Михайлов В.С, Кудрявцев В.Г, Давыдов В.С. Практическая мореходная астрономия
Подождите немного. Документ загружается.

С учетом этой погрешности высотные линии положения (I′-I′ и II′-II′) пересекаются не в т. M
0
, а в т.
M′
0
.
А если систематическая погрешность имеет другой знак и другую величину → m″
cc
, то высотные
линии положения (I″-I″ и II″-II″) пересекутся уже в т. M″
0
.
Из рис. 13.3 следует: что независимо от знака и величины систематической (повторяющейся)
погрешности ВЛП будут пересекаться в точках расположенных на одной прямой линии, которую
называют астрономической биссектрисой. Эта прямая всегда совпадает со средним азимутом
(13.1)
Теперь можно сделать вывод, что «Астрономическая биссектриса свободна от систематических
погрешностей и представляет собой новую линию положения на которой и будет находится
вероятнейшее место судна, свободное от систематических погрешностей».
Где точно находится это место на линии А
СР
при 2-х ВЛП мы сказать не можем, а при
определении места судна по высотам 3-х звезд это сделать можно.
Если все 3 светила расположены по всему горизонту (с Δ А ~ 120°), то вероятнейшее место
судна будет находится внутри фигуры погрешностей, в точке пересечения биссектрис внутренних
углов (рис. 13.4).
Рис.13.4. Вероятнейшее место судна
На рис. 13.4 заштрихованы «теневые» то есть неосвещенные стороны ВЛП.
Биссектрисы проводятся через углы, стороны которых имеют одинаковую освещенность (на
рис. 13.4 – теневую).
Если все наблюдаемые светила расположены по одну сторону горизонта (ΔА между крайними
светилами <180°) то вероятнейшее место судна будет (или может) находиться вне треугольника
погрешностей (рис. 13.5).
Рис.13.5. Вероятнейшее место судна при расположении трех светил с одного борта
Получив треугольник погрешностей и проведя биссектрисы углов, стороны которых имеют
одинаковую освещенность, находим точку пересечения биссектрис, которая даст нам вероятнейшее
место (т. M
0
), находящееся вне треугольника погрешностей, но свободное от систематических
(повторяющихся) погрешностей.
13.3. Отыскание вероятнейшего места судна в фигуре погрешности при наличии
только случайных погрешностей
Рис.13.6. Противомедиана
Если причиной образования фигуры погрешностей являются только случайные погрешности,
то вероятнейшее место судна находится внутри этой фигуры (если ВЛП равноточны) в точке
пересечения противомедиан, которые «свободны» от случайных погрешностей.
Построение противомедианы покажем на рис. 13.6.

Определяя место судна по высотам 3-х светил, после построения ВЛП, получили фигуру
погрешностей → ΔАВС.
Из т. В проводим медиану ВД → линию, делящую противолежащую сторону АС пополам (АД =
ДС).
Измеряем при т. В меньший из 2-х углов – ДВС = α.
Величину этого α отложим от стороны АВ и из т. В проведем линию ВЕ, которая и будет являться
противомедианной ( АВЕ = ДВС = α).
Достаточно построить, таким образом, еще одну противомедиану (при т. А или т. С) и точка их
пересечения даст нам вероятнейшее место судна, полученное астрономическим способом только под
влиянием случайных погрешностей.
Точка пересечения противомедиан – вероятнейшее место судна – всегда будет расположено
внутри фигуры погрешностей ближе к меньшей ее стороне и ближе к наибольшему углу
пересечения ВЛП.
В равнобедренном треугольнике погрешностей медианы совпадают с противомедианами и с
биссектрисами его внутренних углов и вероятнейшее место судна будет находится в центре такой
фигуры.
13.4. Отыскание вероятнейшего места судна в фигуре погрешности при наличии и
систематических (повторяющихся) и случайных погрешностей
В реальных условиях определения места судна в море имеют место и случайные и
систематические (повторяющиеся) погрешности. Поэтому, решение задачи отыскания вероятнейшего
места судна представляет определенную трудность и требует большого навыка.
Если фигура погрешности имеет не очень большие размеры, то есть наибольшая из ее сторон не
превышает 0,5 мили при плавании судна в прибрежных районах и 1,0÷1,5 мили при плавании судна в
открытом море – вероятнейшее место принимают глазомерно в центре такой фигуры (рис. 13.2б).
Если размеры фигуры погрешностей значительны (рис. 13.2в), то определяющим фактором для
отыскания вероятнейшего места судна является расположение по горизонту светил, высота которых
измерялась для определения места.
Ранее нами установлено, что при симметричном расположении светил по всему горизонту (ΔА ~
120° при 3-х*) вероятнейшее место судна, независимо от характера погрешностей, будет находится
внутри фигуры погрешностей (рис. 13.4), а при Δ А = 120° (3*) или Δ А = 90° (4*) → в ее центре. Для
отыскания вероятнейшего места судна в таких случаях применяется способ «биссектрис».
Говорить же о вероятнейшем месте судна в фигуре погрешностей при случае, когда все светила
находятся по одну сторону горизонта затруднительно, так как оно (место судна) может находиться
или внутри фигуры погрешностей на пересечении противомедиан (при действии только случайных
погрешностей) или вне ее на пересечении биссектрис углов, стороны которых имеют одинаковую
освещенность – рис. 13.5 → (при действии только систематических погрешностей) и при том все это
неоднозначно как в том, так и в другом случае.
На практике, в этом случае, вероятнейшее место судна принимается в точке пересечения 2-х
ВЛП, угол пересечения которых ближе к 90°, а при наличии навигационных опасностей → то место,
которое будет ближе всего находится к этой опасности (рис. 13.7).
Рис. 13.7. Обсервованное место судна с учетом навигационной обстановки
13.5. Практическое выполнение способа определения места судна в море по
высотам трех звезд и оценка точности обсервации
1. Подготовить к наблюдениям навигационный секстан, рабочие часы и бланк записи
астрономических наблюдений.
2. Проверить перпендикулярность зеркал секстана плоскости азимутального лимба.
3. Определить поправку рабочих часов (U
Ч
) по сличению с хронометром или по сигналам точного
времени.
4. Определить поправку индекса секстана (i) по звезде.
5. Произвести подбор трех светил для наблюдений (ΔА не <60° и h не <30°).
6. В быстрой последовательности измерить серию из трех высот каждой звезды (1-й наблюдатель),
замечая момент измерения по рабочим часам (2-й наблюдатель).
7. Сразу, после окончания измерений высот избранных светил, зафиксировать судовое время
(Приб. Т
c
) и отсчет лага (ОЛ).
8. На момент измерения (Приб. Т
c
) снять с путевой навигационной карты координаты счислимой
точки (φ
c
, λ
c
).
9. Записать в бланк температуру воздуха (t
B
°C), атмосферное давление (В
B
мм рт. ст.), курс судна
(ПУ), скорость хода (V
УЗ
) и высоту глаза наблюдателя (е
M
).
10. Рассчитать средние моменты (Т
CP
) и средние отсчеты секстана (ОС
CP
) каждой серии высот для
каждой наблюденной звезды.
11. Из формуляра секстана выбрать значение инструментальной поправки (S) для каждой серии по
«ОС
CP
».
12. Записать все данные в астрономический бланк ф. Ш-8б.
13. Рассчитать гринвичское время замера высоты каждой звезды (Т
ГP
= Т
CP1,2,3
+ U
Ч
) и, по МАЕ
текущего года, вычислить их экваториальные координаты (t
M
, δ).
14. По таблицам высот и азимутов светил («ТВА-57» или «ВАС-58») рассчитать горизонтные
координаты светил, а полученные их азимуты (А
c
) перевести в круговую систему счета.
15. Исправить отсчеты секстана (OC
CP1,2,3
) всеми необходимыми поправками и вычислить для 1-й и
2-й звезды значения приведенных высот (Прив. h
1,2
), а для 3-й звезды → значение истинной
высоты (Ист. h).
16. Рассчитать значения переносов (n
1,2,3
).
17. На обратной стороне астрономического бланка (ф. Ш-8б) или навигационной карте построить
высотные линии положения, и вычислить значения обсервованных координат (φ
0
, λ
0
). При случае
«неопределенности» (место вне треугольника погрешностей) проверить расчеты.
18. Оценить точность обсервованного места судна, произвести анализ полученной невязки,
оформить запись в судовом журнале.
Оценка точности обсервованного места судна, полученного по 3 ВЛП
Радиальная (круговая) СКП обсервованного места судна, полученного по 3-м ВЛП, может быть
рассчитана относительно радиальной СКП, рассчитанной по 2-м ВЛП по приближенной формуле:
M
0(3ВЛП)
≈ 0,8M
0(2ВЛП)
(мили)
(13.2)
Для расчета M
0(2ВЛП)
выбираются 2 ВЛП, Δ А которых ближе всего к 90°. При равноточных
наблюдениях:
(мили)
(13.3)
Если 3 светила расположены по всему горизонту и их разность азимутов находится в пределах
110°÷130°, то радиальная СКП обсервованного места может быть определена по приближенной
формуле:
M
0(3ВЛП)
= 1,2m
h
(мили)
(13.4)
где m
h
– СКП измерения высоты светила (дуг. мин.).
13.6. Определение места судна в море по высотам 4-х светил
Из астрономических способов наиболее надежным и точным является способ определения
места судна по высотам 4-х светил.
Для наблюдения подбираются светила, расположенные по всему горизонту, при смежных
разностях азимутов ΔА ≈ 90°. При соблюдении такого условия получают две пары почти параллельных
ВЛП. Все ВЛП приводятся к моменту измерения высоты последнего светила.
а)
б)
Рис. 13.8. Анализ фигуры погрешностей при четырех ВЛП
Из анализа освещенности сторон фигуры погрешностей (рис. 13.8) следует, что:
• если ВЛП попарно сходятся (расходятся), то промахи отсутствуют и вероятнейшее место судна
находится на пересечении биссектрис углов попарно образованных ВЛП (рис. 13.8а);
• если в фигуре погрешностей 2 ВЛП сходятся, а 2 ВЛП расходятся, то это говорит о наличии
промахов. В этом случае следует проверить все расчеты (рис. 13.8б), или повторить наблюдения.
При симметричном расположении азимутов светил по всему горизонту и равноточных ВЛП,
радиальная СКП обсервованного места оценивается по приближенной формуле:
M
0(4ВЛП)
≈ m
h
(13.5)
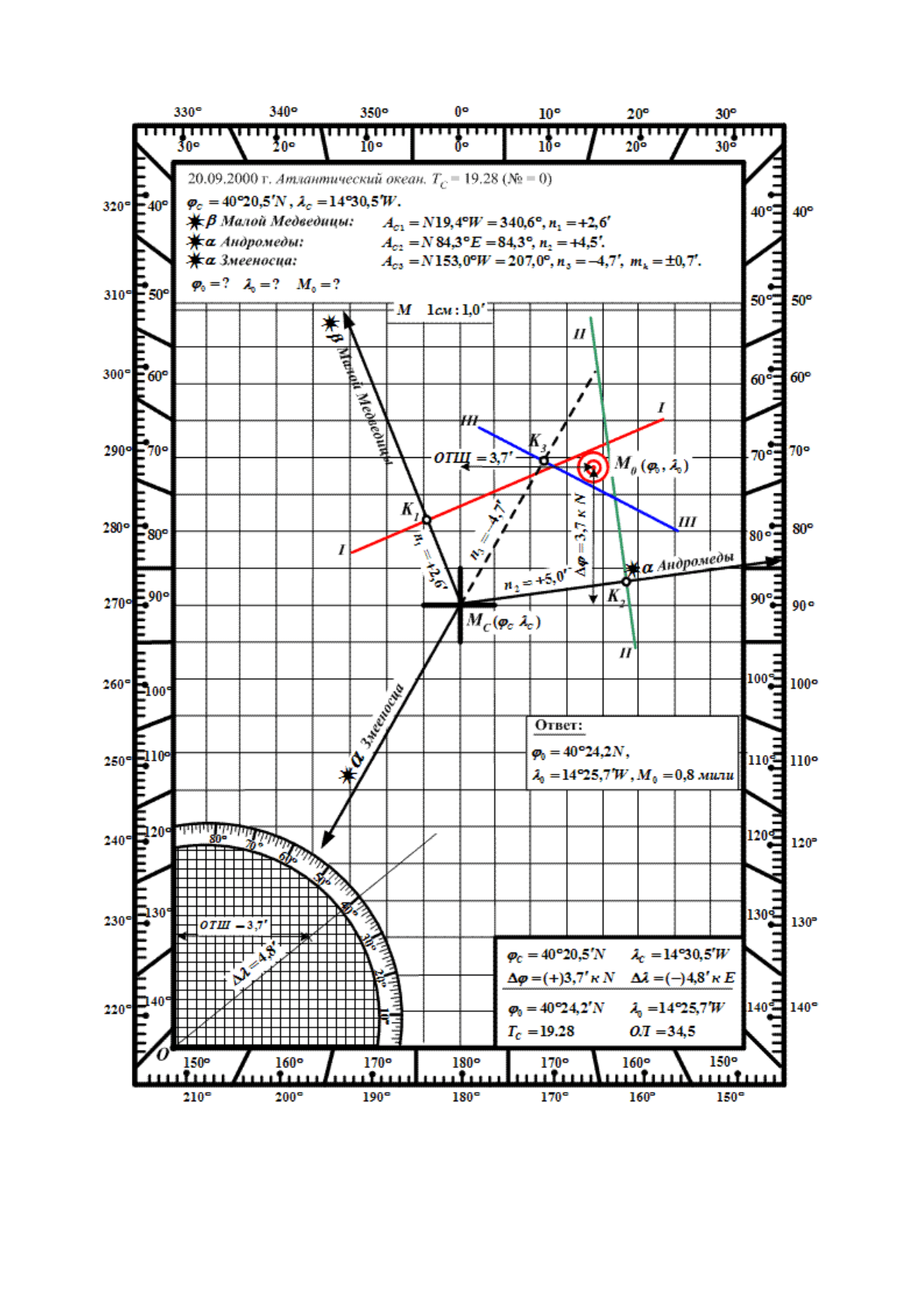
13.6.1. Примеры нахождения вероятнейшего места судна в фигуре погрешностей
Рис. 13.9. Расчет φ
0
λ
0
при малой фигуре погрешности
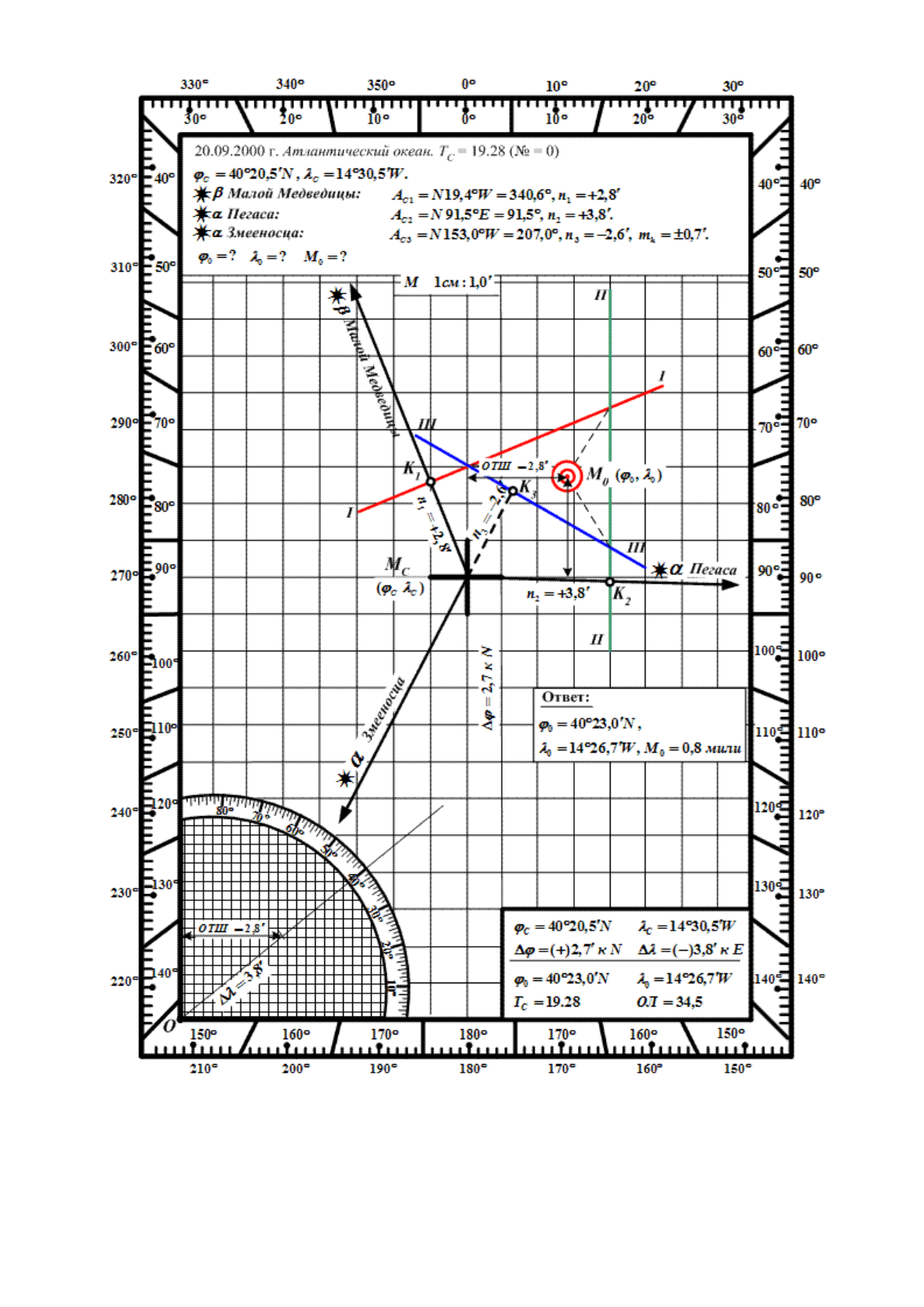
Рис. 13.10. Расчет φ
0
λ
0
при большой фигуре погрешности
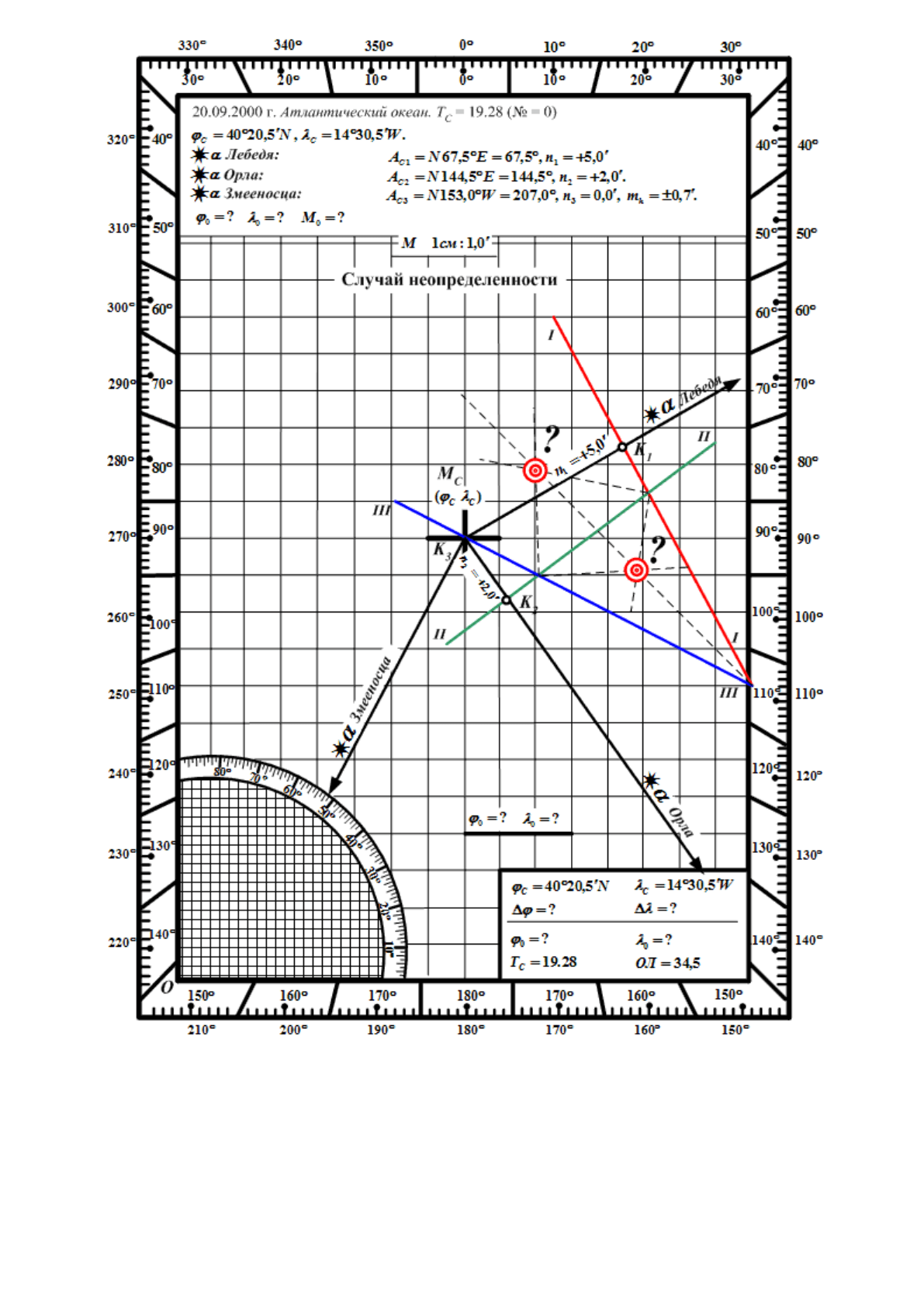
Рис.13.11. Случай неопределенности при трех ВЛП
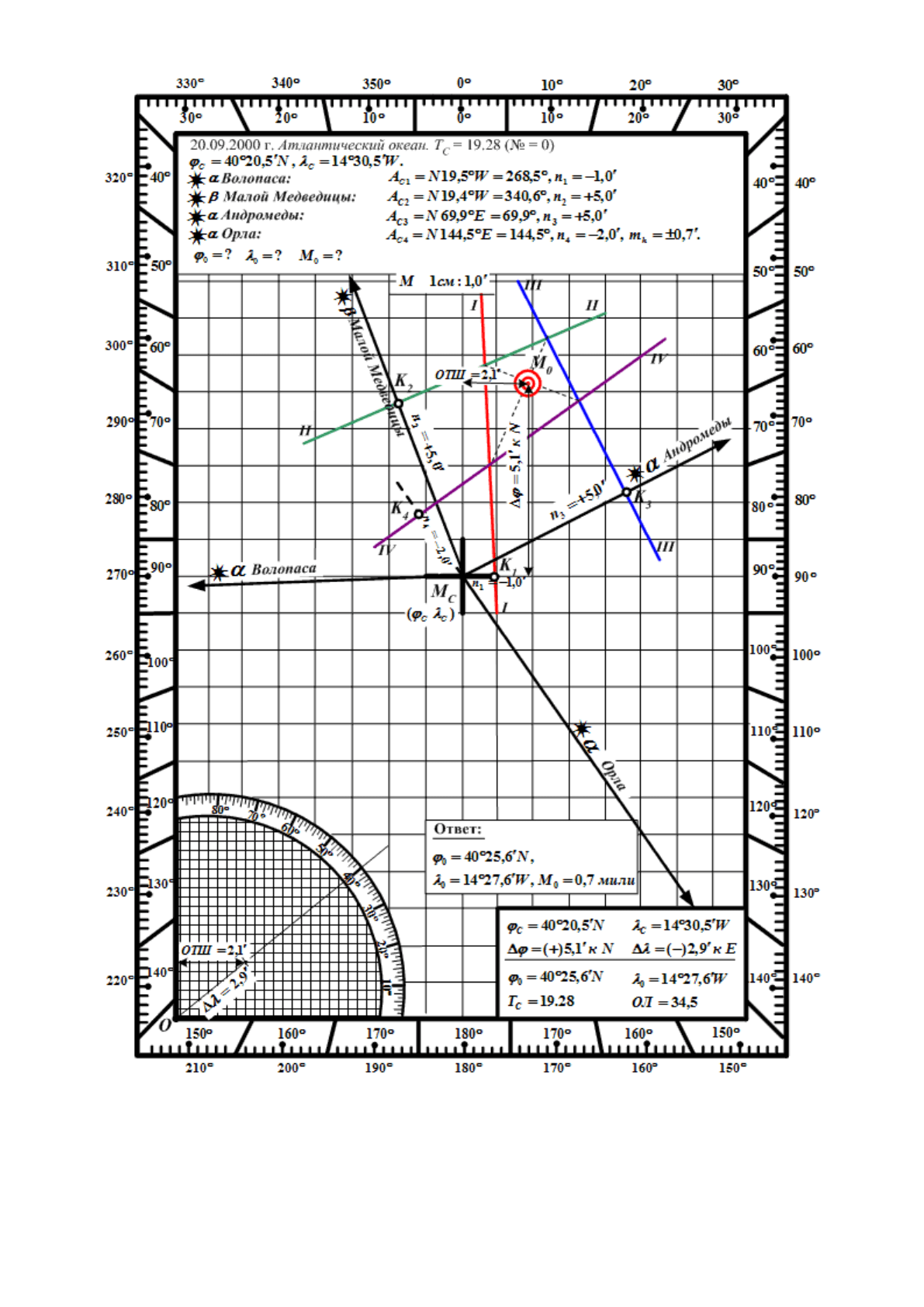
Рис.13.12. Расчет φ
0
λ
0
при четырех ВЛП (вариант)
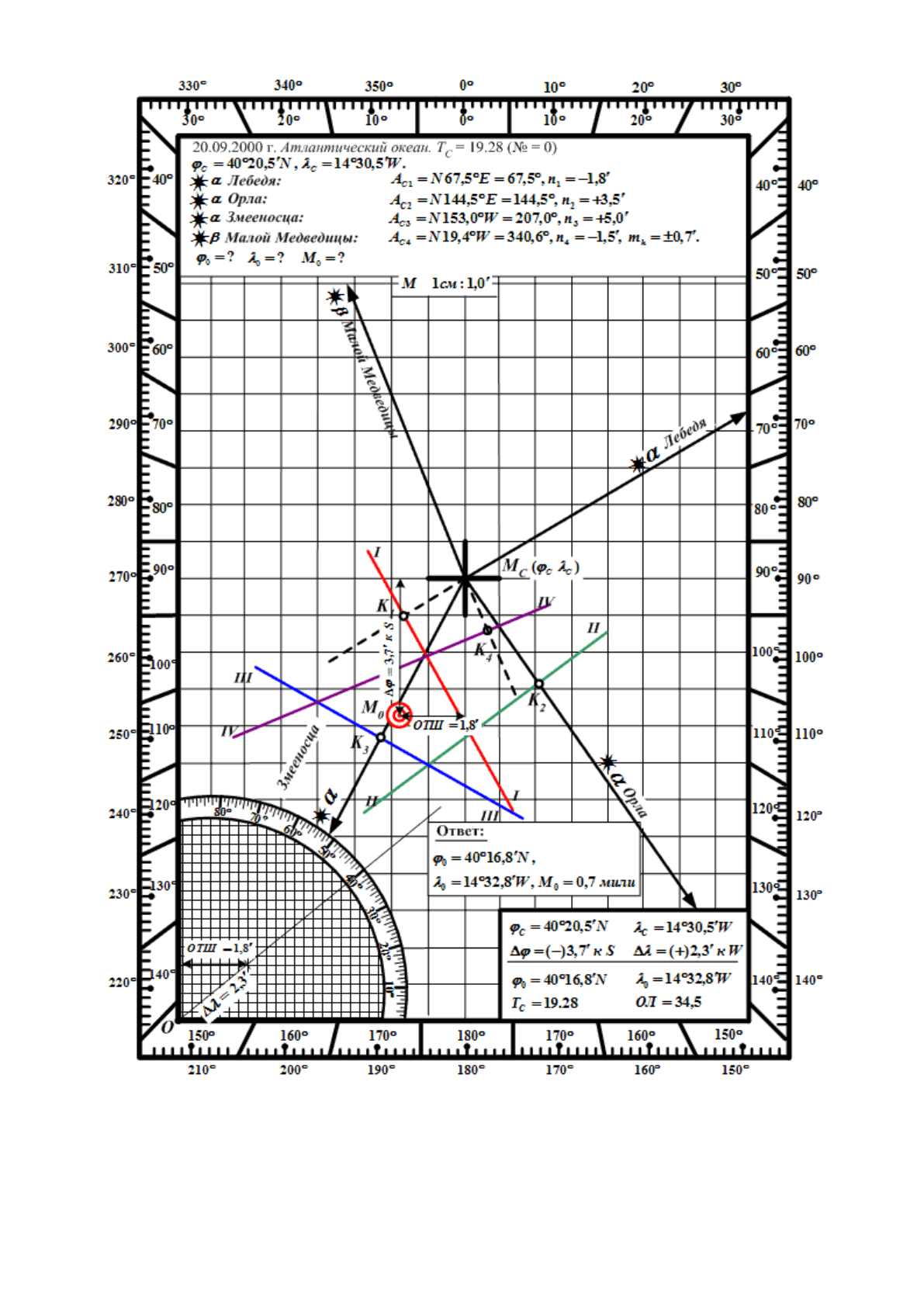
Рис.13.13. Расчет φ
0
λ
0
при четырех ВЛП (вариант)