Kortum P. (ed.) HCI Beyond the GUI. Design for Haptic, Speech, Olfactory, and Other Nontraditional Interfaces
Подождите немного. Документ загружается.

9.1.2 Why Is a Taste Interface Difficult?
Taste is the last frontier of virtual reality. Taste is very difficult to display because
it is a multimodal sensation comprising chemical substance, sound, smell, and
haptic sensations. The literature on visual and auditory displays is extensive.
Smell display is not common, but smell can easily be displayed using a vaporizer.
Although not as extensive as visual and auditory displays, the literature on olfac-
tory displays is growing (e.g., Nakamoto et al., 1994; Davide et al., 2001).
Taste perceived by the tongue can be measured using a biological membrane
sensor (Toko et al., 1994, 1998). The sensor measures the chemical substance of
the five basic tastes. Any arbitrary taste can easily be synthesized from the five
tastes based on sensor data.
Another important element in taste is food texture. Measurement of biting
force has been studied. A multipoint force sensor has been used to measure force
distribution on the teeth (Khoyama et al., 2001, 2002). The sensory properties of
the texture of real food have also been studied (Szczesniak, 1963, 2002).
Dental schools have been working on the training of patients to chew prop-
erly. A master–slave manipulator for mastication has been developed (Takanobu
et al., 2002). A robot manipulated by the doctor applies appropriate force to the
patient’s teeth.
Haptic interfaces for hands or fingers are the focus of major research efforts
in virtual reality. In contrast, research into haptic displays for biting is very rare.
9.2
TECHNOLOGY OF THE INTERFACE
There have been no interactive techniques developed to date that can display
taste. The Food Simulator Project was an effort to develop just such an interface.
9.2.1 Existing Techniques for Displaying Taste
The traditional method for displaying taste is the use of filter paper discs, such as for
patients with taste disorders (Tsuruoka, 2003). A small filter paper disc is soaked
with a chemical (taste) substance and put on the patient’s tongue. Filter paper
discs with various density of the chemical substance are used to test taste disorders.
However, there has been no technique to display taste for human–computer
interaction.
9.2.2 Food Simulator Project: A Taste Interface
Challenge
In 2001, I launched a project called the “Food Simulator” to develop an interface
device that presents food texture as well as taste. The unsolved problem in taste
9 Taste Interfaces
292
display is a haptics issue. The first goal of the project was developing a haptic
interface for biting. The device should be suitably shaped for placing in the
mouth, and be effectively controlled to simulate food texture. The second goal
was to present a multimodal sensation to the user. To this end, biting sounds
and chemical tastes should be integrated with the haptic interface.
To achieve these goals, we developed a haptic interface to present the biting
force. The Food Simulator generates a force simulating the previously captured
force profiles of an individual biting real food. A film-like force sensor is used to
measure biting force associated with real food. A force sensor is installed in the
Food Simulator and the device is actuated using force control methods.
The Food Simulator is integrated with auditory and chemical sensations asso-
ciated with taste. The sound of biting is captured by a bone vibration microphone.
The sound is then replayed using a bone vibration speaker synchronized with the
biting action. The chemical sensation of taste is produced using an injection
pump, with a tube installed at the end effecter.
9.3
CURRENT IMPLEMENTATIONS
OF THE INTERFACE
The Food Simulator employs mechanical linkages to apply biting force to the
teeth. It is integrated with sound, vibration, and chemical taste.
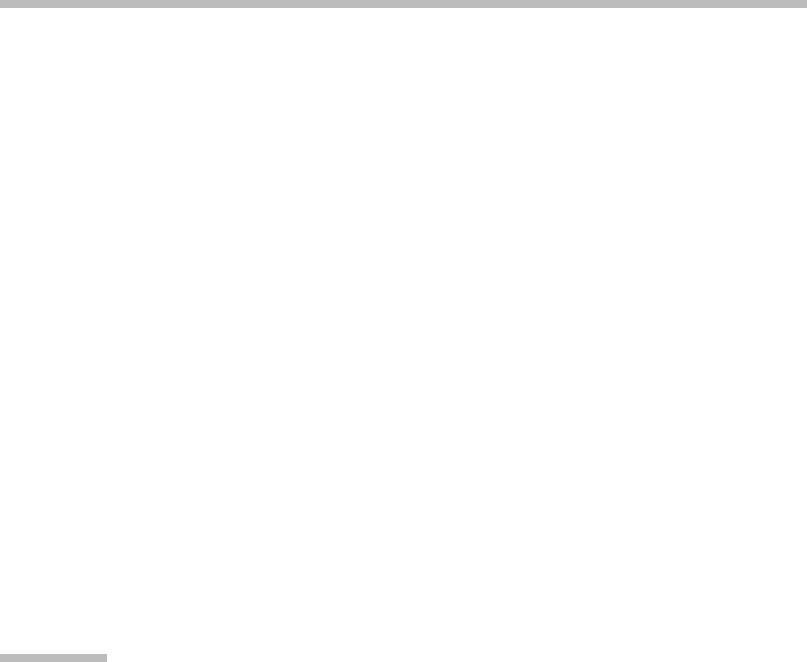
9.3.1 Haptic Device in a Food Simulator
The haptic device is composed of a one degree-of-freedom (DOF) mechanism
that is designed to fit in the user’s mouth. The device is aimed at applying a force
representing the first bite. Chewing is not addressed in this prototype. Thus, the
device is designed to apply force in a direction normal to the teeth. The configu-
ration of the mechanical linkage takes into consideration the jaw structure. The
shape of the linkage enables the application of force to the back teeth. The width
of the end effecter is 12 mm, and the device applies force to two or three teeth.
Regarding hygiene, the end effecter includes a disposable cover of cloth and
rubber. Figure 9.1 shows the overall view of the apparatus.
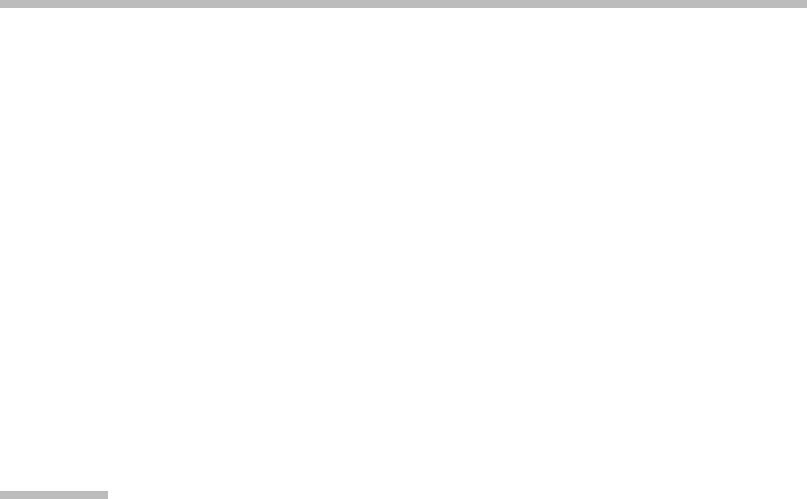
The haptic device is composed of a ones DOF mechanism that employs four
linkages. Figure 9.2 illustrates its mechanical configuration. The linkages are
driven by a DC servo motor (MAXON Motor, RE25). The user bites the end effec-
ter of the device. The working angle of the end effecter is 35 degrees, and the max-
imum force applied to the teeth is 135 N. A force sensor that detects force applied
by the user’s teeth is attached to the end effecter. The device is controlled by a PC
(Pentium 4, 2 GHz). The update rate of force control is 1,700 Hz, which is suffi-
cient for controlling a haptic interface.
9.3 Current Implementations of the Interface
293
9.3.2 Multisensory Display
The second goal of the Food Simulator project was to present multimodal sensa-
tion. We also tried to integrate a multimodal display with the haptic interface.
Sound
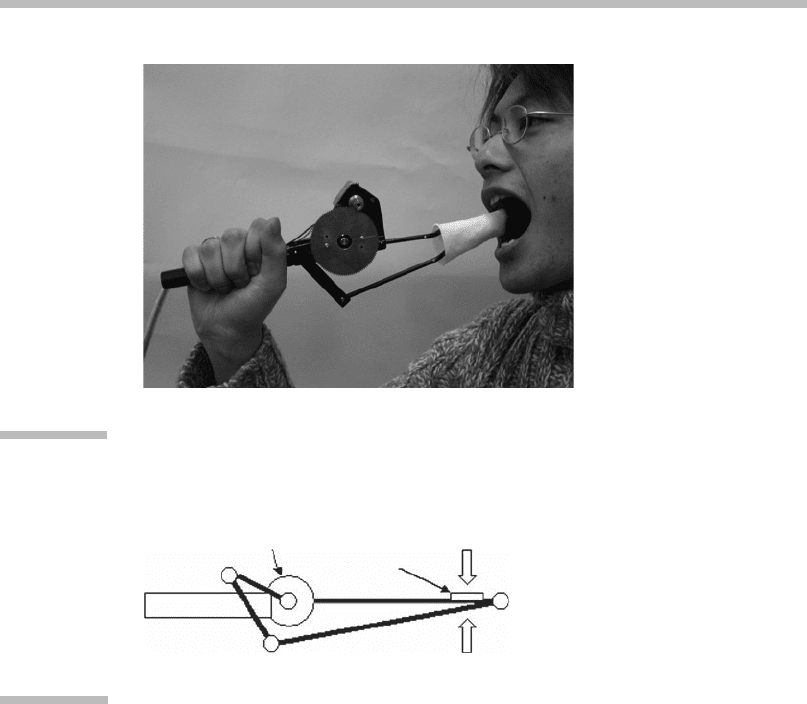
Sound is closely related to biting action. Masti cation of a hard food generates
sound. This sound is perceived by vibration, mostly in the jawbone. Sounds of
biting real food were recorded using a bone vibration microphone. Figure 9.3
shows a recording session. The bone vibration microphone was inserted into
the ear. An accelerometer, installed in the microphone, picked up vibration of
the jawbone.
FIGURE
9.1
Overall view of the apparatus.
The 1-DOF haptic device is a core element of the system.
Motor
Force
sensor
Biting
force
FIGURE
9.2
Mechanical configuration of the haptic device.
Four linkages are employed in the device, which is designed to fit into
the mouth.
9 Taste Interfaces
294
FIGURE
9.3
Measuring biting sound.
An accelerometer picks up vibration of the jawbone while biting real food.
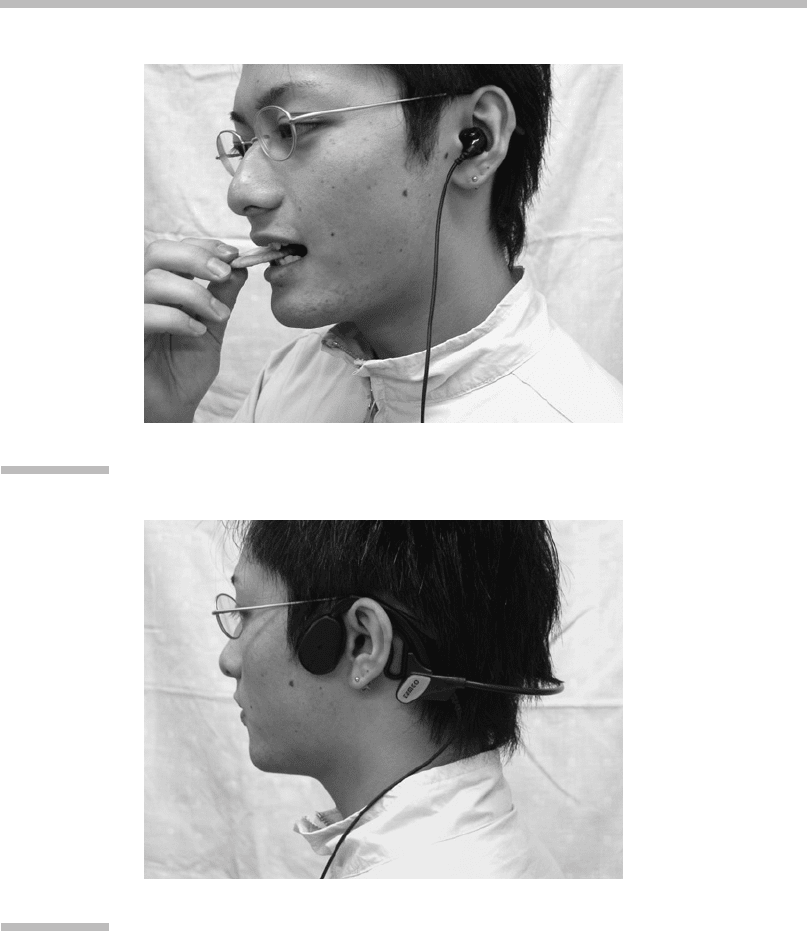
FIGURE
9.4
Bone vibration speaker.
The recorded sound is synchronized with the biting action.
The recorded sound was then displayed using a bone vibration speaker.
Figure 9.4 shows the speaker that generated vibrations in the jawbone. The sound
was synchronized with the biting action. For example, the sound of a virtual
cracker was displayed at the beginning of the second stage of the force control
shown in Figure 9.7 (see page 298).
9.3 Current Implementations of the Interface
295
Chemical Taste
Chemical sensations perceived by the tongue contribute greatly to the sense of taste.
An arbitrary taste can be synthesized from the five basic tastes. Table 9.1 summarizes
common chemical substances for the basic tastes.
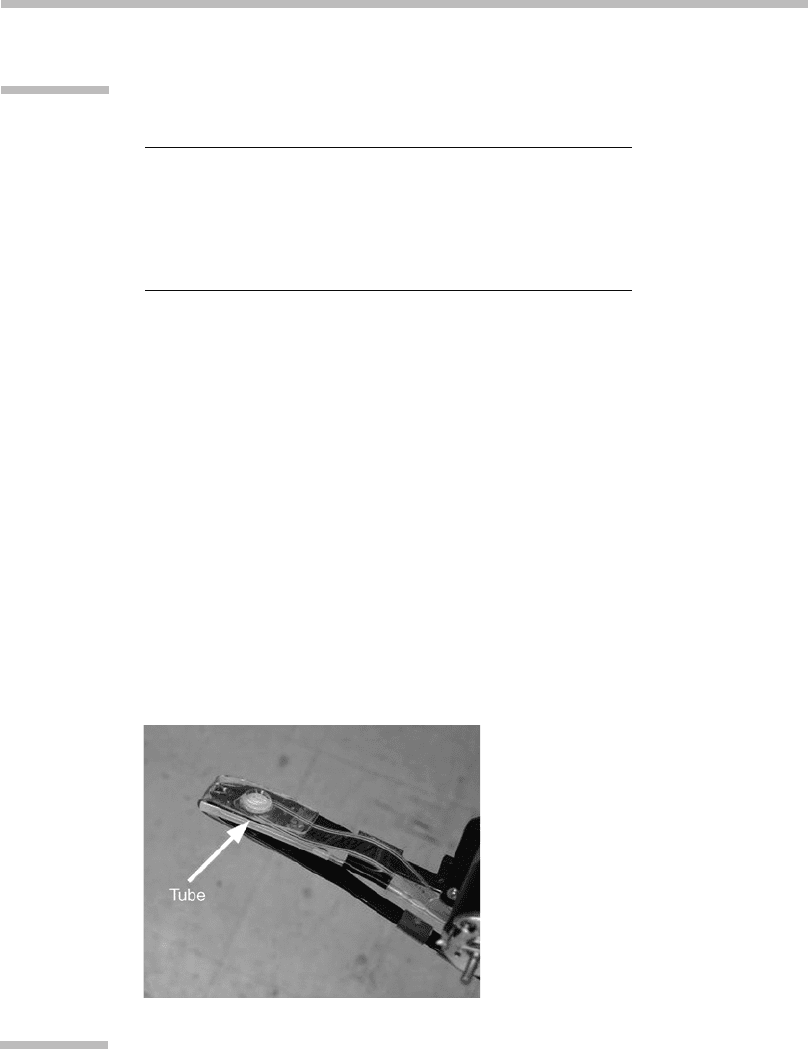
The chemical sensation of taste was presented by injecting a small amount of
liquid into the mouth. A tube was attached to the end effecter of the haptic inter-
face. Figure 9.5 shows the tube at the top end of the linkage. The liquid was trans-
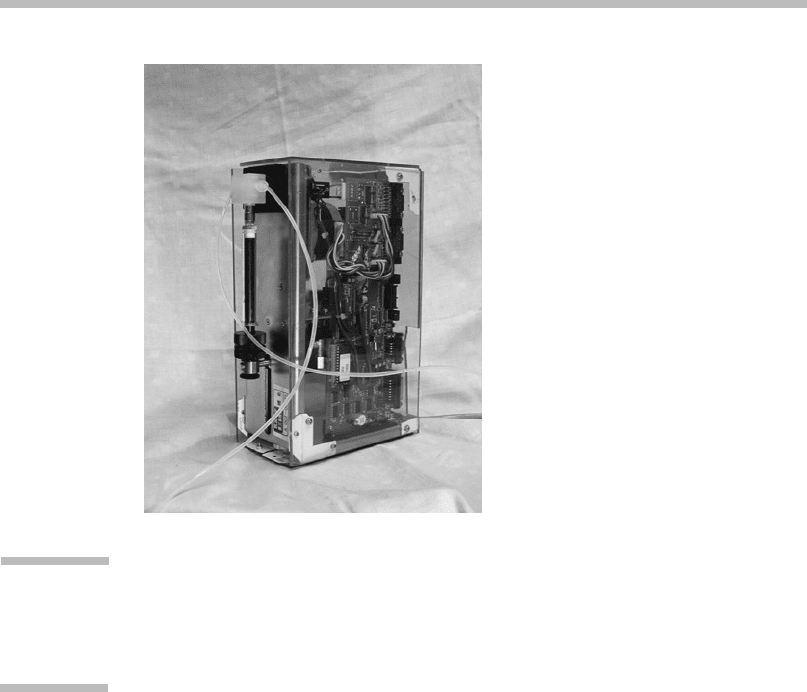
ferred using an injection pump (Nichiryo, DDU-5000). Figure 9.6 shows an overall
view of the injection pump. Injection of the liquid was synchronized with the
biting action. The pump provided 0.5 ml of solution for each bite.
Vision and Smell
Visual and olfactory sensations of food occur independently of the biting action. Thus,
the Food Simulator prototype did not support these sensations. However, head-
mounted displays can provide visualization of food. Also, smell can be displayed using
a vaporizer. These displays could easily be integrated with the haptic interface.
TABLE 9.1 Chemical Substances Used in Synthesis of Five Basic Tastes
Basic Taste Chemical Substance
Sweet Sucrose
Sour Tartaric acid
Salty Sodium chloride
Bitter Quinine sulfate
Umami Sodium glutamate
FIGURE
9.5
Tube for injection of chemical taste.
A small amount of liquid is injected from the top end of the tube into
the mouth.
9 Taste Interfaces
296
9.4
HUMAN FACTORS DESIGN OF THE INTERFACE
The Food Simulator is designed to generate biting force according to that of real
food. There are a number of human factors issues that must be considered when
designing a taste interface.
9.4.1 Measurement of Biting Force of Real Food
The Food Simulator generates force, simulating the force recorded from an indi-
vidual biting real food. A film-like force sensor (FlexiForce, Kamata Industries)
is used to measure this biting force. The sensor has a thickness of 0.1 mm and a
circular sensitive area of 9.5 mm in diameter. The sensing range is 0 to 110, with
the maximum sampling rate of 5,760 Hz. Figure 9.7 shows an overall view of the
sensor. Figure 9.8 shows a view of the participant in the experiment, who is biting
a cracker and the FlexiForce sensor.
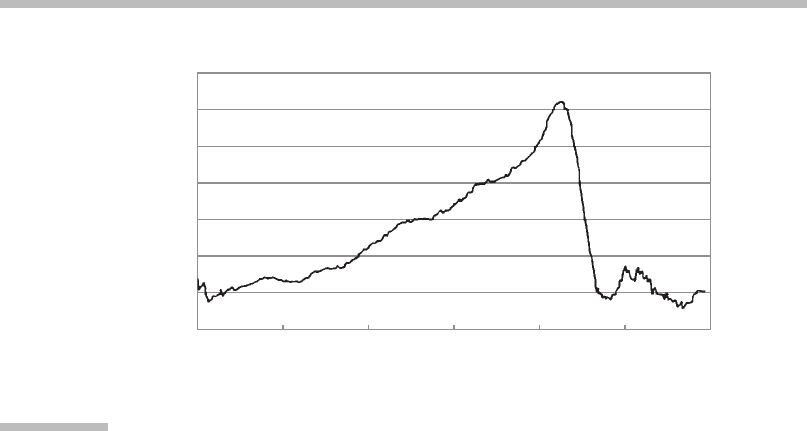
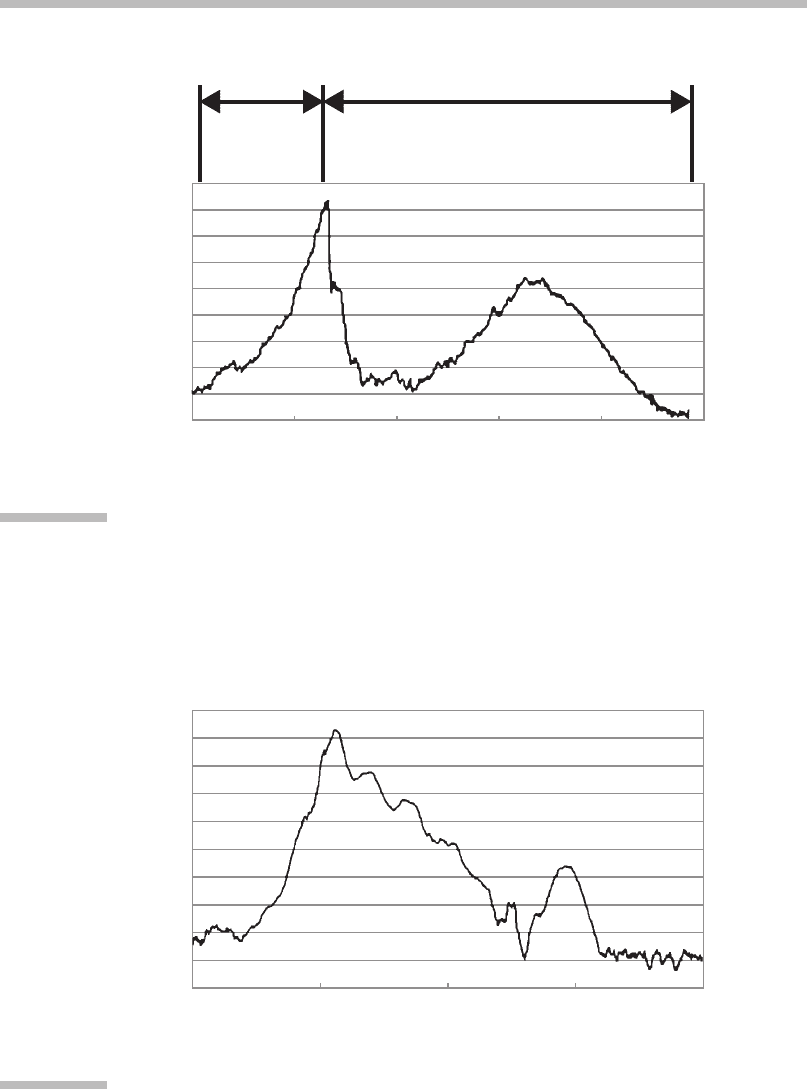
Figure 9.9 shows measured biting force associated with a real cracker. Two peaks
appeared in the profile of the measured force. The first peak represents destruction of
the hard surface of the cracker. The second peak represents destruction of its internal
FIGURE
9.6
Injection pump.
The injection of the liquid is synchronized with the biting action. The pump
provides 0.5 ml of solution for each bite.
9.4 Human Factors Design of the Interface
297
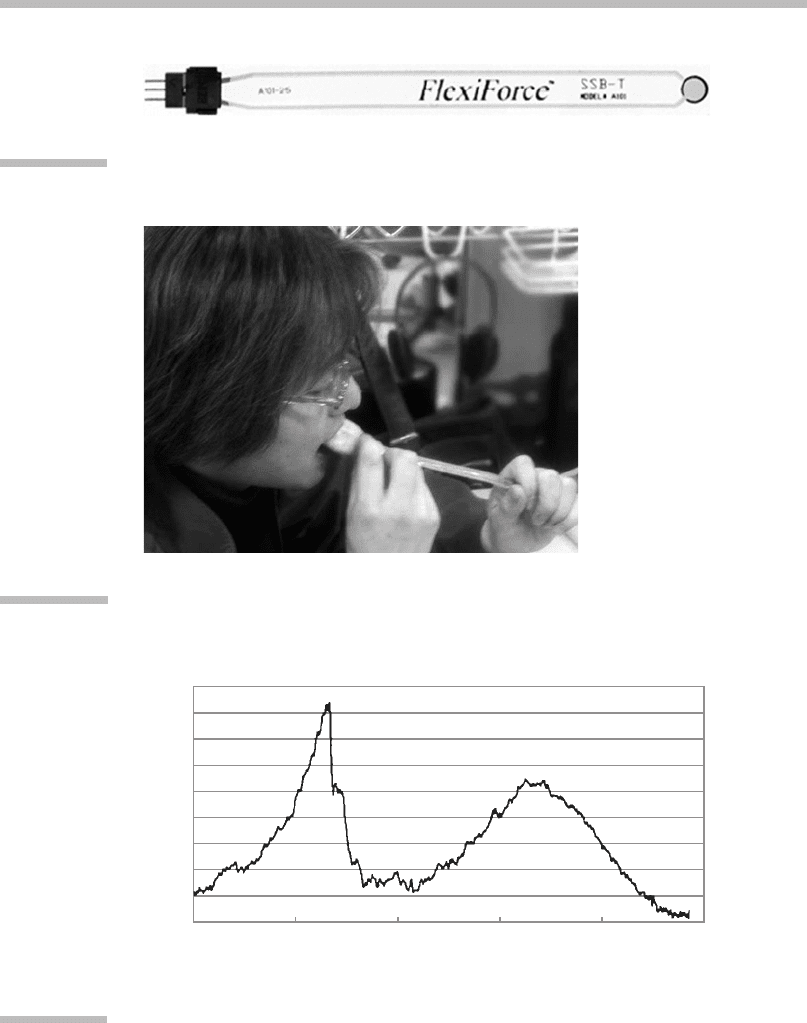
FIGURE
9.8
Force sensor and real food.
The participant is biting real food along with the force sensor.
0
0
1
2
3
4
5
[N]
[s]
6
7
8
9
0.1 0.2 0.3 0.4 0.5
FIGURE
9.9
Measured force of a cracker.
The first peak represents destruction of the hard surface of the cracker.
The second peak represents destruction of its internal structure.
FIGURE
9.7
Film-like force sensor.
The sensor is placed in the mouth with real food to measure biting force.
9 Taste Interfaces
298
structure. Figure 9.10 shows the measured biting force associated with real cheese.
The slope observed in the figure represents the elastic deformation of the cheese.
9.4.2 Method of Generating Biting Force
Two food types are simulated: crackers and cheese.
Crackers
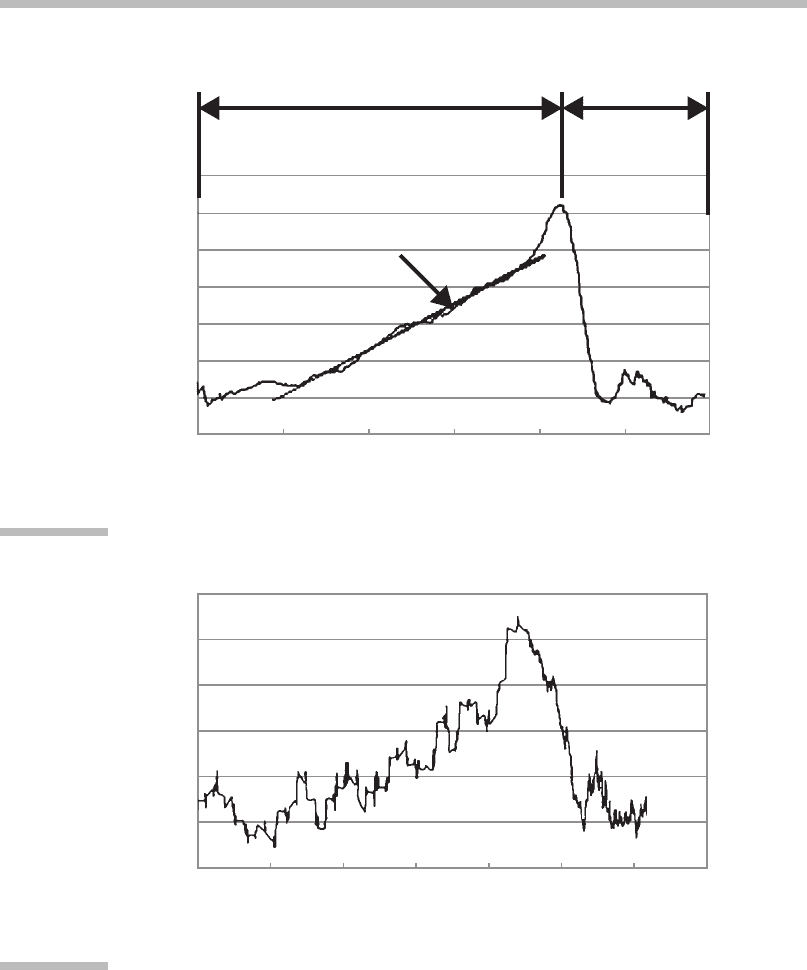
The force control of the device has two stages (Figure 9.11). First, the device applies
force to maintain its position. This process represents the hard surface of the virtual
cracker. When the biting force exceeds the first peak, the force control moves to the
second stage. The device generates the same force as that measured from the real
cracker. This stage is subject to open-loop control. Destruction of the internal struc-
ture of the virtual cracker is simulated by the second stage.
Figure 9.12 shows the measured force of the virtual cracker displayed by the
Food Simulator. The profile of the measured force has two peaks, as in the real
cracker. However, the shape of the profile is different from that associated with
the real cracker. This difference seems to be caused by the open-loop control.
Cheese
Figure 9.13 shows two stages of force control for biting real cheese. In order to sim-
ulate elastic deformation of the cheese, the spring constant of the cheese was esti-
mated from the collected data. The device generates force according to this spring
constant to display the elasticity of the virtual cheese. When the biting force exceeds
the peak force, the control enters the second stage. The device generates the same
0
0
2
4
6
[N]
[s]
8
10
12
14
0.2 0.4 0.6 0.8 1 1.2
FIGURE
9.10
Measured force of cheese.
The slope represents the elastic deformation of the cheese.
9.4 Human Factors Design of the Interface
299
0
0
1
2
3
4
5
[N]
[s]
Stage 1 Stage 2
6
7
8
9
0.1 0.2 0.3 0.4 0.5
FIGURE
9.11
Method of simulation of a cracker.
First, the device applies force to maintain its position. When the biting force
exceeds the first peak, the device generates the same force as that measured
from the real cracker.
0
0
1
2
3
4
5
[N]
[s]
6
7
8
9
10
0.2 0.4 0.6 0.8
FIGURE
9.12
Measured force of a virtual cracker.
Two peaks are observed.
9 Taste Interfaces
300
0
0
2
4
6
[N]
[s]
Spring constant
Stage 1 Stage 2
8
10
12
14
0.2 0.4 0.6 0.8 1 1.2
FIGURE
9.13
Simulation method for cheese.
The device generates force according to the spring constant of the real cheese.
0
0
2
4
6
[N]
[s]
8
10
12
0.2 0.4 0.6 0.8 1 1.41.2
FIGURE
9.14
Measured force of virtual cheese.
The profile resembles the measurements for real cheese.
force as that measured from the real cheese. This stage is subject to open-loop
control. Destruction of the virtual cheese is simulated by the second stage.
Figure 9.14 shows the measured force of the virtual cheese displayed by
the Food Simulator. The profile of the measured force is similar to the real one.
9.4 Human Factors Design of the Interface
301