Dantzig G., Thapa M. Linear programming. Vol.1. Introduction
Подождите немного. Документ загружается.


122 INTERIOR-POINT METHODS
We pick an arbitrary
x
o
=(1111)
T
.
Then we compute the quantity b − Ax
o
:
b − Ax
o
=
5
12
−
1110
2301
1
1
1
1
=
2
6
.
Hence we create the following linear program with M = 1000:
Minimize −2x
1
− x
2
+ 1000x
a
= z
subject to x
1
+ x
2
+ x
3
+2x
a
=5
2x
1
+3x
2
+ x
4
+6x
a
=12
and x
j
≥ 0 for j =1,...,4 and x
a
≥ 0.
Then a starting feasible solution is x
o
= e, where e =(1, 1,...,1)
T
, and x
a
=1.
Exercise 4.3 Solve the problem in Example 4.2 using the Primal Affine / Dikin
software option.
See Problems 4.4 and 4.5 and Section 4.4 for a further discussion of the Big-M
Method.
4.4 NOTES & SELECTED BIBLIOGRAPHY
Interior-point methods are not recent, they have been around for a very long time. For
example, in chronological order, von Neumann [1947], Dantzig [1995] (based on an idea
of von Neumann, 1948), Hoffman, Mannos, Sokolowsky, & Wiegmann [1953], Tompkins
[1955, 1957], Frisch [1957], Dikin [1967]. (Fiacco & McMormick [1968] further developed
Frisch’s Barrier Method approach to nonlinear programming.) None of these earlier meth-
ods, including Khachian’s [1979] ellipsoidal polynomial-time method, turned out to be
competitive in speed to the Simplex Method on practical problems.
Interior-point methods became quite a popular way to solve linear programs in the late
1970s and early 1980s. However interior-point (and polynomial-time) methods have been
around for a very long time. For example, in chronological order, von Neumann [1947],
Hoffman, Mannos, Sokolowsky, & Wiegmann [1953], Tompkins [1955, 1957], Frisch [1957],
Dikin [1967], and Khachian [1979]. (Fiacco & McMormick [1968] further developed Frisch’s
Barrier Method approach to nonlinear programming.) None of these earlier methods
turned out to be competitive in speed on practical problems to the Simplex Method.
In 1979, Khachian presented an algorithm, based on a nonlinear geometry of shrinking
ellipsoids, with a worst-case polynomial-time bound of O(n
6
L
2
B
) (where L
B
is the number
of bits required to represent the input data on a computer). Given an open set of inequal-
ities of the form Ax<b, where A is m × n with m ≥ 2, n ≥ 2, Khachian’s algorithm
either finds a feasible point if the system is nonempty or demonstrates that no feasible
point exists. Assuming that the inequalities have a feasible solution, the method starts by
drawing a ball that is large enough to contain a sufficiently large volume of the feasible
space defined by the inequalities Ax<b. If the center of the ball is within the open set of

4.5 PROBLEMS 123
inequalities, a feasible solution has been found and the algorithm terminates. If a feasible
solution is not obtained, the method proceeds to the next iteration by constructing an
ellipsoid of smaller volume that contains the feasible space of the inequalities contained in
the previously drawn ball. If the center of the ellipsoid is in the feasible space of Ax<b,
we have found a feasible solution; otherwise the method proceeds to the next iteration
by constructing another ellipsoid of smaller volume, and so on. The theory developed by
Khachian states that if a feasible solution exists, then the center of some ellipsoid will lie
in the feasible space within a number of iterations bounded by some polynomial expression
in the data. Although Khachian’s ellipsoid method has nice theoretical properties, unfor-
tunately it performs poorly in practice. First, the number of iterations tend to be very
large; and second, the amount of computation associated with each iteration is much more
than that with the Simplex Method. Khachian’s work specialized to linear programming
is based on earlier work done by Shor [1971a, 1971b, 1972a, 1972b, 1975, 1977a, 1977b] for
the more general case of convex programming. Other work that was influenced by Shor
and preceded Khachian was due to Judin & Nemirovskii [1976a,b,c]. Predating all this
was an article by Levin [1965] for convex programming.
In 1984, Karmarkar presented his interior point ellipsoid method with a worst-case
polynomial-time bound of O(n
3.5
L
2
B
), where L
B
, as defined above, is the number of bits
required to represent the input data on a computer. Claims by Karmarkar that his method
is much faster (in some cases 50 times faster) than the Simplex Method stimulated improve-
ments in the simplex-based algorithms and the development of alternative interior-point
methods. Up to 1996, no method has been devised to our knowledge that is superior for all
problems encountered in practice. Since the publication of Karmarkar’s [1984] paper there
have as of 1996 been well over a thousand papers published on interior-point methods. See
Kranich [1991] for a bibliography, M. Wright [1992] for a review of interior-point methods.
Also see Lustig, Marsten, & Shanno [1994] for a review of the computational aspects of
interior-point methods.
The primal affine method presented in this chapter (which is the same as Dikin’s
method) was rediscovered by Barnes [1986] and Vanderbei, Meketon, & Freedman [1986].
Dikin [1974] proved convergence of his method under primal nondegeneracy. Proofs of
convergence of Dikin’s iterates can also be found in Adler, Resende, Veiga, & Karmakar
[1989], Barnes [1986], Dantzig [1988a], Dantzig & Ye [1990], Monma & Morton [1987],
Vanderbei, Meketon, & Freedman [1986], and, under somewhat weaker assumptions, in
Vanderbei & Lagarias [1988].
A projected Newton Barrier method is described and related to Karmarkar’s method in
Gill, Murray, Saunders, Tomlin, & Wright [1986]. Dual approaches of both these methods
have also been developed, see Adler, Resende, Veiga, & Karmarkar [1989] and Renegar
[1988]. Megiddo [1988, 1986] first devised the theory for primal-dual interior-methods (see
Linear Programming 2 for details of the method) which has performed very well in practice.
Lustig, Marsten, & Shanno [1990, 1991a, 1991b, 1992a, 1992b, 1992c, 1994] implemented
and reported promising results for various versions of a primal-dual algorithm. For a
review of methods with a focus on computational results, see, for example, Gill, Murray,
& Saunders [1988] and Lustig, Marsten, & Shanno [1994].
For a description of various interior-point methods see Linear Programming 2. Also,
see Linear Programming 2 for a discussion on what to do in the event that M is not suffi-
ciently large that the vector x
a
goes to zero. Computational techniques (QR factorization,
Cholesky factorization) for solving linear progams by interior-point methods are dicsussed
in Linear Programming 2.

124 INTERIOR-POINT METHODS
4.5 PROBLEMS
4.1 Consider the linear program
Minimize 2x
1
+ x
2
= z
subject to x
1
+ x
2
=2
x
1
≥ 0,x
2
≥ 0.
(a) Plot the feasible region.
(b) Starting with an initial interior feasible solution x
1
=1,x
2
= 1, solve the
problem by hand by the primal affine method described in this chapter.
Plot each iteration and clearly show the direction of steepest descent that
was used.
(c) Solve the problem by the Primal Affine / Dikin software option.
(d) Solve it by the DTZG Simplex Primal software option and compare the
solution obtained to that obtained by the primal affine method.
4.2 Consider the linear program
Maximize x
1
+ x
2
= z
subject to 2x
1
+ x
2
≤ 3
x
1
≤ 1
x
1
≥ 0,x
2
≥ 0.
(a) Plot the feasible region.
(b) Starting with an initial interior feasible solution x
1
=0.5, x
2
=0.5, solve
the problem by hand by the primal affine method described in this chapter.
Plot each iteration.
(c) Solve the problem by the Primal Affine / Dikin software option.
(d) Solve it by the DTZG Simplex Primal software option and compare the
solution obtained to that obtained by the primal affine method.
4.3 Consider the linear program
Minimize x
1
− 2x
2
= z
subject to x
1
+2x
2
=5
x
1
≥ 1
x
1
≥ 0,x
2
≥ 0.
(a) Plot the feasible region.
(b) Starting with an initial interior feasible solution x
1
=2,x
2
=1.5, solve
the problem by hand by the primal affine method described in this chapter.
Plot each iteration.
(c) Solve the problem by the Primal Affine / Dikin software option.
(d) Solve it by the DTZG Simplex Primal software option and compare the
solution obtained to that obtained by the primal affine method.

4.5 PROBLEMS 125
4.4 Use the primal affine method to solve
Minimize 2x
1
+3x
2
= z
subject to 2x
1
+ x
2
≤ 6
x
1
≥ 1
x
1
≥ 0,x
2
≥ 0
as follows:
(a) Plot the feasible region of the problem.
(b) Use the Big-M method of Section 4.3 to generate an initial feasible interior-
point solution.
(c) Plot the path taken by the iterates of the primal-affine method.
4.5 Apply the Big-M method of Section 4.3 to generate an initial feasible solution
to the linear program
Minimize x
1
+ x
2
= z
subject to x
1
+2x
2
≥ 2
3x
1
+2x
2
≤ 1
x
1
≥ 0,x
2
≥ 0.
(a) Apply the primal affine method of this chapter and demonstrate that the
problem is infeasible.
(b) Solve the problem using the Primal Affine / Dikin software option.
(c) When in practice, the Big-M method is applied to large practical problems,
how do you think the choice of M makes a difference in determining whether
the problem is infeasible.
4.6 Consider the following linear program:
Minimize −x
1
= z
subject to x
1
+ x
2
≥ 4
x
1
≥ 0,x
2
≥ 0.
(a) Use the Big-M method of Section 4.3 to generate an initial feasible interior-
point solution.
(b) Apply the primal affine method of this chapter and demonstrate that the
problem is unbounded.
4.7 Solve the following problem by the primal affine method (software option Primal
Affine / Dikin) described in this chapter:
Minimize 3x
1
+2x
2
+4x
3
= z
subject to x
1
+ x
2
+ x
3
=1
x
1
+3x
2
− x
3
=0
and x
1
≥ 0,x
2
≥ 0,x
3
≥ 0.
(4.28)
(a) Use the Big-M method of Section 4.3 to generate an initial feasible interior-
point solution.

126 INTERIOR-POINT METHODS
(b) Solve the problem by a two-phase procedure (similar to the Simplex Method)
as follows. Start by introducing an artificial variable as for the Big-M
method.
• Use a Phase I objective of the form min x
a
to solve the problem.
• Do Phase II. That is, drop the artificial variable and restart the method
with the feasible solution obtained at the end of Phase I and the real
objective of the problem.
(c) Compare the Big-M method with the two-phase method.
4.8 Solve the following linear program with a redundant constraint by hand with
the primal-affine method.
Minimize 3x
1
− 2x
2
= z
subject to x
1
+ x
2
=1
2x
1
+2x
2
=2
and x
1
≥ 0,x
2
≥ 0.
(4.29)
4.9 Consider the following linear program with a redundant constraint:
Minimize x
1
+ x
2
+ x
3
+ x
4
+ x
5
= z
subject to x
1
+2x
2
+ x
3
+ x
4
+2x
5
=5
x
1
− x
2
=1
3x
1
+ x
3
+ x
4
+2x
5
=7
x
j
≥ 0,j=1,...,5.
(a) Solve the linear program by hand using primal-affine method. (You may
want to use mathematical software or spreadsheets to help with matrix
multiplications and solving of systems of equations.)
(b) Apply the Primal Affine / Dikin software option to solve the problem.
Explore the solution of the problem using different values of α (consider
at least 5 different values between 0.5 and 0.99, with 0.95 being one of the
values). Comment on your results.
4.10 Solve the following linear program:
Minimize −x
1
= z
subject to x
1
+ x
2
≥ 4
x
1
≥ 0,x
2
≥ 0.
(a) Plot the feasible region.
(b) Apply the primal-affine method and display the iterates on your plot.
4.11 Consider the following linear program due to Klee & Minty [1972]:
Minimize
m
j=1
−10
m−j
x
j
subject to
2
i−1
j=1
10
i−j
x
j
+ x
i
+ z
i
= 100
i−1
, for i =1,...,m
x
j
≥ 0,z
j
≥ 0, for j =1,...,m.
(4.30)
4.5 PROBLEMS 127
If we apply the Simplex Method (using the largest coefficient rule) to solve
the problem (4.30), then it can be shown that the Simplex Method performs
(2
m
−1) iterations before finding the optimal solution. Apply the Primal Affine
/ Dikin software option for m ≥ 8 to solve the problem. Explore the solution
of the problem using different values of α (consider at least 5 different values
between 0.5 and 0.99). Comment on your results.
4.12 Solve the following problem using the Primal Affine / Dikin software option:
Minimize c
T
x
subject to Ax = b
x ≥ 0,
where A, b, and c are defined as follows:
A
ij
=
1
i + j − 1
, for i, j =1,...,10,
b
i
=
10
j=1
A
ij
, for i =1,...,10,
c
j
=1, for j =1,...,10.
Comment on your solution.
4.13 Use the Primal Affine / Dikin software option to solve the transportation
problem (1.4) on page 5.
4.14 How would you modify the primal affine method to handle upper and lower
bounds on the variables, assuming that on each variable at least one bound is
finite. Discuss how you would handle the case when a variable is unrestricted
in value. Hint: Replace each unrestricted variable by the difference of two
nonnegative variables (see Section 6.2).
This page intentionally left blank

CHAPTER 5
DUALITY
Earlier, see (1.6) and (1.8), we defined the dual of a linear program in standard
form, min z = c
T
x, Ax = b, x ≥ 0, as max v = b
T
π, A
T
π ≤ c. The original problem
in relation to its dual is called the primal. It is easy to prove, by rewriting the dual
in standard form, that the dual of the dual is the primal; see Exercise 5.2. Feasible
solutions to the primal and to the dual may appear to have little relation to one
another. Actually, there is a strong relationship between their objective values;
moreover, their optimal basic feasible solutions are such that it is possible to use
one to obtain the other readily. Commercial software is written using the primal
Simplex Method; as a result, it may sometimes be more convenient to use the dual
to obtain the solution to a linear programming problem than the primal.
5.1 DUAL AND PRIMAL PROBLEMS
5.1.1 VON NEUMANN SYMMETRIC FORM
Given the linear program in the form
PRIMAL: Find min z such that Ax ≥ b, x ≥ 0,c
T
x = z, (5.1)
von Neumann defined its dual as
DUAL: Find max v such that A
T
y ≤ c, y ≥ 0,b
T
y = v. (5.2)
This definition is equivalent to the one given above when the primal problem is
stated in standard form; see also Section 5.1.4.
Exercise 5.1 Based on the above definition of a dual, prove that the dual of a dual is
a primal problem.
129
130 DUALITY
Primal
Variables x
1
≥ 0 x
2
≥ 0 ··· x
n
≥ 0 Relation Constants
y
1
≥ 0 a
11
a
12
··· a
1n
≥ b
1
y
2
≥ 0 a
21
a
22
··· a
2n
≥ b
2
Dual
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
y
m
≥ 0 a
m1
a
m2
··· a
mn
≥ b
m
Relation ≤ ≤ ··· ≤ ≤
Max v
Constants c
1
c
2
··· c
n
≥ Min z
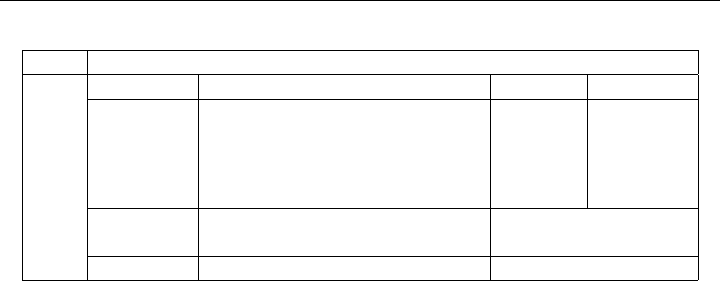
Table 5-1: Tucker Diagram
5.1.2 TUCKER DIAGRAM
To see more clearly the connection between the primal and dual problems, we shall
use Tucker’s detached coefficient array, Table 5-1. The primal problem reads across,
the dual problem down. A simple way to remember the direction of inequality is to
write the primal inequalities ≥ to correspond to the z-form being always ≥ min z,
and to write the dual inequalities ≤ to correspond to the v-form being always
≤ max v.
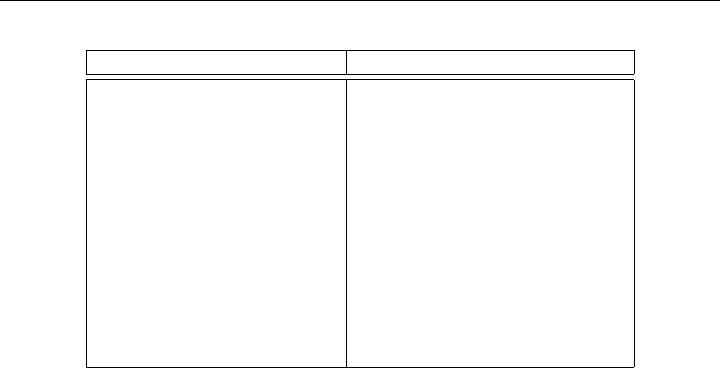
5.1.3 DUALS OF MIXED SYSTEMS
It is always possible to obtain the dual of a system consisting of a mixture of
equations, inequalities (in either direction), nonnegative variables, or variables un-
restricted in sign by changing the system to an equivalent inequality system in the
form (5.1). However, an easier way is to apply certain rules, displayed in Table 5-2,
which we will now discuss. Both the primal and dual systems can be viewed as con-
sisting of a set of variables with their sign restrictions and a set of linear equations
and inequalities, such that the variables of the primal are in one-to-one correspon-
dence with the equations and inequalities of the dual, and such that the equations
and inequalities of the primal are in one-to-one correspondence with the variables
of the dual. When the primal relation is a linear inequality (≥), the corresponding
dual variable of the dual is nonnegative; note in Table 5-2 that if the primal relation
is an equation, the corresponding dual variable will be unrestricted in sign.
As an illustration of these rules, consider the following example:
Example 5.1 (Dual of a Mixed Primal System) Suppose we have the following
mixed primal system find min z, x
1
≥ 0, x
2
≤ 0, x
3
unrestricted, subject to
x
1
+ x
2
+ x
3
= z (min)
x
1
− 3x
2
+4x
3
=5
x
1
− 2x
2
≥ 3
2x
2
− x
3
≤ 4
(5.3)
5.1 DUAL AND PRIMAL PROBLEMS 131
Primal Dual
Minimize Primal Objective Maximize Dual Objective
Objective Coefficients RHS of Dual
RHS of Primal Objective Coefficients
Coefficient Matrix Transposed Coefficient Matrix
Primal Relation: Dual Variable:
(ith) Inequality: ≥ y
i
≥ 0
(ith) Inequality: ≤ y
i
≤ 0
(ith) Equation: = y
i
unrestricted in sign
Primal Variable: Dual Relation:
x
j
≥ 0 (jth) Inequality: ≤
x
j
≤ 0 (jth) Inequality: ≥
x
j
unrestricted in sign (jth) Equation: =
Table 5-2: Correspondence Rules Between Primal and Dual LPs
The above primal system in detached coefficient form is displayed by reading across Ta-
ble 5-3. Its dual, obtained by applying the rules in Table 5-2, is displayed by reading down
in Table 5-3.
To see why this is the case, suppose we rewrite system (5.3) in its equivalent von
Neumann inequality form:
x
1
+(−x
2
)+ (x
3
− x
3
) ≥ min z
x
1
− 3(−x
2
)+ 4(x
3
− x
3
) ≥ 5(x
1
≥ 0,x
2
≥ 0,x
3
≥ 0,x
3
≥ 0)
−
x
1
− 3(−x
2
)+4(x
3
− x
3
)
≥−5
x
1
− 2(−x
2
) ≥ 3
−
2(−x
2
) − (x
3
− x
3
)
≥−4.
(5.4)
We write x
2
= −x
2
≥ 0; this changes the sign of x
2
. Also, we have written x
3
= x
3
−x
3
as
the difference of two nonnegative variables (see Section 6.2), and we have written the first
equation of (5.3) as equivalent to two inequalities, x
1
−3x
2
+4x
3
≥ 5 and x
1
−3x
2
+4x
3
≤ 5.
The relationship between the primal of (5.4) and its dual is displayed in Table 5-4.
Here it is convenient to let y
1
≥ 0 and y
1
≥ 0 be the dual variables corresponding
to the first two inequalities. Since coefficients of y
1
and y
1
differ only in sign in every
inequality, we may set y
1
− y
1
= y
1
, where y
1
can have either sign. Note next that the
coefficients in the inequalities of the dual corresponding to x
3
and x
3
differ only in sign,
which implies the equation
4(y
1
− y
1
) − y
3
=1, or 4y
1
− y
3
=1.
From these observations it is clear that Table 5-3 is stating more concisely the relations of
Table 5-4.