Li S.Z., Jain A.K. (eds.) Encyclopedia of Biometrics
Подождите немного. Документ загружается.

a multipart standard is under development, covering
several biometric modalities. Such multip art standard
is known as ISO/IEC 19794. There are four parts in this
standard which cover finger-based biometrics , or what
can be better understood as fingerprint biometrics.
1. Part 2 of the Standard series, deals with the way a
minutiae-based feature vector or template has to
be coded
2. Part 3 standardizes the way to code information
referring to the spectral information of the
fingerprint
3. Part 4 determines the coding of a fingerprint raw
image and
4. Part 8 establishes a way to code a fingerprint by its
skeleton
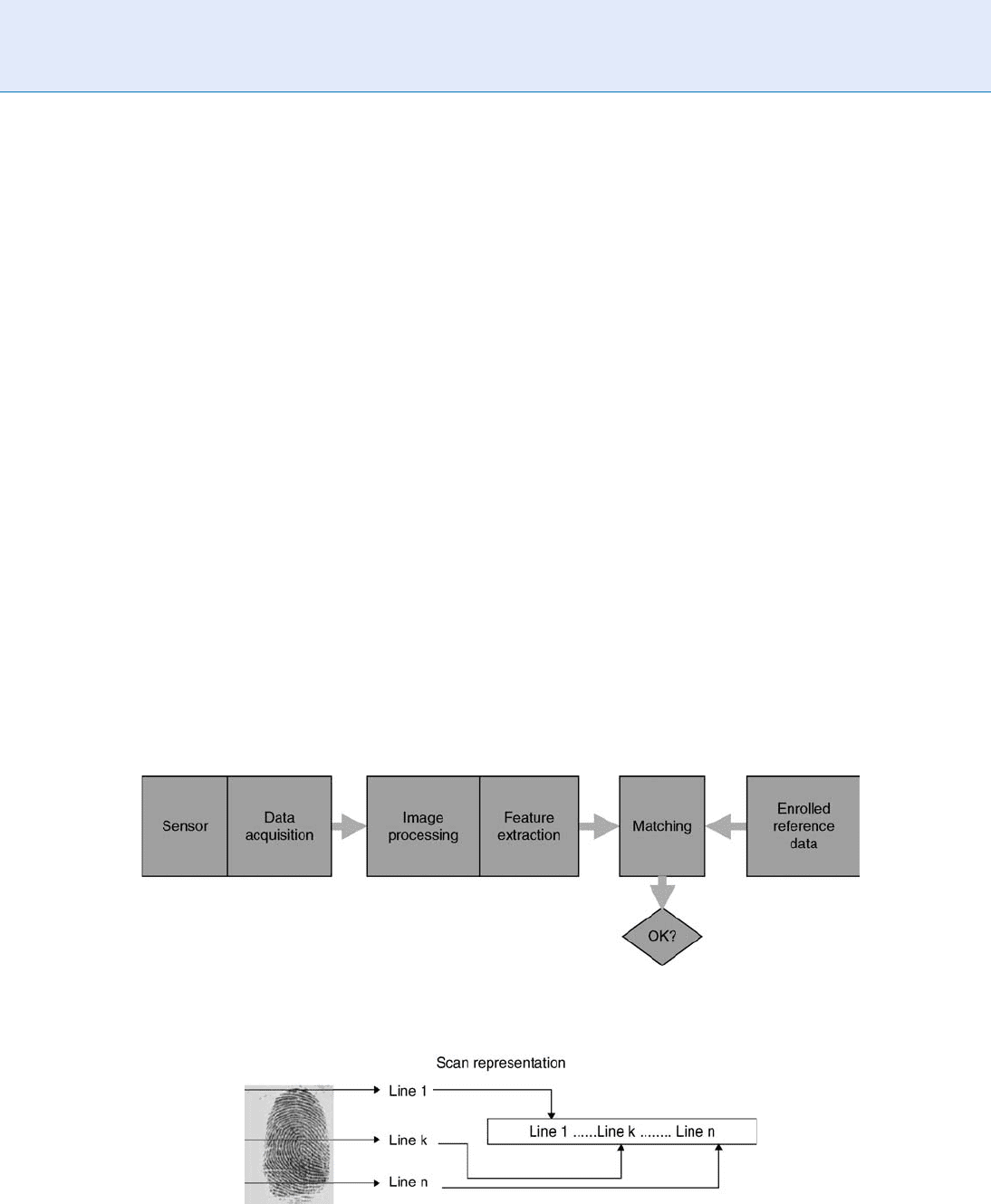
Figure 1 shows the basic architecture of a typical
fingerprint verification system. A finger is presented to
a sensor and a raw image acquired. Image processing
techniques enhance the image quality before a feature
vector of characteristic features can be extracted. The
features are compared with a previously recorded ref-
erence data set to determine the similarit y between the
two sets before the user presenting the finger is authen-
ticated. The reference data is stored in a database or on
a portable data carrier.
The following subsections explain the basic char-
acteristics of each type of finger-based standard. The
image standard (Part 4) is presented first as it is the
first step in the fingerprint comparison process as
shown in the architecture above. This is followed by
the other finger based standards, each of which deals
with samples already processed.
Finger Images
As already mentioned, the way a fingerprint image is
to be coded is defined in ISO/IEC 19794-4 Inter-
national Standard [1], whose title is ‘‘Information
technolog y - Biometric data interchange formats -
Part 4: Finger image data.’’ The way the finger is scanned
is out of the scope of the standard, but after image
acquisition, the image shall represent a finger in upright
position, i.e., vertical and with the tip of the finger in the
upper part of the image. The way to code such an image
is represented in Fig. 2, where the top line is the first to
be stored and/or transmitted. This is in contradiction
to mathematical graphing practice but in conjunction
with typical di gital image processing. For those images
that require two or more bytes per pixel intensity, the
most significant byte is stored/transmitted first, and
bytes follow most significant bit coding.
Finger Data Interchange Format, Standardization. Figure 1 Typical Biometric Verification System.
Finger Data Interchange Format, Standardization. Figure 2 Coding structure of a fingerprint image. Image taken
from [1].
410
F
Finger Data Interchange Format, Standardization
This International Standard also includes a set of
constraints for image acquisition. It determines the
pixel aspect ratio, which shall be between 0.99 and
1.01 (horizontal/vertical sizes), as well as several
image acquisition levels, as stated in Table 1.
After the requirements for the image to be stored
or transmitted have been specified, this International
Standard details the structure of the data record refer-
ring to a finger image. Following CBEFF specifications
[2] (see entry ‘‘Common Biometric Exchange Frame-
work Formats’’), a record referring to a finger image
has the following structure (for detai ls refer to the
last version of this International Standard [1]):
A single fixed-length (32-byte) general record
header containing information about the overall
record, with the following fields:
– Format identifier (4 bytes with the hexadecimal
value 0x46495200) and version number (coded
in another 4 bytes)
– Record length (in byte s) including all finger
images within that record (coded in 6 bytes)
– Capture device ID (2 bytes) and Image acquisi-
tion level (2 bytes)
– Number of fingers (1 byte), Scale units used
(1 byte), and Scan resolution used (2 bytes
for horizontal and another 2 for vertical
resolution)
– Image resolution, coded the same way as the
scan resolution, and whose value shall be less
or equal to scan resolution
– Pixel depth (1 byte) and Image compression
algorithm used (coded in 1 byte)
– 2 bytes reserved for future use
A single finger record for each finger, view, multi-
finger image, or palm consisting of:
– A fixed-length (14-byte) finger header con-
taining information pertaining tothe data for
a single or multi-finger image, which gives
information about:
Length of the finger data block (4 bytes)
Finger/palm position (1 byte)
Count of views (1 byte) and View number
(1 byte)
Finger/palm image quality (1 byte) and Im-
pression type (1 byte)
Number of pixels per horizontal line (2
bytes) and Number of horizontal lines
(2 bytes)
1 byte reserved for future use
– Compressed or uncompressed image data view
for a single, multi-finger, or palm image , which
has to be smaller than 43x10
8
bytes.
The raw finger format is used, for example, in data-
bases containing standard fingerprints. Law enforce-
ment agencies are typical applicants of the standard.
The largest fingerprint image databases are maintained
by the FBI in the United States and are encoded with
a national counterpart of this standard.
Fingerprint Minutiae
While Part 4 of the 19794 Series of Standards is dedi-
cated to raw biometric sample data, Part 2 refers to the
format in which a minutiae-based feature vector or
template has to be coded. Therefore ISO/IEC 19794-2
‘‘Information Technology - Biometric data interchange
Formats - Part 2: Finger minutiae data’’ [3] deals
with processed biometric data, ready to be sent to a
comparison block to obtain a matching score.
Finger minutiae are local point patterns present in
a fingerprint image. The comparison of these charac-
teristic features is sufficient to positively identify a
person. Sir Francis Galton first defined the features of
a fingerprint [4].
In order to reach interoperability, this International
Standard defines not only the record format, but also
the rules for fingerprint minutiae extraction. Regarding
record formats, due to the application of fingerprint
biometrics to systems based on smart cards, compact
record formats are also defined to cope with memory
and transmission speed limitations of such devices.
Finger Data Interchange Format, Standardization.
Table 1 Image acquisition levels for finger biometrics.
Extract from Table 1 in [1 ]
Setting
level
Scan resolution
(dpi)
Pixel depth
(bits)
Gray
levels
10 125 1 2
20 250 3 5
30 500 8 80
31 500 8 200
35 750 8 100
40 1,000 8 120
41 1,000 8 200
Finger Data Interchange Format, Standardization
F
411
F
Fingerprint scientists have defined more than 150
different types of minutiae [5]. Within this Standard,
minutiae types are simplified to the following: (1) ridge
ending, (2) ridge bifurcation, and (3) other. The location
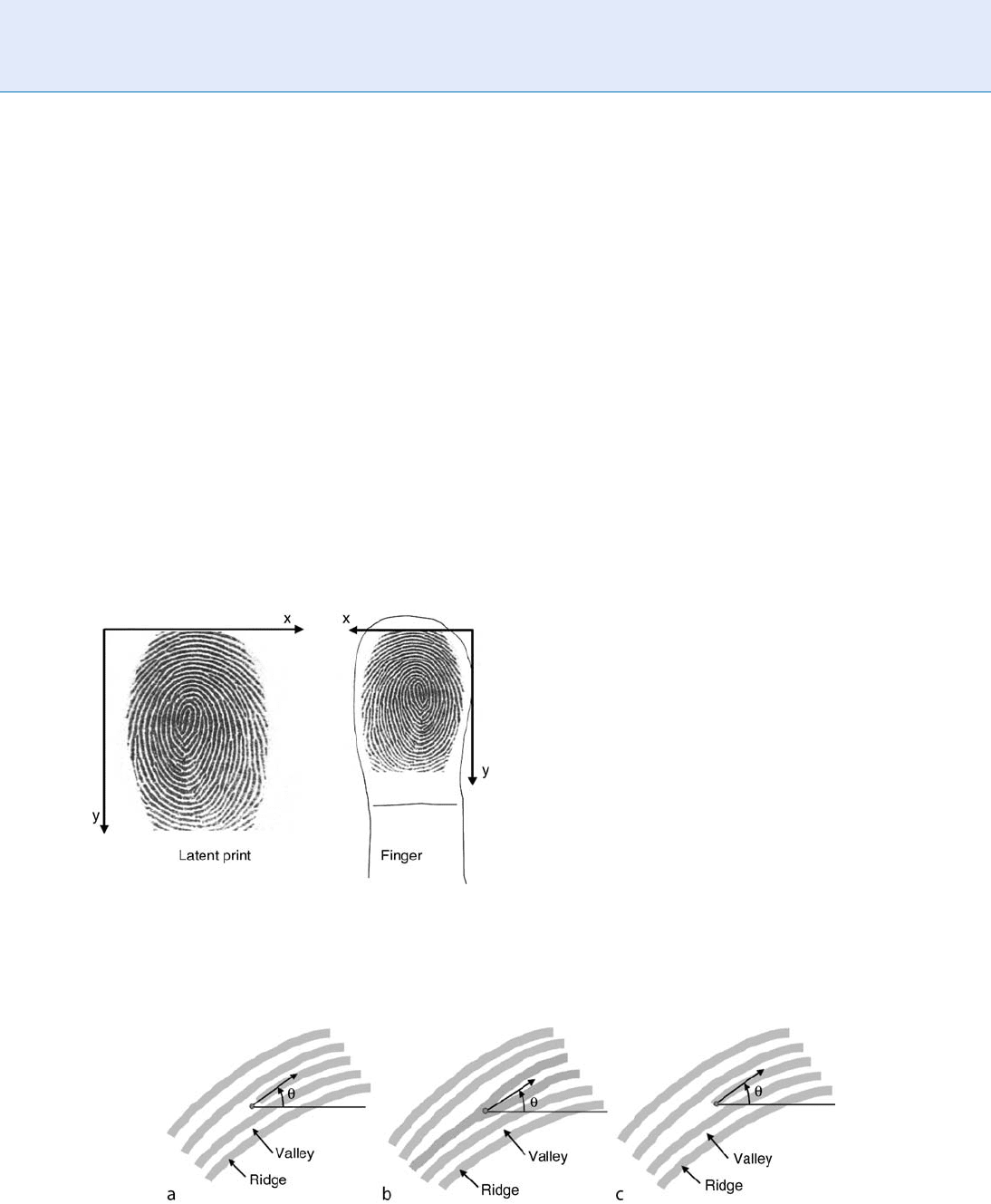
of each minutiae is determined by its horizontal and
vertical position within the image. To determine such
location a coor dinate system is to be defined. Figure 3
shows how such coordinate system is chosen. Granular-
ity to be taken to determine location is of one hun-
dredth of a millimetre for the normal format, while just
one tenth of a millimetre for card compact formats.
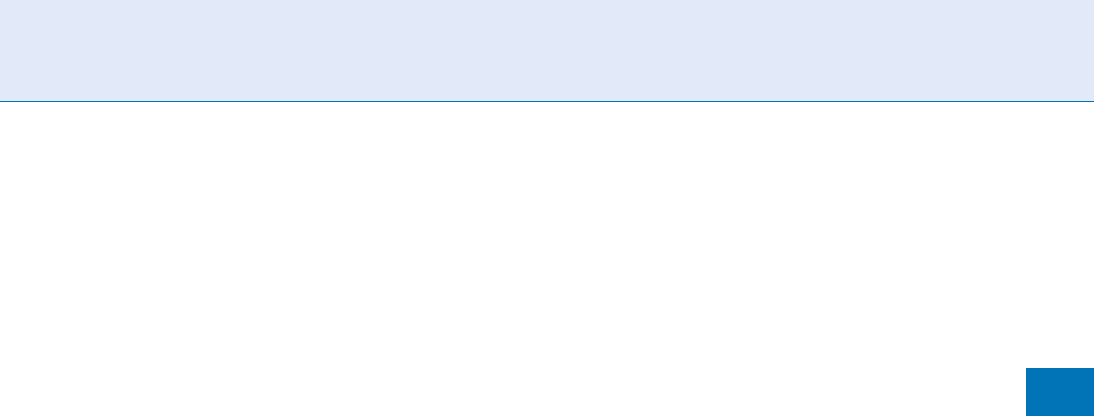
Figure 4 shows the different ways to consider
the location of a minutiae. (1) represents a Ridge
Ending, encoded as a Valley Skeleton Bifurcation
Point, (2) shows how to locate a Ridge Bifurcation,
encoded as a Ridge Skeleton Bifurcation Point, Finally
(3) illustrat es how to locate a Ridge Ending encoded as
a Ridge Skeleton Endpoint. How to determine the
encoding of ridge ending actually used in a specific
dataset is a subject currently under revision in the stan-
dard. The other types of minutia have to be coded
consistent with the Standards (see details in [3]).
To define the minutiae direction, its angle has to be
determined. This Standards specifies that the angle is
obtained, increasing counter-clockwise rotation start-
ing from the horizontal axis to the right of the loca-
tion of the minutiae point. The angle is encoded in
a unsigned single byte, so the granularity is 1.40625
∘
per bit (360∕256). Figure 4 also illustrates how the
angle is determined.
Additional information that may be included in
a minutiae-based record are cores, deltas, and ridge
crossings to neighboring minutiae.
With all these definitions, the two major format
types defined by this International Standard are:
(1) record format, and (2) card format. The structure
of the record format is summarized in the following
paragraphs and for additional details refer to the
standard [3].
A fixed-length (24-byte) record header containing
information about the overallrecord, including
the number of fingers represented and the overall
record length in bytes:
– Format identifier (4 bytes with the hexadecimal
value 0x464D5200) and Version number (coded
in another 4 bytes)
– Record length (in bytes) including all finger
images w ithin that record (coded in 4 bytes)
– Capture device ID (2 bytes)
– Size of the image in pixels (2 byte s for X dimen-
sion, and 2 bytes for Y dimension)
– Image resolution in pixels per centimetre
(2 bytes for X and 2 bytes for Y)
– Number of finger views included in the record
– 1 byte reser ved for future use
Finger Data Interchange Format, Standardization. Figure 4 Illustration of location of minutia. Image taken from [3].
Finger Data Interchange Format, Standardization.
Figure 3 Coordinate System for Minutiae Location. Image
taken from [3].
412
F
Finger Data Interchange Format, Standardization
A Single Finger record for each finger/view, con-
sisting of:
– A fixed-length (4-byte) header containing in-
formation about the data for asingle finger,
including the number of minutiae:
Finger position (1 byte)
View number (4 bits) and Impression type
(4 bits, to make a 1 byte in total)
Finger quality (1 byte)
Number of minutia (1 byte)
– A series of fixed-length(6-byte) minutia
descriptions:
Minutia type (2 bits) and X location in
pixels (14 bits)
2 bits reserved and Y location in pixels
(14 bits)
Minutiae angle (1 byte)
Quality of minutiae (1 byte)
– One or more ‘‘extended’’ data areas for each
finger/view , containing optional or vendor-
specific information. It starts always with 2 bytes
which determine the length of Extended Data
Block. If this is 0x0000, no Extended Data is
included. If it has a nonnull value, then it
is followed by vendor-specific data which could
include information about ridge count, cores
and deltas, or cell information.
Regarding the card formats, the current version of
the standard allows 2 sub-formats: (1) normal format
(also referred as 5-byte minutiae), and (2) compact
format (also known as 3-byte minutiae). The way mi-
nutia are coded in each format is described below.
Card normal format (like the record format, but
removing quality information):
– Minutia type (2 bits) and X location in pixels
(14 bits)
– 2 bits reserved and Y location in pixels (14 bits)
– Minutiae angle (1 byte)
Card compact format:
– X coordinate (8 bits) considering a unit of
10
1
mm
– Y coordinate (8 bits) considering a unit of
10
1
mm
– Minutia type (2 bits) using the sam e coding as
with the card normal format
– Angle (6 bits) having a granularity of 360∕64
Another important aspect related to card formats is
that as they are intended to be used with devices with
limited memory and processing power, the number of
minutia may be restricted, and in such case, truncation
is needed. Additionally in Match-on-Card systems, to
reduce algorithm complexity, minutia may need to be
sorted in a certain way. And finally, the way data is
exchanged differs from the traditional CBEFF format.
This International Standard covers all such cases. The
reader is suggested to refer to the last version of the
Standard [ 3] for further details.
The minutia standard is used e.g., by the ILO (In-
ternational Labour Organization) in its seafearers
identity card and in several national ID card imple-
mentations including Thailand and Spain [6].
Spectral Data of a Fingerprint
Part 3 of the 19794 series of standards deals with a
format suitable to process fingerprints when using
morphological approaches. But as seen in additional
Fingerprint entries in this Encyclopedia, there are
other approaches to perform biometric identification
using fingerprints. Some of those approaches relate to
the spectral information of the fingerprint. Algorithms
using spectral data look at the global structure of a
finger image rather than certain local point patterns.
In such cases, 19794-2 is of no use and the only possi-
bility would be to use the w hole image as stated in
19794-4, which has the inconvenience of requiring
the storage and/or transmission of a large amount of
data. This could be inconvenient if not blocking for
some application s.
In order to provide a new data format that could
increase interoperability among spectral based solu-
tions, reducing the amount of data to be used,
19794-3 has been developed under the title of ‘‘Infor-
mation technology - Biometr ic data interchange
formats - Part 3: Finger pattern spectral data’’ [7]. In
fact, this International Standard deals with three major
approaches in spe ctral based biometrics (wavelet based
approaches are not supported by this standard).
1. Quantized co-sinusoidal triplets
2. Discrete Fourier transform
3. Gabor filters
After declaring the basic requirements for the origi-
nal image in order to be considered for these algorithms
(same coordinate system as in 19794-2, 255 levels of
grey with 0 representing black and 255 being white, and
Finger Data Interchange Format, Standardization
F
413
F

dark colours corresponding to ridges while light pixels
corresponding to valleys), and describing all the above
mentioned technologies, the Standards focuses on the
record structure (for details refer to [7]), which is:
A variable-length record header containing infor-
mation about the overall record, including:
– Format identifier (4 bytes with the hexadecimal
value 0x46535000) and Version number (coded
in another 4 bytes)
– Record length (in bytes) including all fingers
within that record (coded in 4 bytes)
– Number of finger records included (1 byte)
– Image resolution in pixels per centimetre (2 bytes
for X direction and 2 bytes for Y direction)
– Number of cells (2 bytes for X direction and
2 bytes for Y direction)
– Number of pixels in cells (2 bytes for X direc-
tion and 2 bytes for Y direction)
– Number of pixels between cells centres (2 bytes
for X direction and 2 bytes for Y direction)
– SCSM (Spectral component selection method -
1 byte), which can be 0, 1, or 2. Depending on
the value of this field the following fields could
refer to type of window, standard deviation,
number of frequencies, frequencies, number of
orientations and spectral components per cell,
and bit-depths (propagation angle, wavelength,
phase, and/or magnitude)
– Bit-depth of quality score (1 byte)
– Cell quality group granularity (1 byte)
– 2 bytes reserved for future use
A single finger record for each finger, consisting of:
– A fixed-length (6-byte) header containing in-
formation about the data for asingle finger:
Finger location ( 1 byte)
Impression type (1 byte)
Number of views in single finger record (1 byte)
Finger pattern quality (1 byte)
Length of finger pattern spectral data block
(2 bytes)
– A finger pattern spectral data block:
View number (1 byte)
Finger pattern spectral data
Cell quality data
– An extended data block containing vendor-
specific data, composed of block length
(2 bytes), area type code (2 bytes), area length,
and area.
As in 19794-2, this International Standard also
defines the Data Objects to be included for a card
format, with the reduction in granularity recom-
mended (for further details see [7 ]).
Some of the leading fingerprint verification algo-
rithms rely on spectral data or a combination of spec-
tral data and minutiae. This standard could enhance
the interoperability and performance of large scale
identification systems such as criminal or civil Auto-
matic Fingerprint Identification Systems (AFIS).
Skeletal Data of a Fingerprint
Finally 19794-8 titled ‘‘Information technology -
Biometric data interchange formats - Part 8: Finger pat-
tern skeletal data’’ [8] deals with the format for represent-
ing fingerprint images by a skeleton with ridges
represented by a sequence of lines. Skeletonization is a
standard procedure in image processing and generates a
single pixel wide skeleton of a binary image. Moreo v er the
start and endpoints of the skeleton ridge lines are includ-
ed as real or virtual minutiae, and the line from start to
endpoint is encoded by succ essive direction changes.
For minutiae location and coding, much of the
19794-2 card format is used, but here the position of
a ridge bifurcation minutiae shall be defined as the
point of forking of the skeleton of the ridge. In other
words, the point where three or more ridges intersect
is the location of the minutia. No valley representation
is accepted under this International Standard. Anothe r
difference w ith 19794-2 card formats , is that in this
Standard no other-type minutiae is considered (if a
minutiae has more than three arms, like a trifurcation,
it is considered a bifurcation), and that along this
standard codes for ‘‘virtual minutiae’’ are used.
Skeleton lines are coded as polygons. Every line
starts with a minutiae, and it is followed by a chain
of direction changes (coded with the granularit y stated
in the record header), until it reaches the final minu-
tiae. Several rules are defi ned in the standard (see [8]
for further reference).
All that information is coded in a record with the
following structure (limiting values as well as recom-
mended values can be found in [8]):
A fixed-length (24-byte) record header containing:
– Format identifier (4 bytes with the hexadecimal
value 0x46534B00) and Version number (coded
in another 4 bytes)
414
F
Finger Data Interchange Format, Standardization
– Record length (in bytes) including all finger
images w ithin that record (coded in 4 bytes)
– Capture device ID (2 bytes)
– Number of finger views in record (1 byte)
– Resolution of finger pattern in pixels per centi-
metre (1 byte)
– Bit depth of direction code start and stop point
coordinates (1 byte)
– Bit depth of direction code start and stop direc-
tion (1 byte)
– Bit depth of direction in direction code (1 byte)
– Step size of direction code (1 byte)
– Relative perpendicular step size (1 byte)
– Number of di rections on 180
∘
(1 byte)
– 2 bytes reserved for future use
A single finger record for each finger/view, consis-
ting of:
– A fixed-length (10 bytes) head er:
View number (1 byte)
Finger position (1 byte)
Impression type (1 byte)
Finger quality (1 byte)
Skeleton image size in pixels (2 bytes for
X-direction, 2 bytes for Y-direction)
Length of finger pattern skeletal data block
(2 bytes)
– The variable length fingerprint pattern skeletal
description:
Length of finger pattern skeletal data
(2 bytes)
Finger pattern skeletal data
Length of skeleton line neighbourhood
index data (2 bytes)
Skeleton line neighbourhood index data
– An extended data block containing the ex-
tended data block length and zero or more
extended data areas for each finger/view, defin-
ing length (2 bytes), area type code (2 bytes),
area length (2 bytes), and data.
This International Standard also defines two card
formats, a normal one and a compact one . As with
other parts, this means more limiting constraints to
code data tighter and the definition of the Data Objects
needed (for details refer to [8]).
The skeleton format is used in scienti fic research
[9] and by vendors, implementing Match-on-Card.
Further Steps
The fingerprint parts of ISO 19794 were published as
International Standards in 2005 and 2006. All the par ts
are currently under revision. A major task in the revi-
sion process is to address some defects and include a
common header format for all the parts. Some refer-
ences and vocabulary are needed to be updated to
harmonize the relation of these standards within the
ISO standardization landscape. The finger minutia
standard ISO 19794-2 is probably the most prominent
format in this series and is most frequently used by
industry, government, and science. Interoperability
tests have shown that the current standard allows
some room for interpretation. This will be compen-
sated by an amendment to describe the location, ori-
entation, and type in more detail. Another aspect in
the current revision of the standard is to reduce the
number of format types from currently ten to a maxi-
mum of two. Experts from all continents and various
backgrounds meet on a regular basis to lay down the
future of the standards. The delegates take care of
current requirements in terms of technology and
applications.
Summary
To provide interoperability in storing and transmitting
finger-related biometric information, four standards
are already developed to define the formats needed
for raw images, minutia-based feature vectors, spectral
information, and skeletal representation of a finger-
print. Beyond that, other standards deal with confor-
mance and quality control, as well as interfaces or
performance evaluation and reporting (see related
entries below for further information).
Related Entries
▶ Biometric Data Interchange Format
▶ Common Biometric Exchange Framework Formats
▶ Conformance Testing for Biome tric Data Inter-
change Formats, Standardization of
▶ Fingerprint Recognition
▶ International Standardization of Biome trics
Finger Data Interchange Format, Standardization
F
415
F
References
1. ISO/IEC: 19794-4:2005 - information technology - biometric
data interchange formats - part 4: Finger image data (2005)
2. ISO/IEC: 19785-1:2005 - information technology - common
biometric exchange formats framework - part 1: Data element
specification (2005)
3. ISO/IEC: 19794-2:2005 - information technology - biometric
data interchange formats - part 2: Finger minutiae data (2005)
4. Galton, F.: Finger Prints. Macmillan, London (Reprint: Da Capo,
New York, 1965) (1892)
5. Moenssens, A.: Fingerprint Techniques. Chilton Book Company,
London (1971)
6. Spanish-Homeland-Ministry: Spanish national electronic
identity card information portal (in spanish). http://www.dnie
lectronico.es/ (2007)
7. ISO/IEC: 19794-3:2006 - information technology - biometric
data interchange formats - part 3: Finger pattern spectral data
(2006)
8. ISO/IEC: 19794-8:2006 - information technology - biometric data
interchange formats - part 8: Finger pattern skeletal data (2006)
9. Robert Mueller, U.M.: Decision level fusion in standardized
fingerprint match-on-card. In: 1-4244-0342-1/06, ICARCV
2006, Hanoi, Vietnam (2006)
Finger Geometry, 3D
SOT IRIS MALASSIOTIS
Informatics and Telematics Institute, Center for
Research and Technolog y Hellas, Thessaloniki, Greece
Synonym
3D hand biometrics
Definition
Biometrics based on 3D finger geometry exploit discrim-
inatory information provided by the 3D structure of the
hand, and more specifically the fingers, as captured by
a3Dsensor.Theadvantagesofcurrent3Dfinger
biometrics over traditional 2D hand geometry authenti-
cation techniques are improved accuracy, the ability to
work in contact free mode, and the ability to combine
with 3D face recognition using the same sensor.
Introduction
The motivation behind 3D finger geometry biometrics
is the same as with 3D face recognition. The 3D geom-
etry of the hand as captured by a 3D sensor offers
additional discriminatory information while being in-
variant to variations such as illumination or pigment
of the skin, compared with an image captured with a
plain 2D camera. The current accuracy and resolution
of 3D sensors are not adequate for capturing fine
details on the surface of the fingers such as skin wrin-
kles over the knuckles, but is sufficient to measure,
local curvature, finger circumference, or finger length.
Another motivation comes from a limitation of
current hand geometry recognition systems, that is
obtrusiveness. The user is required to put hi s/her
hand on a special platter with knobs or pegs that
constrain the placement of the hand on the platter.
This step greatly facilitates the process of feature ex-
traction by guaranteeing a uniform background and
hand posture. Thus it guarantees very good perfor-
mance. However, several users would find touching of
the platter unhygienic, while others would face diffi-
culty correctly placing their hands (for example chil-
dren or older people with arthritis problems). Since 3D
data can facilitate the detection of the hand and fin-
gers, even in a cluttered scene, the above constraint
may be raised and the biometric system becomes more
user friendly.
Since the placement of the hand is not a constraint,
one may then combine 3D finger geometry with 3D
face using the same 3D sensor. The user either places
his/her hand on the side of the face or in front of the
face. In the first case, face and hand biometric features
are extracted in parallel, whi le in the second case se-
quentially and the scores obtained are finally com-
bined. This combination has demonstrated ver y high
accuracy even under difficult conditions.
State-of-the-Art
3D hand geometry biometrics is a very recent research
topic and therefore, only a few results are currently
available.
The first to investigate 3D geometry of the fingers
as a biometric modality were Woodard and Flynn [1].
416
F
Finger Geometry, 3D
They used a 3D laser scanner to capture range images
and associated color images of the back of the hand. The
users were instructed to place their palm flat against a
wall with uniform color and remove any rings. For each
subject out of 132, four images were captured in two
recording sessions one week apart. An additional session
was also performed a few months later with 86 of the
original subjects and 89 new subjects.
The authors used the color images to perform
segmentation of the hand from the background.
A combination of skin-color detection and edge detec-
tion was used. The resulting hand segmentation is used
to extract the hand silhouette from which the bound-
aries of index, middle, and ring fingers are detected.
Then for each detected finger a mask is constructed
and an associated normalized (with respect to pose)
range image is created.
For each valid pixel of the finger mask in the output
image, a
▶ surface curvature estimate is computed
with the corresponding range data. The principal cur-
vatures are estimated first by locally fitting a bicubic
Monge patch on the range data to deal with the noise
in the data. However, the number of pixels in the
neighborhood of each point that are used to fit the
patch has to be carefully selected, otherwise fine detail
on the surface may be lost. The principal curvatures are
subsequently used to compute a shape index, which is
a single measure of curvature.
The similarity between two finger surfaces may be
computed by estimating the normalized correlation
coefficient among the associated shape index images.
The average of the similarity scores obtained by the
three fingers demonstrated the best results when used
for classification.
Recognition experiments demonstrat ed an 95%
accuracy, falling to 85% in the case that probe and
gallery images are recorded more than one week apart.
This performance was similar with that reported by a
2D face recognition experiment. The authors managed
to cope with this decline in performance due to time
lapse by matching multiple probe images with multiple
gallery images of the same subject. Similarly, the equal
error rate obtained in verification experiments, is about
9% when a single probe image is matched against a
single gallery image and falls to 5.5% when multiple
probe and gallery images are matched.
The above results validated the assumption that 3D
finger geometry offers discriminato ry information and
may provide an alternative to 2D hand geometry
recognition. However it remains unclear how such an
approach will fair against a 2D hand geometry based
system, given the hig h cost of 3D sensor.
‘‘The main advantage of a biometric sy stem based
on 3D finger geometry is its ability to work in an
unobtrusive (contact-free) manner [2].’’ They propose
a biometric authentication scenario where the user
freely places his hand in front of his face with the
back of the hand visible from the 3D sensor. Although
the palm should be open with the finge rs extended,
small finger bending and moder ate rotation of the
hand plane with respect to the camera are allowed as
well as wearing of rings.
The acquisition of range images and quasi-
synchronous color images are achieved using a real-
time 3D sensor, which is based on the structured light
approach. Thus, data are more noisy and contain more
artifacts compared with those obtained with high-end
laser scanners. Using this setup, the authors acquired
several images of 73 subjects in two recording sessions.
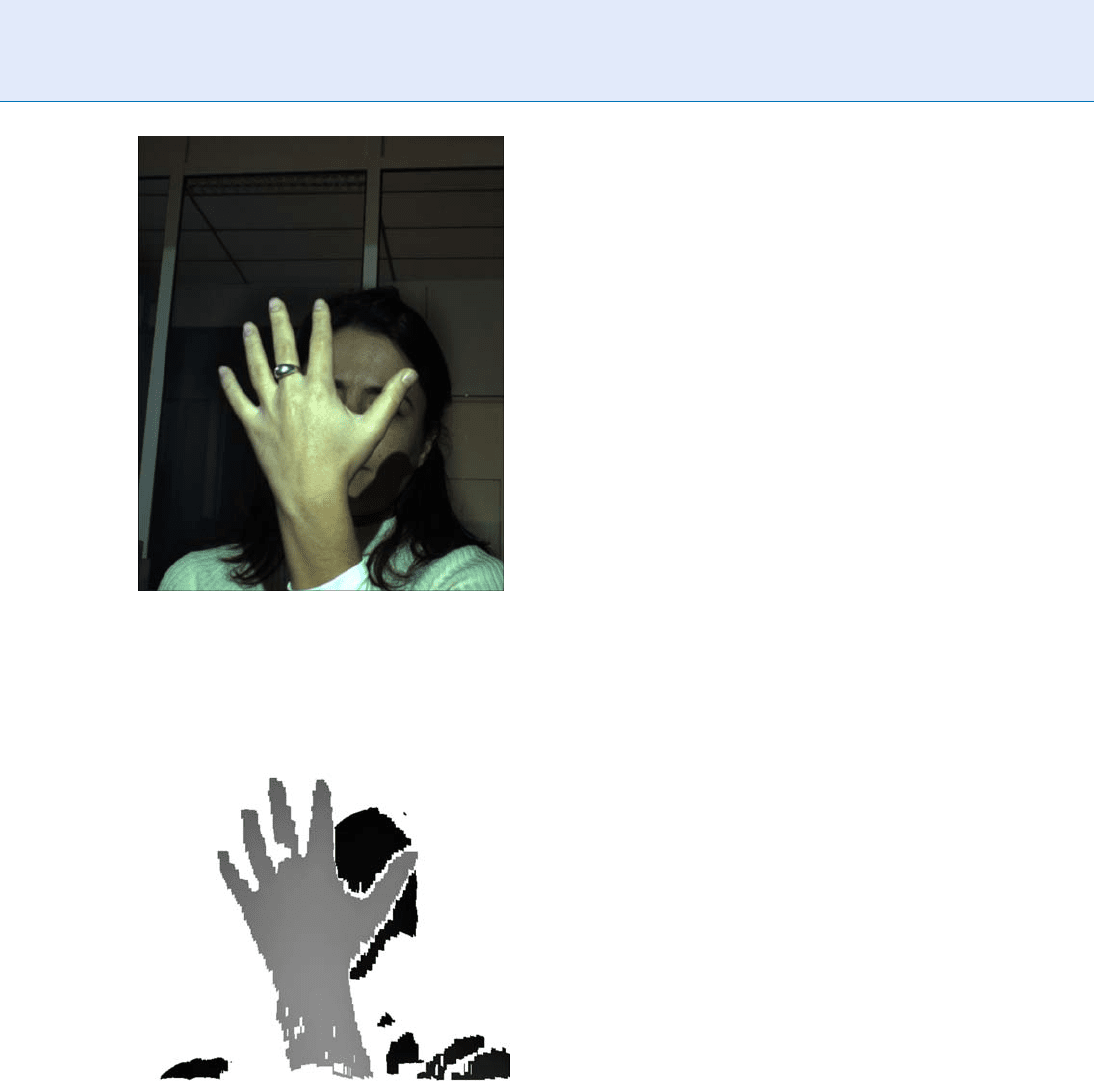
For each subject, images depicting several variations in
the geometry of the hand were captured. These includ-
ed, bending of the fingers, rotation of the hand, and
presence or absence of rings (see fig. 1).
The proposed algorithm starts by segmenting the
hand from the face and torso using thresholding and
subsequently from the arm using an iterative clustering
technique. Then, the approximate center of the palm
and the orientation of the hand is detected from the
hand segmentation mask. These are used to locate the
fingers. Homocentric circular arcs are drawn around the
center of the palm with increasing radius excluding the
lower part of the circle that corresponds to the wrist.
Intersection of these arcs with the hand mask gives raise
to candidates of finger segments, which are then clus-
tered to form finger bounding polygons. This approach
avoids using the hand silhouette, which is usually noisy
and may contain discontinuities, e.g., in the presence of
rings. The initial polygon delineating each finger is
refined by exploiting the associated color image edges.
Then, for each finger two signature functions are
defined, parameterized by the 3D distance from the
finger tip computed along the ridge of each finger and
measuring cross-sectional features. Computing fea-
tures along cross-sections offers quasi- invariance to
bending. The first function corresponds to the width of
the finger in 3D, while the second corresponds to the
mean curvature of the curve that is defined by the 3D
points corresponding to the cross-section at the specific
Finger Geometry, 3D
F
417
F
point. Twelve samples are uniformly computed from
each signature function and each finger giving rise to
96 measurements (the thumb was excluded) that are
used for classification. Matching between hand geom-
etry of probe and gallery images is estimated as the L
1
distance between the associated measurement vectors.
Experimental results are similar with those re-
ported in [1]. Rank-1 identification rates range from
86 to 98% depending on using a single or multiple
probe images of the same subject respectively. Cor-
responding equal error rates are 5.8 and 3.5%. The
benefit of the approach in [2 ] is that the algorithm can
withstand moderate variations in hand geometry thus
allowing for contact free operation.
Malassiotis et. al [2] conclude that given the cur-
rent results biometric systems that exploit 3D hand
geometry would be more suitable in low securit y appli-
cations such as personalization of services and atten-
dance control where user-friendliness is prioritized
over accuracy. However, there is another possible ap-
plication in systems combining several biometrics. In
particular, the combination of 3D face modality with
3D finger geometry was shown to offer both high
accuracy and also be relatively unobtrusive.
Woodard et al. [3] compared the recognition per-
formance of 3D face, 3D ear, and 3D finger surface as
well as their combination. The original 93% obtained
using 3D face geometry was improved to 97% when
this was combined with the other two modalities.
Tsalakanidou et al. [4] also combined 2Dþ3D face
recognition with 3D finger geometry recognition, in
the presence of several variations in shape and appear-
ance of the face and hand. According to their applica-
tion scenario, the 3D sensor grabs first images of the
user’s face and then the user is asked to place his hand
in front of his face and another set of images is acquired.
Thescoresobtainedusingfacialandhandfeaturesre-
spectively are normalized and fused to provide a single
score on which identification/verification is based. An
Equal Error Rate equal to 0.82% and a rank-1 identifi-
cation rate equal to 100% was reported for a test-set
comprised of 17,285 pairs of face and hand images of
50 subjects depicting significant variations.
The above results validate our original claim that
3D face geometry + 3D finger geom etry may provide
both high accuracy and user acceptance whi le sharing
the same sensor for data acquisition.
Challenges and Prospects
Biometric authentication/identification using 3D fin-
ger geometry is a very recent addition in the compen-
dium of 3D bio metrics. Although the potential of this
technique has been already demonstrated, several re-
search challenges have to be addressed before commer-
cial applications using this modality emerge.
Finger Geometry, 3D. Figure 1 (a) Color and (b) range
image in the hand geometry acquisition setup of [2].
418
F
Finger Geometry, 3D
Performance of techniques based on 3D finger ge-
ometry depends much more on the quality of range data
than 3D face recognition. Although, some of the fine
detail on the finger surface may be captured using high-
end (and therefore very expensive) 3D scanners, this is
not the case with low-cost systems. Such detail (e.g. the
wrinkles of the skin) may be alternatively detected if
associated brightness images are used. In this case, 3D
information may be used to facilitate the localization of
the finger and knuckles and 2D images may be subse-
quently used to extract the skin folding patterns. Also,
both studies in the literature do not use the thumb
finger, which however, seems to exhibit larger variability
from subject to subject than the rest of the fingers.
Further research is also needed to address the pro-
blem of the variability in the shape and appear ance
depicted on the hand images. Future techniques
should be able to deal w ith significant finger bending,
partial finger occlusion, and rotation of the hand with
respect to the camera and also be generic enough to
cope with diffe rent hand sizes and deformed finger due
to accident or aging.
In summary, 3D finger biometrics retain the bene-
fits of traditional 2D hand geometry biometrics espe-
cially w ith respect to privacy preservation, while
demonstrating similar or better performance. In addi-
tion, 3D finger biometrics may be applied with less
strict constraints on the placement of the hand and the
environment, which makes them suitable for a larger
range of low to medium security applications.
Since correlation of finger geometry features with
other discriminative features of the human body is
known to be very low, 3D finger geometry may be
efficiently combined with other biometrics in a multi-
modal system. In this case, this technolog y may be
applied to high security scenarios.
Related Entries
▶ 3D-Based Face Recognition
▶ Hand Geometry
References
1. Woodard, D.L., Flynn, P.J.: Finger surface as a biometric identi-
fier. Comput. Vision Image Understand 100, 357–384 (2005)
2. Malassiotis, S., Aifanti, N., Strintzis, M.G.: Personal Authentica-
tion Using 3-D Finger Geometry. IEEE Trans. Inform. Forens.
Secur. 1(1), 12–21 (2006)
3. Woodard, D.L., Faltemier, T.C., Yan, P., Flynn, P.J., Bowyer, K.W.:
A Comparison of 3D Biometric Modalities. In: Proc. Comput.
Vision Pattern Recogn. Workshop, pp. 57–60 (2006)
4. Tsalakanidou, F., Malassiotis, S., Strintzis, M.G.: A 3D Face and
Hand Biometric System for Robust User-Friendly Authentica-
tion. Pattern Recogn. Lett. 28(16), 2238–2249 (2007)
Finger Pattern Spectral Data
Set of spectral components derived from a fingerprint
image that may be processed (e.g., by cropping and/o r
down-sampling).
▶ Finger Data Interchange Format, Standardization
Finger Vein
HIS AO OGATA MITSUTOSHI HIMAGA
Hitachi-Omron Terminal Solutions, Corp.
Owari-asahi City, Aich i, Japan
Definition
Finger veins are hidden under the skin where red blood
cells are flowing. In biometrics, the term vein does not
entirely correspond to the terminology of medical sci-
ence. Its network patterns are used for authenticating
the identity of a person, in which the approximately
0.3–1.0 mm thick vein is visible by
▶ near infrared
rays. In this definition, the term finger includes not
only index, midd le, ring, and little fingers, but also the
thumb.
Introduction
Blood vessels are not exposed and their network pat-
terns are normally impossible to see with out the
range of visible light wavelength. The approximately
0.3–1.0 mm vein which constitutes the network pat-
terns are visualized by near infrared rays. Figure 1
shows a visualized finger vein pattern image. It is well
known that hemoglobin absorbs near infrared rays
more than other substances that comprise the human
Finger Vein
F
419
F