Li S.Z., Jain A.K. (eds.) Encyclopedia of Biometrics
Подождите немного. Документ загружается.


Human detection algorithms can also be differen-
tiated based on whether or not they utilize motion
cues. Humans have movement patterns that are dis-
tinct from other object classes, and some algorithms
exploit motion features such as periodicity and motion
symmetry to detect humans in video [7]. While
motion provides a very powerful cue to detect humans,
it is important for human detection algorithms to
utilize both appearance and motion features in a bal-
anced manner, so as to detect people irrespective of
whether they are moving or stationary [2, 4, 8].
Typically human detection algorithms aim at
providing only the location and scale of the people in
the scene. More recently there has been a growing
emphasis on additionally recovering the silhouette
shape of each detected person. Such algorithms typi-
cally require training images in which the silhouettes
are manually annotated in each image [9], though
there are other algorithms that require either only
very limited or no manual annotation of the training
dataset [8]. Since humans have articulated limbs, can
occur in different poses, and may carry objects (e.g.,
briefcase, backpack, etc.), acquiring the actual silhou-
ette shape can provide valuable cues for gait and activ-
ity recognition systems.
Human Tracking
Tracking is the process of temporally associating the
location of the target object (e.g., human) from one
frame to the next in a sequence of images (v ideo).
A detailed survey on object tracking can be found in
[10]. Human tr acking is of considerable interest to
security applications, and the tracking information is
useful for determining the orig in, pathway, and desti-
nation of each person (Fig. 2). As most human track-
ing approaches employ standard (generic) object
tracking algorithms, an overview of these techniques
is presented here.
Most tracking algorithms can be broadly classified
into two categories: (1) data association and filtering
techniques or (2) target representation and localization
methods. The first category is a class of solutions
characterized by associating a set of detection locations
from the previous image to a set of detections in the
current image. The second category is distinguis hed
by building a target model of the appearance of
the object in the initial frame and searching for the
object location in successive frames by generating can-
didate models and finding the best possible target-
candidate match. The tracking task is complicated by
Human Detection and Tracking. Figure 2 Trajectories of tracked people.
710
H
Human Detection and Tracking
changes in illumination, image noise, nonrigid target
motion, and occlusion. For practical applications,
algorithms from both categories may be combined to
obtain robust and efficient trackers.
Data Association and Filtering
Tracking techniques based on association assume that
there is a set of detection locations in an image at time
t and a set at time tþ1. The goal of these trackers is to
find a mapping from the set at time t to the subsequent
set at time tþ1, establishing detection correspondence
between the frames. The simplest solution is to map
the set at time t to its successor according to Euclidean
distance. A more complex approach may incorporate
the velocity of each detection into the computation,
assuming both positional proximity and smooth con-
tinuity in the movement [11]. These data association
techniques use simple assumptions and minimize
some criteri a according to kinematic features extracted
from the video sequence. Naturally occlusion is a sig-
nificant challenge with these techniques, as the map-
ping is more difficult to recover when the cardinalities
of the two sets are not equal (i.e. , missing data).
Filtering strategies improve upon the basic data
association approach by supplying a specific model of
object motion and algorithms by which one can re-
cover the optimal sequence of locations of the object
throughout the video. These strategies generally follow
a predict and update framework, where the new posi-
tion and velocity of the object at time tþ1 is hypothe-
sized/predicted by the model from time t, and then the
model is updated after the frame at time tþ1 is pro-
cessed. These me thods tend to smooth the trajectories
(removing noise) and improve the robustness to oc-
clusion (as new object locations are hypothesized even
when data are not present).
One of the simplest and most common of these
filtering approaches is the Kalman filter [12]. The
Kalman filter is a state-space model that makes
assumptions that the position and velocity at time
tþ1 is a linear function of the position and velocity
of the object at time t plus some additive Gaussian
noise and that the posterior distribution of the hidden
state variable is Gaussian. These assumptions allow the
model to recover the optimal positions and velocities
from the data locations (assuming the object motion
obeys the model assumptions). Unfortunately
trajectories of human motion can at times be nonline-
ar, and in such cases the Kalman filter framework is
likely to fail. Extended Kalman filters have been pro-
posed to relieve the linear model assumption by taking
the first-order approximation of a non-linear process
and casting the problem in a similar predict-update
framework [13].
Particle filtering is a general filtering strategy
that relieves the previous Gaussian assumption, allow-
ing the posteri or distribution to be generic. This is
achieved by representing the posterior distribution
as a set of weighted points (particles) in the state
space. This representation is predicted at time tþ1
by sampling an importance density function (which
approximates the posterior) at time t. It is then updated
at each frame by changing the weight of each sample,
thus allowing the modes of the density to propagate
by assimilating new observations. This type of filter-
ing was populari zed by [14], where par ticle filters
were employed to track objects through cluttered
scenes.
The drawback to most of these algorithms is that in
most cases the models do not incorporate appearance
information into the system, relying strictly on kinematic
data (position and velocity of the detections). How-
ever, there are many examples where a tracker that
could take advantage of appearance information
would significantly increase the tracking performance,
for instance when tracking a person wearing a red shirt
walking in front of a white wall. The next category of
trackers addresses this type of tracking.
Target Representation and Localization
Target representation and localization tracking frame-
works initially extract an appearance model of the
target object from the first image, and then search a
series of candidate locations in the next image to find
the best matching candidate. Unlike the data associa-
tion and filtering methods, this category of tracking
algorithms is mostly a bottom-up process, and essen-
tially performs detection in each frame. The algorithms
must be able to handle appearance changes of the
target over time as it is being tracked.
Popular features used for target representation incl-
ude color histograms, image gradients, and covariance
matrices (of features) within an image patch contain-
ing the target object. Localization techniques varying
Human Detection and Tracking
H
711
H

from global exhaustive search to local heuristic opti-
mizations have been employed to search for the target
locations in subsequent image frames. Many localiza-
tion algorithms benefit from exploiting a spatio-
temporal locality constraint, which assumes that the
location of the object from one frame to the next
changes gradually. This constraint helps reduce the
target search space and can thus result in faster, real-
time tracking algorithms.
Mean shift, a nonparametric density gradient esti-
mator [15], is a common method used to track objects
by finding the mode (peak) of the similarity surface
generated by comparing the object appearance model
(e.g., color histogram) w ith the target candidates. Sim-
ilarity is evaluated as the Bhattacharyya coefficient
between the model and candidate distributions. This
algorithm performs a local optimization on the search
surface starting from the previously known object lo-
cation and is well known for its computational effi-
ciency (real-time frame rates can be obtained). Robust
tracking results are obtained under variable environ-
mental (illu mination, occlusions), object (articulate,
nonlinear motion), and camera (static, moving, jitter)
configurations.
The use of covariance features for the target repre-
sentation was proposed by [3]. The covariance matrix
of features (e.g., position, intensity, color, gradients)
extracted from an image patch enables a compact
representation of both the spatial and the statistical
properties of the object. The tracker performs a search
in the image by comparing the given covariance model
with the covariance matrix at each possible location
using an appropriately defined distance metric. The
location which is most similar to the target model is
assigned to be the new target position in the image.
Summary
Human detection algorithms detect the presence of
people in imagery and must accommodate all of the
appearance variations while not selecting non‐human
entities. Human tracking temporally associates the
human detections within video sequences to generate
trajectories, and is complicated by short- and long-
term occlusions. By providing information regarding
the location and movement of humans in the scene,
human detection and tracking algorithms enable
applications such as remote biometrics and video
surveillance.
Related Entries
▶ Image Pattern Recognition
References
1. Oren, M., Papageorgiou, C., Sinha, P., Osuma, E., Poggio, T.:
Pedestrian detection using wavelet templates. In: Proceedings of
Computer Vision and Pattern Recognition (1997)
2. Dalal, N., Triggs, B., Schmid, C.: Human detection using orien-
ted histograms of flow and appearance. In: Proceedings of
European Conference on Computer Vision (2006)
3. Tuzel, O., Porikli, F., Meer, P.: Human detection via classification
on riemannian manifolds. In: Proceedings of Computer Vision
and Pattern Recognition (2007)
4. Viola, P., Jones, M., Snow, D.: Detecting pedestrians using
patterns of motion and appearance. In: Proceedings of
International Conference Computer Vision (2003)
5. Wu, Y., Yu, T.: A field model for human detection and
tracking. IEEE Trans. Patt. Analy. and Mach. Intell. 28(5),
753–765 (2006)
6. Ramanan, D., Forsyth, D., Zisserman, A.: Strike a pose: Tracking
people by finding stylized poses. In: Proceedings of Computer
Vision and Pattern Recognition (2005)
7. Lee, S., Liu, Y., Collins, R.: Shape variation-based frieze pattern
for robust gait recognition. In: Proceedings of Computer Vision
and Pattern Recognition (2007)
8. Sharma, V., Davis, J.: Integrating appearance and motion cues
for simultaneous detection and segmentation of pedestrians. In:
Proceedings of International Conference Computer Vision (2007)
9. Leibe, B., Seemann, E., Schiele, B.: Pedestrian detection in
crowded scenes. In: Proceedings of Computer Vision and Pat-
tern Recognition (2005)
10. Yilmaz, A., Javed, O., Shah, M.: Object tracking: A survey. ACM
Comput. Surv. 38(4) (2006)
11. Rangarajan, K., Shah, M.: Establishing motion correspondence.
Comp. Vis. Graph. Img. Proc. 54(1), 56–73 (1991)
12. Kalman, R.: A new approach to linear filtering and prediction
problems. Trans. ASME-J. Basic Eng. 82, 35–45 (1960)
13. Julier, S., Uhlmann, J.: A new extension to the kalman filter
to nonlinear systems. In: SPIE AeroSense Symposium (1997)
14. Isard, M., Blake, A.: Condensation – conditional density
propagation for visual tracking. Int. J. Comp. Vis. 29(1),
5–28 (1998)
15. Comaniciu, D., Ramesh, V., Meer, P.: Kernel-based object
tracking. IEEE Trans. Patt. Analy. and Mach. Intell. 25(5),
564–577 (2003)
Human Factors
▶ Ergonomic Design for Biometric Systems
712
H
Human Factors
Human Movement, Psychology
Synonyms
Action Categorization; Action Understanding
Definition
The psychology of human movement is a broad rang-
ing field that includes both how the motor control
system produces movements, and how the sensory
system perceives these movements itself and from
others. Since both the structure of the body and the
strategy for producing movements are unique they
provide constraints that are potentially important for
the sensory interpretation of movement. Applied areas
of study in the psychology of human movement in-
clude sports psychology and social psychology, partic-
ularly when it applies to nonverbal communication
interpretation of visual information from movements
such as gait is of particular interest for biometrics.
In the do main of visual perception, the psychology
of human movement perception is becoming an
increasingly important example of how the visual sys-
tem processes a complex signal changing over time and
attaches meaning and social significance to this signal.
▶ Psychology of Gait and Action Recognition
Human-Biometric Sensor Interaction
(HBSI)
▶ Ergonomic Design for Biometric Systems
Human–Computer Interaction (HCI)
and User Interfaces
Human–Computer interaction is the command and
information flow that streams between the user and
the computer. It is usually characterized in terms of
speed, reliability, consistency, portability, naturalness,
and users’ subjective satisfaction. Human–computer in-
terface (or simply ‘‘user interface’’) is a software applica-
tion, a system that realizes human–computer interaction.
▶ Biometric System Ergonomic Design
▶ Facial Expression Recognition
Human-Interpretable Fingerprint
Classes
Fingerprints are grouped based on some visua l char-
acteristics of fingerprint images determined by human
experts. Such groups are called human-interpretable
fingerprint classes. An excellent example of human-
interpretable fingerprint classes is the well-known
Galton–Henry classification scheme proposed by Sir
Francis Galton and Edward Henry. The five most com-
mon Galton–Henry classes are called arch, tented arch,
left loop, right loop, and whorl, which are easy to be
understood even by ordinary people.
▶ Fingerprint Classification
Hypothesis Test
Hypothesis testing refers to the process of using statis-
tical analysis to determine if the observed differences
between two or more samples are due to random
chance (as stated in the background hypothesis) or
true differences in the samples (as stated in the target
hypothesis).
▶ Universal Background Models
Hypothesis Test
H
713
H

I
ICP Algorithm
Iterative Closest Point (ICP) algorithm developed by
Besl and Mckay, is a well-known method to align 3D
shapes. However ICP requires that ever y point in one
set have a corresponding point on the other set. This
cannot be guaranteed in practice. As a result modified
ICP algorithms exist in the literature.
▶ Ear Biometrics, 3D
ID Photograph
▶ Photography for Face Image Data
Identification
Biometric identification is a process that ranks the
biometric references in the enrolment database in
order of decreasing similarit y against a recognition
biometric sample and then makes a decision, based
on the similarity scores, about the identity w.r.t. to
the references.
▶ Verifica tion/Identification/Authentication/Recogni-
tion: The Terminology
Identity Level in the Speech Signal
Speech production is an extremely complex process,
whose result depends on many variables at different
levels, including sociolinguistic factors (e.g., level of
education, linguistic context, and dialectal differences)
and morphological issues (e.g., vocal tract length
and shape or the dynamic configuration of the articu-
latory organs). These multiple influences will be
simultaneously present in each speech act and some
or all of them w ill contain specificities of the speaker.
Hence, it is needed to clarify and clearly distinguish
the different levels and sources of speaker infor-
mation that should be extracted to model speaker
individualities.
▶ Speaker Features
Identity Theft Reduction
▶ Fraud Reduction, Overview
Illumination
Ambient light sources may affect the appearance of a
biometric image (such as face, fingerprint, or iris). The
intensity and direction of these light sources can im-
pact the performance of image-based biometric recog-
nition algorithms.
▶ Biometrics, Overv iew
▶ Face Recognition, Near-Infrared
▶ Face Tracking
▶ Illumination Compensation
▶ Photography for Face Image Data
#
2009 Springer Science+Business Media, LLC
Illumination Compensation
XUDONG XIE
1
,KIN-MAN LAM
2
,QIONGHAI DAI
1
1
Automation Department, Tsinghua University,
Beijing, China
2
Department of Electronic and Information
Engineering, The Hong Kong Polytechnic University,
Hong Kong, China
Synonyms
Lighting compensation; Illumination normalization
Definition
Due to difficulty in controlling the lighting conditions
in practical applications, variable illumination is one
of the most challenging tasks in face recognition. Prior
to face recognition, illumination compensation has to
be performed, whereby the uneven illumination of
human faces is compensated and face images in normal
lighting conditions are reconstructed. The recon-
structed face images are then used for classification.
An illumination compensation scheme includes the
following modules: lighting category evaluation, shape
normalization, and lighting compensation.
Introduction
Human face recognition, one of the most successful
applications of image analysis and understanding, has
received significant attention in the last decade. Howev-
er, due to difficulty in controlling the lighting conditions
in practical applications, variable illumination is one of
the most daunting challenges in face recognition. As
stated by Adini et al. [1], ‘‘The variations between the
images of the same face due to illumination and view-
ing direction are almost always larger than image var-
iations due to change in face identity’’. Most of the
available methods for face recognition, such as the
Principal Component Analysis (PCA) [2], and the In-
dependent Component Analysis (ICA) [3], encounter
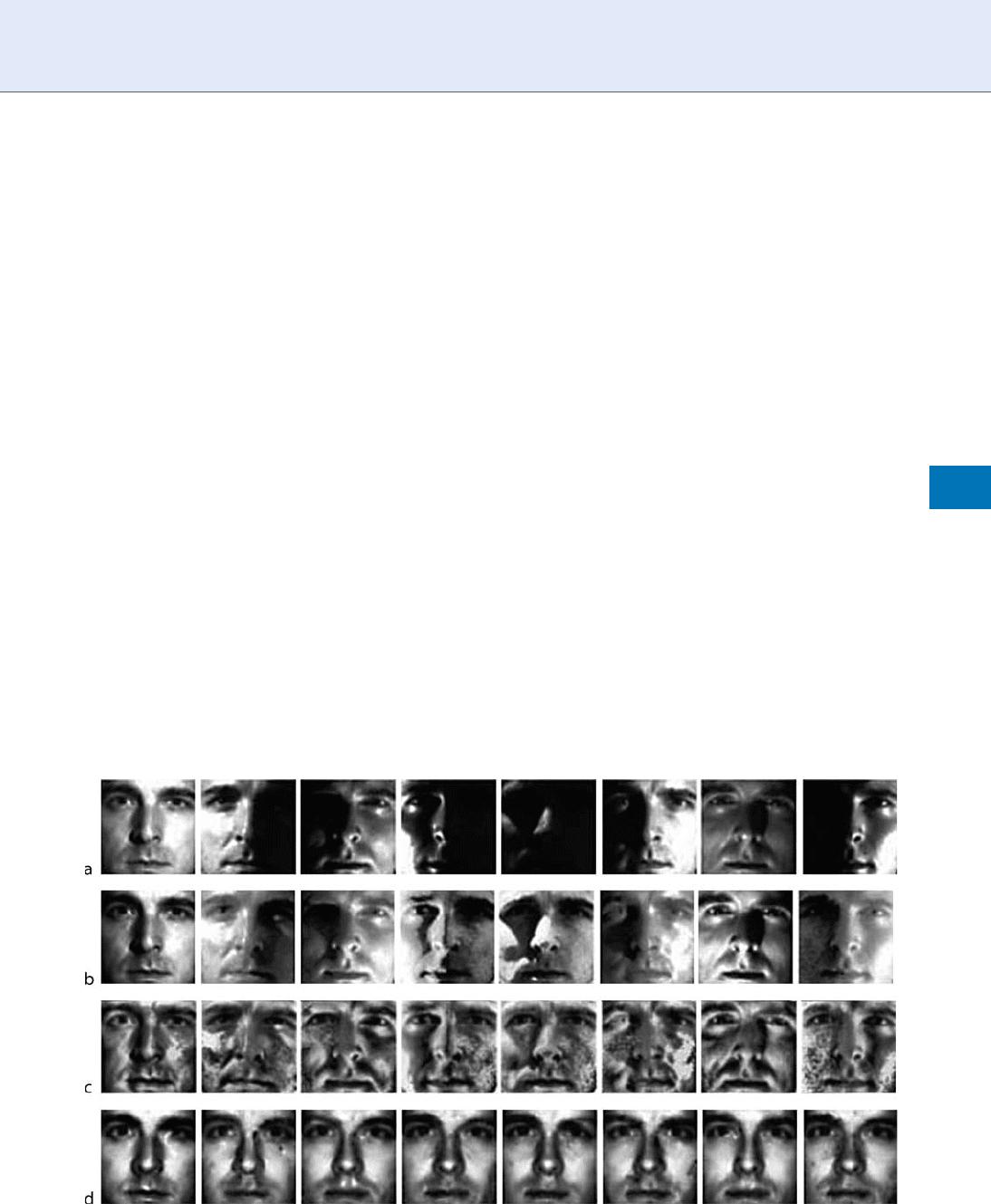
difficulties under varying lighting conditions. Some
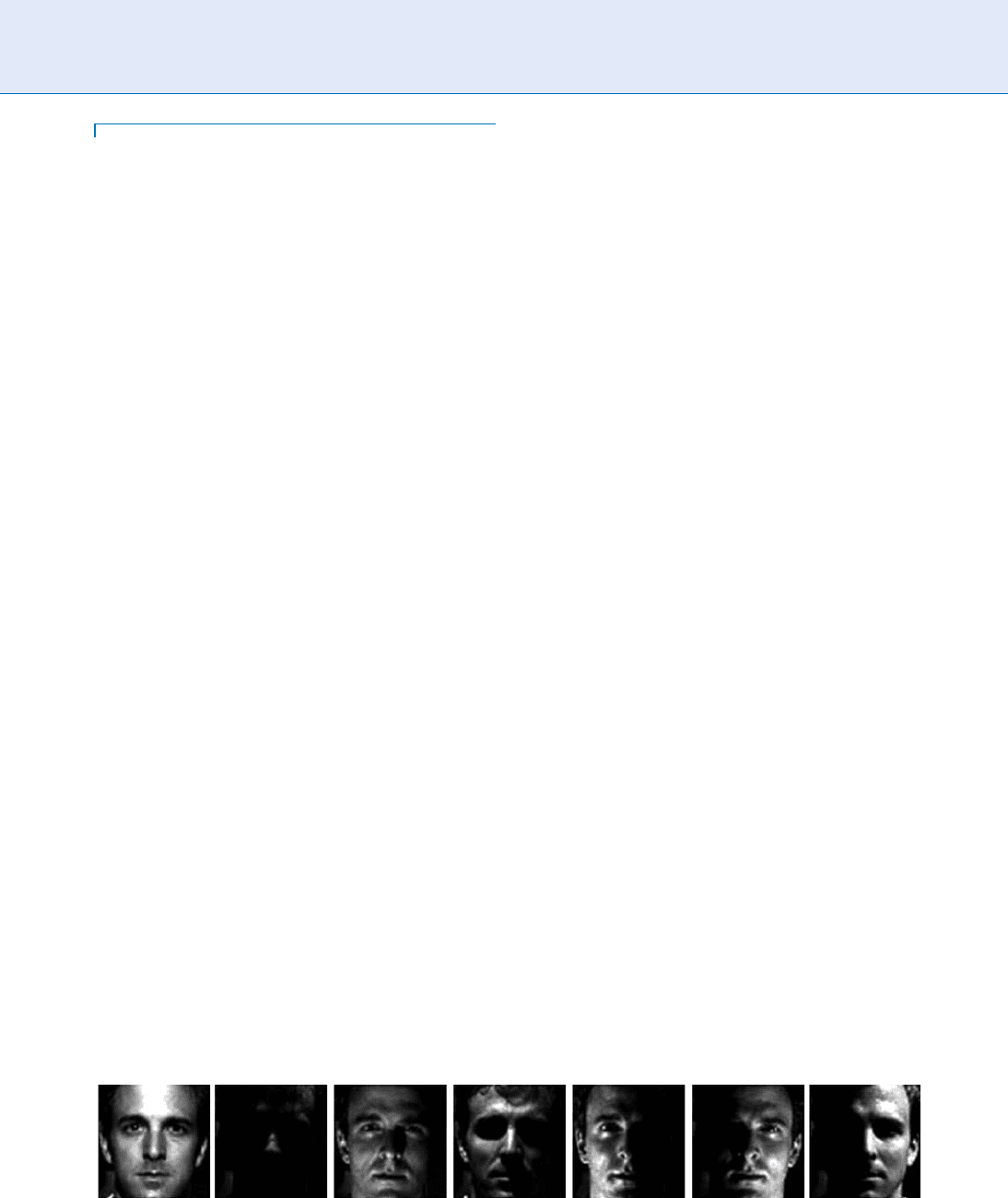
images under varying illuminations presented Fig. 1,
all images are from the Yal eB databa se [4]. It can be
seen that although all these images are of the same per-
son, due to the effect of uneven lighting, they look quite
different. Therefore, when the images are under varying
illumination, illumination compensation should be
performed before face recognition. Here, ‘‘illumination
compensation’ ’ means compensation for the uneven illu-
minations on human faces and reconstruction of face
images in normal lighting conditions, then the recon-
structed face images are used for classification.
Some algorithms have been proposed to reduce the
effect of uneven lighting from an image processing
point of view. Histogram equaliz ation (HE) is a com-
monly used method to convert an image so that it has a
uniform histogram, which is considered to produce an
‘‘optimal’’ overall contrast in the image. However, after
being processed by HE, the lighting condition of
an image under uneven illumination may sometimes
become even more uneven. Adaptive histogram equal-
ization (AHE) [5] computes the histogram of a local
image region centered at a given pixel to determine the
mapped value for that pixel leading to local contrast
enhancement. However, the enhancement often leads
to noise amplification in ‘‘flat’’ regions, and ‘‘ring’’
artifacts at strong edges. In addition, this technique is
computationally intensive. Zhu et al. [6] proposed an
illumination correction method, which uses an
affine transformation lighting model based on a local
estimation of the background and the illumi nation
gain. However, the method is useful only when
the images are under slowly varying illumination. The
Illumination Compensation. Figure 1 Samples of cropped faces under varying illuminations. The azimuth angles of the
lighting of images from left to right column are: 0
,0
,20
,35
,70
, 50
and 70
, respectively. The corresponding
elevation angles are: 20
,90
, 40
,65
, 35
, 40
and 45
, respectively.
716
I
Illumination Compensation
Block-based Histogram Equalization (BHE) method [7]
divides an image into a number of small blocks, and
histogram equalization is performed within each of
the image blocks. The BHE is simple, and the compu-
tation required is for less than that for AHE. However,
as in the case of the AHE, noises are also enhanced
after being processed by the BHE. The main idea
of Local Normalization (LN) [8] is to split the face
region into a set of triangular facets, and then the
intensity values within each facet are normalized to be
of zero mean and unit variance. This method is very
fast, but it is also sensitive to variations caused by
local shape distortions, such as expression variations.
On the basis of a model-based method, [7] the general
procedure for illumination compensation can be
understood.
Human Face Model and
Lighting Model
A face image is assumed to be a ▶ Lambertian surface,
which can be described by the product of the albedo
and the cosine angle between the point light source and
the surface normal as follows:
Ix; yðÞ¼r x; yðÞn x; yðÞs; ð1Þ
where I(x, y) is the intensity value observed of the
pixel at (x, y) in the image, 0 r(x, y) 1 is the
corresponding albedo, n(x, y) is the surface normal
direction, s is the light source direction, and its magni-
tude is the light source intensity. Suppose I(x, y) and
I
0
(x, y) represent the pixel intensity values at (x, y)of
the image under normal lighting conditions and the
image under a certain kind of illumination, and s and
s
0
are the corresponding light source directions, then
the corresponding illumination ratio image [9] can be
given as follows:
R
i
ðx; yÞ¼I
0
ðx; yÞ=Iðx; yÞ
¼ðrðx; yÞnðx; yÞs
0
Þ=ðrðx; yÞnðx; yÞsÞ
¼ðnðx; yÞs
0
Þ=ðnðx; yÞsÞ
¼ Aðx; yÞ; ð2Þ
where A(x, y) is determined by the surface normal
direction n(x , y) and the kind of illumination con-
cerned. From (2), the following can be obtained:
I
0
x; yðÞ¼Ax; yðÞIx; yðÞ: ð3Þ
If the effect of additive noise at each point (x, y)is
considered, the illumination model in (3) can be ex-
tended to the following:
I
0
x; yðÞ¼Ax; yðÞIx; yðÞþBx; yðÞ; ð4Þ
where A(x, y) and B(x, y) denote the multiplicative
noise and the additive noise for the pixel (x, y),
respectively.
From (2) and (4), it can be seen that A(x, y) and
B(x, y) are only determined by the shape information
of a human face and the lighting condition, which
hints us that if the shapes of identities are normalized
to be the same, the values of A(x, y) and B(x, y) are
invariant for different persons under the same lighting
conditions. Therefore, after performing shape normal-
ization, the values of A(x, y) and B(x, y) can be com-
puted point by point for a certain illumination. Then
these values can be used to undertake illumination
compensation.
According to the illumination categories used
in the YaleB databas e [4], the lig hting conditions
are divided into 65 categories. Each of the categories
has different azimuth angles and elevation angles of
the lighting. The azimuth angles in the database vary
from 130
to þ130
, and the elevation angle ranges
from 40
to þ90
. If both the azimuth angle and the
elevation angle are equal to 0
, it can be said that the
subject is under normal illumination.
Shape Normalization and Lighting
Compensation
Suppose that the pixel-wise correspondence between an
input image and a reference face image is known, which
can be determined by facial feature detection. The
input image can be separated into texture and shape
using a 2D face shape model [10]. The shape of a face is
coded as the displacement field from the reference
image, and the texture denotes an intensity map,
which is produced by mapping the original image on
to the reference image. All texture images have the
same shape as the reference image. According to the
authors, uneven illumination compensation is done on
the texture image in order to avoid disturbing the
shape information on the original image, i.e., in (1),
all identities have the same surface normal direction
distribution n. After illumination compensation, the
Illumination Compensation
I
717
I
compensated texture and the original shape are com-
bined to obtain the reconstructed image.
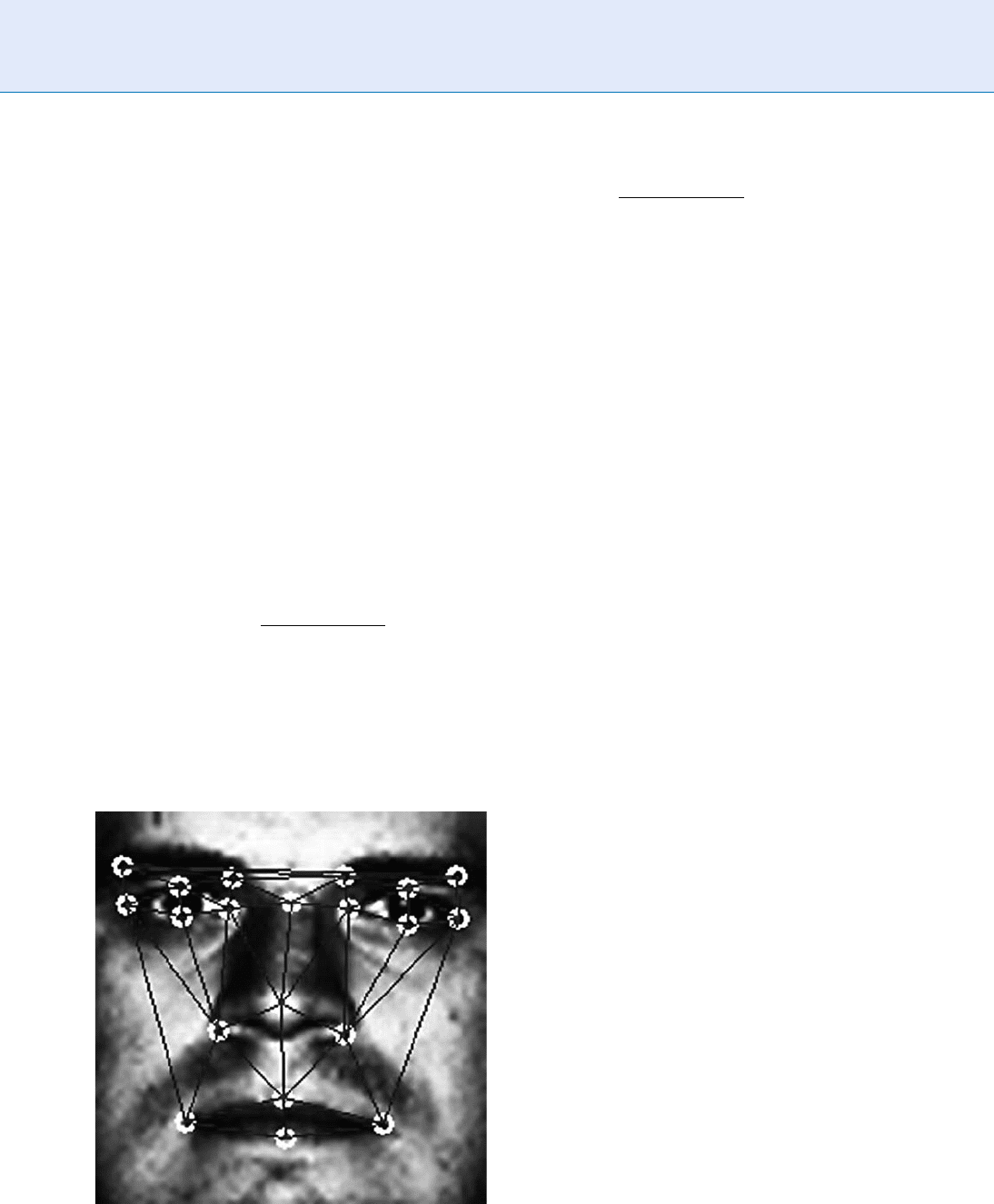
It is a challenge to find the pixel-wise correspon-
dence between two pictures, especially when they
are under uneven lighting conditions. Here, the posi-
tion of some facial feature points, such as the eyebrows,
eyes, nos e, and mouth, are first determined manually
(Fig. 2). The displacements of these key points between
a facial image and the reference image are subsequen-
tly computed. The reference shape is obtained from
the average 10 size-normalized and aligned images
from t he YaleB database. Using a triangle-b ased
cubic interpolation method [11], the input image
is mapped to the reference shape model. Afte r proces-
sing the mapped texture, it can be mapped
backwards from the reference shape to that of the
original shape.
Lighting compensation is performed based on the
mapped texture, which has a normal shape. From (4),
the following is obtained
Ix; yðÞ¼
I
0
x; yðÞBx; yðÞ
Ax; yðÞ
: ð5Þ
In order to avoid overflowing, all the intensity values
of I(x, y) are restricted to the range of [0, 255], so (5)
can be rewritten as follows.
Iðx; yÞ¼
0; Iðx; yÞ < 0;
255; Iðx; yÞ > 255;
I
0
ðx; yÞBðx; yÞ
Aðx; yÞ
; otherwise:
8
>
>
<
>
>
:
ð6Þ
Therefore, for an input image, if the illumination cate-
gory is determined and the corresponding values of
A(x, y) and B(x, y) are precomputed, (6) can be used
to calculate the reconstructed image, which is under
normal lig hting conditions.
Besides the effect of illumination on appearance, face
images of distinct subjects actually look quite different.
This is because the appearance of a human face is also
dependent on other factors, such as gender, race, and
makeup. In order to accurately estimate the light source
category, the distinctive elements of a person’s appear-
ance have to be eliminated to the extent possible while
keeping the illumination information unchanged. Then,
the illumination map is used to determine the illumina-
tion category. An image processed by the BHE [7]is
considered as a reference image. The BHE processed
image is then compared to the same image processed
by the HE to obtain a pixel-wise difference between the
two images. This difference image, which is called an
illumination map, reflects the effect of the light source
on different parts of the face image, and can be used to
estimate the illumination category.
The determination of the illumination category
is done by (LDA)
▶ Linear Discriminant Analysis [12].
The training images are divided into 65 different
categories on the basis of their lighting conditions,
and each category includes nine images that are under
the same lighting condition and that belong to differ-
ent people in the YaleB database.
Based on the training images in the YaleB database,
the optimal values for A
i
(x, y) and B
i
(x, y) for each
illumination category can be estimate d by means of the
least-squared method. For each illumination category
i, suppose that the number of training samples equa ls
m, then (4) can be rewritten as follows:
I
0
1
ðx; yÞ
.
.
.
I
0
k
ðx; yÞ
.
.
.
I
0
m
ðx; yÞ
2
6
6
6
6
6
6
6
6
4
3
7
7
7
7
7
7
7
7
5
¼
I
1
ðx; yÞ 1
.
.
.
.
.
.
I
k
ðx; yÞ 1
.
.
.
.
.
.
I
m
ðx; yÞ 1
2
6
6
6
6
6
6
6
6
4
3
7
7
7
7
7
7
7
7
5
A
i
ðx; yÞ
B
i
ðx; yÞ
;
where i ¼ 1; ...; 65 and k ¼ 1; ...; m:
ð7Þ
Illumination Compensation. Figure 2 Facial feature
points that are used to build a pixel-wise correspondence.
718
I
Illumination Compensation
Let F
0
¼½I
0
1
ðx; yÞI
0
k
ðx; yÞI
0
m
ðx; yÞ
T
; where T
represents the transpose, I
0
k
x; yðÞis the kth subject
under the ith lighting category in the training set, and
F ¼
I
1
ðx; yÞ 1
::
I
k
ðx; yÞ 1
::
I
m
ðx; yÞ 1
2
6
6
6
6
6
6
4
3
7
7
7
7
7
7
5
;
where I
k
(x, y) represents the face of the kth subject in
the training set under normal lighti ng conditions.
Then (7) can be written as follows:
F
0
¼ F
A
i
ðx; yÞ
B
i
ðx; yÞ
; i ¼ 1; ...; 65: ð8Þ
As the images in the different row of F, i.e., I
k
(x, y), are
images of different people, they are independent of
each other. The least-squared solutio n to (8) can be
calculated as follows:
A
i
ðx; yÞ
B
i
ðx; yÞ
¼ F
T
F
1
F
T
F
0
; i ¼ 1; ...; 65: ð9Þ
Using (9), the optimal value of A
i
(x, y) and B
i
(x, y) for
the ith lighting category can be computed, and A
i
(x, y)
and B
i
(x, y) are called A-map and B-map, respectively.
(For more detailed descriptions, refer to Xie and
Lam [7]).
Experimental Results
The training of the illumination compensation algo-
rithm is based on the YaleB database. Therefore, the
performance of the algorithm can be evaluated by
utilizing other databases such as the Yale face database,
[13] the YaleB face database, and the AR face data-
base [14]. For each database, only images with an
upright frontal view and a neutral expression are se-
lected. The original images in the databases are shown
in the first row of Figs. 3–5, images processed by the
HE in the second row, those processed by the BHE in
the third row, and images processed by the introduced
algorithm in the fourth row.
After illumination compensation, the recon-
structed images are used for face recognition. The
PCA is used to measure the recognition rates after
processing the images by different illumination com-
pensation techniques. In each database, one image for
each subject with normal illumination is selected as a
Illumination Compensation. Figure 3 Some experimental results based on the YaleB database. (a) original images,
(b) images processed by the HE, (c) images processed by the BHE, (d) images processed by the introduced algorithm.
Illumination Compensation
I
719
I