Chow T.L. Mathematical Methods for Physicists: A Concise Introduction
Подождите немного. Документ загружается.


Solution: Our equation would be homogeneous if it were not for the constants
ÿ5 and ÿ1 in the numerator and denominator respectively. But we can eliminate
them by a change of variable:
x
0
x ; y
0
y ÿ;
where and ÿ are constants specially chosen in order to make our equation
homogeneous:
dy
0
=dx
0
y
0
x
0
=y
0
ÿ 3x
0
:
Note that dy
0
=dx
0
dy=dx. Trivial algebra yields ÿ1 ;ÿ ÿ4. Now let
v y
0
=x
0
, then
dy
0
dx
0
d
dx
0
x
0
vv x
0
dv
dx
0
and our equation becomes
v x
0
dv
dx
0
v 1
v ÿ 3
; or
v ÿ 3
ÿv
2
4v 1
dv
dx
0
x
0
in which the variables are separated and the equation can be solved by integra-
tion.
Example 2.5
Fall of a skydiver.
Solution: Assuming the parachute opens at the beginning of the fall, there are
two forces acting on the parachute: the downward force of gravity mg, and the
upward force of air resistance kv
2
. If we choose a coordinate system that has y 0
at the earth's surface and increases upward, then the equation of motion of the
falling diver, according to Newton's second law, is
mdv=dt ÿmg kv
2
;
where m is the mass, g the gravitational acceleration, and k a positive constant. In
general the air resistance is very complicated, but the power-law approximation is
useful in many instances in which the velocity does not vary appreciably.
Experiments show that for a subsonic velocity up to 300 m/s, the air resistance
is approximately proportional to v
2
.
The equation of moti on is separable:
mdv
mg ÿ kv
2
dt
66
ORDINARY DIFFERENTIAL EQUATIONS
or, to make the integration easier
dv
v
2
ÿmg=k
ÿ
k
m
dt:
Now
1
v
2
ÿmg=k
1
v v
t
v ÿ v
t
1
2v
t
1
v ÿ v
t
ÿ
1
v v
t
;
where v
2
t
mg=k. Thus
1
2v
t
dv
v ÿ v
t
ÿ
dv
v ÿ v
t
ÿ
k
m
dt:
Integrating yields
1
2v
t
ln
v ÿ v
t
v v
t
ÿ
k
m
t c;
where c is an integration constant.
Solving for v we ®nally obtain
vt
v
t
1 B expÿ2gt=v
t
1 ÿ B expÿ2gt=v
t
;
where B exp2v
t
C.
It is easy to see that as t !1, exp(ÿ2gt=v
t
!0, and so v ! v
t
; that is, if he
falls from a sucient height, the diver will eventually reach a constant velocity
given by v
t
, the terminal velocity. To determine the constants of integration, we
need to know the value of k, which is about 30 kg/m for the earth's atmosphere
and a standard parachute.
Exact equations
We may integrate Eq. (2.1) directly if its left hand side is the diÿerential du of
some function ux; y, in which case the solution is of the form
ux; yC 2:5
and Eq. (2.1) is said to be exact. A convenient test to see if Eq. (2.1) is exact is
does
@gx; y
@x
@f x; y
@y
: 2:6
To see this, let us go back to Eq. (2.5) and we have
dux; y 0:
On perfor ming the diÿerentiation we obtain
@u
@x
dx
@u
@y
dy 0: 2:7
67
FIRST-ORDER DIFFERENTIAL EQUATIONS
It is a general property of partial derivatives of any well-behaved function that
the order of diÿerentiation is immaterial. Thus we have
@
@y
@u
@x
@
@x
@u
@y
: 2:8
Now if our diÿerential equation (2.1) is of the form of Eq. (2.7), we must be able
to identify
f x; y@u=@x and gx; y@u=@y: 2:9
Then it follows from Eq. (2.8) that
@gx; y
@x
@f x ; y
@y
;
which is Eq. (2.6).
Example 2.6
Show that the equation xdy=dx x y 0 is exact and ®nd its general solu-
tion.
Solution: We ®rst write the equation in standard form
x ydx xdy 0:
Applying the test of Eq. (2.6) we notice that
@f
@y
@
@y
x y1 and
@g
@x
@x
@x
1:
Therefore the equation is exact, and the solution is of the form indicated by Eq.
(2.7). From Eq. (2.9) we have
@u=@x x y;@u=@y x;
from which it follows that
ux; yx
2
=2 xy hy; ux; yxy kx;
where hy and kx arise from integrating ux; y with respect to x and y, respec-
tively. For consistency, we require that
hy0andkxx
2
=2:
Thus the required solution is
x
2
=2 xy c:
It is interesting to consider a diÿerential equation of the type
gx; y
dy
dx
f x; ykx; 2:10
68
ORDINARY DIFFERENTIAL EQUATIONS

where the left hand side is an exact diÿerential d=dxux; y, and kx on the
right hand side is a function of x only. Then the solution of the diÿerential
equation can be written as
ux; y
Z
kxdx: 2:11
Alternatively Eq. (2.10) can be rewritten as
gx; y
dy
dx
f x; yÿkx 0: 2:10a
Since the left hand side of Eq. (2.10) is exact, we have
@g=@x @f =@y:
Then Eq. (2.10a) is exact as well. To see why, let us apply the test for exactness for
Eq. (2.10a) which requires
@
@x
gx; y
@
@y
f x; yÿkx
@
@y
f x; y:
Thus Eq. (2.10a) satis®es the necessary requirement for being exact. We can thus
write its solution as
Ux; yc;
where
@U
@y
gx; y and
@U
@x
f x; yÿkx:
Of course, the solution Ux; yc must agree with Eq. (2.11).
Integrating factors
If a diÿerential equation in the form of Eq. (2.1) is not already exact, it sometimes
can be made so by multiplying by a suitable factor, called an integratin g factor.
Although an integrating factor always exists for each equation in the form of Eq.
(2.1), it may be dicult to ®nd it. However, if the equation is linear, that is, if can
be written
dy
dx
f xy gx2:12
an integrating factor of the form
exp
Z
f xdx
2:13
is always available. It is easy to verify this. Suppose that Rx is the integrating
factor we are looking for. Multiplying Eq. (2.12) by R, we have
R
dy
dx
Rf xy Rgx; or Rdy Rf xydx Rgxdx:
69
FIRST-ORDER DIFFERENTIAL EQUATIONS

The right hand side is already integrable; the condition that the left hand side of
Eq. (2.12) be exact gives
@
@y
Rf xy
@R
@x
;
which yields
dR=dx Rf x; or dR=R f xdx;
and integrating gives
ln R
Z
f xdx
from which we obtain the integrating factor R we were looking for
R exp
Z
f xdx
:
It is now possible to write the general solution of Eq. (2.12). On applying the
integrating factor, Eq. (2.12) becomes
dye
F
dx
gxe
F
;
where Fx
R
f xdx. The solution is clearly given by
y e
ÿF
Z
e
F
gxdx C
:
Example 2.7
Show that the equation xdy=dx 2y x
2
0 is not exact; then ®nd a suitable
integrating factor that makes the equation exact. What is the solution of this
equation?
Solution: We ®rst write the equation in the standard form
2y x
2
dx xdy 0;
then we notice that
@
@y
2y x
2
2and
@
@x
x 1;
which indicates that our equation is not exact. To ®nd the required integrating
factor that makes our equation exact, we rewrite our equ ation in the form of Eq.
(2.12):
dy
dx
2y
x
ÿx
70
ORDINARY DIFFERENTIAL EQUATIONS
from which we ®nd f x1=x, and so the required integrating factor is
exp
Z
1=xdx
expln xx:
Applying this to our equation gives
x
2
dy
dx
2xy x
3
0or
d
dx
x
2
y x
4
=4
ÿ
0
which integrates to
x
2
y x
4
=4 c;
or
y
c ÿ x
4
4x
2
:
Example 2.8
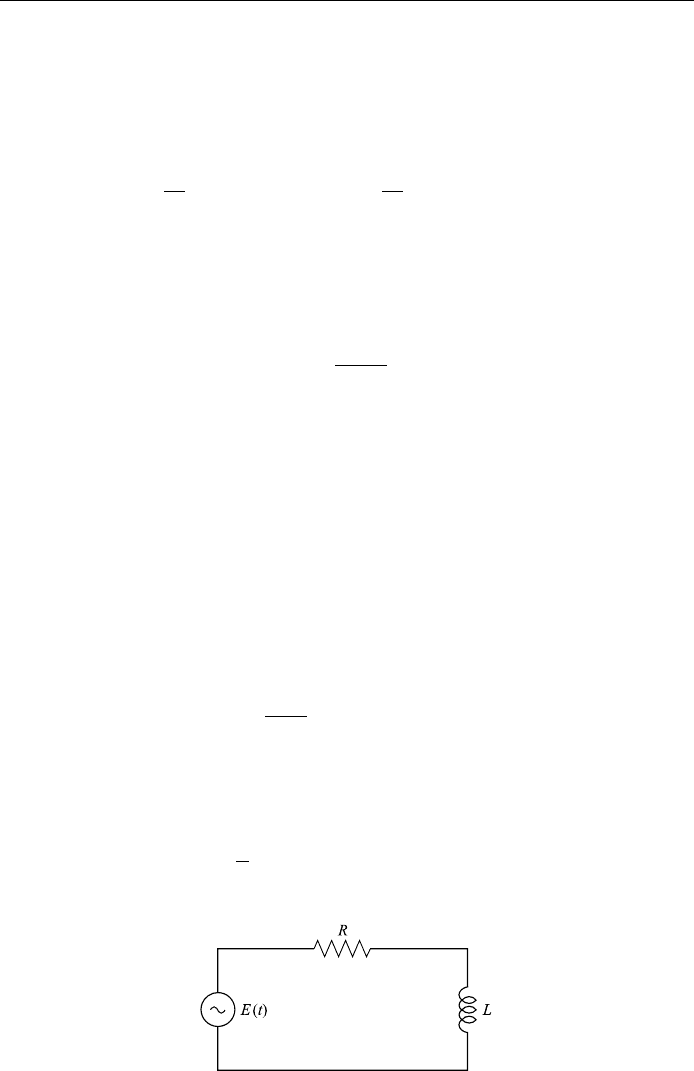
RL circuits: A typical RL circuit is shown in Fig. 2.1. Find the current It in the
circuit as a functi on of time t.
Solution: We need ®rst to establ ish the diÿerential equation for the current
¯owing in the circuit. The resistance R and the inductance L are both constant.
The voltage drop across the resistance is IR, and the voltage drop across the
inductance is LdI=dt. Kirchhoÿ 's second law for circuits then gives
L
dI t
dt
RItEt;
which is in the form of Eq. (2.12), but with t as the independent variable instead of
x and I as the dependent variable instead of y. Thus we immediately have the
general solution
It
1
L
e
ÿRt=L
Z
e
Rt=L
Etdt ke
ÿRt=L
;
71
FIRST-ORDER DIFFERENTIAL EQUATIONS
Figure 2.1. RL circuit.
where k is a constant of integration (in electric circuits, C is used for capacitance).
Given E this equation can be solved for It. If the voltage E is constant, we
obtain
It
1
L
e
ÿRt=L
E
L
R
e
ÿRt=L
ke
ÿRt=L
E
R
ke
ÿRt=L
:
Regardless of the value of k, we see that
It!E=R as t !1:
Setting t 0 in the solution, we ®nd
k I0ÿE=R:
Bernoulli's equation
Bernoulli's equation is a non-linear ®rst-order equation that occurs occasionally
in physical problems:
dy
dx
f xy gxy
n
; 2:14
where n is not necessarily integ er.
This equation can be made linear by the substitution w y
a
with suitably
chosen. We ®nd this can be achieved if 1 ÿ n :
w y
1ÿn
or y w
1=1ÿn
:
This converts Bernoulli's equation into
dw
dx
1 ÿ nf xw 1 ÿ ng x;
which can be made exact using the integrating factor exp
R
1 ÿ nf xdx.
Second-order equations with constant coecients
The general form of the nth-order linear diÿerential equation with constant coef-
®cients is
d
n
y
dx
n
p
1
d
nÿ1
y
dx
nÿ1
p
nÿ1
dy
dx
p
n
y D
n
p
1
D
nÿ1
p
nÿ1
D p
n
y f x;
where p
1
; p
2
; ... are constants, f x is some function of x, and D d=dx.If
f x0, the equation is called homogeneous; otherwise it is called a non-homo-
geneous equation. It is important to note that the symbol D is meaningless unless
applied to a function of x and is therefore not a mathematical quantity in the
usual sense. D is an operator.
72
ORDINARY DIFFERENTIAL EQUATIONS
Many of the diÿerential equations of this type which arise in physical problems
are of second order and we shall con sider in detail the solution of the equation
d
2
y
dt
2
a
dy
dt
by D
2
aD by f t; 2:15
where a and b are constants, and t is the independent variable. As an example, the
equation of motion for a mass on a spring is of the form Eq. (2.15), with a
representing the friction, c being the constant of proportionality in Hooke's law
for the spring, and f t some time-dependent external force acting on the mass.
Eq. (2.15) can also app ly to an electric circuit consisting of an inductor, a resistor,
a capacitor and a varying external voltage.
The solution of Eq. (2.15) involves ®rst ®nding the solution of the equation with
f t replac ed by zero, that is,
d
2
y
dt
2
a
dy
dt
by D
2
aD by 0; 2:16
this is called the reduced or homogeneous equation corresponding to Eq. (2.15).
Nature of the solution of linear equations
We now establish some results for linear equations in general. For simplicity, we
consider the second-order reduced equation (2.16). If y
1
and y
2
are independent
solutions of (2.16) and A and B are any constants, then
DAy
1
By
2
ADy
1
BDy
2
; D
2
Ay
1
By
2
AD
2
y
1
BD
2
y
2
and hence
D
2
aD bAy
1
By
2
AD
2
aD by
1
BD
2
aD by
2
0:
Thus y Ay
1
By
2
is a solut ion of Eq. (2.16), and since it contains two arbitrary
constants, it is the general solution. A necessary and sucient condition for two
solutions y
1
and y
2
to be linearly independent is that the Wronskian determinant
of these functions does not vanish:
y
1
y
2
dy
1
dt
dy
2
dt
þ
þ
þ
þ
þ
þ
þ
þ
þ
þ
þ
þ
þ
þ
6 0:
Similarly, if y
1
; y
2
; ...; y
n
are n linearly independent solutions of the nth-order
linear equations, then the general solution is
y A
1
y
1
A
2
y
2
A
n
y
n
;
where A
1
; A
2
; ...; A
n
are arbitrary constants. This is known as the superposition
principle.
73
SECOND-ORDER EQUATIONS WITH CONSTANT COEFFICIENTS

General solutions of the second-order equations
Suppose that we can ®nd one solution, y
p
t say, of Eq. (2.15):
D
2
aD by
p
tf t: 2:15a
Then on de®ning
y
c
tytÿy
p
t
we ®nd by subtracting Eq. (2.15a) from Eq. (2.15) that
D
2
aD by
c
t0:
That is, y
c
t satis®es the corresponding homogeneous equation (2.16), and it is
known as the complementary function y
c
t of non-homogeneous equation (2.15).
while the solution y
p
t is called a particular integral of Eq. (2.15). Thus, the
general solution of Eq. (2.15) is given by
ytAy
c
tBy
p
t: 2:17
Finding the complementary function
Clearly the complementary function is independent of f t, an d hence has nothing
to do with the behavior of the system in response to the external applied in¯uence.
What it does represent is the free motion of the system. Thus, for example, even
without external forces applied, a spring can oscillate, because of any initial
displacement and/or velocity. Similarly, had a capacitor already been charged
at t 0, the circuit would subsequently display current oscillations even if there
is no applied voltage.
In order to solve Eq. (2.16) for y
c
t, we ®rst consider the linear ®rst-order
equation
a
dy
dt
by 0:
Separating the variables and integrating, we obtain
y Ae
ÿbt=a
;
where A is an arbitrary constant of integration. This solution suggests that Eq.
(2.16) might be satis®ed by an expression of the type
y e
pt
;
where p is a constant. Puttin g this into Eq. (2.1 6), we have
e
pt
p
2
ap b0:
Therefore y e
pt
is a solution of Eq. (2.16) if
p
2
ap b 0:
74
ORDINARY DIFFERENTIAL EQUATIONS

This is called the auxiliary (or characteristic) equation of Eq. (2.16). Solving it
gives
p
1
ÿa
a
2
ÿ 4b
p
2
; p
2
ÿa ÿ
a
2
ÿ 4b
p
2
: 2:18
We now distinguish between the cases in which the roots are real and distinct,
complex or coincident.
(i) Real and distinct roots (a
2
ÿ 4b > 0
In this case, we have two independent solutions y
1
e
p
1
t
; y
2
e
p
2
t
and the general
solution of Eq. (2.16) is a linear co mbination of these two:
y Ae
p
1
t
Be
p
2
t
; 2:19
where A and B are constants.
Example 2.9
Solve the equation D
2
ÿ 2D ÿ 3y 0, given that y 1 and y
0
dy=dx 2
when t 0.
Solution: The auxiliary equation is p
2
ÿ 2p ÿ 3 0, from which we ®nd p ÿ1
or p 3. Hence the general solution is
y Ae
ÿt
Be
3t
:
The constants A and B can be determined by the boundary conditions at t 0.
Since y 1 when t 0, we have
1 A B:
Now
y
0
ÿAe
ÿt
3Be
3t
and since y
0
2 when t 0, we ha ve 2 ÿA 3B. Hence
A 1=4; B 3=4
and the solution is
4y e
ÿt
3e
3t
:
(ii) Complex roots a
2
ÿ 4b < 0
If the roots p
1
, p
2
of the auxiliary equation are imaginary, the solution given by
Eq. (2.18) is still correct. In order to give the solutions in terms of real quantities,
we can use the Euler relations to express the exponentials. If we let
r ÿa=2; is
a
2
ÿ 4b
p
=2, then
e
p
1
t
e
rt
e
ist
e
rt
cos st i sin st;
e
p
2
t
e
rt
e
ist
e
rt
cos st ÿ i sin st
75
SECOND-ORDER EQUATIONS WITH CONSTANT COEFFICIENTS