Лазарев Ю.Ф. Mатематическое моделирование физических процессов и технических систем в MATLAB
Подождите немного. Документ загружается.

211
Количество устанавливаемых параметров и их смысл автоматически изменяются при переходе к другому типу
фильтра.
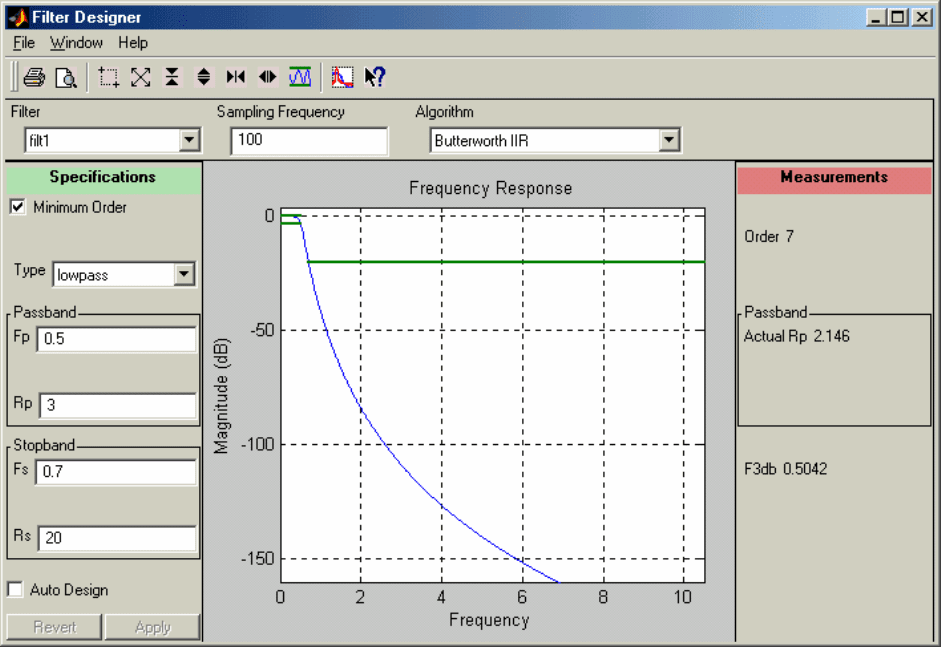
Например, устанавливая алгоритм фильтра Баттерворта нижних частот с граничными частотами полос пропус-
кания в 0.5 Гц и задерживания в 0.7 Гц (cм. рис. 5.84) и нажимая кнопку Apply, получим параметры такого
фильтра и запишем их в объект
'filt1' .
Рис. 5. 84. Проект фильтра низких частот Баттерворта
Просмотр свойств фильтра
После создания фильтра можно просмотреть графики различных характеристик спроектированного и записан-
ного фильтра. Для этого достаточно выделить имя фильтра, свойства которого нужно посмотреть, в окошке
Filters окна
SPTool
, а затем нажать кнопку
View
под этим окошком.
Например, для только что созданного фильтра
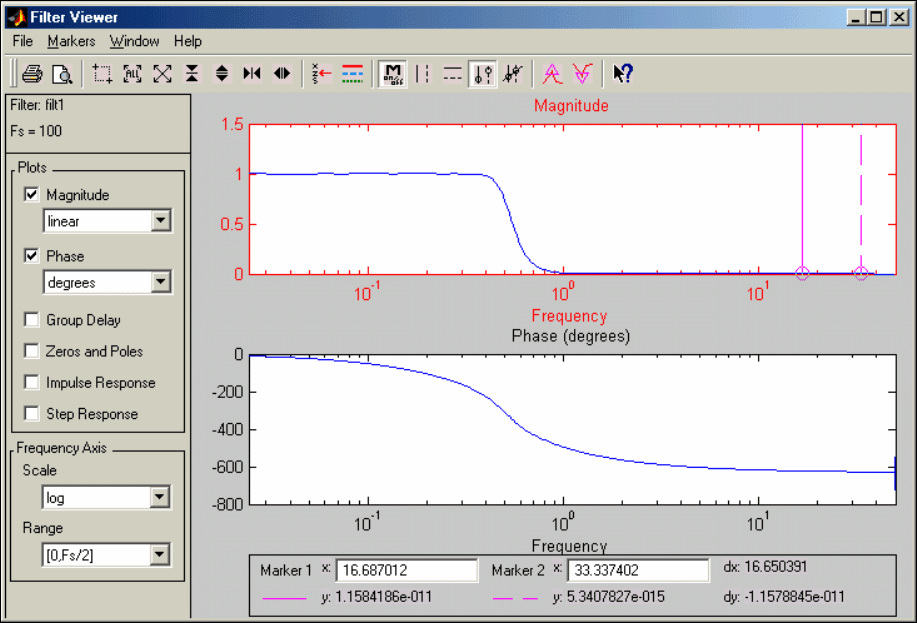
'filt1' мы получим в результате на экране новое окно Filter
Viewer
с картиной, показанной на рис. 5.85.
212
Рис. 5. 85. Окно Filter Viewer
Как видим, в окне выведены графики АЧХ и ФЧХ фильтра.
В число средств просмотра фильтров входят (см. левую сторону окна
Filter Viewer
):
- возможность вывода на экран одновременно любого сочетания из таких графиков: АЧХ, ФЧХ, час-
тотной зависимости группового времени замедления, графического представления расположения ну-
лей и полюсов дискретной передаточной функции в Z-плоскости, графика временного отклика
фильтра на импульсное единичное воздействие и графика отклика на ступенчатое единичное воздей-
ствие; для этого надо установить
флажки на нужных видах графиков в области Plots (графики) окна;
- возможность изменить вид шкалы как по оси частот, так и по оси амплитуд, установить диапазон
представления графиков по частоте и изменить единицы представления фазового сдвига (области
Plots и FrequencyAxis).
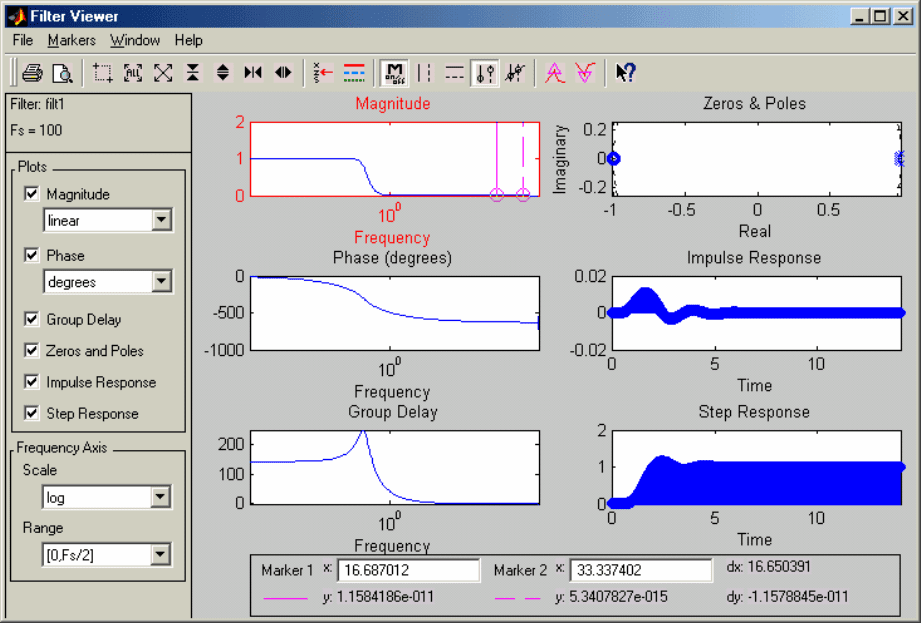
Пример вывода одновременно всех доступных графиков показан на рис. 5. 86.
213
Рис. 5. 86. Возможные виды графиков в окне Filter Viewer
Применение разработанного фильтра для фильтрации
Использование в среде sptool разработанного фильтра чрезвычайно просто. Для этого нужно в окне
SPTool в
окошке Signals выделить имя сигнала, который нужно преобразовать с помощью фильтра, в окошке Filters -
имя фильтра, с помощью которого надо преобразовать этот сигнал и нажать команду Apply. в результате в пер-
вом окошке (Signals) появится имя нового сигнала, начинающееся с сочетания sig с последующим порядковым
номером.
Полученный сигнал можно просмотреть, как
это было описано ранее, используя команду View.
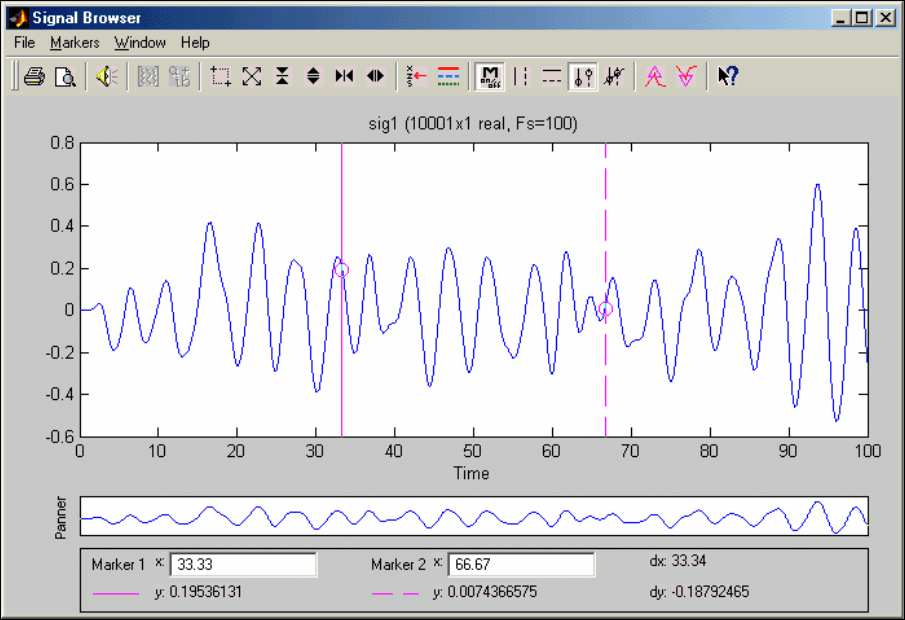
Например, применяя только что разработанный фильтр 'filt1' к процессу X(t), получим процесс, изображенный
на рис. 5. 87.
214
Рис. 5. 87. Результат прохождения сигнала X(t) через фильтр Filt1
Спектральные характеристики полученного процесса можно изучить, применяя раздел Spectra, как это было
описано.
Вторичное использование результатов SPTOOL
При завершении сеанса работы с sptool система запрашивает, нужно ли записать полученные результаты на
диск. В случае положительного ответа она сохраняет все данные в файле с расширением SPT. Кроме
того, в
меню File окна
SPTool
предусмотрены команды записи в файл (см. рис. 5.74)
Save Session
и
Save
Session As
.
При повторном запуске sptool можно воспользоваться результатами такого сохранения результатов, используя
команду Open Session и выбирая один из записанных SPT-файлов.
5.6. Вопросы для самопроверки
1. Что входит в понятие цифровой обработки сигналов?
2. Какие задачи можно решить с помощью пакета
Signal
?
3. Что такое фильтрация сигналов, какими средствами она обеспечивается?
4. Что такое фильтр низких частот, фильтр высоких частот, полосовой фильтр и режекторный фильтр?
5. Что такое БИХ и КИХ фильтры?
6. Какими средствами в
Signal
обеспечивается проектирование фильтров?
7. Какие интерактивные средства предусмотрены в пакете
Signal
?
8. Какими средствами генерирования процессов обладает пакет
Signal
?
9. Как в пакете
Signal
обеспечить генерирование и анализ случайных процессов?

215
Урок 6. Исследование линейных стационарных систем
(пакет CONTROL Toolbox)
Общая характеристика процедур пакета CONTROL
Ввод и преобразование моделей
Получение информации о модели
Анализ системы
Интерактивный обозреватель ltiview
Синтез системы
Вопросы для самопроверки
216
В теории автоматического управления сложился собственный, чрезвычайно удобный и практичный
математический аппарат, позволяющий эффективно исследовать поведение линейных стационарных систем
автоматического управления.
Линейными стационарными системами (в дальнейшем – ЛСС) принято называть такие системы, поведение
которых достаточно удовлетворительно описываются системой обыкновенных линейных дифференциальных
уравнений с постоянными коэффициентами. Математическая теория таких систем достаточно полно и
хорошо
разработана, т. е. полные решения соответствующей системы дифференциальных уравнений можно найти
практически для любого вида внешних воздействий и возмущений. Особенно эффективен для исследования
таких систем так называемый частотный подход, когда анализируются частотные свойства системы при
изменении частоты внешнего гармонически изменяющегося во времени воздействия в широких пределах.
Соответствующие частотные характеристики
системы (амплитудная и фазовая) в этом случае полностью
характеризуют и временные свойства системы при произвольном законе изменения воздействий во времени.
Поэтому для анализа ЛСС используются такие специфические характеристики ЛСС, как передаточные
функции, частотные передаточные функции, амплитудно-частотные и фазо-частотные характеристики, а также
такие методы представления систем, как пространство состояния и
др. Хотя эти методы и характеристики
разработаны и наиболее эффективны для анализа и синтеза систем автоматического управление, они могут
быть с успехом применены для исследования любых динамических систем, описываемых линейными
дифференциальуравнениями с постоянными коэффициентами
Пакет CONTROL предназначен для исследования линейных стационарных систем средствами теории
автоматического управления.
6.1. Общая характеристика процедур пакета CONTROL
Первое представление о пакете CONTROL можно получить, изучая раздел 4.2.2. этого пособия. Ниже приведен
сжатый перечень основных процедур пакета CONTROL, сгруппированных по общности функционального
назначения.
Создание LTI-моделей.
ss
Создает модель пространства состояния.
zpk
Создает модель нули/полюсы/к-ты передачи
tf
Создает модель передаточной функции.
dss
Специфицирует описатель модели пространства состояния
filt
Специфицирует цифровой фильтр.
set
Установка/модификация атрибутов LTI-модели
ltiprops
Детальная справка об атрибутах LTI-моделей
Извлечение данных
ssdata
Извлечение матриц пространства состояния
zpkdata
Извлечение данных о нулях/полюсах/КП
tfdata
Извлечение числителя (-лей) и знаменателя (-лей) ПФ
dssdata
Получение информации о версии описателя SSDATA.
get
Получение информации о значениях свойств LTI-модели.
Получение информации об отдельных характеристиках модели
class
о типе модели ('ss', 'zpk' или 'tf').
size
о размерах матриц входа и выхода.
isempty
Проверка, является ли LTI-модель пустой.
isct
Проверка, является ли модель непрерывной.
isdt
Проверка, является ли модель дискретной.
isproper
Проверка, является ли модель правильной.
issiso
Проверка, имеет ли модель один вход и один выход
isa
Проверка, является ли LTI-модель моделью заданного типа
Преобразование системы
ss
Преобразование в пространство состояния
zpk
Преобразование в нули/полюсы/КП
tf
Преобразование в передаточные функции
c2d
Преобразование из непрерывного времени в дискретное
d2c
Преобразование из дискретного времени в непрерывное
d2d
Переопределение дискретной системы или добавление задержек
217
входных воздействий
«Арифметические» операции
+ и -
Добавление и отнимание LTI-систем (параллельное соединение)
*
Умножение LTI-систем (последовательное соединение).
\
Левое деление sys1\sys2 равносильно inv(sys1)*sys2.
/
Правое деление sys1/sys2 равнозначно sys1*inv(sys2).
'
Перетранспонирование.
.'
Транспонирование карты входа/выхода.
[..]
Горизонтальное/вертикальное объединение LTI-систем
inv
Обращение LTI-системы
Модели динамики
pole, eig
Полюсы системы
tzero
Нули системы
pzmap
Карта нулей-полюсов
dcgain
Коэффициент передачи при нулевой (низкой ) частоте.
norm
Нормы LTI-систем
covar
Ковариация отклика на белый шум
damp
Частота собственных колебаний и демпфирование по полюсам
системы.
esort
Сортировка полюсов непрерывной системы по их
действительным частям
dsort
Сортировка полюсов дискретной системы по их модулям
pade
Аппроксимация Паде задержек по времени
Модели пространства состояния
rss,drss
Генерирование случайных моделей пространства состояния.
ss2ss
Преобразование переменных состояния
canon
Каноническая форма пространства состояния
ctrb, obsv
Матрицы управляемости и наблюдаемости
gram
Определители Грамма управляемости и наблюдаемости
ssbal
Диагональная балансировка матриц пространства состояния
balreal
Балансировка входа выхода на основе определителя Грамма
modred
Редукция состояния модели
minreal
Минимальная реализация и сокращение нулей и полюсов
augstate
Увеличение выхода за счет присоединения состояний.
Отклик во времени
step
Отклик на единичный скачок
impulse
Отклик на единичный импульс
initial
Отклик на заданные начальные условия состояния
lsim
Отклик на произвольные входы
ltiview
Анализ откликов с помощью графического интерфейса.
gensig
Генерирует периодические сигналы для LSIM.
stepfun
Генерирует единичный скачок
Частотный отклик
bode
Диаграмма Боде частотного отклика (АЧХ и ФЧХ)
sigma
Частотный график сингулярных значений.
nyquist
Диаграмма Найквиста
nichols
Диаграмма Николса
ltiview
Анализ откликов с помощью графического интерфейса
evalfr
Расчет частотного отклика на заданной частоте
freqresp
Частотный отклик над сеткой частот
margin
Запасы по фазе и амплитуде
Объединение систем
append
Объединение LTI систем путем объединения входов и выходов
parallel
Обобщенное параллельное соединение (см. также +).
series
Обобщенное последовательное соединение (см. также *)

218
feedback
Обратное соединение двух систем
star
Соединение звездой Редхеффера.
connect
Получение ss модели из описания блок схемы.
Процедуры классической графики
rlocus
Диаграмма Эванса размещения корней
rlocfind
Интерактивное определение звена заданием расположения корней
acker
Размещение полюсов ОМ системы
place
Размещение полюсов MM системы
estim
Создает Оцениватель по заданному КП оценивателя
reg
Создает Регулятор по заданной матрице обратной связи и
коэффициентам оценивателя.
Инструменты проектирования LQG
lqr,dlqr
Линейно-квадратичный (LQ) регулятор обратной связи.
lqry
LQ регулятор с выходным взвешиванием.
lqrd
Дискретный LQ-регулятор для непрерывной системы.
kalman
Фильтр Калмана.
kalmd
Дискретный фильтр Калмана для непрерывной системы
lqgreg
Формирователь LQG регулятора по LQ-коэффициентам и фильтру
Калмана.
Решение матричных уравнений
lyap
Решение непрерывных уравнений Ляпунова
dlyap
Решение дискретных уравнений Ляпунова
care
Решение непрерывных алгебраических уравнений Риккати
dare
Решение дискретных алгебраических уравнений Риккати
Демонстрационные программы
ctrldemo
Введение в Control System Toolbox.
jetdemo
Классическое проектирование САУ углом рыскания.
diskdemo
Цифровое проектирование контроллера привода жесткого диска
milldemo
ОМ и ММ LQG управление прокатного стана
kalmdemo
Проектирование и моделирование фильтра Калмана
Далее процедуры пакета изучаются более подробно.
6.2. Ввод и преобразование моделей
LTI- модели можно создавать в трех видах - SS, TF и ZPK-объектов. Для этого используются соответственно
процедуры-конструкторы
ss, tf и zpk.
Создание LTI-модели рассмотрим на примере модели трехстепенного астатического гироскопа. Уравнения
движения такого гироскопа можно представить в виде:
⎪
⎩
⎪
⎨
⎧
=−
=+
)(
)(
tl
tn
αλβ
βλα
&
&&
&
&&
(6.1)
где n(t) и l(t) - моменты сил, действующие на гироскоп по осям подвеса;
и - углы поворота гироскопа в
пространстве;
- частота собственных (нутационных) колебаний гироскопа.
α
β
λ
Чтобы создать ss-модель, необходимо, прежде всего, привести дифференциальные уравнения движения
динамической системы к стандартному виду типа:
⎪
⎩
⎪
⎨
⎧
⋅+⋅=
⋅+⋅=
uDxCy
uBxA
dt
dx
(6.2)
219
где - вектор входных переменных; - вектор выходных переменных, а - вектор переменных состояния
системы. Из этого следует, что перед формированием ss-модели необходимо:
u
y
x
- определить, какие величины будут задаваться как явные функции времени, т. е. какие величины составят
вектор
входных переменных;
u
- определить, какие величины будут образовывать вектор
выходных переменных (т.е. будут находиться
путем решения системы заданных дифференциальных уравнений);
y
- установить какие величины будут составлять вектор
переменных состояния системы (их число должно
совпадать с порядком системы заданных дифференциальных уравнений);
x
- с помощью введенных переменных состояния привести заданную систему дифференциальных уравнений к
так называемой нормальной форме Коши, т.е. к системе дифференциальных уравнений первого порядка,
разрешенных относительно производных.
Будем полагать моменты сил – «входами» гироскопа, а углы поворота гироскопа
– «выходами». Тогда система
«гироскоп» (будем обозначать ее GYRO) имеет 2 входа (n(t) и l(t)) и 2 выхода (
и ). В качестве
переменных состояния примем выходные переменные и их первые производные по времени:
α
β
βαβα
&
&
====
4321
;;; xxxx
. (6.3)
Тогда уравнения гироскопа в форме Коши приобретут вид:
⎪
⎪
⎩
⎪
⎪
⎨
⎧
+⋅=
+⋅−=
=
=
).(
);(
;
;
34
43
42
31
tlxx
tnxx
xx
xx
λ
λ
&
&
&
&
(6.4)
Теперь нужно образовать матрицы A, B, C и D в соответствии с формой (2) представления системы в
пространстве состояния. В рассматриваемом случае в качестве выходного вектора у примем:
[]
;,
T
y
βα
=
(6.5)
а в качестве входного вектора - вектор моментов сил:
[
T
tltnu )(),(=
]
]
. (6.6)
Полагая
[
T
xxxxx
4321
,,,=
, (6.7)
значения указанных матриц должны быть такими:
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
=
000
000
1000
0100
λ
λ
A
; ; ;
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
10
01
00
00
B
⎥
⎦
⎤
⎢
⎣
⎡
=
0010
0001
C
. (6.8)
⎥
⎦
⎤
⎢
⎣
⎡
=
00
00
D
Введем эти матрицы в командном окне MatLAB, принимая
:
10=
λ
lambda=10;
A=zeros(4,4); A(1,3)=1;A(2,4)=1;A(3,4)= -lambda;A(4,3)=lambda;
A
A =
0 0 1 0
0 0 0 1
0 0 0 -10
0 0 10 0
220
B=zeros(4,2); B(3,1)=1; B(4,2)=1
B =
0 0
0 0
1 0
0 1
C=zeros(2,2); C=[diag([1 1]) C]
C =
1 0 0 0
0 1 0 0
Теперь можно приступить к созданию LTI-объекта по имени GYRO, используя модель в пространстве
состояния:
GYROss=ss(A,B,C,0)
a =
x1 x2 x3 x4
x1 0 0 1 0
x2 0 0 0 1
x3 0 0 0 -10
x4 0 0 10 0
b =
u1 u2
x1 0 0
x2 0 0
x3 1 0
x4 0 1
c =
x1 x2 x3 x4
y1 1 0 0 0
y2 0 1 0 0
d =
u1 u2
y1 0 0
y2 0 0
Continuous-time model.
Как видно, модель сформирована правильно. Можно начать некоторые ее преобразования.
Прежде всего, интересно найти передаточные функции созданной системы. Очевидно, их должно быть 4 (ибо у
нас 2 выхода и 2 входа). Для этого применим процедуру преобразования
tf
:
GYROtf=tf(GYROss)
Transfer function from input 1 to output...
s - 8.882e-016
#1: --------------
s^3 + 100 s
10
#2: -----------
s^3 + 100 s
Transfer function from input 2 to output...
-10
#1: -----------
s^3 + 100 s
s - 8.882e-016
#2: --------------
s^3 + 100 s
Теперь преобразуем введенную ss-модель в zpk-модель при помощи процедуры zpk:
GYROzp=zpk(GYROss)