Лазарев Ю.Ф. Mатематическое моделирование физических процессов и технических систем в MATLAB
Подождите немного. Документ загружается.

451
ветственно
delta10,
delta20
начальные углы отклонения оси собственного вращения гироскопа
от оси
Y
инерциальной системы координат (вокруг осей и
соответственно)
Z X
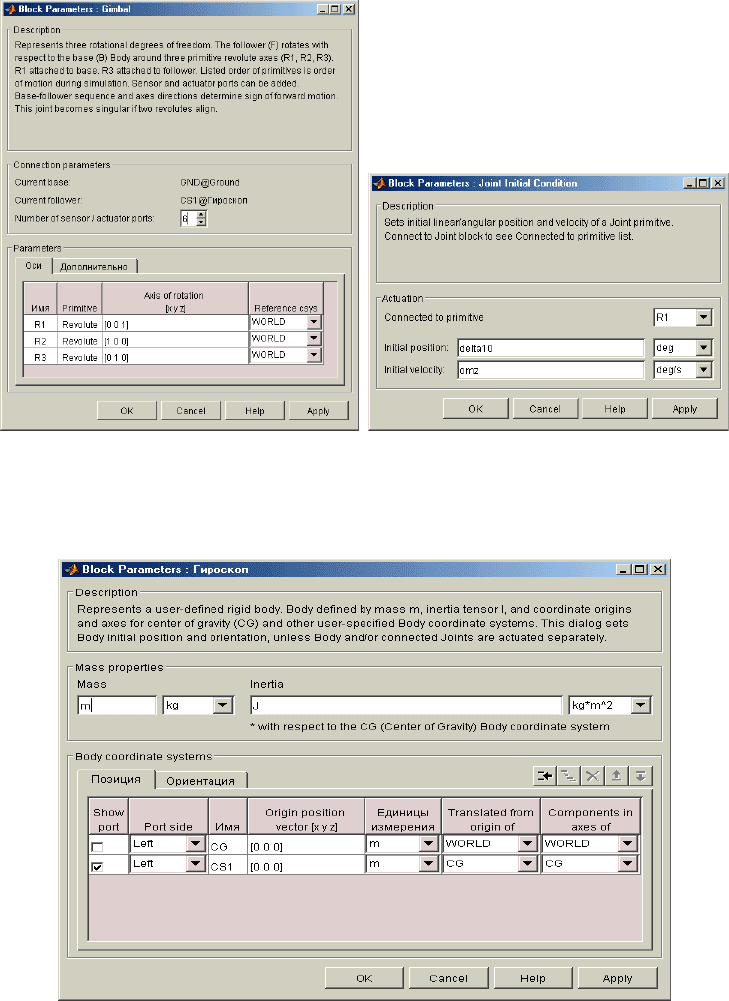
Ниже (рис. 36…39) приведены окна настраивания основных блоков.
Рис. 11.36. Окно настраивания блока Gimbal
Рис. 11. 37. Окно настраивания блока Joint Initial Condition
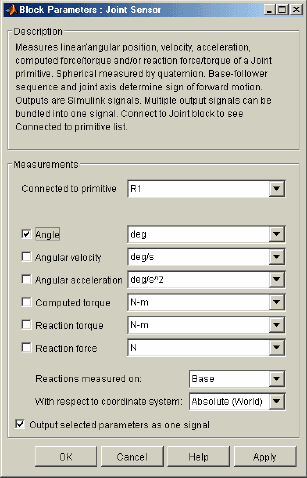
Рис. 11.38. Окно настраивания блока Гироскоп
452
Рис. 11.39. Окно настраивания блока Joint Sensor
Текст управляющей программы
SUG_simMech_upr
, которая осуществляет присвоение значений инерционным
характеристикам гироскопа, ввод начальных условий, запуск на выполнение S-модели и выведены в графиче-
ской форме результатов на экран, приведен ниже.
% SUG_simMech_upr
% Лазарев Ю. Ф. 19-04-2004
clc
clear all
% Установка инерционных характеристик гироскопа
m=1;
J=[3 0 0;0 5 0;0 0 3]; %J=[4 0 0;0 5 0;0 0 3]; %J=[4 -0.2 0.1;-0.2 5 -0.2;0.1 -0.2 3];
% Установка начальных условий
OM=20; omx=1; omz=0; delta10=0; delta20=0;
% Моделирование на модели SimMechanics
sim('SUG_simMech');
% Извлечение данных
t=tout; D1=yout(:,1); D2=yout(:,2);
% Построение графического вывода результатов
subplot(2,2,1)
plot(D1,D2), grid
set(gca,'FontSize',12)
title('Траектория в картинной плоскости');
xlabel('\delta1 (градусы)'), ylabel('\delta2 (градусы)')
subplot(2,2,2)
axis('off');
h=text(-0.3,1.1,'Уравновешенный гироскоп (модель SimMechanics)','FontSize',14);
h=text(0.1,0.9,'| ','FontSize',12);
h=text(0.2,0.9,num2str(J(1,1)),'FontSize',12);
h=text(0.4,0.9,num2str(J(1,2)),'FontSize',12);
h=text(0.6,0.9,num2str(J(1,3)),'FontSize',12);
h=text(0.8,0.9,'| ','FontSize',12); h=text(-0.1,0.8,'J = ','FontSize',12);
h=text(0.1,0.8,'| ','FontSize',12);
h=text(0.2,0.8,num2str(J(2,1)),'FontSize',12);
h=text(0.4,0.8,num2str(J(2,2)),'FontSize',12);
h=text(0.6,0.8,num2str(J(2,3)),'FontSize',12);
h=text(0.8,0.8,'| ','FontSize',12);
h=text(0.1,0.7,'| ','FontSize',12);
h=text(0.2,0.7,num2str(J(3,1)),'FontSize',12);
h=text(0.4,0.7,num2str(J(3,2)),'FontSize',12);
h=text(0.6,0.7,num2str(J(3,3)),'FontSize',12);
453
h=text(0.8,0.7,'| ','FontSize',12);
h=text(-0.1,0.5,'Начальные углы (градусы)','FontSize',12);
h=text(0.1,0.4,['\delta10 = ',num2str(delta10)],'FontSize',12);
h=text(0.4,0.4,['\delta20 = ',num2str(delta20)],'FontSize',12);
h=text(-0.1,0.2,'Начальные угловые скорости (рад/с)','FontSize',12);
h=text(0.1,0.1,['omx0 = ',num2str(omx)],'FontSize',12);
h=text(0.4,0.1,['omy0 = ',num2str(OM)],'FontSize',12);
h=text(0.7,0.1,['omz0 = ',num2str(omz)],'FontSize',12);
h=text(-0.1,-0.05,'---------------------------------------------------------------------------------------------');
h=text(-0.1,-0.1,'Программа SUG-simMech-upr Лазарев Ю. Ф. 19-04-2004');
h=text(-0.1,-0.15,'---------------------------------------------------------------------------------------------');
subplot(2,2,[3,4])
plot(t,D1,t,D2,'.'),set(gca,'FontSize',12)
title('Изменение углов поворота оси гироскопа со временем');
xlabel('Время (сек)'), ylabel('Углы (градусы)')
legend('\delta1','\delta2',0), grid
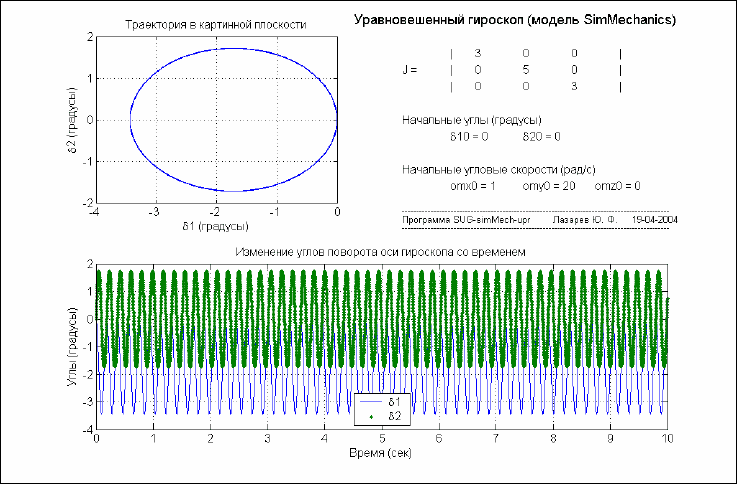
Далее приводятся результаты работы этой программы.
На рис. 40 представлены результаты моделирования для случая, когда гироскоп является динамически симмет-
ричным телом с осью симметрии, совпадающей с осью собственного вращения.
Рис. 11.40. Свободное движение симметричного уравновешенного гироскопа
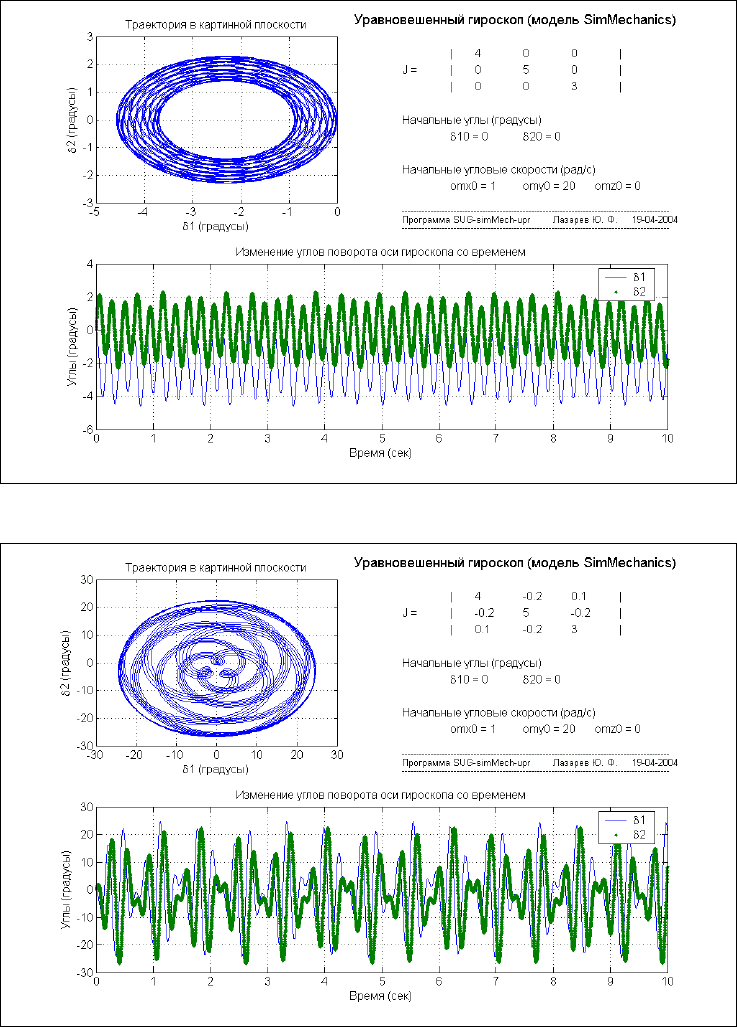
Рис. 41 показывает результаты для случая несимметричного гироскопа. Наконец, на рис. 42 представлено дви-
жение несимметричного и динамически несбалансированного гироскопа.
454
Рис. 11.41. Свободное движение несимметричного уравновешенного гироскопа
Рис. 11.42. Свободное движение несбалансированного гироскопа
Результаты моделирования хорошо согласуются с результатами теоретического анализа [14].
11.3. Модель кривошипно-шатунного механизма
Перейдем к составлению модели кривошипно-шатунного механизма. Он состоит из ведущего звена (поводка,
кривошипа), вращающегося с заданной угловой скоростью вокруг оси
, ведомого звена (шатуна) и ползуна,
перемещающегося поступательно в направляющих, параллельных оси
. Все три тела вместе образуют замк-
нутую механическую цепь.
Z
X
Модель может быть реализована в виде схемы, изображенной на рис.
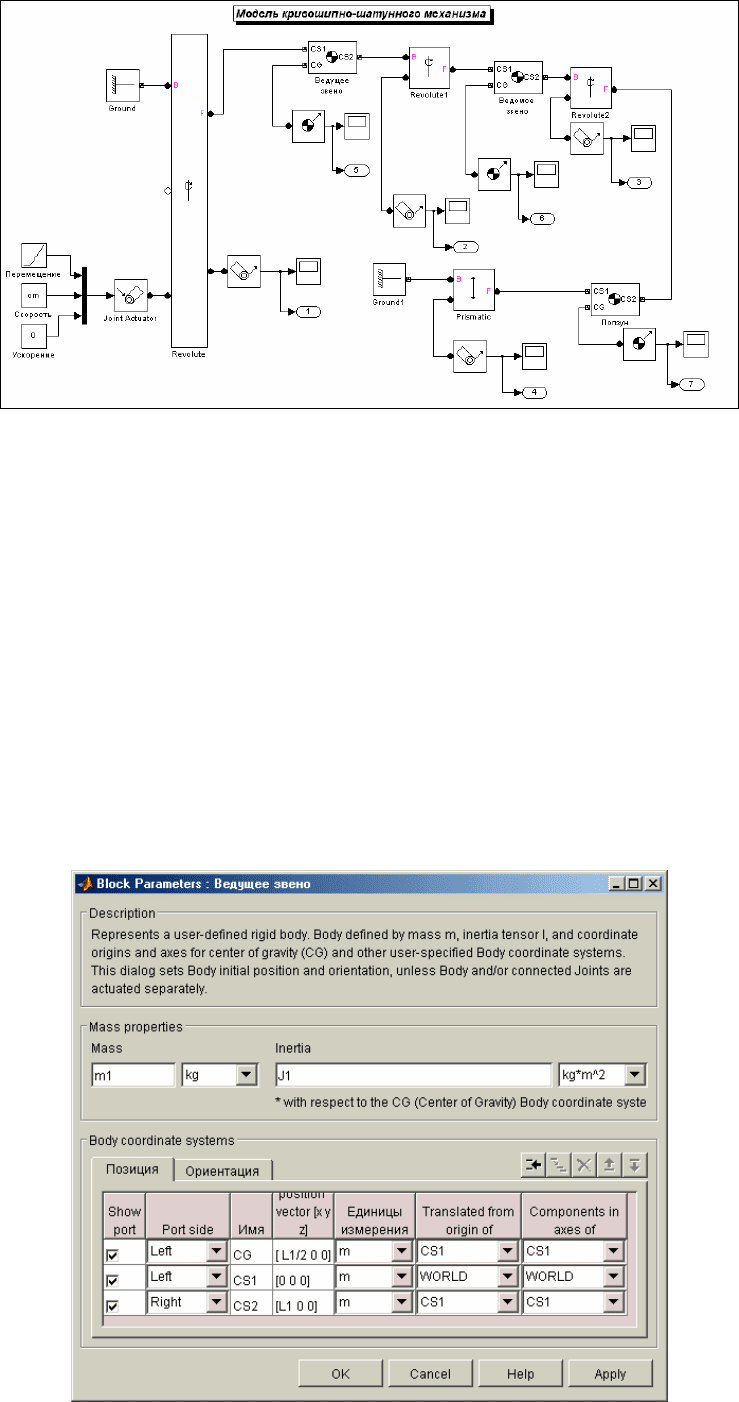
455
Рис. 11.43. Модель
SimMech_KSM1
кривошипно-шатунного механизма
Она состоит из двух блоков типа Ground, двух блоков типа Body (Ведущее звено, Ведомое звено и Ползун),
четырех блоков примитивов сочленений (три блока Revolute и один блок Prismatic), блока Joint Actuator возбу-
дителя вращения ведущего звена, четырех блоков типа Joint Sensor для измерения относительного движения
частей четырех сочленений и трех блоков типа Body Sensor для измерения параметров
движения тел.
В дальнейшем используем следующие обозначения.
M1, M2, M3
Массы ведущего, ведомого звеньев и ползуна соответственно
J1, J2, J3
Матрицы моментов инерции указанных тел относительно их центров масс
L1
Расстояние от оси вращения кривошипа до шарнира, связывающего его с шатуном
L2
Расстояние между двумя шарнирами шатуна (ведомого звена)
om
Угловая скорость вращения кривошипа вокруг оси
Z
fi0
Начальный угол отклонения кривошипа от горизонтальной оси
X
E
Кратчайшее расстояние от оси вращения кривошипа до оси перемещения ползуна
Al
Рассчитываемое начальное значение угла наклона оси шатуна к оси
X
С учетом их установлены параметры настройки блоков тел, показанные на рис. 44…48.
Рис. 11.44. Окно настраивания блока Ведущее звено (вкладка Позиция)
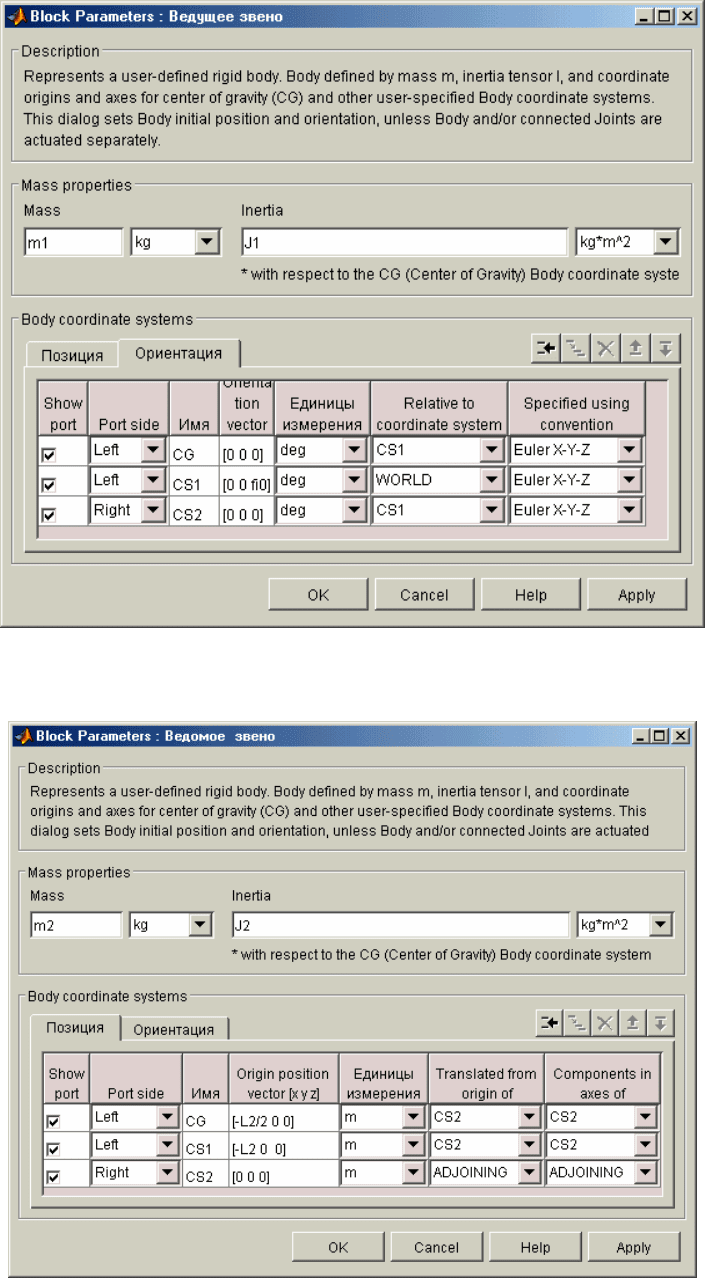
456
Рис. 11.45. Окно настраивания блока Ведущее звено (вкладка Ориентация)
Рис. 11.46. Окно настраивания блока Ведомое звено (вкладка Позиция)
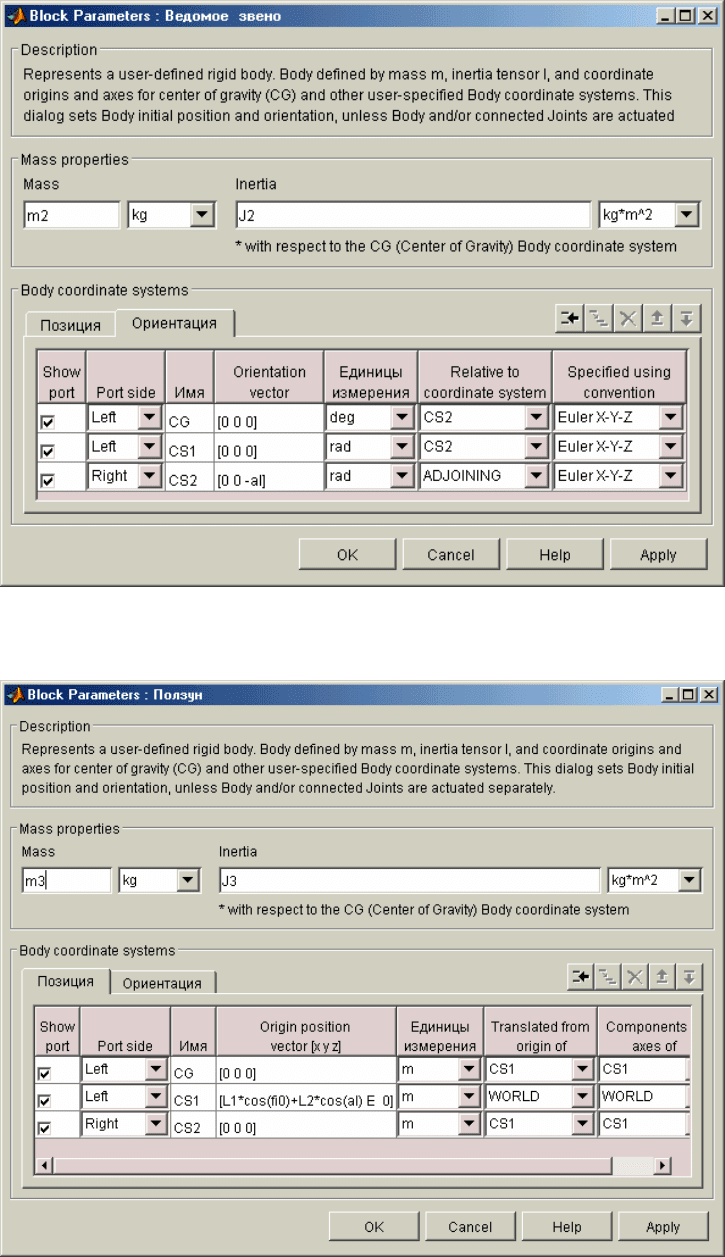
457
Рис. 11.47. Окно настраивания блока Ведомое звено (вкладка Ориентация)
Рис. 11.48. Окно настраивания блока Ползун
Программа
SimMech_KSM1_upr
управления работой этой модели приведена ниже.
% SimMech_KSM1_upr
458
% Лазарев Ю. Ф. 6-05-2004
clear all, clc
% Задание параметров ведyщего звена
m1=1; J1=[1 0 0;0 1 0; 0 0 1]; L1=0.5; fi0=0; om=5;
% Задание параметров ведомого звена
m2=1; J2=[1 0 0;0 1 0; 0 0 1]; L2=1;
% Задание параметров ползуна
m3=1; J3=[1 0 0;0 1 0; 0 0 1]; E=0.1;
% Предварительные расчеты
al=asin((L1*sin(fi0)-E)/L2);
% Моделирование
sim('SimMech_KSM1')
% Получение данных
t=tout;
% 1. С приводного шарнира
Ug1=unwrap(yout(:,1)*pi/180)*180/pi; UgSk1=yout(:,2); UgUsk1=yout(:,3);
Mc1=yout(:,4);
% 2. С ведомого шарнира
Ug2=unwrap(yout(:,5)*pi/180)*180/pi; UgSk2=yout(:,6); UgUsk2=yout(:,7);
Mc2=yout(:,8);
% 3. С шарнира ползуна
Ug3=yout(:,9); UgSk3=yout(:,10); UgUsk3=yout(:,11);
Mc3=yout(:,12);
% 4. С направляющей ползуна
Xp=yout(:,13); Skp=yout(:,14); Uskp=yout(:,15);
% 5. С центра масс ведущего звена
Xz1=yout(:,16); Yz1=yout(:,17); SkXz1=yout(:,19); SkYz1=yout(:,20);
UgSkZ1=yout(:,24); UgUskZ1=yout(:,27);
% 6. С центра масс
ведомого звена
Xz2=yout(:,28); Yz2=yout(:,29); SkXz2=yout(:,31); SkYz2=yout(:,32);
UgSkZ2=yout(:,36); UgUskZ2=yout(:,39);
% 7. С центра масс ползуна
Xz3=yout(:,40); Yz3=yout(:,41); SkXz3=yout(:,43); SkYz3=yout(:,44);
UgSkZ3=yout(:,48); UgUskZ3=yout(:,51);
% Вывод графиков
subplot(2,3,1)
plot(t,Ug1,'o',t,Ug1+Ug2,'.',t,Ug3), grid, title('Углы поворотов шарниров')
xlabel('Время (с)'). ylabel('Градусы')
h=text(0.0,1200,'Кривошипно-шатунный механизм','FontSize',14);
legend('Шарнир1','Шарнир1-2','Шарнир3',0)
subplot(2,3,4)
plot(t,Mc1,'o'), grid, title('Момент сил на ведущем шарнире')
xlabel('Время (с)'), ylabel('Ньютон*м')
subplot(2,3,2)
plot(t,UgSk1,'o',t,UgSk2,'.',t,UgSk3), grid
title('Угловые скорости поворотов шарниров')
xlabel('Время (с)'), ylabel('Градусы в секунду')
legend('Шарнир1','Шарнир2','Шарнир3',0)
subplot(2,3,3)
plot(t,UgSkZ1,'o',t,UgSkZ2,'.',t,UgSkZ3), grid
title('Угловые
ускорения поворотов шарниров')
xlabel('Время (с)'), ylabel('Градусы в секунду^2')
legend('Шарнир1','Шарнир2','Шарнир3',0)
subplot(2,3,5)
plot(t,Xp,'r'), grid, title('Отн. перемещение призматич. сочленения')
xlabel('Время (с)'), ylabel('Метры')
subplot(2,3,6)
plot(t,Skp,'.',t,Uskp), grid, title('Скорость и ускорение ползуна')
xlabel('Время (с)'), ylabel('М/с и м/с^2'), legend('скорость','Ускорение',0)
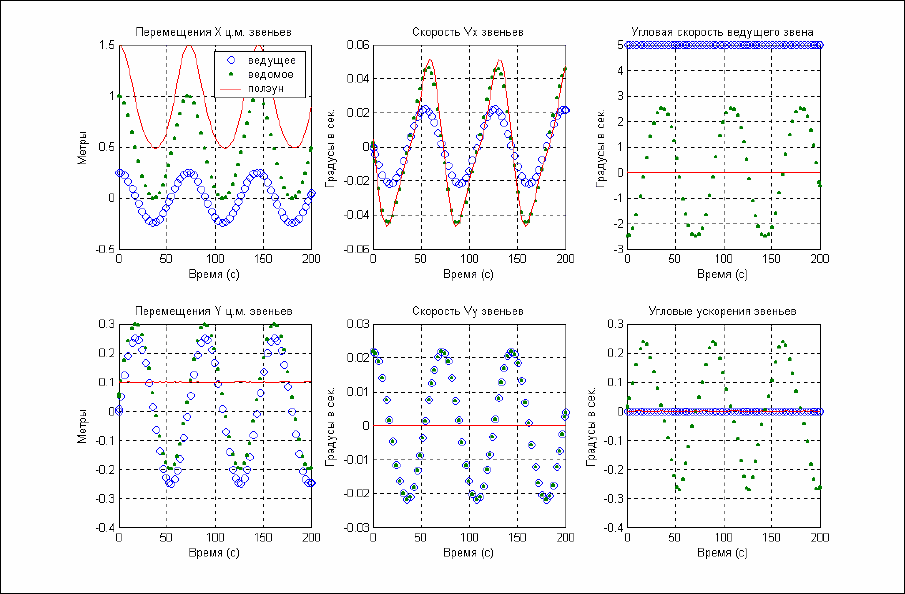
figure
subplot(2,3,1)
plot(t,Xz1,'o',t,Xz2,'.',t,Xz3), grid, title('Перемещения X ц.м. звеньев')
xlabel('Время (с)'), ylabel('Метры'), legend('ведущее','ведомое','ползун',1)
subplot(2,3,3)
plot(t,UgSkZ1,'o',t,UgSkZ2,'.',t,UgSkZ3), grid,
title('Угловая скорость
ведущего звена')
xlabel('Время (с)'), ylabel('Градусы в сек.')
subplot(2,3,4)
459
plot(t,Yz1,'o',t,Yz2,'.',t,Yz3), grid, title('Перемещения Y ц.м. звеньев')
xlabel('Время (с)'), ylabel('Метры')
subplot(2,3,2)
plot(t,SkXz1,'o',t,SkXz2,'.',t,SkXz3), grid, title('Скорость Vx звеньев')
xlabel('Время (с)'), ylabel('Градусы в сек.')
subplot(2,3,5)
plot(t,SkYz1,'o',t,SkYz2,'.',t,SkYz3), grid, title('Скорость Vy звеньев')
xlabel('Время (с)'), ylabel('Градусы в сек.')
subplot(2,3,6)
plot(t,UgUskZ1,'o',t,UgUskZ2,'.',t,UgUskZ3), grid
title('Угловые ускорения звеньев'), xlabel('Время (с)'), ylabel('Градусы в сек.')
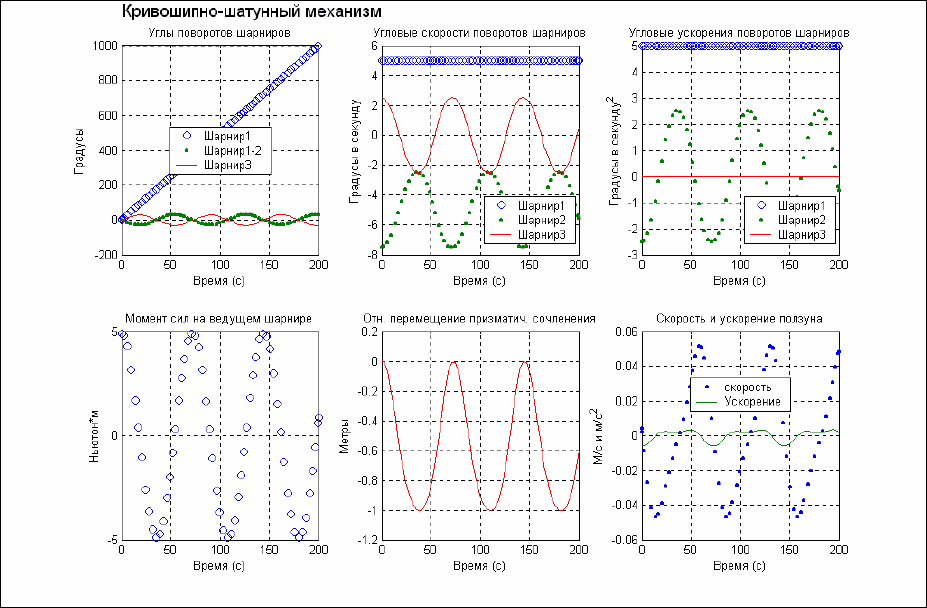
Результаты моделирования по этой программе представлены на рис. 49 и 50.
Как видим, средства библиотеки
SimMechanics
позволяют получить достаточно обширную информацию о
механическом движении тел, как относительном, так и абсолютном, включая реакции в связях между телами.
Последнее обстоятельство особенно важно при проектировании механизмов и машин.
Рис. 11.49. Результаты моделирования по модели
SimMech_KSM1
460
Рис. 11.50. Результаты моделирования кривошипно-шатунного механизма
11.4. Модель движения маятника
Рассмотрим модель движения маятника на поступательно вибрирующем основании, поведение которого было
исследовано ранее другими средствами.
Для начала отметим, что по умолчанию модели библиотеки
SimMechanics
автоматически учитывают дейст-
вие силы тяжести на все звенья механизма. При этом предполагается, что ось
Y
земной (инерциальной) систе-
мы координат направлена вдоль вертикали вверх, а, следовательно, сила тяжести, приложенная в центре масс,
направлена по ней в противоположном направлении (вниз). Оси
и поэтому лежат в плоскости горизон-
та.
Z X
В дальнейшем будем предполагать, что ось вращения маятника направлена вдоль оси
, а колебания маятни-
ка происходят в плоскости
.
Z
YX
Для имитации поступательного движения основания в этой плоскости свяжем (рис. 51) тело маятника (блок
Тело) с инерциальной системой отсчета (блок Основание) через сочленение Planar, которое представляет собой
цепь из трех последовательно соединенных примитивов – P1, P2 и R3.