Lyons W.C. (ed.). Standard handbook of petroleum and natural gas engineering.2001- Volume 1
Подождите немного. Документ загружается.

Downhole Motors
895
3000
n
v)
.-
a
U
v)
2000
0
-I
a
3
v)
v)
L.
2
a
1000
-
m
0
!-
c
0
q
(QPm)
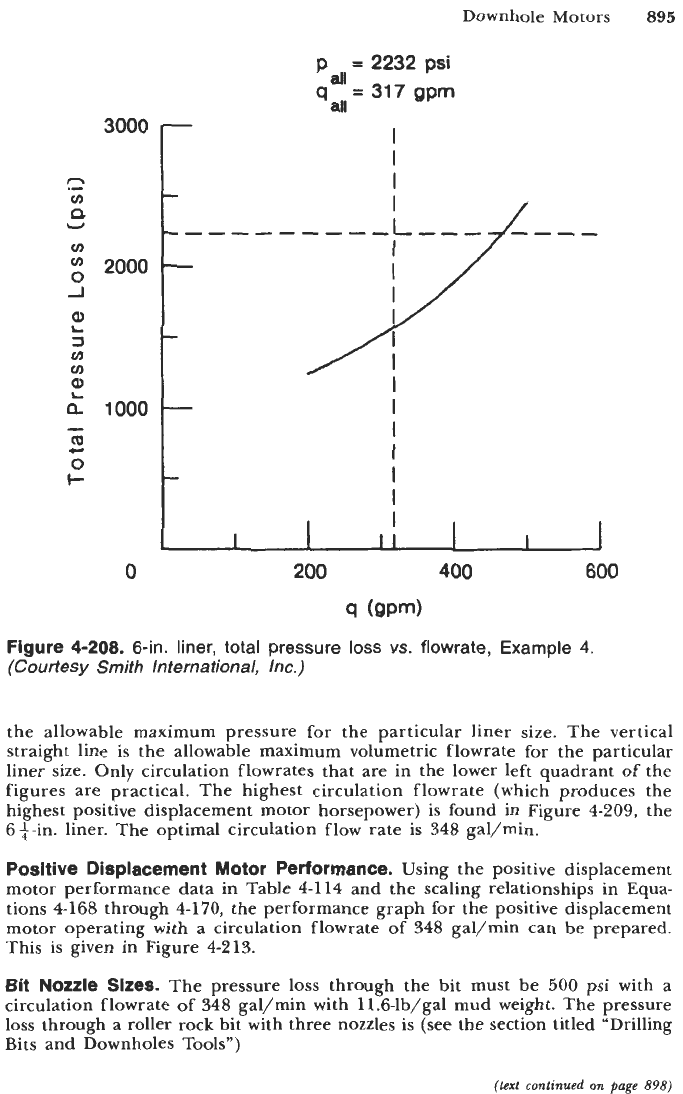
Figure
4-208.
6-in.
liner,
total
pressure
loss vs.
flowrate, Example
4.
(Courtesy Smith International, Inc.)
the allowable maximum pressure for the particular liner size. The vertical
straight line is the allowable maximum volumetric flowrate for the particular
liner size. Only circulation flowrates that are in the lower left quadrant of the
figures are practical. The highest circulation flowrate (which produces the
highest positive displacement motor horsepower) is found in Figure
4-209,
the
6%-in. liner. The optimal circulation flow rate is 348 gal/min.
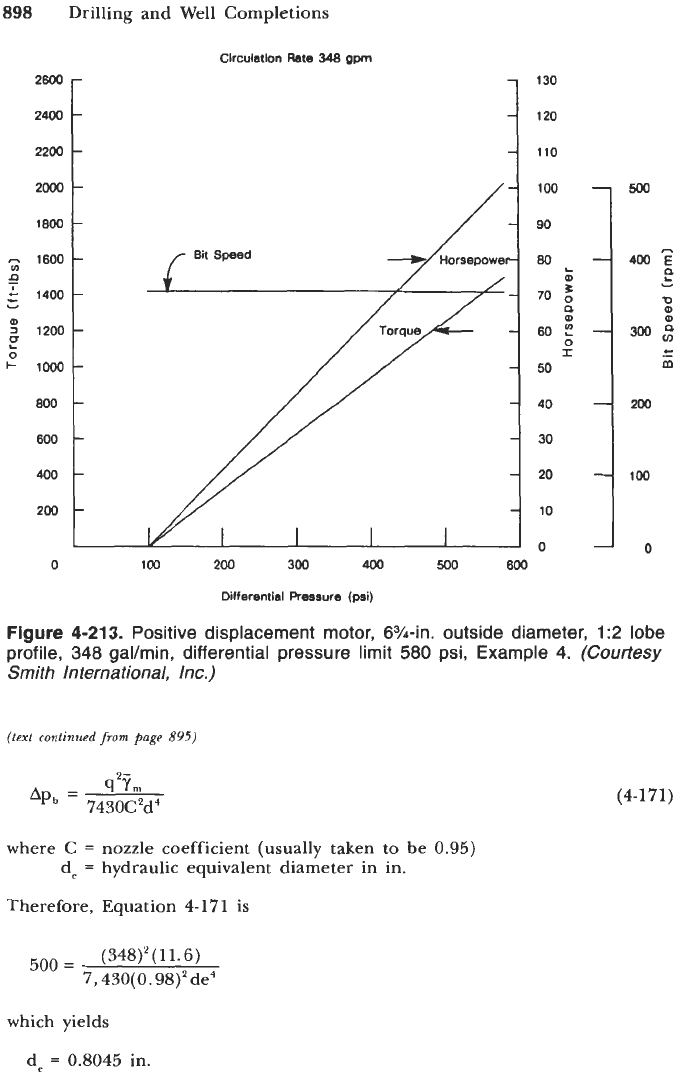
Positive Displacement
Motor
Performance.
Using the positive displacement
motor performance data in Table
4-114
and the scaling relationships in Equa-
tions 4-168 through
4-170,
the performance graph
for
the positive displacement
motor operating with a circulation flowrate of 348 gal/min can be prepared.
This is given in Figure 4-213.
Bit Nozzle Sizes.
The pressure loss through the bit must be
500
psi with a
circulation flowrate of 348 gal/min with 11.6-lb/gal mud weight. The pressure
loss through a roller rock bit with three nozzles
is
(see the section titled “Drilling
Bits and Downholes Tools”)
(rex1
continued
on
page
898)
896
Drilling and Well Completions
pd=
1877
pai
q
=
348
gpm
I
I
=
30w
r
I
v)
a
U
v)
v)
0
-I
a
3
v)
ln
L
2000
-/
I
I
I
1
I
II
I
0
200
400
600
q
(gpm)
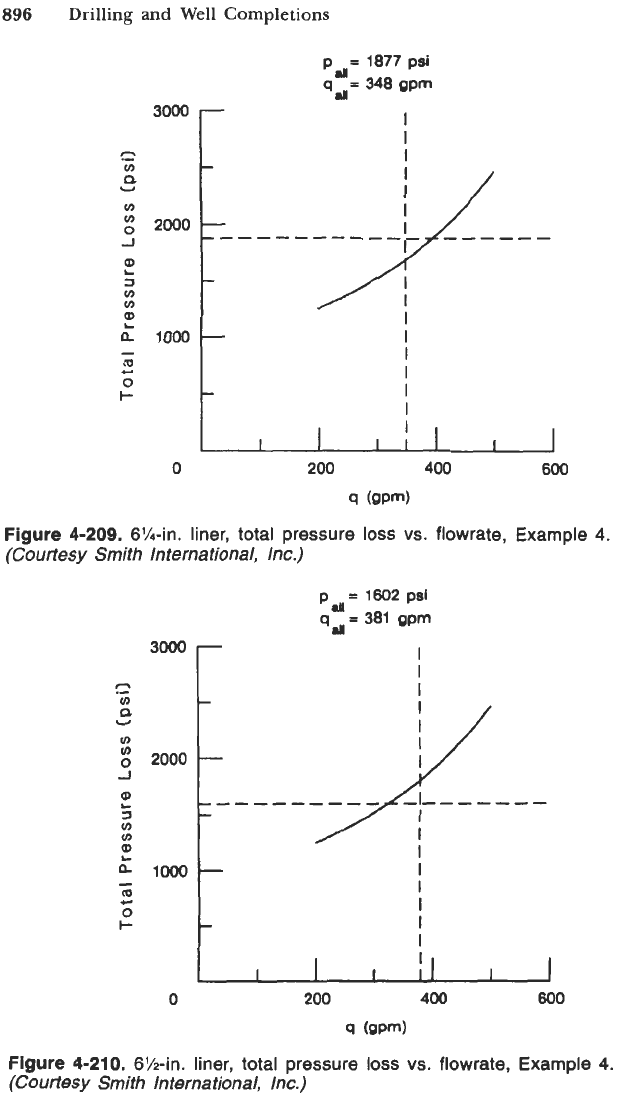
Figure
4-209.
6%-in. liner, total pressure
loss vs.
flowrate, Example
4.
(Courtesy Smith International, Inc.)
pa=
1602
psi
q,=
381
gpm
3000
c
v)
a
U
m
:
2000
?!
J
3
v)
v)
a
c
lo00
m
0
I-
c
O
Figure
4-210.
6%-in. liner, total pressure loss vs. flowrate, Example
4.
(Courtesy Smith International, Inc.)
Downhole
Motors
897
p,= 1382 psi
qd,
=
414
opm
3000
I-
I
t?
v)
P
In
u
::
2000
1
a¶
E
1000
I
I
I
I
I
1
I
1
0
200
400
600
q
(opm)
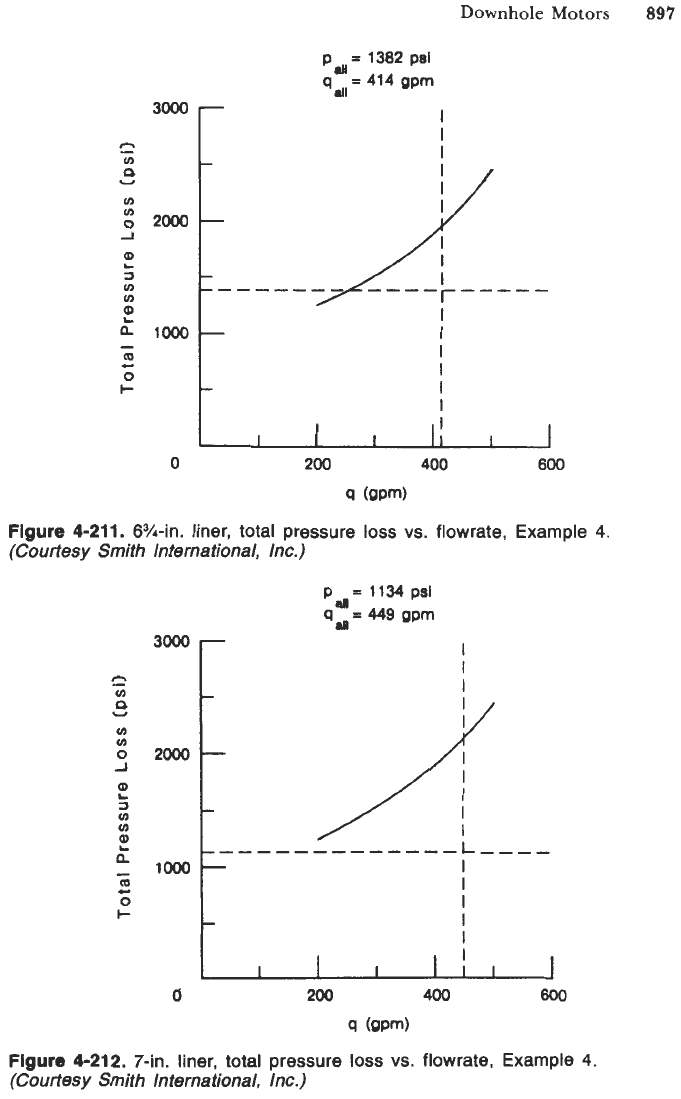
Figure
4-211. 6%-in. liner, total pressure
loss
vs.
flowrate, Example
4.
(Courtesy Smith International, Inc.)
c
v)
P
v)
v)
0
-I
U
v)
2
n
I-
p
=
1134
psi
an
qu=
449
opm
I
3000
-----
I
I
I
I
I
I
I
I
I
II
I
I
0
200
400
600
q
(opm)
Figure
4-212. 7-in. liner, total pressure
loss
vs.
flowrate, Example
4.
(Courtesy Smith International, Inc.)
898
Drilling and Well Completions
-
-
-
-
Circulation Rate
348
gpm
-500
400
-z
P
u
0
0
m
300
g
c
-
m
200
100
-0
2600
2400
2200
1800
-
1600
9
&
1400
v
:
1200
Y
I-
1MM
800
600
400
200
130
120
110
100
90
*_
70
2
60
50
0
al
I:
40
30
20
10
0
0
100 200 300
400
500
600
Differential Pressure
(psi)
Figure
4-213.
Positive displacement motor, 6%-in. outside diameter,
1
:2
lobe
profile,
348
gallmin, differential pressure limit
580
psi, Example
4.
(Courtesy
Smith International, Inc.)
(lest
continued
from
page
895)
q2Tm
=
7430C2d4
where
C
=
nozzle coefficient (usually taken
to
be
0.95)
de
=
hydraulic equivalent diameter in in.
Therefore, Equation 4-171 is
(348)'
(1
1.6)
7,430(
0.98)'
de4
500
=
(4-171)
which yields
de
=
0.8045 in.
Downhole Motors
899
The hydraulic equivalent diameter is related to the actual nozzle diameters by
de
=
[ad:
+
bd,“
+
cd,2]’/’’
where a
=
number of nozzles with diameter d,
b
=
number of nozzles with diameter d,
c
=
number of nozzles with diameter d,
d,,
d,
and d,
=
three separate nozzle diameters in in.
Nozzle diameters are usually in 32nds of an inch. Thus,
if
the bit has three
nozzles with
$
of
an inch diameter, then
de
=
[(3)(0.4688)2]”2
=
0.8120
in.
The above hydraulic equivalent diameter is close enough to the one obtained
with Equation
4-171.
Therefore, the bit should have three +-in. diameter nozzles.
Special Applications
As
it
becomes necessary to infill drill the maturing oil and gas reservoirs in
the continental United States and elsewhere in the world, the need to minimize
or eliminate formation damage will become an important engineering goal.
To
accomplish this goal, air and gas drilling techniques will have to be utilized (see
the section titled “Air and Gas Drilling”). It is very likely that the future drilling
in the maturing oil and gas reservoirs will be characterized by extensive use of
high-angle directional drilling coupled with air and gas drilling techniques.
The downhole turbine motor designed to be activated by the flow of incom-
pressible drilling mud cannot operate on air, gas, unstable foam or stable foam
drilling fluids. These downhole turbine motors can only be operated on drilling
mud or aerated mud.
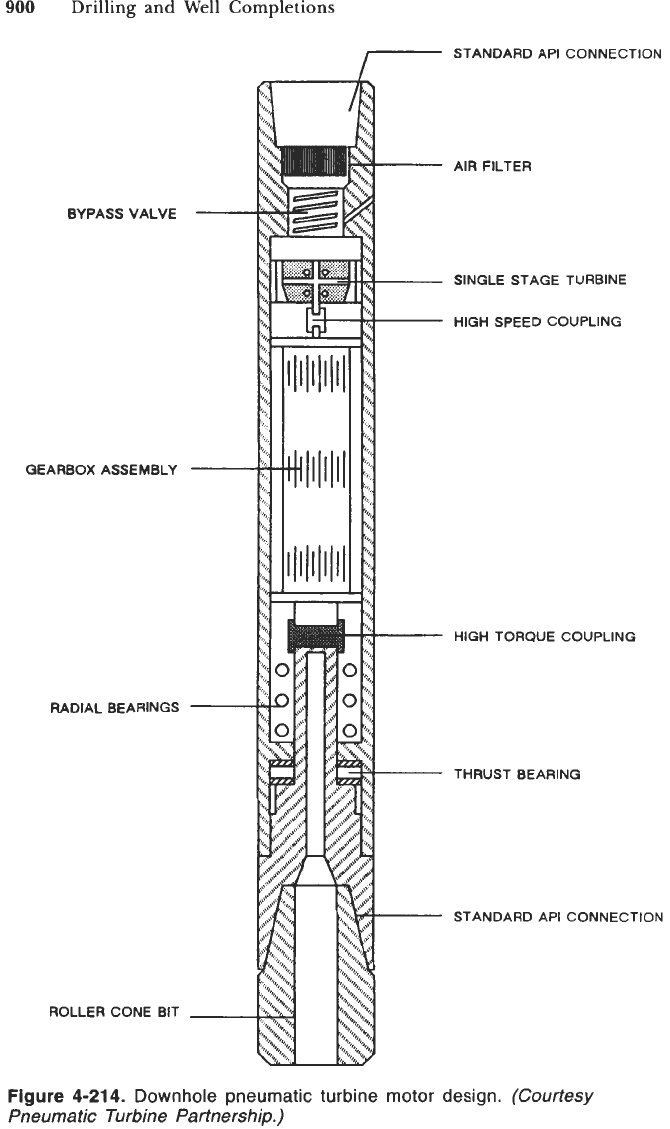
Recently, a special turbine motor has been developed to operate on air, gas
and unstable foam
[82].
This is the downhole pneumatic turbine motor. This
motor has been tested in the San Juan Basin in New Mexico and the Geysers
area in Northern California. Figure
4-214
shows the basic design of this drilling
device. The downhole pneumatic turbine motor is equipped with a gear reduc-
tion transmission. The compressed air or gas that actuates the single stage
turbine motor causes the rotor of the turbine to rotate at very high speeds (Le.,
-20,000
rpm). A drill bit cannot be operated at such speeds; thus it is necessary
to
reduce the speed with a series of planetary gears. The prototype downhole
pneumatic turbine motor has a gear reduction transmission with an overall gear
ratio of
168
to
1.
The particular version of this motor concept that is under-
going field testing is a 9-in. outside diameter motor capable of drilling with a
10
4-in.-diameter bit or larger. The downhole pneumatic turbine motor will
deliver about
40
hp for drilling with a compressed air flowrate of
3,600
scfm.
The motor requires very little additional pressure at the surface to operate
(relative to normal air drilling with the same volumetric rate).
The positive displacement motor of the Moineau-type design can be operated
with unstable foam (or mist) as the drilling fluid. Some liquid must be placed
in the air or gas flow to lubricate the elastomer stator as the metal rotor rotates
against the elastomer. Positive displacement motors have been operated quite
900
Drilling and Well Completions
/--
STANDARD API CONNECTION
BYPASS VALVE
GEARBOX ASSEMBLY
RADIAL BEARINGS
ROLLER CONE BIT
AIR FILTER
SINGLE STAGE TURBINE
HIGH SPEED COUPLING
HIGH TORQUE COUPLING
THRUST BEARING
STANDARD API CONNECTION
Figure
4-214.
Downhole pneumatic turbine motor design.
(Courtesy
Pneumatic Turbine Partnership.)
MWD and LWD
901
successfully in many air and gas drilling situations. The various manufacturers
of
these motors can give specific information concerning the performance
characteristics of their respective motors operated with air and gas drilling
techniques. The critical operating characteristic of these motors, when operated
with unstable foam, is that these motors must be loaded with weight on bit when
circulation is initiated. If the positive displacement motor is allowed to be started
without weight on bit, the rotor will speed up quickly to a very high speed, thus
burning out the bearings and severely damaging the elastomer stator.
MWD AND LWD
Most of the cost in a well is expanded during the drilling phase. Any amount
of information gathered during drilling can be used to make decisions regarding
the efficiency of the process. But the scope and ultimate cost to gather and
analyze such information must be offset by a decrease in drilling expenditures,
an increase in drilling efficiency and an increase in safety.
As drilling technology moved the pursuit of hydrocarbon resources into higher-
cost offshore and hostile environments, intentionally deviated boreholes required
information such as azimuth and inclination that could not be derived by surface
instruments. Survey instruments, either lowered on a sand line or dropped into
the drill pipe for later retrieval, to some degree satisfied the requirements but
consumed expensive rig time and sometimes produced questionable results.
For many years researchers have been looking for a simple, reliable
measure-
ment while drilling
technique, referred to by its abbreviation MWD. As early as
1939, a logging while drilling (LWD) system, using an electric wire, was tested
successfully but was not commercialized [89,90]. Mud pulse systems were first
proposed in 1963 [91,92]. The first mechanical mud pulse system was marketed
in 1964 by Teledrift for transmitting directional information [93]. In the early
1970s, the steering tool, an electric wire operated directional tool, gave the first
real-time measurements while the directional buildup was in progress. Finally,
the first modern mud pulse data transmission system was commercialized in
1977 by Teleco [94]. State-of-the-art surveys of the technology were made in 1978
[95], in 1988 [96-981, and in 1990 [99].
A
problem with the early MWD mud pulse systems was the very slow rate of
data transmission. Several minutes were needed to transmit one set of directional
data. Anadrill working with a Mobil patent [loo] developed in the early 1980s
a continuous wave system with a much faster data rate. It became possible to
transmit many more drilling data, and also to transmit logging data making LWD
possible. Today, as many as 16 parameters can be transmitted in 16
s.
The dream
of the early pioneers has been more than fulfilled since azimuth, inclination,
tool face, downhole weight-on-bit, downhole torque, shocks, caliper, resistivity,
gamma ray, neutron, density, Pe, sonic and more can be transmitted in real-
time to the rig floor and the main office.
MWD Technology
Steering
Tool
Up until 1970 all directional drilling was conducted using singleshot and
multishot data. The normal procedure was:
a. drill vertically in rotary to the kick-off depth;
b. kick-off towards the target using a downhole motor and a bent sub to an
inclination of approximately 10';
902
Drilling and Well Completions
c. resume rotary drilling with the appropriate bottomhole assembly to build
angle, hold, or drop.
The kick-off procedure required numerous single-shot runs to start the
deviation in the correct direction. Since, during this phase, the drillpipe was
not rotating a steering tool was developed to be lowered on an electric wireline
instead of the single shot. The measurements were then made while drilling.
Measurements by electric cable are possible only when the drillstem is not
rotating, hence with a turbine or downhole motor. The logging tool
is
run in
the drillstring and is positioned by a mule shoe and key. The process is identical
to the one used in the single-shot measurements. The magnetic orientation
sensor is of the flux-gate type and measures the three components of the earth’s
magnetic field vector in the reference space of the logging tool. Three accelero-
meters measure the three components of the gravity vector still in the same
reference space. These digitized values are multiplexed and transmitted by an
insulated electric conductor and the cable armor toward the surface. On the
surface a minicomputer calculates the azimuth and the drift of the borehole as
well as the angle of the tool face permanently during drilling. In the steering-
tool system, the computer can also determine the azimuth and slant of the
downhole motor underneath the bent sub and thus anticipate the direction
that the well is going to take. It can also determine the trajectory followed.
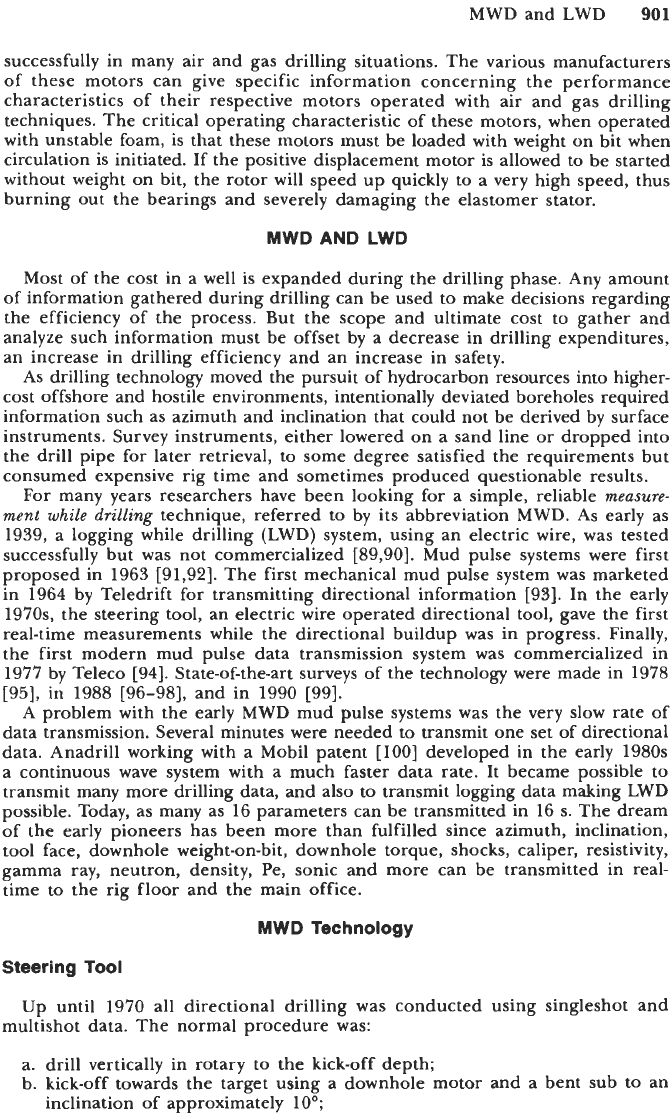
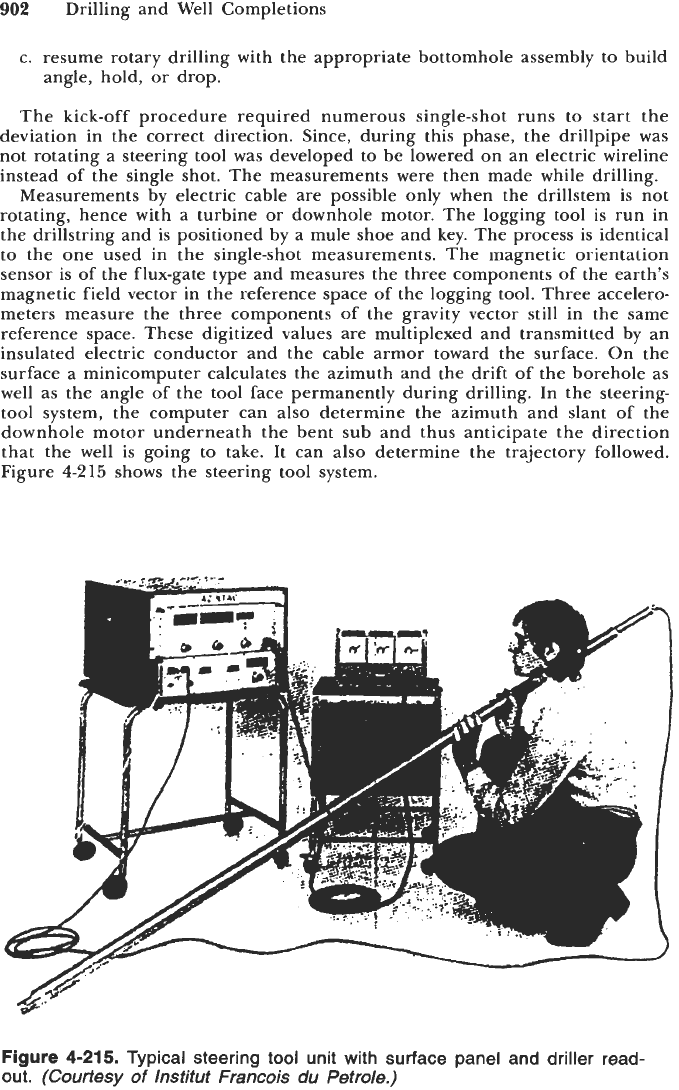
Figure
4-215
shows the steering tool system.
Figure
4-215.
Typical steering
tool
unit
with
surface panel and driller read-
out.
(Courtesy
of
lnstitut Francois
du
Petrole.)
MWD
and
LWD
903
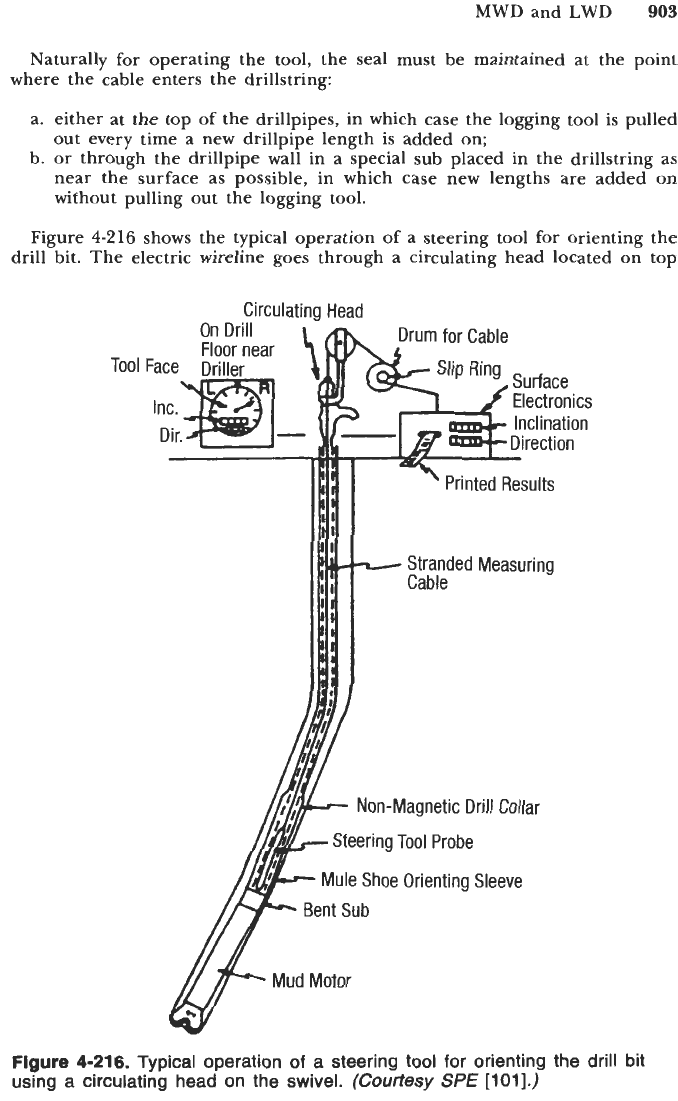
Naturally for operating the tool, the seal must be maintained at the point
where the cable enters the drillstring:
a. either at the top of the drillpipes, in which case the logging tool is pulled
out every time a new drillpipe length is added on;
b.
or
through the drillpipe wall in a special sub placed in the drillstring as
near the surface as possible, in which case new lengths are added on
without pulling out the logging tool.
Figure
4-216
shows the typical operation of a steering tool for orienting the
drill bit. The electric wireline goes through a circulating head located on top
Circulatina
Head
Tool
Figure
4-216.
Typical operation
of
a steering
tool
for orienting the drill bit
using a circulating head on the swivel.
(Courtesy
SPE
[loll.)
904
Drilling and Well Completions
of the swivel.
As
mentioned previously, the tool has to be pulled out when
adding a single.
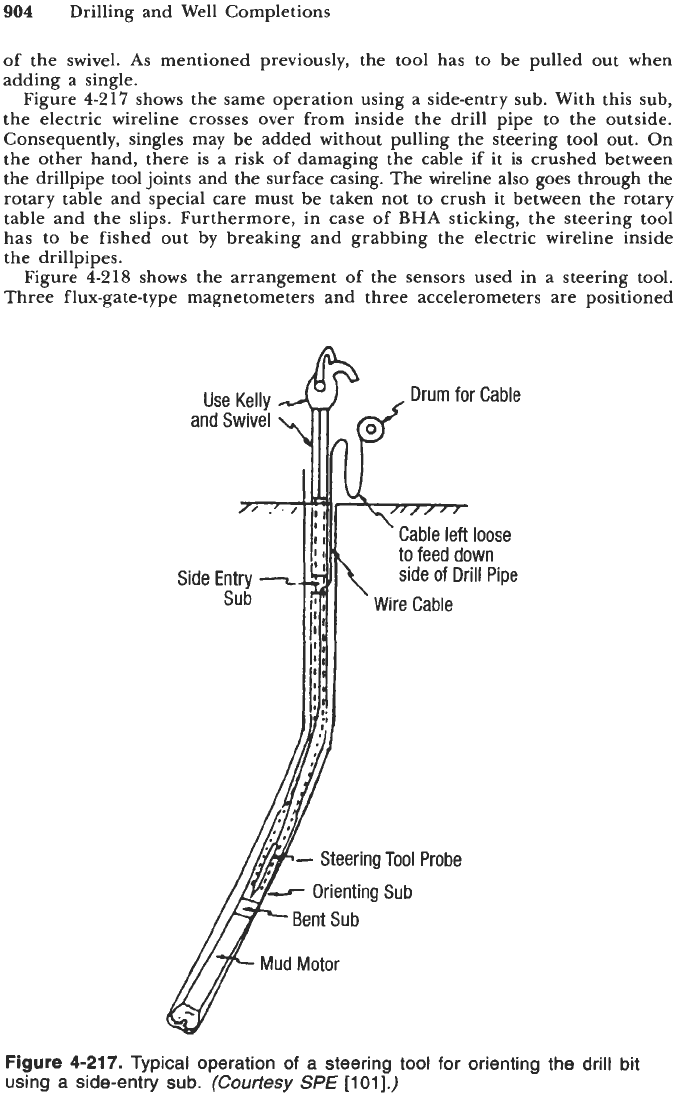
Figure
4-217
shows the same operation using
a
side-entry sub. With this sub,
the electric wireline crosses over from inside the drill pipe
to
the outside.
Consequently, singles may be added without pulling the steering tool out. On
the other hand, there is a risk of damaging the cable if it is crushed between
the drillpipe tool joints and the surface casing. The wireline also goes through the
rotary table and special care must be taken not to crush it between the rotary
table and the slips. Furthermore, in case of
BHA
sticking, the steering tool
has to be fished out by breaking and grabbing the electric wireline inside
the drillpipes.
Figure
4-218
shows the arrangement of the sensors used in a steering
tool.
Three flux-gate-type magnetometers and three accelerometers are positioned
and Use
S;
Kelly
,R,,
Drum
,
,
,
for
Cable
I.
./
,,
Cable left loose
-
Steering
Tool
Probe
Figure
4-217.
Typical operation
of
a steering tool for orienting the drill bit
using a side-entry sub.
(Courtesy
SPE
[loll.)