Грехов В.П., Зарицкий М.Н., Ключникова Г.А., Куприков А.В. Теория автоматического управления
Подождите немного. Документ загружается.

Частота сопряжения среднечастотного и высокочастотного участков
С
должна быть в
2,5-3 раза выше частоты среза
ср ж
, т.е.
е
=2,5
66,5=167 1/с.
66
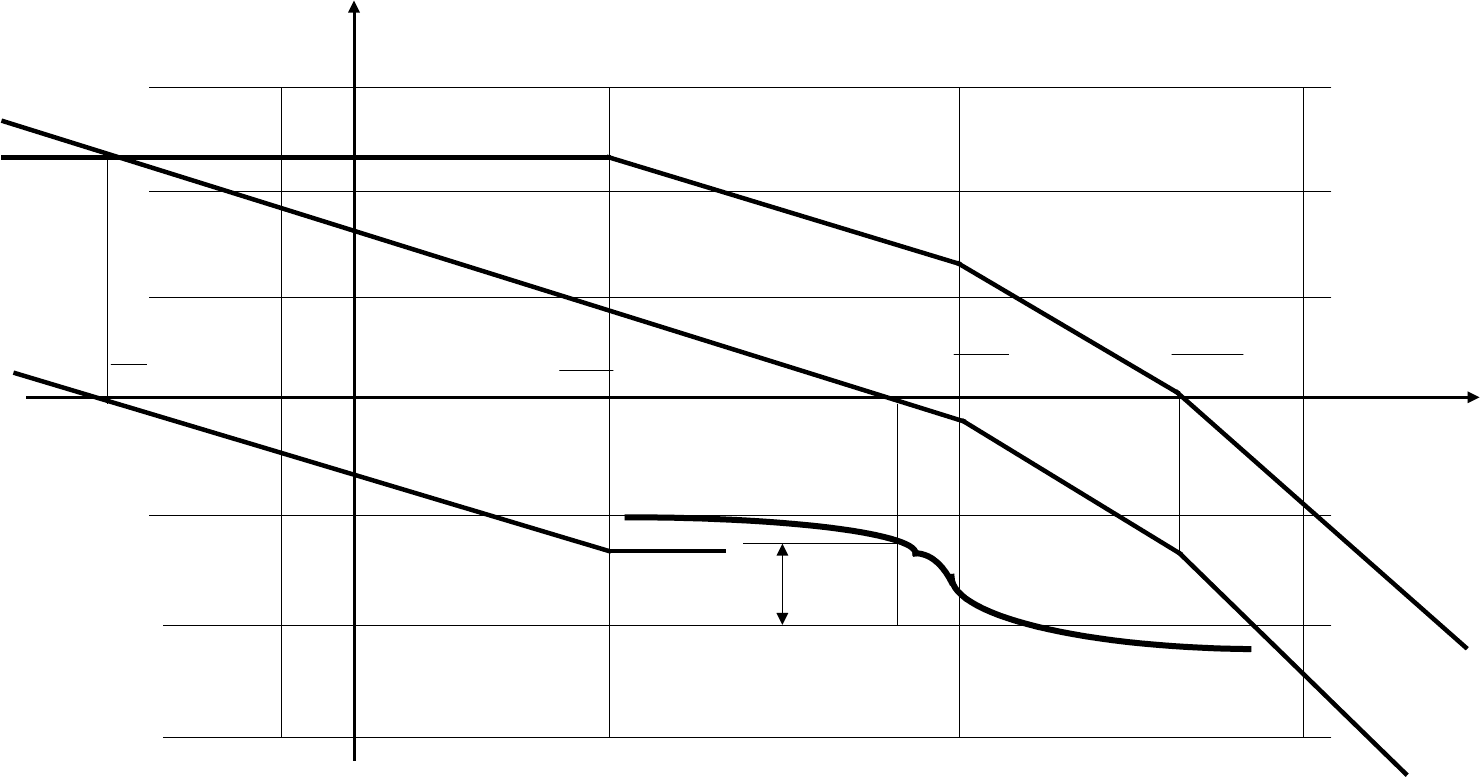
Рис. 5.14 Частотные характеристики системы электропривода
-20
-40
-60
ср ж
1000
ку
ку
Т
1
ж
L
ку
L
ж
L
некор
1
Т
1
ТП
Т
1
2
Т
1
100
1
10
,
-270
-180
-90
20
40
60
L, дБ
ср ж
, с
-1
65

Постоянная времени Т
е
=1/
е
=1/167=0,006 с.
Из данных неизменяемой части системы
006,0
2
012,0004,0
2
ТТ
Т
2ТП
е
с.
Таким образом:
232
ж
)1р106(р105,1
1
)р(W
UооUз
Определение передаточной функции корректирующего устройства
Передаточная функция корректирующего устройства находится из соотношения
исх
Ж
ку
)p(W
)p(W
)p(W
Следовательно, корректирующее устройство должно иметь передаточную функцию
2
2иу
21ТП
жку
)1рТ(рТК
)1рТ)(1рТ)(1рТ(
)p(W
,
где Т
ТП
=4
10
-3
с, Т
1
=8,3
10
-2
; Т
2
=1,2
10
-2
сек,
К
У
=
1
30
0,5
0,1=1,5.
Можно приближенно считать, что
(Т
ТП
р+1)(Т
2
р+1)
(Т
е
р+1)
2
Так как 0,48
10
-4
р
2
+1,46
10
-2
р+1
0,36
10
-4
р
2
+1,2
10
-2
р+1.
Поэтому упрощенная передаточная функция корректирующего устройства
рТ
1рТ
)p(W
ку
и
1
упрку
,
где Т
и ку
=К
у
Т
и
=1,5
0,015=0,0225 сек.
Передаточная функция системы регулирования с желаемой упрощенной передаточной
функцией по задающему сигналу
1рТрТТ2р)Т(Т
1
1)1рТ(рТ
1
)р(W
и
2
еи
32
еи
2
2и
ж
3
UооUз
.
При такой передаточной функции время переходного процесса отработки ступенчатого
задающего воздействия t
пп
(6
7)Т
и
7
1
10
-2
0,1 сек.
Полученное время t
пп
в 1,5 раза меньше, чем в технических требованиях
5,1
1,0
5,1
t
t
пп
пп
ж
.
(5.37)
(5.38)
67
Следовательно, с целью уменьшения перерегулирования в переходном процессе
целесообразно уменьшить значение
ср ж
, и считать, что расчетное значение
ср
расч
=66,5/1,5
50 1/сек.
Этой частоте среза соответствует постоянная времени интегрирования Т
и
=0,02 сек.
Расчетные передаточные функции скорректированной системы регулирования
1р102р104,2р1072,0
10
1рТрТТ2р)Т(Т
К/1
)p(W
22436
и
2
еир
32
еи
ос
расч
Uз
,
1р102р104,2р1072,0
)1рТ(рК
)p(W
22436
ТПм
Мсрасч
,
где К
м
= Т
и ку
/ К
я
С
м
К
ТП
- коэффициент передачи по моменту М
с
.
Для оценки величины перерегулирования следует вычислить запас по фазе на частоте
среза разомкнутого контура с расчетными параметрами
=180 – 90 – 2 arctg
ср
Te = 90 - 2arctg50
60
10
-3
= 90 – 33 = 57
.
Следовательно, перерегулирование в переходном процессе не будет превышать
требуемого значения
15%.
Техническая реализация корректирующего устройства
Корректирующее звено представляет собой интегро-форсирующее звено (ПИ - звено).
Поэтому его целесообразно выполнить в виде активного динамического звена на базе ОУ по
схеме рис. 5.13.
Его передаточная функция имеет следующий вид
рТ
1рТ
)р(
)р(U
)p(W
куи
1
уТП
,
где Т
1
=С
ос
R
ос
, Т
и
=С
ос
R
вх
,
расчетные значения Т
1
=0,083с;
с03,05,102,0К
1
Т
жср
куи
Выбрав стандартное значение емкости С
ос,
можно рассчитать требуемые величины
резисторов R
ос
и R
вх
, так чтобы они не превышали значение 1 МОм.
Задачу синтеза системы регулирования можно считать завершенной. Для расчета
переходных процессов отработки задающего сигнала и возмущения М
с
целесообразно
(5.39)
(5.40)
68
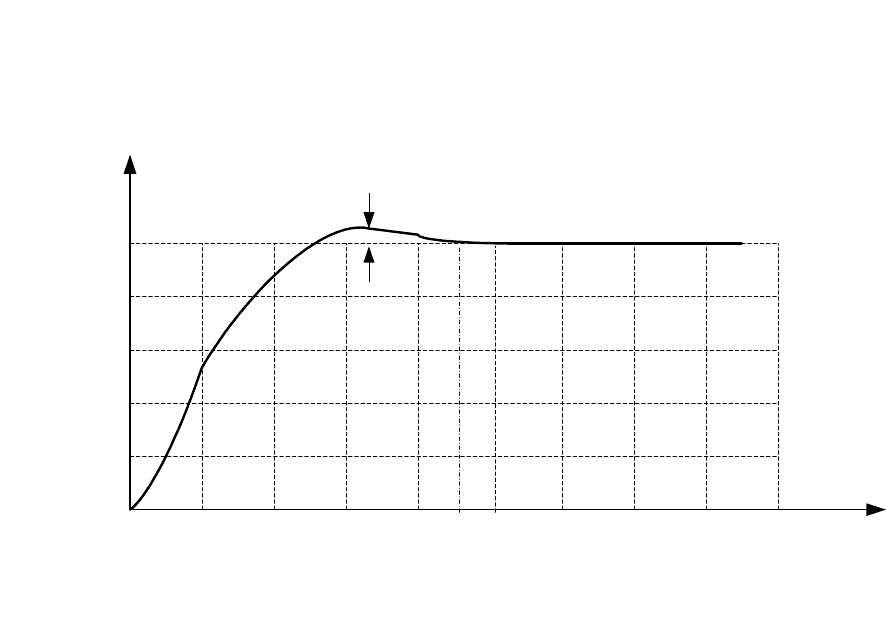
воспользоваться компьютерной учебной программой «Полином». Переходная функция
tf
з
U
при отработке ступенчатого задающего сигнала приведена на рис. 5.6. Из этого
графика видно, что динамические свойства системы регулирования скорости соответствуют
техническим требованиям, т.к. t
пп
=0,09 с,
=8 %, п
к
=1.
Рис. 5.16 График переходной функции отработки задающего воздействия
в синтезированной системе электропривода
tf
з
U
6. Многоконтурные системы регулирования
6.1. Многоконтурные системы с подчиненным
регулированием координат
Для решения задач синтеза замкнутых систем регулирования, обладающих хорошим
быстродействием и желаемым характером переходных процессов, разработан инженерный
метод синтеза, получивший название метода последовательной коррекции с подчиненным
регулированием координат или сокращенно метод подчиненного регулирования. В основе
этого метода лежит разработка многоконтурных систем, когда в результате синтеза каждый из
контуров описывается передаточной функцией второго или третьего порядка и обеспечивает
оптимальное управление своей выходной регулируемой координатой.
Для построения такой системы в структурной схеме неизменяемой части системы
выделяют последовательность динамических звеньев, каждое из которых имеет на своем
выходе соответствующую регулируемую координату, в электроприводах это: ток (I), скорость
(
), угол поворота (
) или путь (s). После этого синтезируют контуры регулирования, начиная
с контура тока - первой внутренней координаты. Синтез обычно выполняется с
использованием активных последовательных корректирующих звеньев (регуляторов),
реализуемых на операционных усилителях постоянного тока с большим коэффициентом
усиления.
0,2
21
1,0
0,8
0,6
0,4
76543
t, с
98
t
пп
69
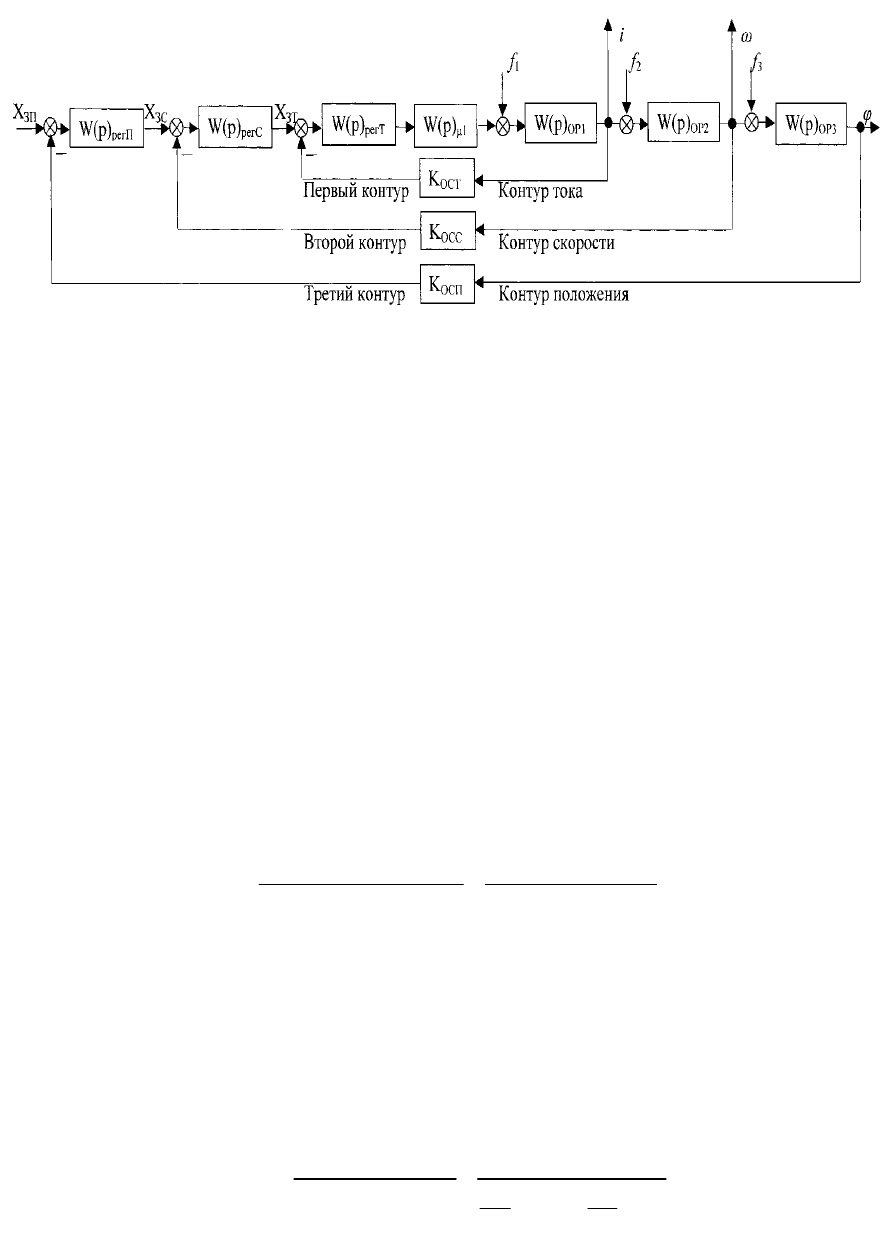
В состав каждого контура входит объект регулирования с передаточной функцией
W(p)
ор
, апериодическое звено с малой постоянной времени W(p)
и регулятор W(p)
рег
. В
результате образуется многоконтурная (2
х
или 3
х
-контурная) система подчиненного
регулирования, построенная по иерархическому принципу, как показано на рис.6.1.
6.2. Принципы оптимизации в системах подчиненного регулирования
При синтезе контуров регулирования используется два типа оптимальных настроек:
настройка на модульный оптимум (МО) и настройка на симметричный оптимум (СО). Выбор
типа настройки определяется требованиями к статическим и динамическим характеристикам
при отработке управляющих воздействий и возмущений, действующих внутри контура
регулирования.
Модульный оптимум настройки контуров регулирования
Считается, что замкнутый контур регулирования с единичной обратной связью настроен
на модульный оптимум, если он имеет передаточную функцию второго порядка вида
122
1
1
1
2222
pTpTpTapTa
pW
ММ
MO
, (6.1)
где
T
- малая постоянная времени некомпенсируемого апериодического звена;
а
М
=1ч4 – коэффициент модульной настройки;
а
М
=2 - стандартный коэффициент настройки контура.
Эту передаточную функцию можно записать в форме, соответствующей колебательному
звену
1
1
2
1
1
12
1
2
2
22
pp
pTpT
pW
k
k
ee
MO
, (6.2)
Рис.6.1. Трехконтурная система с подчиненным регулированием
i,
,
- регулируемые координаты, f
1
, f
2
, f
3
- возмущения
70
где
Мe
aTT
- эквивалентная постоянная времени колебательного звена;
e
k
T
1
- частота недемпфируемых колебаний;
2
М
а
- коэффициент демпфирования колебаний.
Для стандартной настройки
2TT
e
,
2
2
.
Действительная частота колебаний звена второго порядка определяется соотношением
k
1
2
. (6.3)
Следовательно, с возрастанием коэффициента демпфирования действительная частота
колебаний в контуре регулирования уменьшается. При стандартной настройке на МО, когда
а
М
=2,
2
k
. (6.4)
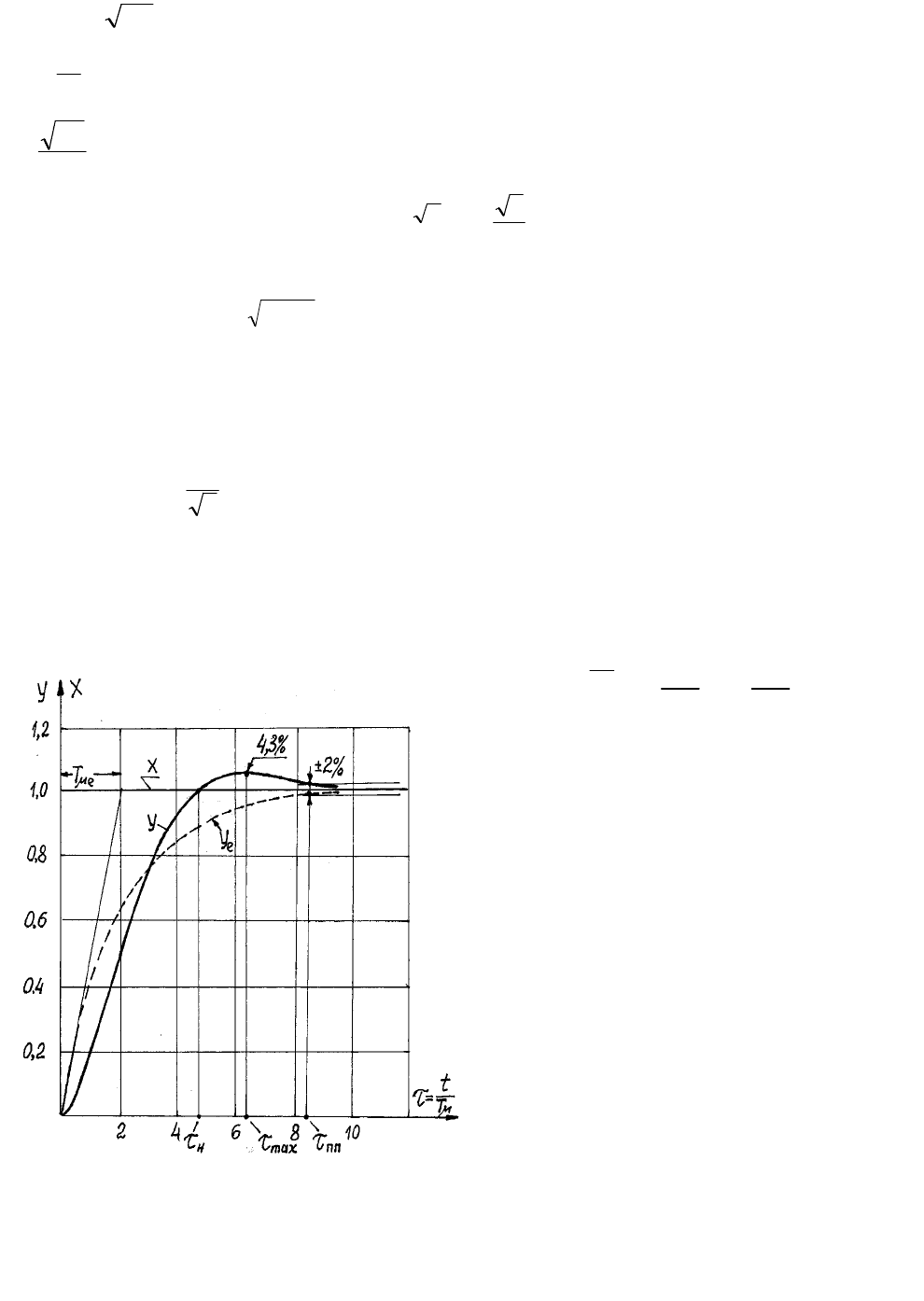
Переходный процесс отработки ступенчатого задающего воздействия представлен на
рис.6.2. Он описывается уравнением
T
t
T
t
ety
T
t
2
sin
2
cos1
2
. (6.5)
И имеет следующие показатели качества: время переходного процесса
t T
nn
8 4.
;
время нарастания
t T
H
4 7.
; время первого максимума
Tt
макс
3.6
; перерегулирование
4 3.
%; число колебаний
n
k
1
.
Рис.6.2. Переходные функции контура
регулирования, настроенного на модульный
оптимум
1 – передаточной функции 2-го порядка, а
м
=2
2 – эквивалентная по времени τ экспонента
71
Следовательно, в контуре, настроенном на МО, достигается компромисс между
быстродействием и перерегулированием, когда при сравнительно хорошем быстродействии
(
Tt
ПП
4.8
) перерегулирование
составляет
менее 5% (
4 3.
%). По динамическим
показателям этот переходный процесс можно считать приемлемым для многих
технологических установок. Разомкнутый контур, настроенный на МО, имеет передаточную
функцию
1
1
pTpTa
pW
М
р
МО
. (6.6)
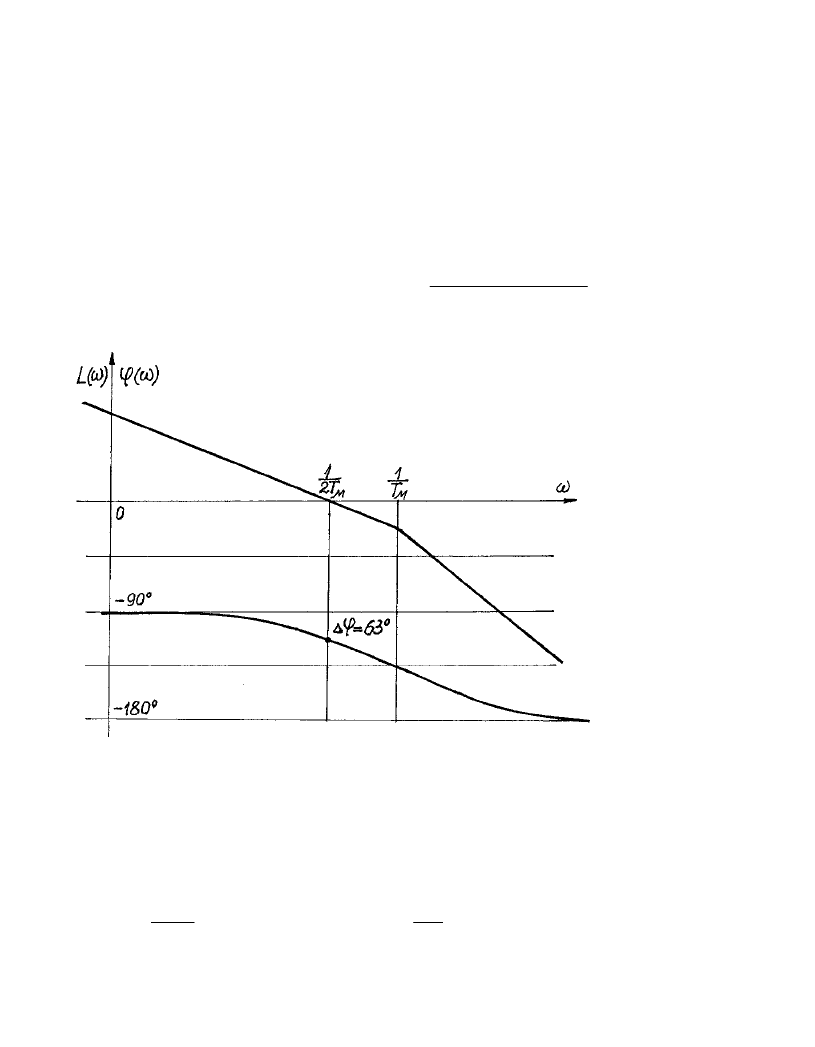
Так как эта передаточная функция содержит одно интегрирующее звено, то контур,
настроенный на МО, является однократно интегрирующей системой. В соответствии с (6.6)
ЛАЧХ и ЛФЧХ разомкнутого контура, настроенного на МО, приведены на рис.6.3, где
cp
T
1
2
частота среза,
c
T
1
- частота сопряже-
ния асимптот, а запас по фазе на частоте
среза
63180
срср
.
Таким образом, задачей синтеза контура при настройке на МО является выбор
регулятора - последовательного корректирующего звена с такой передаточной функцией,
чтобы разомкнутый контур имел передаточную функцию (6.6).
Симметричный оптимум настройки контуров регулирования
Считается, что замкнутый контур регулирования с единичной отрицательной обратной
связью настроен на симметричный оптимум (СО), если он имеет передаточную функцию
третьего порядка вида
Рис.6.3. ЛАЧХ и ЛФЧХ разомкнутого контура
регулирования, настроенного на модульный оптимум
72
W p
T p
a T p a T p T p
T p
T p T p T p
CO
c c
4 1
4 1
4 1
8 8 4 1
3 3 2 2 3 3 2 2
, (6.7)
где
T
- малая постоянная времени некомпенсируемого апериодического звена;
а
с
=3,5
8 – коэффициент симметричной настройки;
a
с
8
- стандартный коэффициент настройки контура.
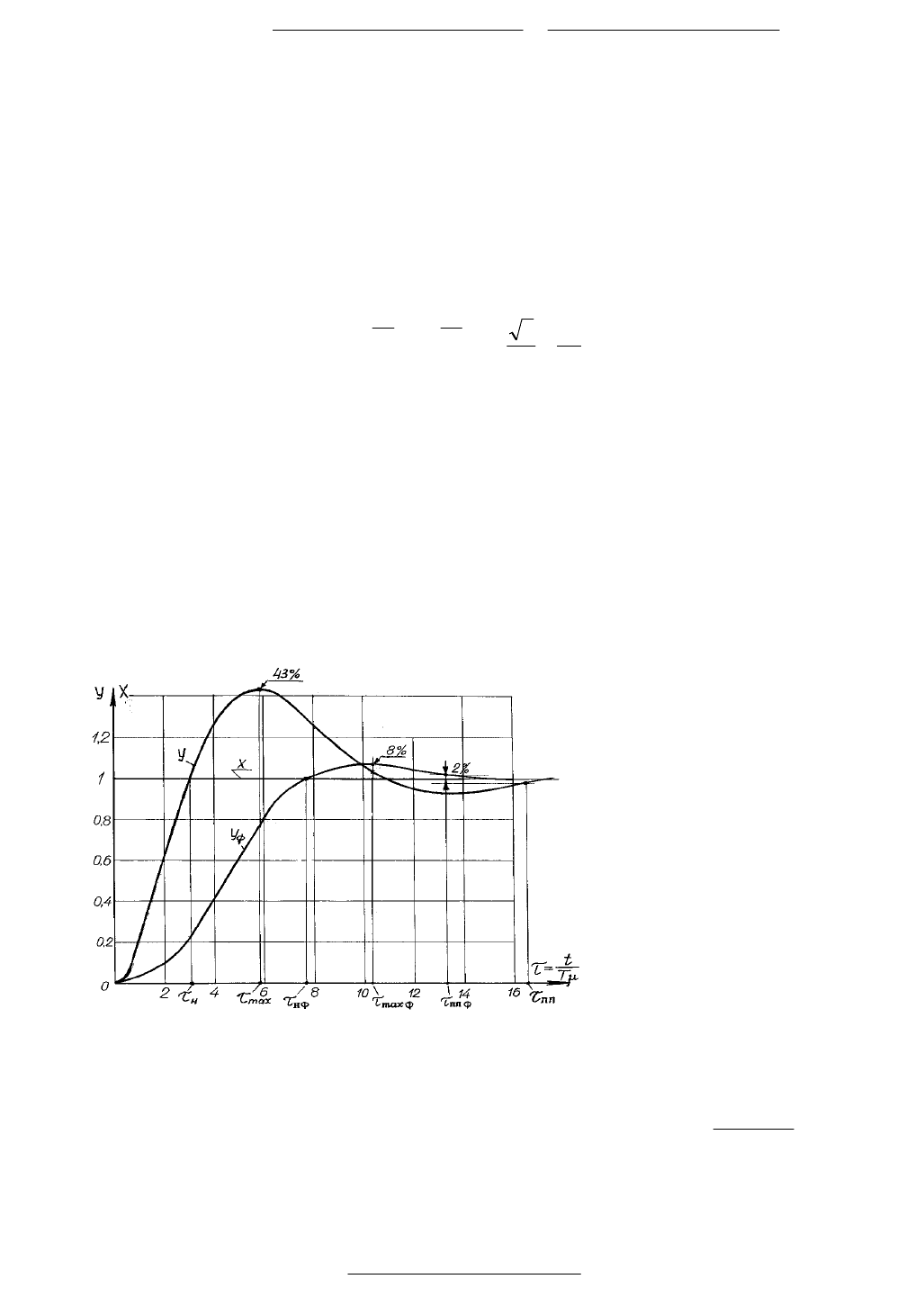
Для контура, имеющего стандартную настройку на СО (а
с
=8), переходный процесс
отработки ступенчатого задающего воздействия представлен на рис.6.4. Он описывается
уравнением
y t e e
t
T
t
T
t
T
1 2
3
4
2 4
cos
(6.8)
и имеет следующие показатели качества: время переходного процесса
t T
nn
16 5.
; время
нарастания
t T
H
31.
; время первого максимума
Tt
макс
8.5
; время первого минимума
Tt
мин
75.12
; перерегулирование
43
%; число колебаний
n
k
2
.
Из анализа показателей качества следует, что они в значительной степени отличаются от
показателей контура, настроенного на МО.
Большое перерегулирование, равное
=43%, обусловлено влиянием форсирующего звена
W(p)=4Tp+1 в числителе передаточной
функции (6.7). Перегулирование можно
значительно уменьшить, если
скомпенсировать числитель
передаточной функции, установив на
входе управления контура
апериодическое звено (фильтр) с
постоянной времени
T T
4
14
1
)(
pT
pW
™
. (6.9)
Тогда передаточная функция по задающему воздействию при стандартной настройке
запишется в следующем виде
1488
1
2233
pTpTpT
pW
фCO
. (6.10)
Рис.6.4. Переходная функция контура регулирования,
настроенного на симметричный оптимум
У – без фильтра на входе,
У
Ф
– с фильтром на входе
73

Для контура, настроенного на СО с фильтром на входе, переходный процесс отработки
ступенчатого задающего воздействия представлен на рис.6.4. Он описывается уравнением
y t e e
t
T
t
T
t
T
1
1
3
3
4 4
2 4
sin
(6.11)
и имеет следующие показатели качества: время переходного процесса
Tt
ПП
3.13
; время
нарастания
t T
H
7 6.
; время первого максимума
Tt
макс
2.10
; перерегулирование
8
%;
число колебаний
n
k
1
.
Следовательно, за счет компенсирующего действия фильтра на входе управления
контура достигнуто значительное улучшение динамических показателей.
Разомкнутый контур, настроенный на
СО, имеет передаточную функцию
W p
T p
a T p T p
p
CO
c
4 1
1
2 2
. (6.12)
Контур, настроенный на СО, содержит в прямой цепи регулирования два
интегрирующих звена и поэтому является двукратноинтегрирующей системой. В соответствии
с (6.12) на рис.6.5 приведены ЛАЧХ и ЛФЧХ разомкнутого контура, настроенного на СО, где
cp
T
1
2
частота среза,
T
c
4
1
1
- первая частота сопряжения асимптот,
T
c
1
2
- вторая
частота
сопряжения. Запас по фазе на частоте среза
=38. ЛАЧХ имеет симметричную форму относительно частоты среза с наклонами асимптот
-40дб/дек, -20дб/дек, -40дб/дек. Поэтому такой настройке присвоено название симметричный
Рис.6.5. ЛАЧХ и ЛФЧХ разомкнутого контура
регулирования, настроенного на симметричный
оптимум
1 – стандартная настройка (а
С
=8)
2 – настройка на "минимальную колебательность" (а
С
=6,4)
74