Кветный Р.Н. и др. Методология построения систем контроля и мониторинга цифровых телекоммуникационных сетей (укр. язык)
Подождите немного. Документ загружается.


20
процедури сигналізації, характерні для певного типу корис-
тувача системи. Контроль цього рівня полягає у аналізі яко-
сті з’єднань та наданих послуг, вимірюванні часу встанов-
лення з’єднання.
В мережі СКС7 можна виділити такі групи вимірювань [4, 6]:
фізичного рівня, до яких відноситься аналіз інтерфейсу пере-
дачі сигналізації;
канального рівня, що передбачає аналіз каналів за параметром
помилки і синхронізації;
мережного рівня, що передбачають аналіз протоколу СКС7 [4,
80].
Вимірювання фізичного рівня зводяться до вимірювань вико-
ристовуваних інтерфейсів, зокрема Е1. Вимірювання канального рівня
включають в себе аналіз цифрових каналів (підрахунок помилок при
передачі, розподіл помилок по каналу, порушення синхронізації) [4].
Вимірювання мережного рівня в мережі зводиться до різнома-
нітних задач аналізу протоколів мережі. Для аналізу протоколів вико-
ристовуються спеціальні аналізатори протоколів. Аналізатор протоко-
лу включається паралельно до лінії передачі даних, і не впливає на
роботу мережі.
ІВС контролю телекомунікаційної мережі на базі аналізу даних СКС
7
ЦАТС
ЦАТС
ЦАТС
ЦАТС ЦАТС
ЦТМ
SP
SP
SP
SP
SP
Мережа
СКС 7
Канали
сигналізації
Пункти
сигналізації
Рис. 1.6. Схема взаємодії ІВС з ЦТМ через систему сигналізації СКС7
Для мережі СКС7 вимірювання на фізичному та канальному
рівнях мережі є неактуальними, оскільки в ній використовуються ка-
21
нали вторинної мережі телефонії. Таким чином, вимірювання на ме-
режі СКС 7 зводяться до аналізу протоколів сигналізації [4].
На рис. 1.6. зображена схема взаємодії ІВС для контролю ЦТМ
з мережею СКС7.
Як видно зі схеми, для контролю цифрової телекомунікаційної
мережі, що побудована на основі системи сигналізації СКС7, необхід-
но і достатньо аналізувати протоколи сигналізації СКС7. Всі парамет-
ри, що необхідні для аналізу ЦТМ, досить просто отримати шляхом
аналізу сигналізації СКС7. Так, наприклад, затримки в мережі можна
виміряти завдяки тому, що на кожне передане повідомлення повинно
прийти підтвердження прийому. Різниця в часі між передачею повід-
омлення і прийомом підтвердження на нього і є затримкою в мережі.
Рівень помилок в мережі дозволяють обчислити протоколи підсисте-
ми передачі повідомлень, що містять такі механізми контролю поми-
лок, як підрахунок контрольної суми (CRC), вставка бітів (HDLC) та
ін.
1.3.1. Системне і експлуатаційне вимірювальне обладнання
цифрових телекомунікаційних мереж
Всю вимірювальну техніку сучасних телекомунікацій можна
умовно розділити на два основних класи: системне і експлуатаційне
вимірювальне обладнання [4].
Як показано нижче, вимоги до обох класів суттєво відрізня-
ються, відповідно відрізняються функції приладів, схеми їх викорис-
тання, специфікації тестів тощо.
До системного обладнання відноситься вимірювальне облад-
нання, що забезпечує настройку мережі в цілому і її окремих вузлів, а
також наступний моніторинг стану всієї мережі. Системним воно на-
зивається тому, що сучасне обладнання цього класу має широкі мож-
ливості інтеграції у вимірювальні комплекси, мережі вимірювальних
приладів і входження в якості підсистем в інформаційно-вимірювальні
системи контролю ЦТМ.
Експлуатаційне вимірювальне обладнання повинно забезпечу-
вати якісну експлуатацію окремих вузлів мережі, супроводження мон-
тажних робіт і оперативний пошук поломок. Розділивши весь спектр
обладнання на два основних класи, легко зрозуміти вимоги до кожно-
го з них [4].
Для системного обладнання основною вимогою є максимальна
функціональність приладу: його специфікація тестів повинна відпові-
дати всім існуючим і більшості перспективних стандартів і методоло-
гій. В іншому випадку прилад не забезпечить повної настройки і оцін-
ки параметрів мережі або пристрою, що тестується .
22
Другою вимогою є можливість інтеграції в системи приладів і
інтеграції з обчислювальними засобами і мережами передачі даних.
Це також суттєво в умовах створення ІВС контролю ЦТМ, куди пови-
нні бути включені засоби вимірювання.
Зручність роботи є наступним по важливості параметром. Є
ряд багатофункціонального системного обладнання з “недружніми”
інтерфейсами. Використання таких приладів потребує від спеціаліста
довгого вивчення приладу, що не завжди ефективно.
Вартість для системного обладнання не є першочерговим кри-
терієм вибору, оскільки для приладів такого класу вартість знаходить-
ся в прямій залежності від функціональності. Портативність для тако-
го класу обладнання не потрібне.
В то й же час експлуатаційне обладнання, в першу чергу, по-
винно бути портативним і дешевим, потім надійним і вже після цього
багатофункціональним.
Слід одразу відмітити, що приведена класифікація вимірюва-
льного обладнання є умовною, враховуючи загальну тенденцію до мі-
ніатюризації в сучасній електронній промисловості [4].
1.3.2. Відомі засоби вимірювання та контролю цифрових
телекомунікаційних мереж зі спільноканальною сигналізацією
№7
Для розв’язання задач контролю мереж СКС на основі концеп-
ції TMN на початку 90-х років МСЕ запропонувала обладнати пункти
сигналізації СКС7 прикладною підсистемою ОМАР [114]. Однак, ба-
гатоваріантність реалізацій, що допускається рекомендацією по TMN і
складність протоколу CMIP, що лежить в основі ОМАР і пропонуєть-
ся МСЕ для підтримки взаємодії між мережевими елементами і систе-
мами експлуатаційного управління, привела до того, що виробники
комутаційного обладнання використовують як для контролю елемен-
тів мережі СКС7, так і для дистанційного керування ними, власні,
більш прості, але не сумісні між собою протоколи.
Зазвичай це робиться спеціально, для того щоб виключити мо-
жливість несанкціонованого доступу до управління своїм обладнан-
ням. Це призводить до неможливості забезпечити простим способом в
єдиному центрі експлуатаційне управління пунктами сигналізації різ-
них виробників. Окрім того, комутаційне обладнання, що знаходиться
в режимі перевантаження, може неадекватно відображувати стан ке-
рованих ним елементів мережі СКС7, але саме такі моменти являють
собою найбільшу практичну зацікавленість при технічній експлуатації
мережі.
23
В зв’язку з цим практичне поширення отримали системи роз-
поділеного моніторингу мережевих елементів, що основані на пасив-
ному підключенні до ланок СКС7 моніторів сигналізації.
На сьогоднішній день існує ряд систем моніторингу мережі
СКС7 [3-6, 15, 16, 80]. Серед них можна виділити: AcceSS7 фірми
Hewlett-Packard, Network Wide View-7 фірми General Signal Networks,
QUEST7 компанії GN Nettest. Ці системи близькі за структурою і ви-
конуваними функціями. Однак ці системи надзвичайно дорогі (за не-
офіційними даними порядку 50 млн. $, для мережі Deutsche Telecom).
Окрім того, ці системи розраховані на західну модель телекомуніка-
ційної мережі, англомовні і не підтримують національних (країни
СНД) версій СКС7. Тому оптимальним рішенням для країн СНД є
впровадження системи, що виготовлена в межах СНД, з можливістю
супроводу і врахування національної специфіки. Крім системи, опи-
саної в даній роботі, відома система “СПАЙДЕР” (ЛОНДІЗ, Росія) [4,
80]. Існують і інші рішення моніторингу мережі СКС7. Наприклад,
центри управління мережею провідних фірм виробників 1300NMC
Alcatel, ETNA-NEM та NMAS Ericsson, O&MS Siemens, Net Minder і
MFOS Lucent Technologies та ін., являють собою єдиний комплекс ко-
нтролю і управління елементами мережі і транспортною мережею в
цілому, але кожний центр використовується для свого типу комута-
ційних систем. При різноманітності комутаційного обладнання, що
характерне для країн СНД використання таких центрів не є доціль-
ним.
Тому актуальною задачею є розробка вітчизняної системи, що
базується на спеціалізованій концепції побудови ІВС контролю ЦТМ,
та для якої забезпечується супровід, подальший розвиток, підтримка
національної версії СКС7, специфіки конкретної мережі, захисту ін-
формації про національні ЦТМ.
1.4. Особливості вимірювання параметрів цифрових теле-
комунікаційних мереж
Основними особливостями вимірювання (для охоплення ЦТМ)
є такі:
необхідність узагальнення результатів вимірювання отри-
маних з різних первинних перетворювачів;
кількість первинних перетворювачів дорівнює кількості ла-
нок сигналізації у мережі, що контролюється;
надійність роботи первинних перетворювачів повинна бути
на порядки вища за надійність мережі.
24
Враховуючи, що аналіз та вимірювання в ЦТМ з СКС7 зво-
дяться до аналізу протоколів сигналізації СКС7, розглянемо викорис-
тання аналізаторів протоколу у якості первинного перетворювача для
ІВС.
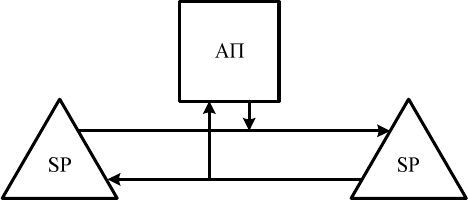
На рис. 1.7. представлена схема підключення аналізаторів про-
токолів до мережі СКС7.
SP – пункт сигналізації
АП – аналізатор протоколу
Рис. 1.7. Підключення аналізатора протоколу до ланки мережі СКС7
Аналізатор протоколу є найменшою структурною одиницею
інформаційно-вимірювальної системи. Він являє собою спеціальний
контролер, що забезпечує сумісність з потоком ІКМ (Е1). На наступ-
ному рівні системи аналізатори з’єднані між собою в мережу. Через
мережу виконується управління аналізаторами, а також централізова-
ний збір даних.
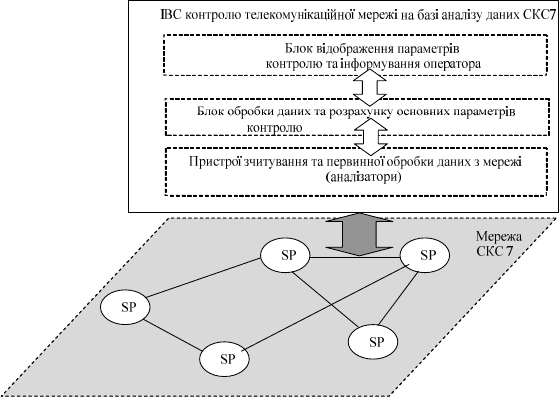
Узагальнену структурну схему ІВС показано на рис. 1.8.
1.5. Загальна характеристика відомих систем моніторингу з
огляду умов моніторингу мережі ВАТ "Укртелеком"
Спільноканальна сигналізація (СКС) України введена в дію
порівняно з США і країнами ЄС недавно і на сьогодні займає прибли-
зно 15–20% міського і міжміського комунікаційного трафіку. Особли-
вістю мережі СКС України є те, що в якості носіїв сигналізації вико-
ристовують застарілі лінії у вигляді пучків витих пар з пропускною
здатністю 2,048–8,192 Мбіт/с і, в той же час, оптичні лінії з пропуск-
ною здатністю до 600 Мбіт/с. Лінії першого типу і оптичні лінії вико-
ристовують підрозділи Укртелекому, їх можуть орендувати приватні
оператори: UMC, Utel, Київстар та інші. При цьому, у мережі тільки
частина обладнання являє собою інтелектуальні системи, здатні реалі-
зувати протоколи СКС, а переважна більшість комунікаційних систем
виконана як кінцеві автомати, наприклад “ИКМ-120” або “Кварц”.
25
Неоднорідність обладнання, створеного з різними вимогами до
параметрів, призводить до того, що первинна мережа є плезисинхрон-
ною і тому виникає проблема синхронізації прийому даних у системі
моніторингу відповідно до кожного із контрольованих пунктів сигна-
лізації. На відміну від комутаційних систем, де кожну похибку пере-
дачі можна компенсувати повторною передачею, система моніторингу
похибки, викликані короткочасною девіацією несучої частоти, при па-
сивному паралельному підключенні компенсувати не може і тому во-
на повинна бути асинхронною і здатною до адаптації до кожного із
контрольованих каналів передачі даних. Вона може цілком компенсу-
вати похибки при підключенні у розриві лінії, але такий спосіб без на-
гальної необхідності у зв’язку з іншими застосуваннями не є бажаним
у загальному по комутаційній мережі.
Рис. 1.8. Узагальнена структурна схема ІВС
Взаємодія телекомунікаційних систем основана на обміні іні-
ціюючими сигнальними пакетами, що містять запит на послугу, і сиг-
нальними пакетами підтвердження, що містять позитивну або негати-
вну відповідь на послугу. Визначення часу взаємодії сигнальних по-
відомлень і ідентифікація з'єднань системою моніторингу затрудня-
ється тим, що, як в локальних, так і в глобальних телекомунікаційних
мережах, ініціюючі пакети і пакети підтвердження можуть передава-
тись по віртуальних маршрутах, що виконують різні фізичні апаратні
26
засоби. Оскільки моніторинг і тестування може здійснюватися не
тільки на кінцевих пунктах повідомлень (в пунктах створення з'єд-
нань), але й на транзитних пунктах мережі, то, щоб уникнути ситуації,
коли час реєстрації пакета підтвердження менше часу ініціюючого па-
кета, таймери пристроїв системи моніторингу на всіх сигналізаційних
пунктах мережі повинні бути синхронізовані [74]. Таймери можуть
бути синхронізовані на рівні устаткування, що приймає сигналізаційні
пакети, або на рівні серверів, що архівують і групують пакети по їх
взаємозв’язку. Максимальна допустима похибка визначення часу не
повинна бути більшою часу реакції комутаційного обладнання на за-
пит. Із аналізу даних моніторингу з урахуванням росту пропускної
здатності комунікаційних систем і росту швидкості передачі даних
похибка синхронізації не повинна перевищувати 1 мс, тому що, на-
приклад, час взаємодії пакетів сигналізації СКС7 на найбільш розви-
нутому комутаційному устаткуванні мобільних операторів може бути
порядку 3-5 мс. Для синхронізації часу на рівні серверів існують спе-
ціальні протоколи (наприклад, NETworkTime). Але доступ первинних
даних до сервера може складати кілька ступенів обміну, що може ви-
кликати значну затримку, яка визначається завантаженням обладнан-
ня і пріоритетністю виконуваних задач. Тому час краще визначати об-
ладнанням, що реєструє дані. Для синхронізації часу використовують
приймачі ГЛОНАСС/GPS (наприклад, Україна, м. Сміла, СН-3841),
що формують значення часу з точністю до секунди і сигнал синхроні-
зації секунди 1PPS. Точність визначення часу пристроєм, що викорис-
товує приймач ГЛОНАСС/GPS, залежить від часу реакції на сигнал
1PPS. Найбільше значення цього часу визначає похибку у вимірюван-
ні часу даним пристроєм. Значення часу і сигнал 1РРS приймач пере-
дає за допомогою одного із стандартних інтерфейсів, зазвичай RS232,
і тому він може бути доступний для прийому без будь-якого додатко-
вого обладнання будь-яким із існуючих серверів. Якщо комп’ютер
пристрою реєстрації даних працює під керуванням операційної систе-
ми типу Windows NT/2000/XP або Unix, то час реакції на сигнал 1PPS
через переривання програми його процесора, ініційоване портом
RS232, може складати від кількох мікросекунд до десятків мілісекунд
в залежності від виконуваних задач. Тому визначення часу прийому
пакетів на рівні комп’ютера може мати велику похибку і є неприйнят-
ним для системи моніторингу.
Однією із задач моніторингу є дослідження та аналіз ефектив-
ності топології мережі, її оптимізація на основі моделі передачі даних.
Основним параметром оцінювання моделі являється середнє значення
T та дисперсія
2
затримки сигнальних повідомлень у ланках мере-
жі, визначені виразами (2.46) і (2.47). Очевидно, що модель може аде-
27
кватно відображати динаміку взаємодії ланок сигналізації за умови,
що похибки оцінок часу передачі i-тим пунктом сигналізації (ПС
і
)
i
t
і прийому ПС
j
j
t
в сумі значно менші
T , тобто
Ttt
ji
.
Для виконання даної умови поставимо задачу визначення часу
з похибкою, дисперсія якої
22
t
.
Із даних моделі виходить, що
2
t
0,1 мс.
Таким чином, сформульовані дві основні вимоги до синхроні-
зації даних та часу у системі моніторингу: прийом даних потрібно ви-
конувати асинхронно з адаптацією до кожного з каналів окремо; ви-
значення часу прийому даних і синхронізацію його з мітками часу си-
стеми ГЛОНАСС/GPS потрібно виконувати на рівні обладнання, що
приймає дані і працює як кінцевий автомат, здатний реагувати на по-
дії в системі у реальному часі із затримкою не більше 0,1 мс.
Розглянемо відомі системи моніторингу з огляду на відповід-
ність зазначеним вимогам.
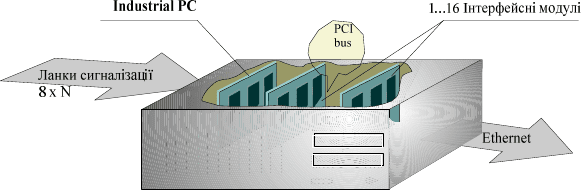
Рис. 1.9. Загальна компоновка пристрою для системи моніторингу
Лідером у розробці систем моніторингу є компанія Inet
Technologies, Inc. (США). Її системи на даний час впроваджені пере-
важною більшістю телекомунікаційних операторів зв’язку США і Ка-
нади, BundesTelecom та ін. Системи компанії Inet виконані як мережа
пристроїв GeoProbe (http://www.inet.com/001spectra_01.0403.pdf). За-
гальна структура пристрою зображена на рис. 1.9, вона є типовою для
більшості аналогічних систем. До складу пристрою входять централь-
ний процесор (ЦП) у форматі Industrial PC із типовим набором портів і
засобів збереження й обміну даних, що виконує функцію реєстрації
даних та сервера, і від одного до шістнадцяти інтерфейсних модулів
28
(ІМ), призначених для підключення до ліній зв'язку і до центрального
процесора за допомогою уніфікованих інтерфейсів: інтерфейсу з носі-
ями телекомунікаційної сигналізації – первинними цифровими пото-
ками (ПЦП) із структурою E1 (T1 або J1); інтерфейсу із шиною типу
PCI (PCI Specification 2.1). Інтерфейсні модулі виконують функцію
первинної обробки ПЦП з метою вибірки пакетів даних. За допомо-
гою об’єднувальної панелі й шини PCI інтерфейсні модулі підключа-
ють до центрального процесора. В залежності від кількості потоків
E1/T1/J1 і їхнього територіального розташування конфігурують сис-
тему моніторингу з деякого числа пристроїв. Пристрої об'єднують в
мережу за допомогою портів Ethernet, що входять до складу ЦП.
В Росії підрозділами Ростелекому та деякими операторами
зв’язку впроваджена система Spider [80] – розробка провідного галу-
зевого інституту ЛОНИИС. Система Spider містить три рівні. Перший
рівень складають пристрої для моніторингу телекомунікаційної сиг-
налізації Spider-RU, другий рівень складають пристрої для збору да-
них і управління Spider-C, з’єднані зі Spider-RU комунікаційними лі-
ніями типу ПЦП, третій рівень складають сервери Spider-T, що
об’єднані між собою та попереднім рівнем мережею Ethernet. Кожен
пристрій Spider-RU містить до восьми інтерфейсних модулів, що міс-
тять інтерфейси з ПЦП і ЦП із типовим набором портів і засобів збе-
реження й обміну даних [80].
Відома система моніторингу компанії Telesoft-technologies
(США) на основі мережі пристроїв ANSTY 4000 Monitoring Probe
(Ansty_4000Mon_DS.pdf). Наведемо докладніше опис зазначеного
пристрою, тому що його конструктивні особливості спільні з
GeoProbe (Inet) та низкою інших систем. До складу ANSTY-4000 вхо-
дять центральний процесор, що містить порти Ethernet, RS232 і порт
керування та відображення, і від одного до шістнадцяти інтерфейсних
модулів (ІМ) МPAC2400 (IPAC_2400.pdf), з’єднаних між собою і з
центральним процесором шиною PCI. Структура ІМ приведена на рис.
1.10. Кожен з інтерфейсних модулів містить системний процесор
(System processor) і сигнальний процесор (DSP), вісім блоків інтер-
фейсу з ПЦП стандарту Е1/Т1 (E1/T1 Interface), комутаційну матрицю
(Switch matrix). Системний процесор за допомогою шини адресу-
даних (AD) і блока мосту (PCI bridge) з’єднаний з системною шиною
ЦП стандарту PCI, конструктивно виконаною як Compact PCI. Зовні-
шні аналогові входи і виходи блоків інтерфейсу призначені для під-
ключення до ліній ПЦП, що контролює система моніторингу, їх циф-
рові входи і виходи підключені до першої групи виходів і входів ко-
мутаційної матриці, що виконує функції комутації канальних інтерва-
лів ПЦП до другої і третьої груп входів і виходів, підключених до сис-
29
темного і сигнального процесорів. Системний процесор містить порт
Ethernet і блок постійної пам'яті, що дозволяє використовувати даний
ІМ як у складі пристрою з декількох ІМ під керуванням центрального
процесора, так і автономно, керуючи ІМ за допомогою порту Ethernet.
Блок постійної пам'яті в автономному режимі використовують для по-
чаткового завантаження системного і сигнального процесорів. Сигна-
льний процесор виконує функції прийому і передачі сигнальних паке-
тів, системний процесор виконує функції обробки сигнальних пакетів
по протоколах високого рівня (для СКС7 - MTP3 [106], ISUP [106],
TCAP [111-115], SCCP [110] і ін., див. рек. ITU Q.704 - Q.780, MAP
рек. GSM 09.02).
Недоліком наведеної структури є те, що можлива втрата даних,
коли частота синхронізації комутаційної матриці має девіацію (jitter)
по відношенню до частоти синхронізації вхідних ПЦП. Це пов’язано з
плезисинхронністю ПЦП і власною частотою синхронізації комута-
ційної матриці ІМ в тих випадках, коли ПЦП виділені із оптичних
транспортних потоків і відсутня жорстка синхронізація. Наступним
недоліком є те, що використання в кожному ІМ системного процесора
призводить до ускладнення пристрою і зайвих затрат, так як обробку
протоколів високого рівня може виконувати ЦП, значно переважаю-
чий по продуктивності системний та сигнальний процесори. У наве-
деному пристрої в якості системного процесора використано мікро-
процесор MPC860, тактова частота якого 66 МГц, тоді як тактова час-
тота ЦП може бути 3000 МГц і вище, тому системний процесор потрі-
бний тільки у випадку, коли ІМ працює автономно. Розподілення за-
дач аналізу протоколів високого рівня по системних процесорах кіль-
кох ІМ недоцільно, тому що значну частину сигнальних потоків
транспортують по віртуальних каналах, що можуть переноситись різ-
ними фізичними носіями. Тому можливі ситуації, коли пакети одного
з’єднання отримані різними ІМ і щоб звести трасу з’єднання (CDR)
необхідно організувати обмін між ІМ. Із структури ІМ (див. рис. 1.10)
видно, що такий обмін можливий через порт Ethernet і проміжний
сервер, або через ЦП. В обох випадках це не проста задача, що ускла-
днює роботу програмного забезпечення і потребує певних ресурсів
системи.
Загальним недоліком описаних вище систем є те, що вони не
передбачають жорстку синхронізацію часу прийому сигнальних по-
відомлень. Час можна синхронізувати за допомогою приймачів точно-
го часу, що підключені до одного із стандартних портів, котрий об-
слуговується операційною системою, а це, як було показано вище,
може призвести до значних похибок у визначенні моменту реєстрації
сигнальних повідомлень. Важливим недоліком також є те, що існуючі