Harris C.M., Piersol A.G. Harris Shock and vibration handbook
Подождите немного. Документ загружается.

THEORY OF VIBRATION ISOLATION 30.9
* This equation is based upon energy considerations and is approximate. Actually, the friction damper
breaks loose when the inertia force of the mass equals the friction force, mu
0
ω
2
= F
f
.This gives the exact solu-
tion (ω/ω
0
)
L
=
η
. A numerical factor of 4/π relates the Coulomb damping parameters in the exact and
approximate solutions for the system.
i.e., permits relative motion across the isolator, can be obtained from the relative dis-
placement transmissibility expression, (e) in Table 30.2. The relative displacement is
imaginary when ω
2
/ω
0
2
≤ (4/π)η. Thus, the “break-loose” frequency ratio is*
L
=
η (30.7)
The displacement transmissibility can become infinite at resonance, even though
the system is damped, if the Coulomb damping force is less than a critical minimum
value. The denominator of the absolute and relative transmissibility expressions
becomes zero for a frequency ratio ω/ω
0
of unity. If the break-loose frequency is
lower than the undamped natural frequency, the amplification of vibration becomes
infinite at resonance.This occurs because the energy dissipated by the friction damp-
ing force increases linearly with the displacement amplitude, and the energy intro-
duced into the system by the excitation source also increases linearly with the
displacement amplitude.Thus, the energy dissipated at resonance is either greater or
less than the input energy for all amplitudes of vibration. The minimum dry-friction
force which prevents vibration of infinite magnitude at resonance is
(F
f
)
min
==0.79 ku
0
(30.8)
where k and u
0
are defined in Table 30.1.
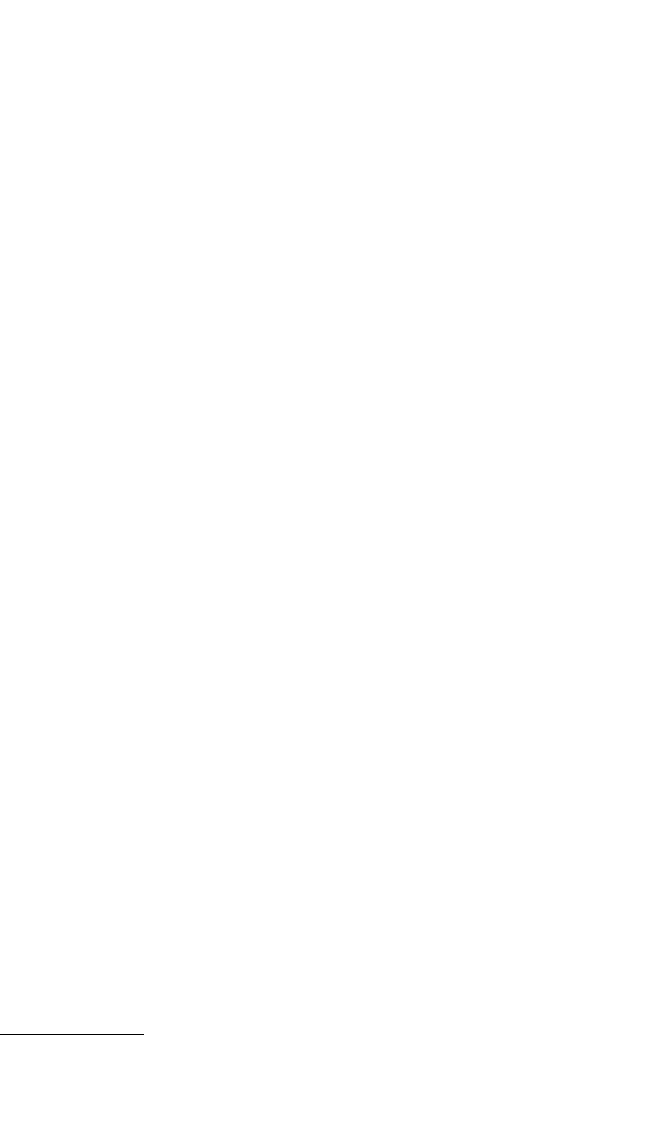
As shown in Fig. 30.5, an increase in η decreases the absolute displacement trans-
missibility at resonance and increases the resonance frequency.All curves intersect at
the point (T
A
)
D
= 1, ω/ω
0
=
2
.With optimum damping force, there is no motion across
the damper for ω/ω
0
≤
2
; for higher frequencies the displacement transmissibility is
less than unity. The friction force that produces this “resonance-free” condition is
(F
f
)
op
==1.57 ku
0
(30.9)
For high forcing frequencies, the absolute displacement transmissibility varies
inversely as the square of the forcing frequency, even though the friction damper dis-
sipates energy. For relatively high damping (η>2), the absolute displacement trans-
missibility, for frequencies greater than the break-loose frequency, is approximately
4ηω
0
2
/πω
2
.
Acceleration Transmissibility. The absolute displacement transmissibility (T
A
)
D
shown in Fig. 30.5 is the ratio of response of the isolator to the excitation, where each is
expressed as a displacement amplitude in simple harmonic motion. The damping
parameter η is defined with reference to the displacement amplitude u
0
of the excita-
tion. Inasmuch as all motion is simple harmonic, the transmissibility (T
A
)
D
also applies
to acceleration transmissibility when the damping parameter is defined properly.When
the excitation is defined in terms of the acceleration amplitude ü
0
of the excitation,
η
¨u
0
= (30.10)
F
f
ω
2
kü
0
πku
0
2
πku
0
4
4
π
ω
ω
0
8434_Harris_30_b.qxd 09/20/2001 11:41 AM Page 30.9

where ω= forcing frequency, rad/sec
ü
0
= acceleration amplitude of excitation, in./sec
2
k = isolator stiffness, lb/in.
F
f
= Coulomb friction force, lb
For relatively high forcing frequencies, the acceleration transmissibility approaches
a constant value (4/π)ξ, where ξ is the Coulomb damping parameter for acceleration
excitation defined in Table 30.1. The acceleration transmissibility of a rigidly con-
nected Coulomb damper system becomes asymptotic to a constant value because the
Coulomb damper transmits the same friction force regardless of the amplitude of the
vibration.
ELASTICALLY CONNECTED VISCOUS DAMPER
The general characteristics of the elastically connected viscous damper shown at C
in Table 30.1 may best be understood by successively assigning values to the viscous
damper coefficient c while keeping the stiffness ratio N constant. For zero damping,
the mass is supported by the isolator of stiffness k. The transmissibility curve has the
characteristics typical of a transmissibility curve for an undamped system having the
natural frequency
ω
0
=
(30.11)
When c is infinitely great, the transmissibility curve is that of an undamped system
having the natural frequency
ω
∞
=
= N
+
1
ω
0
(30.12)
where k
1
= Nk. For intermediate values of damping, the transmissibility falls within the
limits established for zero and infinitely great damping. The value of damping which
produces the minimum transmissibility at resonance is called optimum damping.
All curves approach the transmissibility curve for infinite damping as the forcing
frequency increases. Thus, the absolute transmissibility at high forcing frequencies is
inversely proportional to the square of the forcing frequency. General expressions
for absolute and relative transmissibility are given in Table 30.2.
A comparison of absolute transmissibility curves for the elastically connected
viscous damper and the rigidly connected viscous damper is shown in Fig. 30.7. A
constant viscous damping coefficient of 0.2c
c
is maintained, while the value of the
stiffness ratio N is varied from zero to infinity.The transmissibilities at resonance are
comparable, even for relatively small values of N, but a substantial gain is achieved
in the isolation characteristics at high forcing frequencies by elastically connecting
the damper.
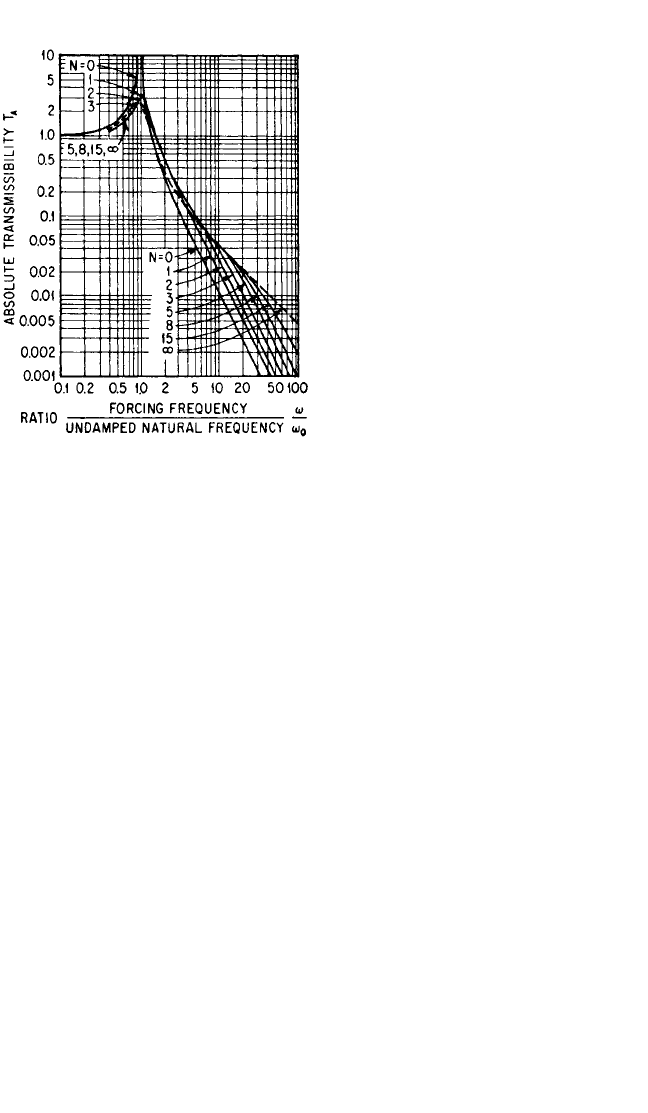
Transmissibility at Resonance. The maximum transmissibility (at resonance) is
a function of the damping ratio ζ and the stiffness ratio N, as shown in Fig. 30.8. The
maximum transmissibility is nearly independent of N for small values of ζ. However,
for ζ>0.1, the coefficient N is significant in determining the maximum transmissi-
bility.The lowest value of the maximum absolute transmissibility curves corresponds
to the conditions of optimum damping.
k + k
1
m
k
m
30.10 CHAPTER THIRTY
8434_Harris_30_b.qxd 09/20/2001 11:41 AM Page 30.10
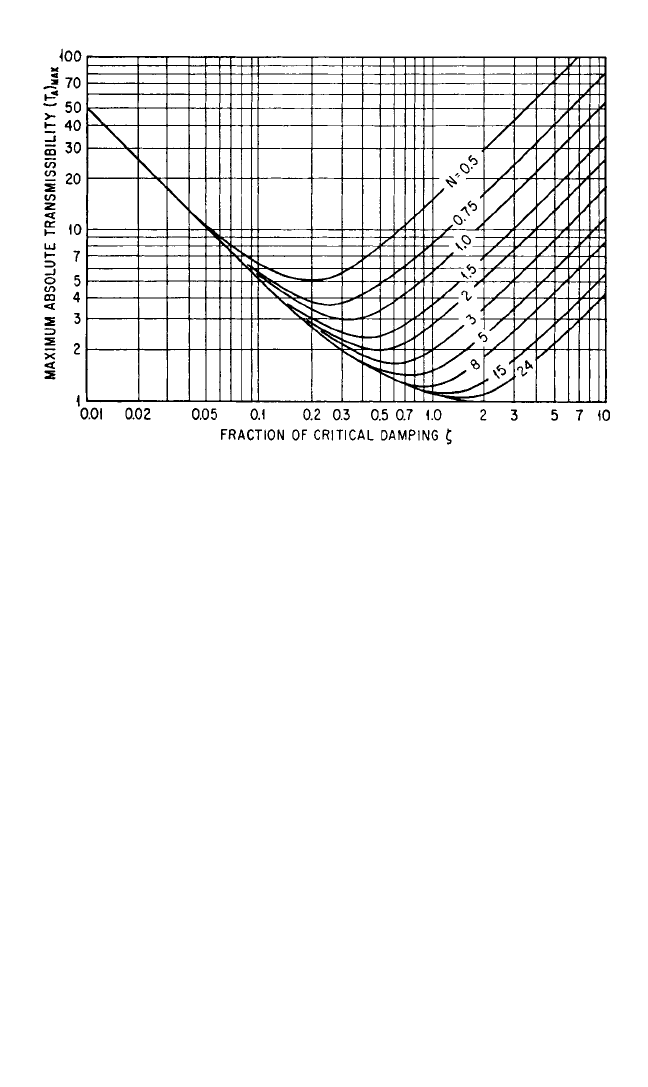
Motion Response. A typical motion
response curve is shown in Fig. 30.9 for
the stiffness ratio N = 3. For small damp-
ing, the response is similar to the
response of an isolation system with
rigidly connected viscous damper. For
intermediate values of damping, the
curves tend to be flat over a wide fre-
quency range before rapidly decreasing
in value at the higher frequencies. For
large damping, the resonance occurs near
the natural frequency of the system with
infinitely great damping. All response
curves approach a high-frequency
asymptote for which the attenuation
varies inversely as the square of the exci-
tation frequency.
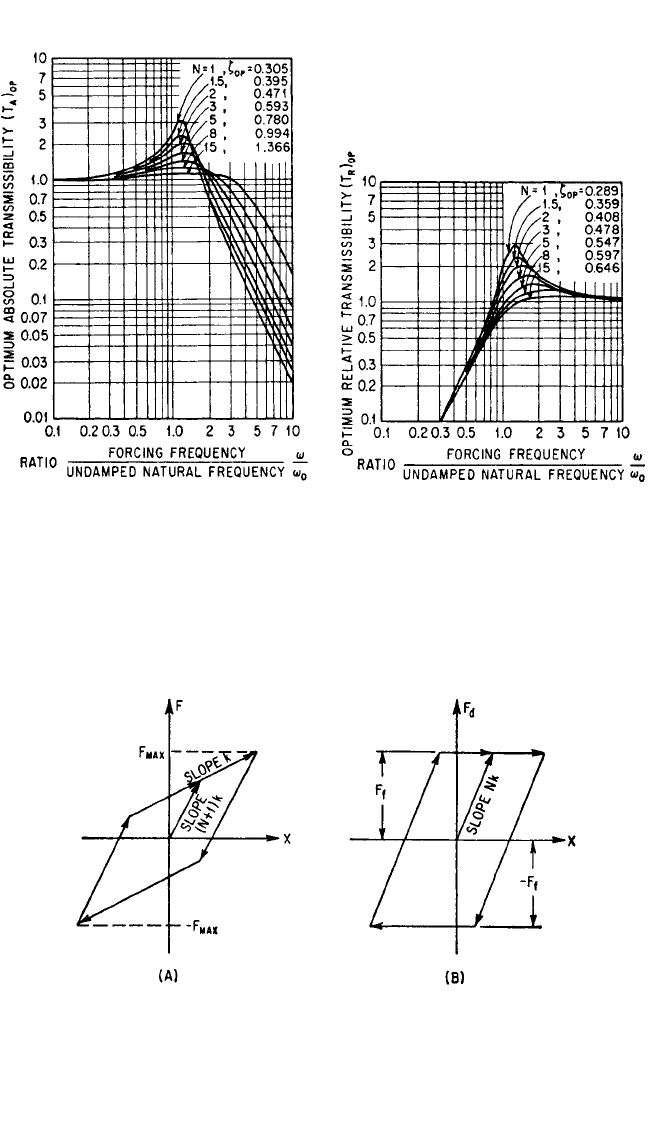
Optimum Transmissibility. For a sys-
tem with optimum damping, maximum
transmissibility coincides with the inter-
sections of the transmissibility curves for
zero and infinite damping.The frequency
ratios (ω/ω
0
)
op
at which this occurs are
different for absolute and relative trans-
missibility:
Absolute transmissibility:
op
(A)
=
(30.13)
Relative transmissibility:
op
(R)
=
The optimum transmissibility at resonance, for both absolute and relative motion, is
T
op
= 1 + (30.14)
The optimum transmissibility as determined from Eq. (30.14) corresponds to the
minimum points of the curves of Fig. 30.8.
The damping which produces the optimum transmissibility is obtained by differ-
entiating the general expressions for transmissibility [(g) and (h) in Table 30.2] with
respect to the frequency ratio, setting the result equal to zero, and combining it with
Eq. (30.13):
Absolute transmissibility:
(ζ
op
)
A
= 2
(N
+
2
)
(30.15a)
N
4(N + 1)
2
N
N + 2
2
ω
ω
0
2(N + 1)
N + 2
ω
ω
0
THEORY OF VIBRATION ISOLATION 30.11
FIGURE 30.7 Comparison of absolute trans-
missibility for rigidly and elastically connected,
viscous damped isolation systems shown at A
and C, respectively, in Table 30.1, as a function of
the frequency ratio ω/ω
0
.The solid curves refer to
the elastically connected damper, and the param-
eter N is the ratio of the damper spring stiffness
to the stiffness of the principal support spring.
The fraction of critical damping ζ=c/c
c
is 0.2 in
both systems. The transmissibility at high fre-
quencies decreases at a rate of 6 dB per octave
for the rigidly connected damper and 12 dB per
octave for the elastically connected damper.
8434_Harris_30_b.qxd 09/20/2001 11:41 AM Page 30.11
Relative transmissibility:
(ζ
op
)
R
= (30.15b)
Values of optimum damping determined from the first of these relations correspond
to the minimum points of the curves of Fig. 30.8. By substituting the optimum damp-
ing ratios from Eqs. (30.15) into the general expressions for transmissibility given in
Table 30.2, the optimum absolute and relative transmissibility equations are
obtained, as shown graphically by Figs. 30.10 and 30.11, respectively. For low values
of the stiffness ratio N, the transmissibility at resonance is large but excellent isola-
tion is obtained at high frequencies. Conversely, for high values of N, the transmissi-
bility at resonance is lowered, but the isolation efficiency also is decreased.
ELASTICALLY CONNECTED COULOMB DAMPER
Force-deflection curves for the isolators incorporating elastically connected
Coulomb dampers, as shown at D in Table 30.1, are illustrated in Fig. 30.12. Upon
application of the load, the isolator deflects; but since insufficient force has been
developed in the spring k
1
, the damper does not slide, and the motion of the mass is
opposed by a spring of stiffness (N + 1)k. The load is now increased until a force is
developed in spring k
1
which equals the constant friction force F
f
; then the damper
begins to slide. When the load is increased further, the damper slides and reduces the
effective spring stiffness to k. If the applied load is reduced after reaching its maxi-
N
2
(N
+
1
)(
N
+
2
)
30.12 CHAPTER THIRTY
FIGURE 30.8 Maximum absolute transmissibility for the elastically connected, vis-
cous-damped isolation system shown at C in Table 30.1 as a function of the fraction of
critical damping ζ and the stiffness of the connecting spring.The parameter N is the ratio
of the damper spring stiffness to the stiffness of the principal support spring.
8434_Harris_30_b.qxd 09/20/2001 11:41 AM Page 30.12
mum value, the damper no longer dis-
places because the force developed in
the spring k
1
is diminished. Upon com-
pletion of the load cycle, the damper will
have been in motion for part of the cycle
and at rest for the remaining part to form
the hysteresis loops shown in Fig. 30.12.
Because of the complexity of the
applicable equations, the equivalent
energy method is used to obtain the
transmissibility and motion response
functions. Applying frequency, damping,
and transmissibility expressions for the
elastically connected viscous damped
system to the elastically connected
Coulomb-damped system, the transmis-
sibility expressions tabulated in Table
30.2 for the latter are obtained.
If the coefficient of the damping term
in each of the transmissibility expres-
sions vanishes, the transmissibility is
independent of damping. By solving for
the frequency ratio ω/ω
0
in the coeffi-
cients that are thus set equal to zero, the
frequency ratios obtained define the fre-
quencies of optimum transmissibility.
These frequency ratios are given by Eqs.
(30.13) for the elastically connected vis-
cous damped system and apply equally
well to the elastically connected
Coulomb damped system because the
method of equivalent viscous damping
is employed in the analysis. Similarly,
Eq. (30.14) applies for optimum transmissibility at resonance.
The general characteristics of the system with an elastically connected Coulomb
damper may be demonstrated by successively assigning values to the damping force
while keeping the stiffness ratio N constant. For zero and infinite damping, the trans-
missibility curves are those for undamped systems and bound all solutions. Every
transmissibility curve for 0 < F
f
<∞passes through the intersection of the two
bounding transmissibility curves. For low damping (less than optimum), the damper
“breaks loose” at a relatively low frequency, thereby allowing the transmissibility to
increase to a maximum value and then pass through the intersection point of the
bounding transmissibility curves. For optimum damping, the maximum absolute
transmissibility has a value given by Eq. (30.14); it occurs at the frequency ratio
(ω/ω
0
)
op
(A)
defined by Eq. (30.13). For high damping, the damper remains “locked-
in” over a wide frequency range because insufficient force is developed in the spring
k
1
to induce slip in the damper. For frequencies greater than the break-loose fre-
quency, there is sufficient force in spring k
1
to cause relative motion of the damper.
For a further increase in frequency, the damper remains broken loose and the trans-
missibility is limited to a finite value. When there is insufficient force in spring k
1
to
maintain motion across the damper, the damper locks-in and the transmissibility is
that of a system with the infinite damping.
THEORY OF VIBRATION ISOLATION 30.13
FIGURE 30.9 Motion response for the elasti-
cally connected, viscous-damped isolation sys-
tem shown at C in Table 30.1 as a function of the
frequency ratio ω/ω
0
and the fraction of critical
damping ζ. For this example, the stiffness of the
damper connecting spring is 3 times as great as
the stiffness of the principal support spring
(N = 3). The curves give the resulting motion of
the equipment in terms of the excitation force F
and the static stiffness of the isolator k.
8434_Harris_30_b.qxd 09/20/2001 11:41 AM Page 30.13
30.14 CHAPTER THIRTY
FIGURE 30.10 Absolute transmissibility with
optimum damping in elastically connected, vis-
cous-damped isolation system shown at C in
Table 30.1 as a function of the frequency ratio
ω/ω
0
and the fraction of critical damping ζ.These
curves apply to elastically connected, viscous-
damped systems having optimum damping for
absolute motion. The transmissibility (T
A
)
op
is
(x
0
/u
0
)
op
for the motion-excited system and
(F
T
/F
0
)
op
for the force-excited system.
FIGURE 30.11 Relative transmissibility with
optimum damping in the elastically connected,
viscous-damped isolation system shown at C in
Table 30.1 as a function of the frequency ratio
ω/ω
0
and the fraction of critical damping ζ.These
curves apply to elastically connected, viscous-
damped systems having optimum damping for
relative motion. The relative transmissibility
(T
R
)
op
is (δ
0
/u
0
)
op
for the motion-excited system.
FIGURE 30.12 Force-deflection characteristics of the elastically connected,
Coulomb-damped isolation system shown at D in Table 30.1. The force-
deflection diagram for a cyclic deflection of the complete isolator is shown at A
and the corresponding diagram for the assembly of Coulomb damper and spring
k
1
= Nk is shown at B.
8434_Harris_30_b.qxd 09/20/2001 11:41 AM Page 30.14
The break-loose and lock-in frequencies are determined by requiring the motion
across the Coulomb damper to be zero. Then the break-loose and lock-in frequency
ratios are
L
=
η
(N + 1)
(30.16)
η
± N
where η is the damping parameter defined in Table 30.1 with reference to the dis-
placement amplitude u
0
. The plus sign corresponds to the break-loose frequency,
while the minus sign corresponds to the lock-in frequency. Damping parameters for
which the denominator of Eq. (30.16) becomes negative correspond to those condi-
tions for which the damper never becomes locked-in again after it has broken loose.
Thus, the damper eventually becomes locked-in only if η>(π/4)N.
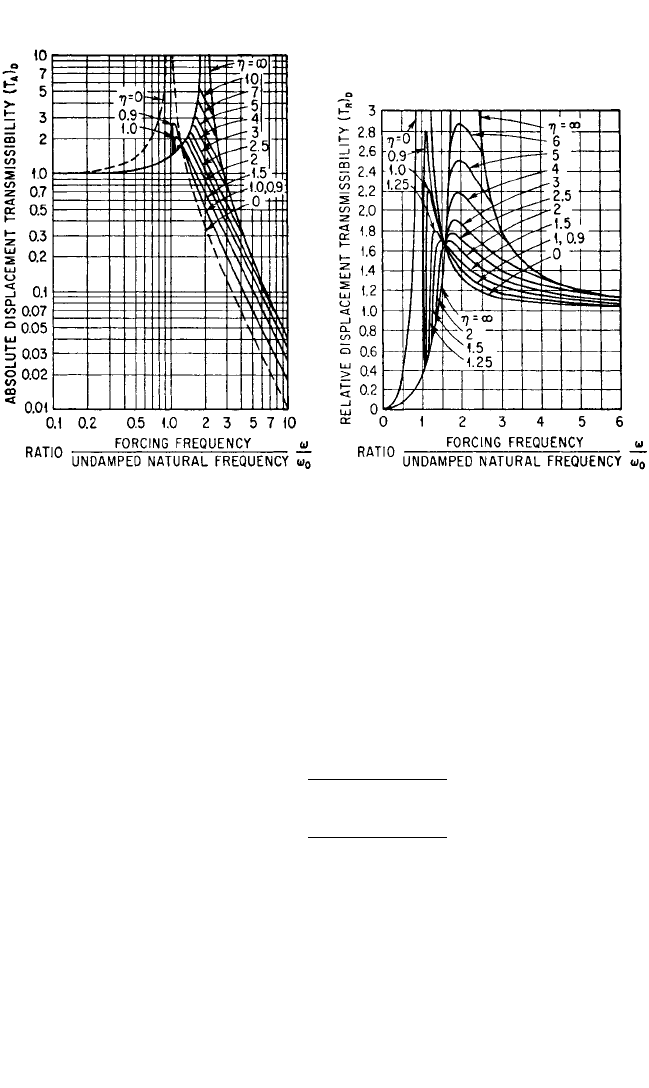
Displacement Transmissibility. The absolute displacement transmissibility
curve for the stiffness ratio N = 3 is shown in Fig. 30.13 where (T
A
)
D
= x
0
/u
0
. A small
decrease in damping force F
f
below the optimum value causes a large increase in the
transmitted vibration near resonance. However, a small increase in damping force F
f
above optimum causes only small changes in the maximum transmissibility. Thus, it
is good design practice to have the damping parameter η equal to or greater than the
optimum damping parameter η
op
.
The relative transmissibility for N = 3 is shown in Fig. 30.14 where (T
R
)
D
=δ
0
/u
0
.
All curves pass through the intersection of the curves for zero and infinite damping.
For optimum damping, the maximum relative transmissibility has a value given by
Eq. (30.14); it occurs at the frequency ratio
op
(R)
defined by Eq. (30.13).
Acceleration Transmissibility. The acceleration transmissibility can be ob-
tained from the expression for displacement transmissibility by substitution of the
effective displacement damping parameter in the expression for transmissibility of
a system whose excitation is constant acceleration amplitude. If ü
0
represents the
acceleration amplitude of the excitation, the corresponding displacement ampli-
tude is u
0
=−ü
0
/ω
2
. Using the definition of the acceleration Coulomb damping
parameter ξ given in Table 30.1, the equivalent displacement Coulomb damping
parameter is
η
eq
=−
2
ξ (30.17)
Substituting this relation in the absolute transmissibility expression given at j in
Table 30.2, the following equation is obtained for the acceleration transmissibility:
(T
A
)
A
==
1 +
ξ
2
− 2
(30.18)
1 −
2
ω
2
ω
0
2
N + 1
N
ω
2
ω
0
2
N + 2
N
ω
2
ω
0
2
4
π
¨x
0
ü
0
ω
ω
0
ω
ω
0
4
π
4
π
ω
ω
0
THEORY OF VIBRATION ISOLATION 30.15
8434_Harris_30_b.qxd 09/20/2001 11:41 AM Page 30.15
Equation (30.18) is valid only for the frequency range in which there is relative
motion across the Coulomb damper. This range is defined by the break-loose and
lock-in frequencies which are obtained by substituting Eq. (30.17) into Eq. (30.16):
L
=
ξ
(N + 1) ± N
(30.19)
ξ
where Eqs. (30.16) and (30.19) give similar results, damping being defined in terms of
displacement and acceleration excitation, respectively. For frequencies not included in
the range between break-loose and lock-in frequencies, the acceleration transmissibil-
ity is that for an undamped system. Equation (30.18) indicates that infinite accelera-
tion occurs at resonance unless the damper remains locked-in beyond a frequency
ratio of unity.The coefficient of the damping term in Eq. (30.18) is identical to the cor-
responding coefficient in the expression for (T
A
)
D
at j in Table 30.2.Thus, the frequency
ratio at the optimum transmissibility is the same as that for displacement excitation.
4
π
4
π
ω
ω
0
30.16 CHAPTER THIRTY
FIGURE 30.13 Absolute displacement trans-
missibility for the elastically connected,
Coulomb-damped isolation system illustrated at
D in Table 30.1, for the damper spring stiffness
defined by N = 3. The curves give the ratio of the
absolute displacement amplitude of the equip-
ment to the displacement amplitude imposed at
the foundation, as a function of the frequency
ratio ω/ω
0
and the displacement Coulomb-
damping parameter η.
FIGURE 30.14 Relative displacement trans-
missibility for the elastically connected,
Coulomb-damped isolation system illustrated at
D in Table 30.1, for the damper spring stiffness
defined by N = 3. The curves give the ratio of the
relative displacement amplitude (maximum iso-
lator deflection) to the displacement amplitude
imposed at the foundation, as a function of the
frequency ratio ω/ω
0
and the displacement
Coulomb-damping parameter η.
8434_Harris_30_b.qxd 09/20/2001 11:41 AM Page 30.16
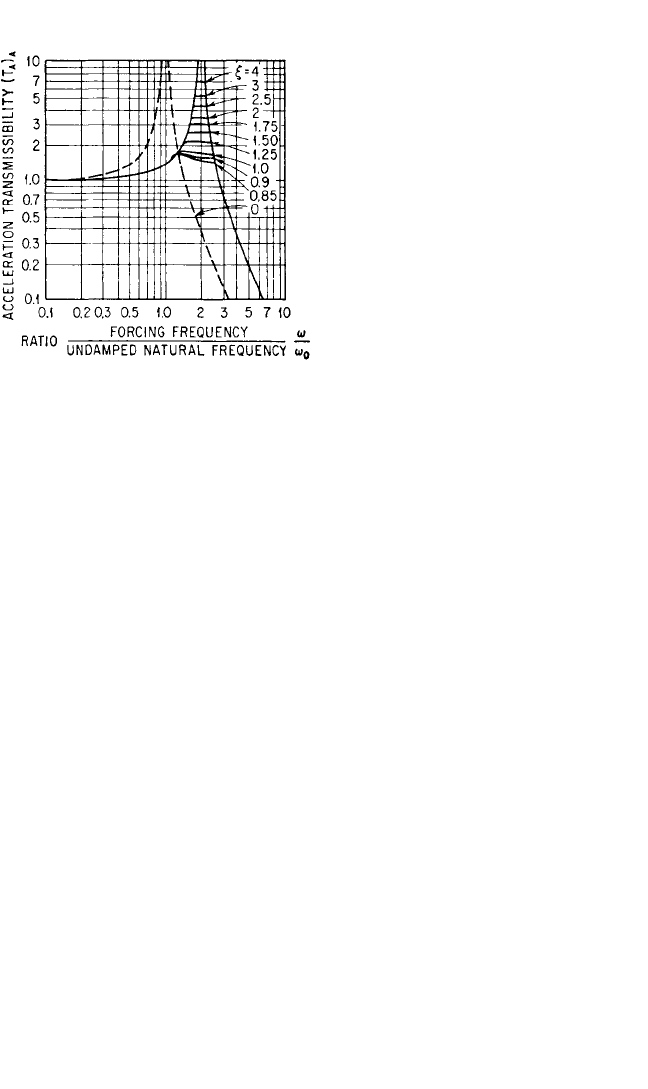
An acceleration transmissibility
curve for N = 3 is shown by Fig. 30.15.
Relative motion at the damper occurs in
a limited frequency range; thus, for rela-
tively high frequencies, the acceleration
transmissibility is similar to that for infi-
nite damping.
Optimum Damping Parameters.
The optimum Coulomb damping param-
eters are obtained by equating the opti-
mum viscous damping ratio given by Eq.
(30.15) to the equivalent viscous damp-
ing ratio for the elastically supported
damper system and replacing the fre-
quency ratio by the frequency ratio given
by Eq. (30.13).The optimum value of the
damping parameter η in Table 30.1 is
η
op
=
(30.20)
To obtain the optimum value of the
damping parameter ξ in Table 30.1, Eq.
(30.17) is substituted in Eq. (30.20):
ξ
op
=
(30.21)
Force Transmissibility. The force transmissibility (T
A
)
F
= F
T
/F
0
is identical to
(T
A
)
A
given by Eq. (30.18) if ξ=ξ
F
, where ξ
F
is defined as
ξ
F
= (30.22)
Thus, the transmissibility curve shown in Fig. 30.15 also gives the force transmissibil-
ity for N = 3. By substituting Eq. (30.22) into Eq. (30.21), the transmitted force is
optimized when the friction force F
f
has the following value:
(F
f
)
op
=
(30.23)
To avoid infinite transmitted force at resonance, it is necessary that F
f
> (π/4)F
0
.
Comparison of Rigidly Connected and Elastically Connected Coulomb-
Damped Systems. A principal limitation of the rigidly connected Coulomb-
damped isolator is the nature of the transmissibility at high forcing frequencies.
Because the isolator deflection is small, the force transmitted by the spring is negli-
gible; then the force transmitted by the damper controls the motion experienced by
N + 2
N + 1
πF
0
4
F
f
F
0
N + 2
N + 1
π
4
N + 1
N + 2
π
2
THEORY OF VIBRATION ISOLATION 30.17
FIGURE 30.15 Acceleration transmissibility
for the elastically connected, Coulomb-damped
isolation system illustrated at D in Table 30.1, for
the damper spring stiffness defined by N = 3.The
curves give the ratio of the acceleration ampli-
tude of the equipment to the acceleration ampli-
tude imposed at the foundation, as a function of
the frequency ratio ω/ω
0
and the acceleration
Coulomb-damping parameter ξ.
8434_Harris_30_b.qxd 09/20/2001 11:41 AM Page 30.17
the equipment. The acceleration transmissibility approaches the constant value
(4/π)ξ, independent of frequency. The corresponding transmissibility for an isolator
with an elastically connected Coulomb damper is (N + 1)/(ω/ω
0
)
2
. Thus, the trans-
missibility varies inversely as the square of the excitation frequency and reaches a
relatively low value at large values of excitation frequency.
MULTIPLE DEGREE-OF-FREEDOM SYSTEMS
The single degree-of-freedom systems discussed previously are adequate for illus-
trating the fundamental principles of vibration isolation but are an oversimplification
insofar as many practical applications are concerned. The condition of unidirectional
motion of an elastically mounted mass is not consistent with the requirements in
many applications. In general, it is necessary to consider freedom of movement in all
directions, as dictated by existing forces and motions and by the elastic constraints.
Thus, in the general isolation problem, the equipment is considered as a rigid body
supported by resilient supporting elements or isolators. This system is arranged so
that the isolators effect the desired reduction in vibration.Various types of symmetry
are encountered, depending upon the equipment and arrangement of isolators.
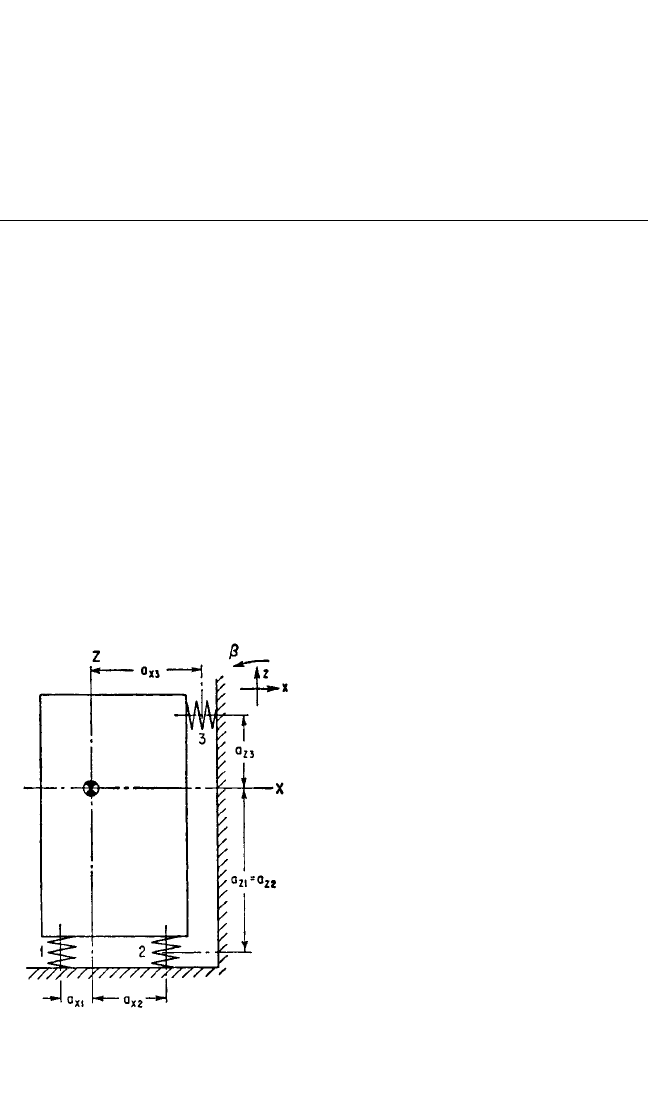
NATURAL FREQUENCIES—ONE PLANE OF SYMMETRY
A rigid body supported by resilient supports with one vertical plane of symmetry has
three coupled natural modes of vibration and a natural frequency in each of these
modes.A typical system of this type is illustrated in Fig. 30.16; it is assumed to be sym-
metrical with respect to a plane parallel with the plane of the paper and extending
through the center-of-gravity of the sup-
ported body. Motion of the supported
body in horizontal and vertical transla-
tional modes and in the rotational mode,
all in the plane of the paper, are coupled.
The equations of motion of a rigid body
on resilient supports with six degrees-of-
freedom are given by Eq. (3.31). By
introducing certain types of symmetry
and setting the excitation equal to zero, a
cubic equation defining the free vibra-
tion of the system shown in Fig. 30.16 is
derived, as given by Eqs. (3.36). This
equation may be solved graphically for
the natural frequencies of the system by
use of Fig. 3.14.
SYSTEM WITH TWO PLANES
OF SYMMETRY
A common arrangement of isolators is
illustrated in Fig. 30.17; it consists of an
equipment supported by four isolators
located adjacent to the four lower cor-
30.18 CHAPTER THIRTY
FIGURE 30.16 Schematic diagram of a rigid
equipment supported by an arbitrary arrange-
ment of vibration isolators, symmetrical with
respect to a plane through the center-of-gravity
parallel with the paper.
8434_Harris_30_b.qxd 09/20/2001 11:41 AM Page 30.18