптивний медіанний фільтр складається з трьох каналів, з
яких працює лише один залежно від рівня шумів.
Перший канал працює як простий медіанний фільтр при наяв-
ності біполярного та уніполярного імпульсного шуму, поки просторо-
ва щільність імпульсного шуму невелика (не перевищує 0,2).
У випадку великого значення шуму працює канал 2 або 3 за ал-
горитмом, який передбачає наявність таких параметрів зображення
оброблюваного вікна:
min
I
– мінімальне значення інтенсивності у вікні ;
ab
S
max
I
– максимальне значення інтенсивності у вікні ;
ab
S
med
I
– медіана значень інтенсивності вікна ;
ab
S
n
I
– значення інтенсивності в точці з номером піксела ;
n
S
max
S
– максимально допустимий розмір вікна .
ab
Значення , сприймаються алгоритмом статистично як
значення «імпульсних» складових шуму, навіть якщо вони не відпові-
дають найменшому та найбільшому можливим значенням інтенсивно-
сті примежової кривої.
min
I
max
I
Канал 2 призначений визначити чи є медіана імпульсом («чор-
ним» або «білим»), чи ні. Якщо виконується умова і
, то необхідно перейти до роботи каналу 3. У випадку
невиконання цієї умови необхідно збільшити розмірність вікна і
перевірити умову. Якщо розмірність вікна
0
med min
II−>
ab
S
max
0
med
II−<
maxab
SS
=
, то результатом
фільтрації залишається інтенсивність
n
I
. Таким чином, процес повто-
рюється доти, поки або не буде знайдена медіана, відмінна від імпуль-
су, або розміри вікна не досягнуть максимального допустимого розмі-
ру. Якщо умова виконана, то в силу зазначених причин інтенсивність
піксела не може бути прийнята імпульсом, тобто шумом.
96

При переході до роботи каналу 3 перевіряють чи є імпульсом
значення
n
I
. Для цього необхідно, щоб
0
nmin
II
−
>
і
max
0
n
II−<
, тоді
результатом фільтрації є
n
I
. Якщо дана умова не виконується, тоді ре-
зультатом фільтрації є
med
I
. Остання операція відповідає дії звичайно-
го медіанного фільтра.
Відмінність роботи цього алгоритму полягає в тому, що зви-
чайний медіанний фільтр виконує заміну значення в кожній точці на
значення медіани у відповідному вікні, а у нашому випадку тільки при
невиконанні вищенаведеної умови.
Таким чином, відфільтроване зображення попадає на вхід ни-
зькочастотного гауссового фільтра. Оскільки залишки шуму в резуль-
таті виконання адаптивної медіанної фільтрації ще мають місце, то
необхідно проаналізувати статистичні характеристики зображення.
Результати ряду робіт вказують на незначну зміну відношення
сигнал/шум ця ме-
тодика пер во о фільтра
з певними єт я на рівні 0,12 та
0,88 пере
при зміні розмірності вікна фільтра. Але оскільки
едбачає використання низькочастотного гауссо г
параметрами, розмірність вікна вибира ьс
паду інтенсивності та визначається як
0,88 0,12
(( ) ( ))
2
nS nS
l
−
=
. (3.2)
Шум на зображенні має гауссову щільність ймовірності з дис-
персією, що залежить від рівня сигналу. Тому для знаходження пара-
метрів
зображення
послідовним
шуму необхідно оцінити дисперсію. Для
цього на зображенні,
як правило, використовують квадратне вікно в області та
скануванням знаходять таку ділянку, що має найменшу
дисперсію сигналу згідно з формулою [51, 52]
1
1
2
2
2
((,))
jWS
iWS
ni m
Mx g n m
D
WS
σ
+−
j
+−
==
−
==
∑∑
, (3.3)
де
(, )gnm
– інтенсивність піксела зображення;
M
x
– математичне спо-
дівання (середнє значення) сигналу у вікні;
,ij
– координати верхньо-
го лівого кутка досліджуваного вікна;
WS
– розмір сторони вікна.
97
Дисперсія сигналу в знайденому вікні приблизно приймається
за дисперсію шуму на зображенні.
У реальних зображеннях виникають ситуації, коли ділянка зо-
браження має максимал або мінімальні значення інтенсивності. То-
ді дисперсія сигналу дорівнює
хідно у
ьні
нулю, і при обробці зображення необ-
никнути оцінки шуму на таких ділянках. Для цього при інтен-
сивності піксела, що відповідає мінімальній або максимальній інтен-
сивності, виразу в дужках формули (3.3), присвоюється максимальне
значення перепаду інтенсивності.
При визначенні дисперсії шуму необхідно враховувати й те, що
реальне значення дисперсії можна знайти, тільки якщо розмірність
вікна збігається з розміром зображення, а зображення однорідне (не
містить об'єктів). При малій розмірності вікна, знайдене значення дис-
персії може виявитися дуже заниженим. Тому розмірність вікна по-
винна вибиратися виходячи з вигляду оброблюваних зображень, тоді
значення дисперсії вибирається як
2
2
ш
σ
, а сам алгоритм стає двопрохі-
дним.
У результаті знаходження параметрів шуму досягається мож-
ливість за допомогою гауссового фільтра отримати зображення при-
межової кривої з мінімальною похибкою. Оскільки зображення підда-
у ще й розмиванню
перерозподілу інтенсивності в області примежової кривої, то втратити
деякої
лося окрім приглушення шум , що призводить до
інформації про край об’єкта є неминучими.
Загальний вигляд фільтрації зображення розмірністю
M
N×
за
допомогою фільтра зваженого середнього в околі
ij
×
задається вира-
зом [51]:
(,) *(
ab
, )
**( , )
(,)
satb
ab
satb
g
stH n sm t
Hnm
gst
=− =−
=− =−
+
+
=
∑∑
,
∑∑
де
1i
a
−
=
,
1
2
j
b
−
=
.
2
Та зо
на
–
виконання фільтрації за допомогою комбінованого фільтра;
ким чином у випадку зашумленості браження, алгоритм
визначення краю об’єкта включає такі дії:
–
визначення параметрів шуму зображенні;
98
–
краю об’єкта зображення;
–
ої фільтрації за допомогою гауссо-
вого ф
ето
ння об’єкта розроблено детектор краю, структурна схема яко-
го нав
визначення координат максимального градієнта, що відпові-
дає перепаду інтенсивності, а отже,
визначення орієнтації градієнта;
–
знаходження параметрів гауссоїди за розподілом сигналу ін-
тенсивності примежової кривої в точках максимального градієнта;
–
формування однонаправленого гауссового фільтра з певними
параметрами та розмірністю вікна маски відповідної орієнтації зале-
жно від напрямку вектора градієнта;
–
виконання низькочастотн
ільтра з певними параметрами;
–
знаходження спільних точок на примежовій кривій фільтро-
ваних зображень.
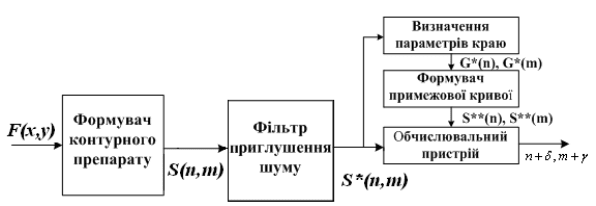
3.1.2. Розробка детектора крайового детектування на основі
низькочастотної фільтрації
На підставі запропонованого м ду знаходження крайової точки
зображе
едена на рис. 3.4.
Детектор містить формувач контурного препарату, комбінований
фільтр приглушення шуму, а також обчислювальний пристрій. Згідно
з алгоритмом детектор спочатку аналізує параметри шуму та парамет-
ри примежової кривої, а потім обчислює координати крайової точки.
Рис. 3.4. Структура детектора визначення краю
на основі низькочастотної фільтрації
сягається можливість отри-
інформація про
У результаті приглушення шуму до
мати розподіл інтенсивності примежової кривої
*( )Sn
,
яку надходить на вхід обчислювального пристрою. Обчислювальний
99