Freiling G., Yurko V. Lectures on Differential Equations of Mathematical Physics: A First Course
Подождите немного. Документ загружается.

52 G.
Freiling and V. Yurko
2) On I
2
: t = −x + x
0
+t
0
, d
t = −dx. Denote
α
2
(x) = u(x, −x + x
0
+t
0
), β
2
(x) = v(x, −x + x
0
+t
0
).
Then α
0
2
(x) = (u
x
−u
t
)
|t=−x+x
0
+t
0
, β
0
2
(x) = (v
x
−v
t
)
|t=−x+x
0
+t
0
, and consequently,
I
2
=
M
Q
(v(u
t
−u
x
) −u(v
t
−v
x
) −(a + b)uv)(x,−x + x
0
+t
0
)dx
=
M
Q
(−β
2
(x)α
0
2
(x) + α
2
(x)β
0
2
(x)
−(a + b)(x,−x + x
0
+t
0
)α
2
(x)β
2
(x))dx.
Integration by parts yields
I
2
= −
³
β
2
(x)α
2
(x)
´
¯
¯
¯
M
Q
+
M
Q
α
2
(x)
¡
2β
0
2
(x) −(a + b)(x,−x + x
0
+t
0
)β
2
(x)
¢
dx.
Impose a second condition on the function v(x,t), namely:
2β
0
2
(x) −(a + b)(x, −x + x
0
+t
0
)β
2
(x) = 0.
Solving this differential equation we calculate
v(x,−x + x
0
+t
0
) = exp
µ
1
2
x
x
0
(a + b)
(ξ
,−ξ + x
0
+t
0
)dξ
¶
. (2.4.6)
Then
I
2
= u(Q)v(Q) −u(M)v(M). (2.4.7)
3) On I
3
: t = 0, dt = 0, and consequently,
I
3
=
x
0
+t
0
x
0
−t
0
(v(x,0)ψ(x) −v
t
(x,0)ϕ(x) −b(x,0)v(x,0)ϕ(x)) dx. (2.4.8)
Impose a third condition on the function v(x,t), namely:
L
∗
v = 0, (x,t) ∈ ∆. (2.4.9)
Since (2.4.9), (2.4.4) and (2.4.6) is a Goursat problem, the function v(x,t) exists and is
unique, it is called the Riemann function. We note that v(x,t) = v(x,t; x
0
,t
0
), i.e. the
Riemann function depends on the point (x
0
,t
0
). Substituting (2.4.5), (2.4.7), (2.4.8) and
(2.4.9) into (2.4.3) and solving this with respect to u(x
0
,t
0
), we obtain
u(x
0
,t
0
) =
1
2
(ϕ(x
0
+t
0
)v(x
0
+t
0
,0)
+ ϕ
(x
0
−t
0
)v(x
0
−t
0
,0))
+
1
2
x
0
+t
0
x
0
−t
0
(v(x,0)ψ(x) −v
t
(x,0)ϕ(x) −b(x,0)v(x,0)ϕ(x)
) d
x
Hyperbolic P
artial Differential Equations 53
−
1
2
t
0
0
x
0
+t
0
−t
x
0
+t−t
0
v(x,t) f (x,t)d
x
dt. (2.4.10)
Formula (2.4.10) is called the Riemann formula. Thus, we have proved that if the solution
of problem (2.4.1)-(2.4.2) exists, then it is represented by formula (2.4.10). In particular,
this yields the uniqueness of the solution of problem (2.4.1)-(2.4.2). One can verify (see,
for example, [3, Ch.5]) that the function u, represented by (2.4.10), is really a solution of
problem (2.4.1)-(2.4.2). We note that the existence of the solution of problem (2.4.1)-(2.4.2)
can be proved independently by the method described in Section 2.3.
In some particular cases the Riemann function can be constructed explicitly.
Example 2.4.1. Consider the following Cauchy problem for the non-homogeneous
equation of a vibrating string:
u
xx
−u
tt
= f (x,t), −∞ < x < ∞, t > 0,
u
|t=0
= ϕ(x), u
t|t=0
= ψ(x).
)
(2.4.11)
This is the particular case of problem (2.4.1)-(2.4.2) when a = b = c = 0. Clearly, in this
case v(x,t) ≡ 1, and the Riemann formula (2.4.10) takes the form
u(x,t) =
1
2
(ϕ(x + t)
+ ϕ
(x −t)) +
1
2
x+t
x−t
ψ(s)d
s
−
1
2
t
0
x+t−τ
x−t+τ
f (s, τ)d
s
dτ. (2.4.12)
Compare (2.4.12) with (2.1.11)!
Example 2.4.2. Consider the Cauchy problem (2.4.1)-(2.4.2) for the case, when the
coefficients a,b and c are constants. Without loss of generality one can assume that a =
b = 0 (this can always be achieved by the replacement u(x,t) = ˜u(x,t) exp(−ax/2+bt/2) ).
Thus, we consider the following Cauchy problem
u
xx
−u
tt
+ cu = f (x,t), −∞ < x < ∞, t > 0; c 6= 0,
u
|t=0
= ϕ(x), u
t|t=0
= ψ(x).
)
(2.4.13)
For the Riemann function we have the Goursat problem
v
xx
−v
tt
+ cv = 0,
v
|t=x−x
0
+t
0
= 1, v
|t=−x+x
0
+t
0
= 1.
)
(2.4.14)
We seek a solution of (2.4.14) in the form
v(x,t) = w(z), where z =
q
(t −t
0
)
2
−(x −x
0
)
2
.
Clearly
,
if the point (x,t) lies on the characteristics I
1
or I
2
, then z = 0, moreover z > 0
inside the triangular ∆(x
0
,t
0
). Since
∂z
∂t
=
t −t
0
z
,
∂z
∂x
= −
x −x
0
z
,
54 G.
Freiling and V. Yurko
we ha
ve
v
x
= −w
0
x −x
0
z
, v
x
x
= w
00
(x −x
0
)
2
z
2
−w
0
1
z
−w
0
(x −x
0
)
2
z
3
,
v
t
= w
0
t −t
0
z
, v
t
t
= w
00
(t −t
0
)
2
z
2
+ w
0
1
z
−w
0
(t −t
0
)
2
z
3
.
Substituting
this
into (2.4.14) we obtain
w
00
(z) +
w
0
(z)
z
−cw(z)
= 0
, w(0) = 1. (2.4.15)
The replacement ξ =
√
−cz, y(ξ)
= w(
z) in (2.4.15) yields
y
00
(ξ) +
y
0
(ξ)
ξ
+ y(ξ)
= 0
, y(0) = 1,
and consequently,
y(ξ) = J
0
(ξ),
where
J
0
(ξ) := 1 −
µ
ξ
2
¶
2
+
1
(2!)
2
µ
ξ
2
¶
4
−
1
(3!)
3
µ
ξ
2
¶
6
+ ·
·
·
is the Bessel function of zero order [1, p.636]. Thus, the Riemann function has the form
v(x,t) = J
0
µ
q
−c(
(t −t
0
)
2
−(x −x
0
)
2
)
¶
.
2.5.
The Cauchy Problem for the Wave Equation
We consider the following Cauchy problem
u
tt
= ∆u, x ∈R
3
, t > 0, (2.5.1)
u
|t=0
= ϕ(x), u
t|t=0
= ψ(x). (2.5.2)
Here x = (x
1
,x
2
,x
3
) ∈R
3
, t ≥ 0 are independent variables, u(x,t) is an unknown function
and
∆u :=
3
∑
k=1
∂
2
u
∂x
2
k
is
the
Laplace operator. Denote D = {(x,t) : x ∈R
3
, t ≥ 0}.
Definition 2.5.1. A function u(x,t) is called a solution of (2.5.1)-(2.5.2), if u(x,t) ∈
C
2
(D), and u(x,t) satisfies (2.5.1)-(2.5.2).
Fix a point x
0
= (x
0
1
,x
0
2
,x
0
3
) ∈ R
3
and denote by
r = kx −x
0
k =
s
3
∑
k=1
(x
k
−x
0
k
)
2
Hyperbolic P
artial Differential Equations 55
the distance
between the points x and x
0
. Let K(x
0
,α) := {x ∈R
3
: r ≤α} be the closed
ball of the radius α with center x
0
, and let here and below ∂K(x
0
,α) := {x ∈R
3
: r = α}
be the corresponding sphere (the boundary of the ball K(x
0
,α) ).
Lemma 2.5.1. ∆
µ
1
r
¶
= 0.
Pr
oof
. Since
∂r
∂x
k
=
x
k
−x
0
k
r
,
we
ha
ve
∂
∂x
k
µ
1
r
¶
= −
x
k
−x
0
k
r
3
,
∂
2
∂x
2
k
µ
1
r
¶
= −
1
r
3
+
3(x
k
−x
0
k
)
2
r
5
,
and
consequently
, ∆
µ
1
r
¶
= 0. 2
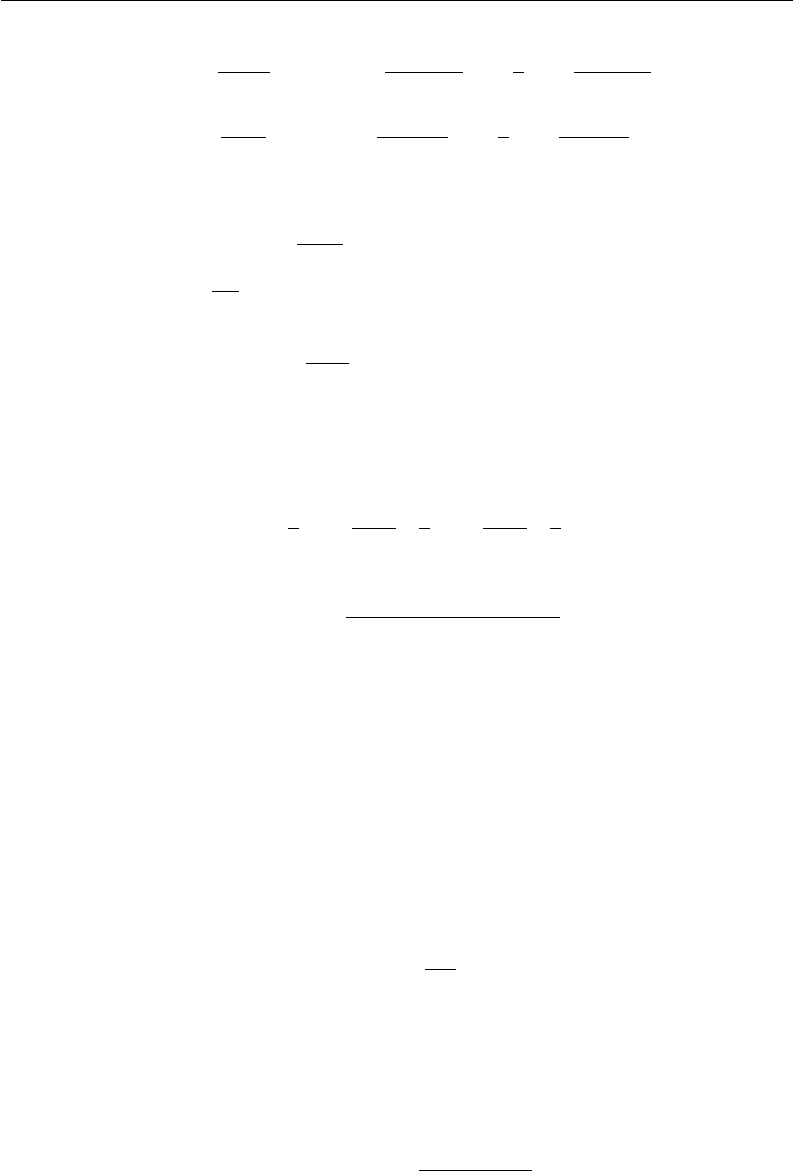
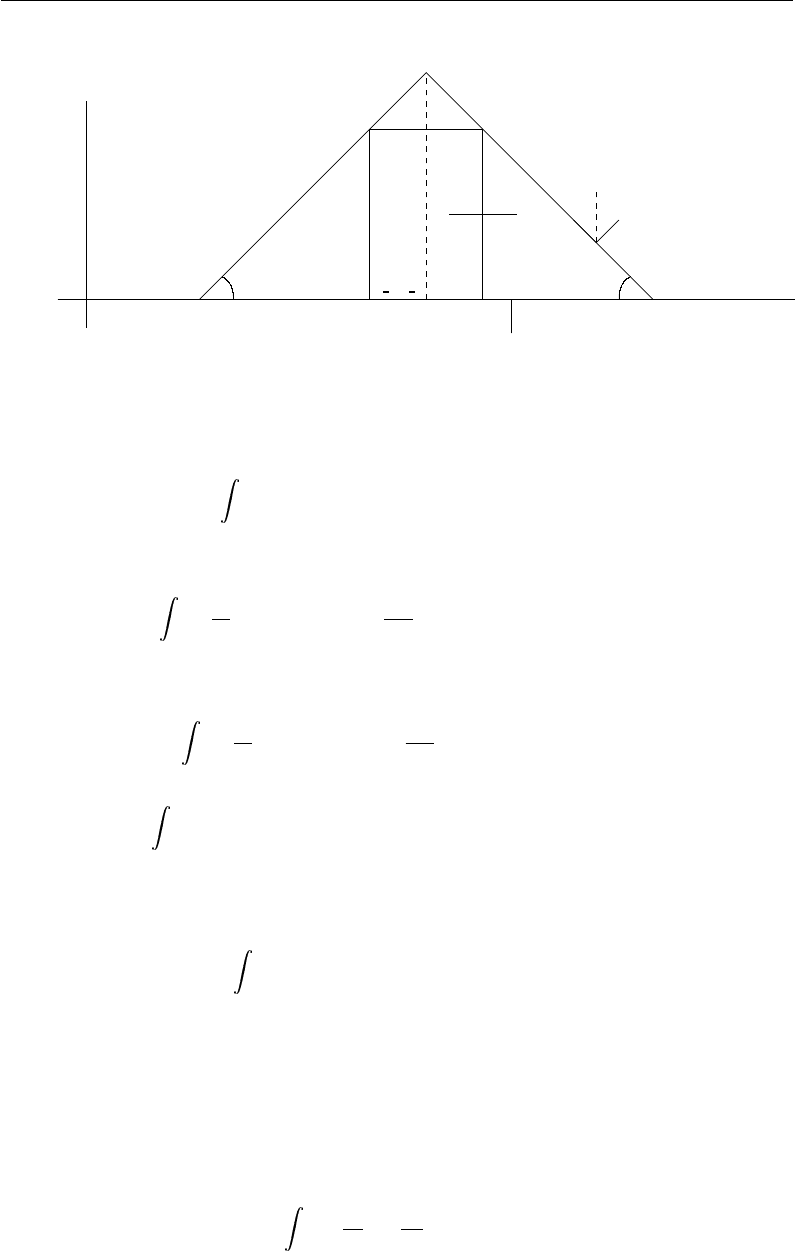
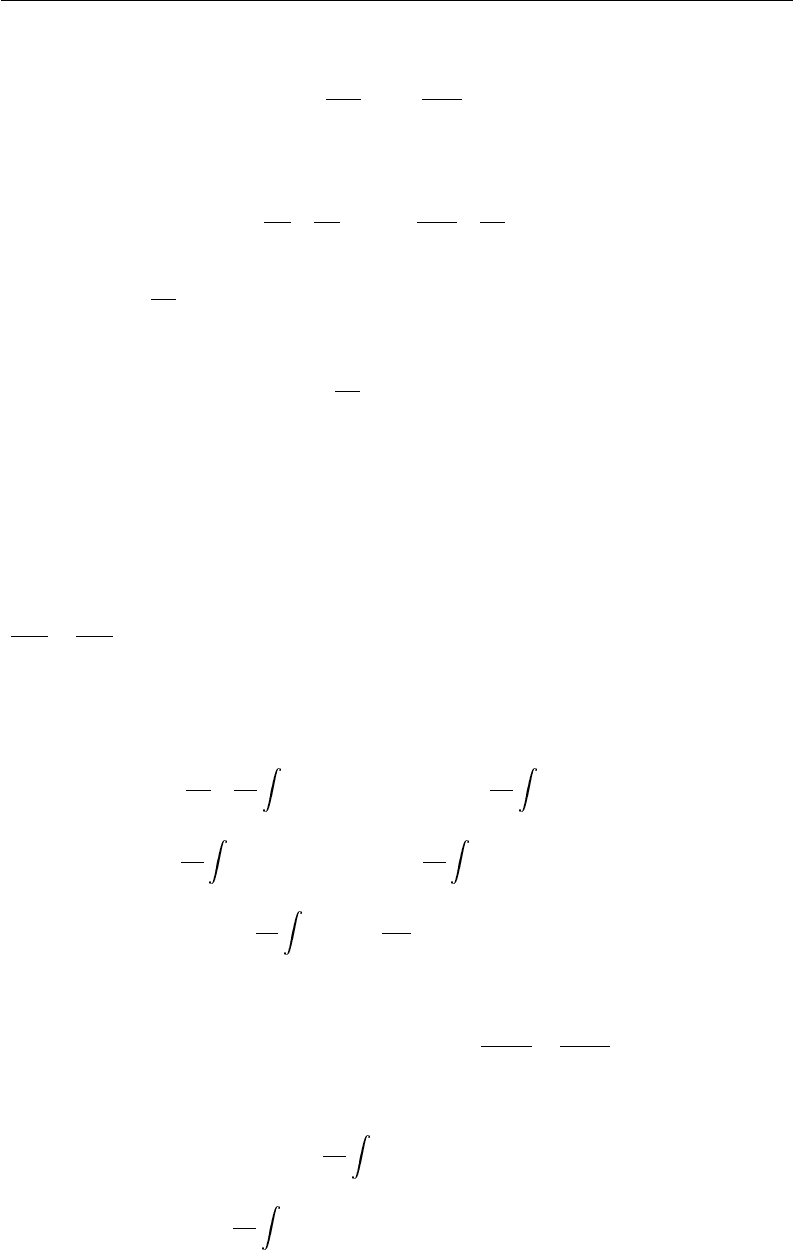
Derivation
of
Kirchhoff’s formula. Fix a point (x
0
,t
0
) ∈ R
4
. In the four-dimensional
space of variables (x,t) we consider the cone G with the vertex at the point (x
0
,t
0
), the
generator t
0
−t = r and the base K(x
0
,t
0
), in the hyper-plane t = 0 (see fig. 2.5.1). Put
v(x,t) =
t
0
−t
r
−1.
By
virtue
of Lemma 2.5.1, the function v(x,t) satisfies equation (2.5.1):
v
tt
= ∆v.
Moreover, v(x,t) ≥ 0 inside the cone G, and v(x,t) = 0 on the lateral surface of G. On
the axis of the cone we have x = x
0
, and the function v(x,t) has a singularity.
Fix δ > 0. Denote by
Ω(x
0
,δ) = {(x,t) ∈ R
4
: r ≤ δ, t ≥ 0}
the cylinder with the axis x = x
0
and of radius δ, and consider the domain G
δ
= G \
Ω(x
0
,δ) which is the cone without the cylinder (see fig. 2.5.1). The boundary S
δ
of G
δ
consists of three parts:
S
δ
= S
1,δ
∪S
2,δ
∪S
3,δ
,
where
S
1,δ
= {(x,t) : t = 0, δ ≤ r ≤t
0
},
S
2,δ
= {(x,t) : t
0
−t = r, 0 ≤t ≤t
0
−δ}
is the lateral surface of the cone, and
S
3,δ
= {(x,t) : r = δ, 0 ≤t ≤t
0
−δ}
is the lateral surface of the cylinder.
56 G.
Freiling and V. Yurko
6
-
t
x
(x
0
,t
0
)
S
1,δ
S
2,δ
S
1,δ
t
0
−t = r
δ
x
0
-
l
¾
n
?n = l
µ
n
I
l
z}|{
45
o
45
o
fig.
2.5.1
Suppose
that the solution u(x,t) of problem (2.5.1)-(2.5.2) exists. Since u
tt
−∆u and
v
tt
−∆v , it follows that
G
δ
(u(v
tt
−∆v) −v(u
tt
−∆u)) dxdt = 0,
and consequently,
G
δ
Ã
∂
∂t
(uv
t
−vu
t
) −
3
∑
k=1
∂
∂x
k
(uv
x
k
−vu
x
k
)
!
d
x
dt = 0.
Using the Gauß-Ostrogradskii formula , we calculate
G
δ
Ã
∂
∂t
(uv
t
−vu
t
) −
3
∑
k=1
∂
∂x
k
(uv
x
k
−vu
x
k
)
!
d
x
dt
=
S
δ
Ã
(uv
t
−vu
t
)cos(n,t) −
3
∑
k=1
(uv
x
k
−vu
x
k
)cos(n,x
k
)
!
ds,
where n is the outer normal to the surface, and cos(n,t) and cos(n, x
k
) are the cosines of
the angles between the outer normal and the corresponding coordinate axes. Consequently,
S
δ
¡¡
v
t
cos(n,t) −
3
∑
k=1
v
x
k
cos(n,x
k
)
´
u
−v
³
u
t
cos(n,t) −
3
∑
k=1
u
x
k
cos(n,x
k
)
´´
ds = 0.
Choose the direction l such that
cos(l,t) = cos(n,t), cos(l,x
k
) = −cos(n,x
k
).
Then
S
δ
µ
u
∂v
∂l
−v
∂u
∂l
¶
d
s = 0
. (2.5.3)
Hyperbolic P
artial Differential Equations 57
1)
On S
1,δ
: n = l,
∂
∂l
= −
∂
∂t
, d
s = d
x, t = 0, and consequently,
S
1,δ
µ
u
∂v
∂l
−v
∂u
∂l
¶
d
s =
S
1
,δ
µ
−u
∂v
∂t
+ v
∂u
∂t
¶
d
x
=
S
1
,δ
µ
ϕ(x)
r
+
³
t
0
r
−1
´
ψ(x)
¶
d
x.
As δ →0
we get
lim
δ→0
S
1,δ
µ
u
∂v
∂l
−v
∂u
∂l
¶
d
s =
K(x
0
,t
0
)
µ
ϕ
(x)
r
+
³
t
0
r
−1
´
ψ(x)
¶
d
x. (2
.5.4)
2) On S
2,δ
the direction l coincides with the direction of the generator of the cone,
hence v =
∂v
∂l
= 0 on S
2,δ
.
This
yields
S
2,δ
µ
u
∂v
∂l
−v
∂u
∂l
¶
d
s = 0
. (2.5.5)
3) On S
3,δ
: r = δ. Then
S
3,δ
v
∂u
∂l
d
s =
t
0
−δ
0
µ
t
0
−t
δ
−1
¶
d
t
∂
K(x
0
,δ)
∂u
∂l
d
s
.
Since
¯
¯
¯
¯
∂u
∂l
¯
¯
¯
¯
≤C, we
ha
ve
¯
¯
¯
¯
S
3,δ
v
∂u
∂l
d
s
¯
¯
¯
¯
≤ 4
πδ
2
C
t
0
−δ
0
µ
t
0
−t
δ
−1
¶
d
t ≤C
1
δ
,
and consequently,
lim
δ→0
S
3,δ
v
∂u
∂l
d
s = 0
.
Furthermore, on S
3,δ
: l = −n = ¯r := (x
1
−x
0
1
,x
2
−x
0
2
,x
3
−x
0
3
). Therefore
∂
∂l
=
∂v
∂r
and
S
3,δ
u
∂v
∂l
d
s =
S
3
,δ
u
∂v
∂r
d
s =
S
3
,δ
µ
−
t
0
−t
r
2
¶
u
d
s
= −
1
δ
2
t
0
−δ
0
(t
0
−t) d
t
∂
K(x
0
,δ)
u(x,t)ds
= −4π
t
0
−δ
0
(t
0
−t)u(x
0
,t) dt + J
δ
,
where
J
δ
= −
1
δ
2
t
0
−δ
0
(t
0
−t) d
t
∂
K(x
0
,δ)
(u(x,t) −u(x
0
,t)) ds.
58 G.
Freiling and V. Yurko
By virtue
of the continuity of u(x,t), for each ε > 0 there exists δ > 0 such that if r ≤ δ,
then |u(x,t) −u(x
0
,t)| ≤ ε for all t ∈ [0,t
0
]. Therefore,
|J
δ
| ≤
ε
δ
2
t
0
−δ
0
(t
0
−t) d
t
∂K(x
0
,δ
)
ds ≤ 4πε
t
0
0
(t
0
−t) dt.
Thus,
lim
δ→0
S
3,δ
µ
u
∂v
∂l
−v
∂u
∂l
¶
d
s = −4
π
t
0
0
(t
0
−t)u(x
0
,t) dt. (2.5.6)
It follows from (2.5.3)-(2.5.6) that
t
0
0
(t
0
−t)u(x
0
,t) dt =
1
4π
K(x
0
,t
0
)
µ
ϕ(x)
r
+
³
t
0
r
−1
´
ψ(x)
¶
d
x. (2
.5.7)
Differentiating (2.5.7) twice with respect to t
0
, we calculate
u(x
0
,t
0
) =
1
4π
∂
2
∂t
2
0
µ
t
0
0
d
r
∂K(
x
0
,r)
µ
ϕ(x)
r
+
³
t
0
r
−1
´
ψ(x)
¶
d
s
¶
or
u
(x
0
,t
0
) =
1
4π
∂
∂t
0
∂K(x
0
,t
0
)
ϕ(x)
t
0
d
s +
1
4π
∂K(x
0
,t
0
)
ψ(x)
t
0
d
s
. (2.5.8)
Formula (2.5.8) is called Kirchhoff’s formula. Thus, we have proved that if the solution of
problem (2.5.1)-(2.5.2) exists, then it is represented by (2.5.8). In particular, this yields the
uniqueness of the solution of problem (2.5.1)-(2.5.2).
Theorem 2.5.1. Let ϕ(x) ∈C
3
(R
3
), ψ(x) ∈C
2
(R
3
). Then the solution of the Cauchy
problem (2.5.1) −(2.5.2) exists, is unique and is represented by formula (2.5.8) .
Proof. It is sufficient to prove that the function u(x,t), defined by (2.5.8), satisfies
(2.5.1)-(2.5.2). For this purpose we consider the following auxiliary function
w(x
0
,t
0
) =
1
4π
∂K(x
0
,t
0
)
f (x)
t
0
d
s
, (2.5.9)
where f (x) is a sufficiently smooth function. In (2.5.9) we make the replacement x
k
=
x
0
k
+ t
0
ξ
k
, k =
1,3 (i.e. ξ
k
=
x
k
−x
0
k
t
0
).
If x belongs
to the sphere ∂K(x
0
,t
0
), then ξ
belongs to the sphere ∂K(0,1), and ds
x
= t
2
0
ds
ξ
. Consequently,
w(x
0
,t
0
) =
t
0
4π
∂K(0,1)
f (x
0
+t
0
ξ)d
s. (
2.5.10)
It follows from (2.5.10) that the function w(x
0
,t
0
) has the same smoothness properties as
f (x), and
w
|t
0
=0
= 0. (2.5.11)
Differentiating (2.5.10) we get
∂w
∂t
0
=
1
4π
∂K(0,1)
f (x
0
+t
0
ξ)d
s
Hyperbolic P
artial Differential Equations 59
+
t
0
4π
∂K(0,1)
Ã
3
∑
k=1
∂ f
∂x
k
(x
0
+t
0
ξ) ·ξ
k
!
d
s. (
2.5.12)
In particular, (2.5.12) yields
∂w
∂t
0
¯
¯
¯
t
0
=0
= f (x
0
). (2.5.13)
W
e
note that in (2.5.12) ξ
k
= cos(n,ξ
k
). Therefore, applying the Gauß-Ostrogradskii for-
mula and using (2.5.10) and the relation
∂
∂ξ
k
= t
0
∂
∂x
k
, we
obtain
∂w
∂t
0
=
w(x
0
,t
0
)
t
0
+
t
0
4π
K(0,1)
Ã
3
∑
k=1
∂
∂ξ
k
µ
∂ f
∂x
k
(x
0
+t
0
ξ)
¶
!
dξ
=
w(x
0
,t
0
)
t
0
+
t
2
0
4π
K(0,1)
Ã
3
∑
k=1
∂
2
f
∂x
2
k
(x
0
+t
0
ξ)
!
dξ
=
w(x
0
,t
0
)
t
0
+
1
4πt
0
K(x
0
,t
0
)
Ã
3
∑
k=1
∂
2
f
∂x
2
k
(x)
!
d
x.
Thus,
∂
w
∂t
0
=
w(x
0
,t
0
)
t
0
+
1
4πt
0
Q, (2.5.14)
where
Q :=
K(x
0
,t
0
)
Ã
3
∑
k=1
∂
2
f
∂x
2
k
(x)
!
d
x =
t
0
0
d
r
∂K(x
0
,r)
Ã
3
∑
k=1
∂
2
f
∂x
2
k
(x)
!
d
s
.
Using (2.5.14) we calculate
∂
2
w
∂t
2
0
=
1
t
0
·
∂w
∂t
0
−
w
t
2
0
−
1
4πt
2
0
Q +
1
4πt
0
·
∂
∂t
0
Q
=
1
t
0
µ
w
t
0
+
1
4πt
0
Q
¶
−
w
t
2
0
−
1
4πt
2
0
Q +
1
4πt
0
·
∂
∂t
0
Q =
1
4πt
0
·
∂
∂t
0
Q,
and
consequently
,
∂
2
w
∂t
2
0
=
1
4πt
0
∂K(x
0
,t
0
)
Ã
3
∑
k=1
∂
2
f
∂x
2
k
(x)
!
d
s
. (2.5.15)
In particular, this yields (as in the proof of (2.5.11)):
∂
2
w
∂t
2
0
¯
¯
¯
t
0
=0
= 0. (2.5.16)
Dif
f
erentiating (2.5.10) twice with respect to x
0
k
, we calculate
∂
2
w
∂x
0
2
k
=
t
0
4π
∂K(0,1)
∂
2
f
∂x
2
k
(x
0
+t
0
ξ)d
s =
1
4πt
0
∂K(x
0
,t
0
)
∂
2
f
∂x
2
k
(x)d
s
.
60 G.
Freiling and V. Yurko
Together
with (2.5.15) this yields
∂
2
w
∂t
2
0
=
3
∑
k=1
∂
2
w
∂x
0
2
k
, (
2.5.17)
i.e. the function w satisfies the wave equation. Moreover, using (2.5.1) we deduce
∂
2
∂t
2
0
µ
∂w
∂t
0
¶
=
3
∑
k=1
∂
2
∂x
0
2
k
µ
∂w
∂t
0
¶
, (2.5.18)
i.e.
the
function
∂w
∂t
0
also
satisfies
the wave equation.
Formula (2.5.8) has the form
u(x
0
,t
0
) =
∂
∂t
0
w
1
(x
0
,t
0
)
+ w
2
(x
0
,t
0
),
where
the functions w
1
and w
2
have the form (2.5.9) with f = ϕ and f = ψ, respec-
tively. Therefore, it follows from (2.5.11), (2.5.13) and (2.5.16)-(2.5.18) that the function
u, defined by (2.5.8), satisfies (2.5.1) and (2.5.2). Theorem 2.5.1 is proved. 2
Let us study the stability of the solution of the problem (2.5.1)-(2.5.2).
Definition 2.5.2. The solution of problem (2.5.1)-(2.5.2) is called stable if for each
ε > 0 and T > 0 there exists δ = δ(ε,T ) such that if |ϕ(x)−
˜
ϕ(x)|≤δ , |ψ(x)−
˜
ψ(x)|≤δ ,
¯
¯
¯
∂ϕ(x)
∂x
k
−
∂
˜
ϕ(x)
∂x
k
¯
¯
¯
≤ δ for
all x ∈ R
3
, then |u
(x,t) − ˜u(x,t)| ≤ ε for all x ∈ R
3
, 0 ≤ t ≤ T.
Here ˜u(x,t) is the solution of the Cauchy problem with the initial data
˜
ϕ and
˜
ψ.
Let us show that the solution of problem (2.5.1)-(2.5.2) is stable. Indeed, we rewrite
(2.5.8) in the form
u(x
0
,t
0
) =
∂
∂t
0
µ
t
0
4π
∂K(0,1)
ϕ(x
0
+t
0
ξ)d
s
¶
+
t
0
4π
∂K(0,1)
ψ(x
0
+t
0
ξ)d
s
=
t
0
4π
∂K(0,1)
ψ(x
0
+t
0
ξ)d
s +
1
4π
∂K(0,1)
ϕ(x
0
+t
0
ξ)d
s
+
t
0
4π
∂K(0,1)
3
∑
k=1
∂ϕ
∂x
k
(x
0
+t
0
ξ) ·ξ
k
d
s
.
For ε > 0, T > 0 choose δ = ε/(4T + 1) and suppose that
|ϕ(x) −
˜
ϕ(x)| ≤ δ, |ψ(x) −
˜
ψ(x)| ≤ δ,
¯
¯
¯
¯
∂ϕ(x)
∂x
k
−
∂
˜
ϕ(x)
∂x
k
¯
¯
¯
¯
≤ δ
for
all x ∈R
3
. Then
|u
(x
0
,t
0
) − ˜u(x
0
,t
0
)| ≤
t
0
4π
∂K(0,1)
|ψ(x
0
+t
0
ξ) −
˜
ψ(x
0
+t
0
ξ)|d
s
+
1
4π
∂K(0,1)
|ϕ(x
0
+t
0
ξ) −
˜
ϕ(x
0
+t
0
ξ)|d
s
Hyperbolic P
artial Differential Equations 61
+
t
0
4π
∂K(0,1)
¯
¯
¯
¯
¯
3
∑
k=1
µ
∂ϕ
∂x
k
−
∂
˜
ϕ
∂x
k
¶
(x
0
+t
0
ξ) ·ξ
k
¯
¯
¯
¯
¯
d
s ≤ δ
(4T + 1) = ε.
Thus, the Cauchy problem (2.5.1)-(2.5.2) is well-posed.
Hadamard’s method of descent
1) We consider the Cauchy problem for the two-dimensional wave equation:
u
tt
= ∆u, x ∈R
2
, t > 0, (2.5.19)
u
|t=0
= ϕ(x), u
t|t=0
= ψ(x). (2.5.20)
Here x = (x
1
,x
2
) ∈R
2
, t ≥0 are independent variables, u(x
1
,x
2
,t) is an unknown function
and ∆u :=
∂
2
u
∂x
2
1
+
∂
2
u
∂x
2
2
is
the
two-dimensional Laplace operator. The solution of problem
(2.5.19)-(2.5.20) can be obtained by a method which is similar to the one used above. How-
ever, it is more convenient to obtain the solution of problem (2.5.19)-(2.5.20) directly from
Kirchhoff’s formula (2.5.8) (i.e. consider problem (2.5.19)-(2.5.20) as a particular case of
problem (2.5.1)-(2.5.2)).
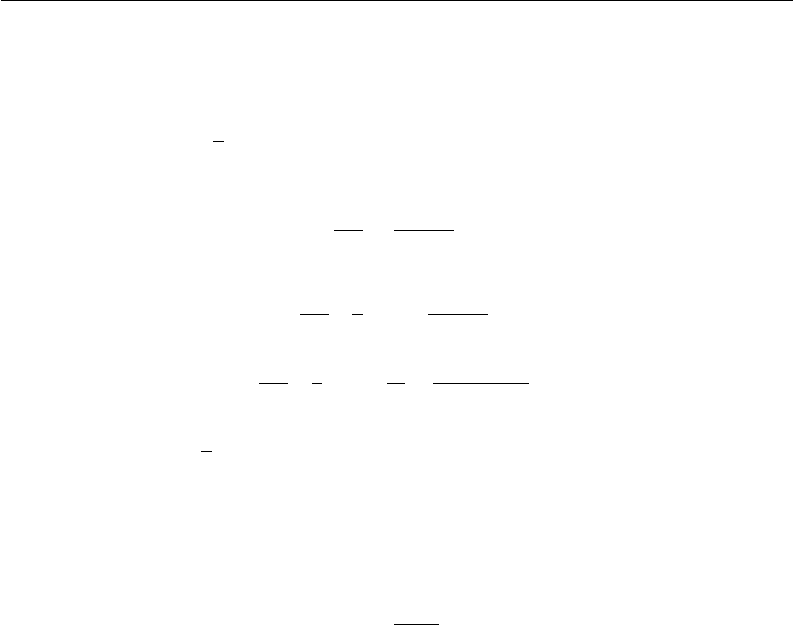
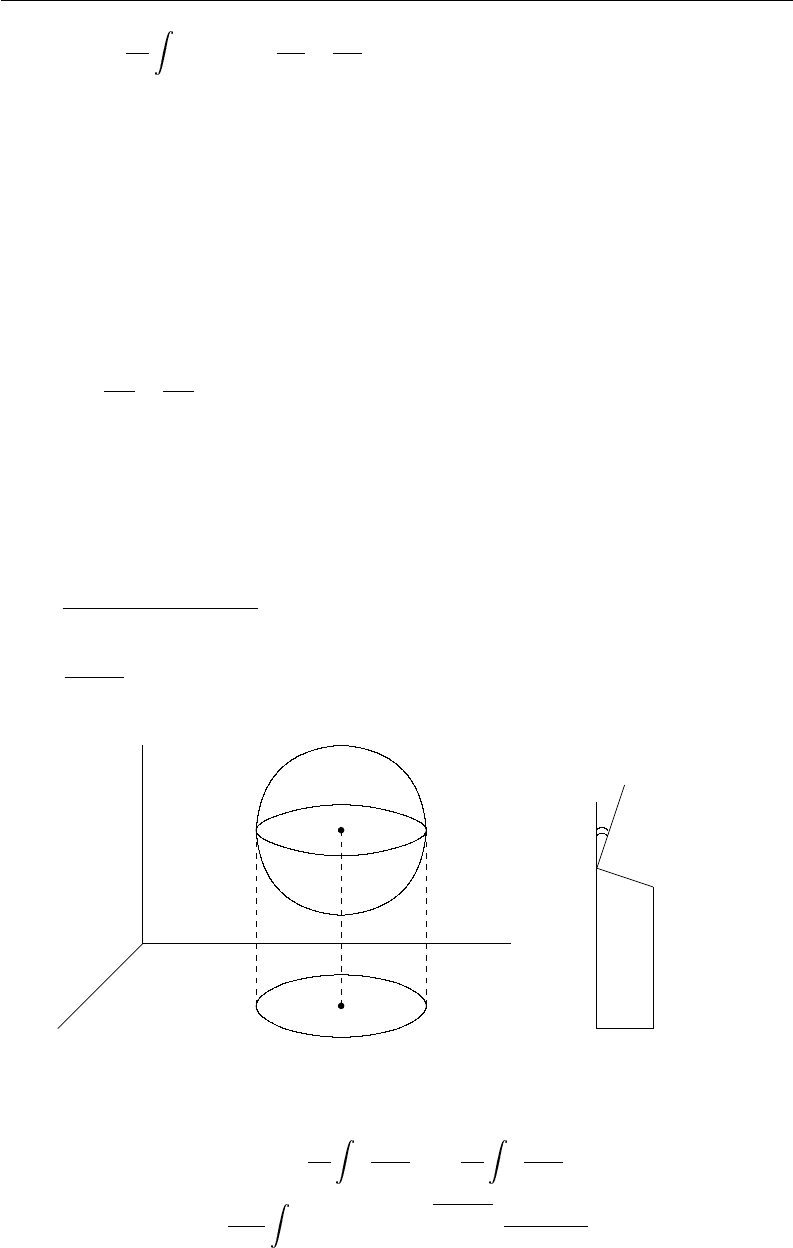
For this purpose we consider problem (2.5.1)-(2.5.2) and suppose that the functions ϕ
and ψ do not depend on x
3
. Let us show that in this case the function u(x
0
,t
0
), defined
by (2.5.8), does not depend on x
0
3
, i.e. it is a solution of problem (2.5.19)-(2.5.20). Denote
ρ =
q
(x
1
−x
0
1
)
2
+
(x
1
−x
0
1
)
2
, σ = σ
(x
0
1
,x
0
2
,t
0
) = {(x
1
,x
2
) : ρ ≤ t
0
} is the disc of radius
t
0
with center (x
0
1
,x
0
2
). Since ∂K(x
0
,t
0
) = S
+
∪S
−
, where S
±
are the half-spheres x
3
=
x
0
3
±
q
t
2
0
−ρ
2
(see
fig.
2.5.2), it follows from (2.5.9) that
6
-
ª
x
3
x
2
(x
0
1
,x
0
2
)
x
1
x
0
S
+
S
−
σ
K(x
0
,t
0
)
±
n
d
s
Figure
2.5.2.
w
(x
0
,t
0
) =
1
4π
S
+
f (x)
t
0
d
s +
1
4π
S
−
f (x)
t
0
d
s
=
1
4πt
0
σ
f (x
1
,x
2
,x
0
3
+
q
t
2
0
−ρ
2
)
d
x
1
d
x
2
cos(n,x
3
)