Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.

непрерывную форму. Для выработки управляющего сигнала
должен выполнить некоторый объем вычислений, определя
его программой и отвечающий данному алгоритму и прння
численному методу. Эти вычисления должны быть выполне
течение времени т<7'. Величина т и требуемый объем вычис.т
определяют необходимое быстродействие MI I, который, ява
дискретным устройством, делает дискретной и всю систему
лом. В гракте автоматической системы, включающем МП.
сутствуют сигналы, квантованные по времени и по уровню,
сопровождается потерей информации, дополнительными ot
ками, обусловленными следующими факторами: потерей ни
мании вследствие квантования входною воздействия по врем
использованием численных методов для реализации в МГТ
ритмов (законов) управления, содержащих операции днффе
цирования и интегрирования; нсидеального процесса воестаи!
ления дискретных сигналов, вырабатываемых на выходе
эффектом квантования информации по уровню.
20.2. Задачи разработки и реализации МИС Э11
Специфика проектирования микропроцессорных ycipo
управления электроприводами заключается в том, что они о
сятся к классу цифровых систем автоматического управлег
Исследование и расчет таких систем представляет собой б
сложный и трудоемкий процесс по сравнению с проектирован
аналоговых систем непрерывного действия, что обуслон.ч
квантованием сигналов в цифровых системах по времени и
уровню. Вместе с тем разработчику микропроцессорных сие
управления необходима, помимо расчета цифровых конту
решать не менее сложные вопросы, связанные с выбором ст
туры системы управления и конкретных технических среде»
реализации, а также с разработкой соответствующего ал горит
ческою и программного обеспечения 13-13].
Проектирование сложной технической системы предпо г
ет расчленение се на некоторые функционально закончен!
подсистемы При этом для успешного выполнения проект»
работ важно уже на начальном этапе иметь общее предегавле
о структуре как системы в целом, гак и отдельных ее подсис
При использовании в системе микропроцессорных средств ва
установить взаимосвязь структуры с соответствующим адгор
мическим обеспечением.
Система управления промышленным электроприводом
общем случае должна обеспечивать:
*ем и интерпретацию команд, поступающих от человека-
Ы и/или управляющей системы более высокого уровня;
равленнс движением исполнительного механизма в соот-
\с заданной программой;
шрование команд на обслуживаемое приводом техно-
кос оборудование;
с>дь за выполнением технологической операции на
^технологическом модуле.
иностн проектирования электроприводов е микро-
процессорным управлением
| проектировании электроприводов с микропроцессорным
нем следует учитывать три группы особенностей.
Ввая связана с тем, что управление отдельными привода-
гея составной частью более общей задачи управления
в целом. Поэтому при построении исполнительного
Iреализующего управление электроприводами, нсобходн-
"ывать его взаимодействие с другими уровнями системы
1ня и, прежде всего, с тактическим уровнем При разра-
^ритмнческого обеспечения и его программной реали-
0 требует установления определенных правил обмена
1 так называемого протокола обмена, между иерархиче-
Йуровнями управления с учетом объема данных, последова-
И и времени их поступления. приоритетности и т.п.
1 определении законов управления электроприводами
ея характер изменения задающих воздействий на при-
'рмируемых на тактическом уровне Так. в силу сложно-
синя задачи планирования действий промышленного ро-
!Р) может оказаться, что сигналы задающих воздействий
от на исполнительный уровень с низкой частотой, не
«рявэщей требованиям к динамике приводов ПР [3-14].
и выборе аппаратных средств системы управления следу-
пнть потребности в объеме памяти и затратах процес-
времени, необходимых для реализации исполнительного
, и оценить возможность совмещения решения задач пда-
ня действий робота и управления его приводами на од-
)К или необходимость распределения этих задач на авто-
микропроцессорные модули
рая группа особенностей связана со спецификой проек-
ция исполнительного уровня системы (например, IIP) с
1н теории автоматического управления.
ПКА
Третья группа особенностей проектирования электрон
дов с микропроцессорным управлением связана с тем,
ройство управления приводом можно рассматривать как сп
лизированный микропроцессорный модуль. Это требует ре
вопросов выбора элементов базы и определения архитектур
дуля. В этом случае необходимо выбрать конкретный тип м
процессора, оценить потребности в объемах для хранения дли
и программ и подобрать соответствующие элементы постоя
и оперативной памяти. Кроме того, необходимо оргаиизоват
терфейсы для подключения к микропроцессорному мо
внешних устройств (исполнительных элементов привода, д
ков обратной связи, концевых выключателей и т.п.) и для и
чения самого модуля в вычислительную систему, в целом
зующую систему управления электроприводом. Наконец. *
ходимо создать и отладить программное обеспечение мик
цессорного модуля, соответствующее выбранным алгор
управления приводом.
20.3. Выпор сопряжения цпфрокой и аналоговой ча
системы управления
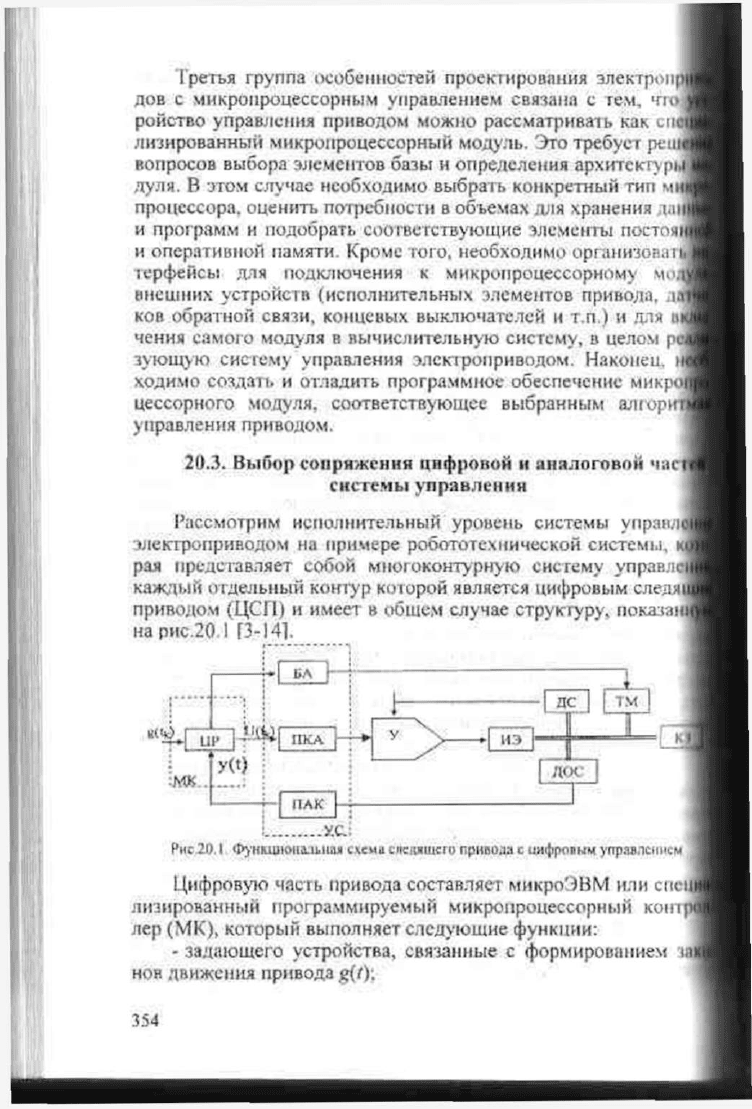
Рассмотрим исполнительный уровень системы управл
электроприводом на примере робототех ни ческой системы,
рая представляет собой многоконтурную систему управле:
каждый отдельный контур которой является цифровым следя
приводом (ЦСГ1) и имеет в общем случае структуру, показа!
на рис.20.1 [3-141.
L— хс.
Рис.20.1 Функциональна*
еми спешнцсго привода с иифролым управлением
Цифровую часть привода составляет микроЭВМ или сне
лизированный программируемый микропроцессорный конт
лер (МК), который выполняет следующие функции:
- задающего устройства, связанные с формированием
нон движения привода g(/):
.«тельного элемента привода, связанные с определе-
гласовання между заданием на привод #(/*) и его те-
ожением ></*);
вого регулятора (ЦР) положения или скорости, свя-
вычислепнем управляющего сигнала U(tобеспсчи-
обрабогку приводом заданного ему движения,
оговая часть привода включает в себя усилительно-
вательиый элемент (У), датчик главной обратной связи
исполнительный элемент (МЭ), состоящий из двигателя
;а и приводящий в движение управляемое данным при-
зматическое звено (КЗ) манипулятора. С помощью
корости (гахогенератора, фотоимпульсного датчика и
авливаемого на валу исполнительного двигателя, обра-
§Мпфирующая обратная связь по скорости,
яженне управляющей микроЭВМ с аналоговой частью
привода осуществляется в прямом контуре с помощью
вателя КОД-АНАЛОГ (ПКА). а в контуре обратной
£-помощью преобразователя АНАЛОГ-КОД (ПАК).
исимости от вида усилительно-преобразовательного
в качестве ПКА наиболее часто используются:
роаналоговые преобразователи (ЦАП). выполняющие
ванне цифрового кода управляющего сигнала в напря-
1етствующсй величины и полярности;
;разователн КОД-ШИМ, осуществляющие формиро-
^льсного сигнала с постоянной амплитудой и частотой,
'ванного но длительности в зависимост
и
от кода входно-
Ъеобразователи КОД-ЧИМ, формирующие на выходе им-
it сигналы постоянной амплитуды, частота следования
!
определяется значением входного цифровою кода
;разователь АНАЛОГ-КОД необходим лишь в случае
;ния в приводе аналогового датчика главной обратной
Ваибольшее распространение среди аналоговых получили
чзнные, фазовращательные и потенциометрические дат-
ри этом в первом случае физическая реализация ЦАК свя-
|Ьпределением сдвига между фазами аналоговых сигналов,
шшх из датчика в зависимости от угла поворота ИЭ, и
'ванисм его в унитарный или цифровой код. Во втором
применяют аналого-цифровые преобразователи (АЦП),
гюшие напряжение, снимаемое с потенциометра, в соот-
щий цифровой код.
Последнее время а качестве ДОС в электроприводах чаще
юг датчики дискретного типа (импульсные и кодовые),
не требуюшне применения ПАК и системе управления
означает, что полностью отпадает необходимость в устрой
сопряжения ДОС с управляющей микроЭВМ В этом случае
должны осуществлять согласование параметров сигналов с
со стандартом шины мнкроЭВМ (или МК) и при необхолн:
буферизацию данных, поступающих от ДОС.
Часто на выходных валах приводов промышленных pi
устанавливаются тормозные муфты (ТМ), позволяющие ж
фиксировать положение выходного вала привода. Угтранл
такими муфтами осуществляется дискретными сигналами с
мощью специального блока электроавтоматики (ПА).
Наиболее существенной особенностью расематривае
привода является наличие в его контурах управления иифо
ции как аналогового, так и цифрового вида. При провсденн
женерных расчетов приводов со встроенными мнкропроиес
мн приходится учитывать также специфические эффекты,
квантование сигналов по времени и по уровню, »гто обусло
наличием цифровой части в системе управления приводом,
мс того, в системе появляется запаздывание, вызванное конеч
временем вычислений, производимых в микропроцессорном
ройетве. Возможно также, что в цифровой части прнсутст
различные сигналы с разной скоростью. Такую цифровую ci
му необходимо рассматривать как многочастотную, т.е. и
щую цифровые контуры, функционирующие с различными
риодами д искретноетн
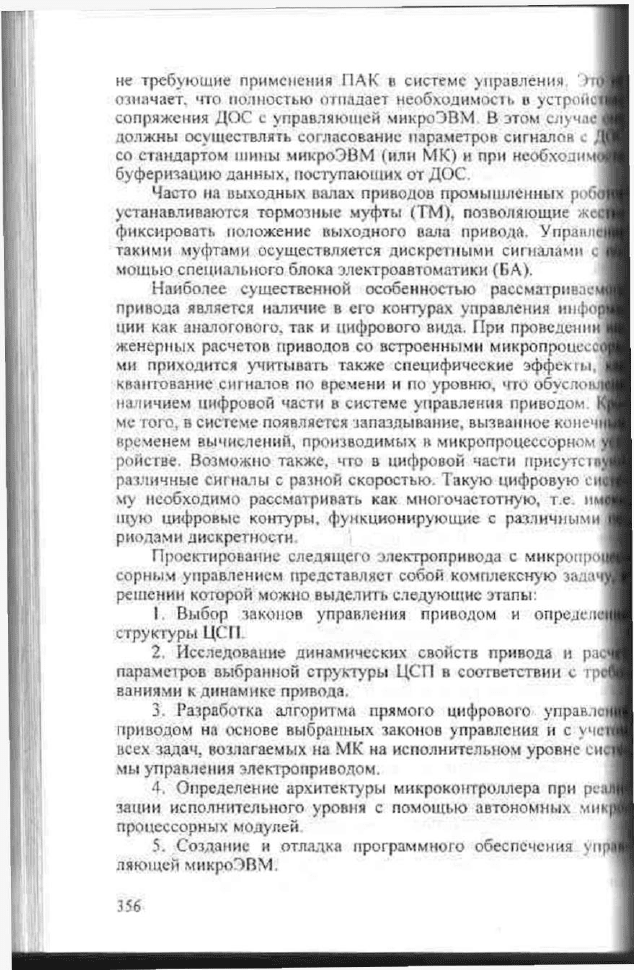
Проектирование следящего ;>лектропривода с микропр
сорным управлением представляет собой комплексную зада"
решении которой можно выделить следующие этапы:
1. Выбор законов управления приводом и определ
структуры ЦСН.
2. Исследование динамических свойств привода и ра
параметров выбранной структуры ДСП в соответствии с г
ваннями к динамике привода.
3. Разработка алгоритма прямого цифрового управла
приводом на основе выбранных законов управления и с уч
всех задач, возлагаемых на МК на исполнительном уровне си
мы управления электроприводом.
4. Определение архитектуры микроконтроллера при ре
зации исполнительного уровня с помощью автономных ми
процессорных модулей
5. Создание н отладка программного обеспечения ум
ляющей мнкроЭВМ.
-.'80В
щ21. Пример разработки микропроцессорной системы
1енни электроприводом постоянного гока с подчинен-
ным регулированием координат
рГехничеекие данные рассматриваемого электропривода
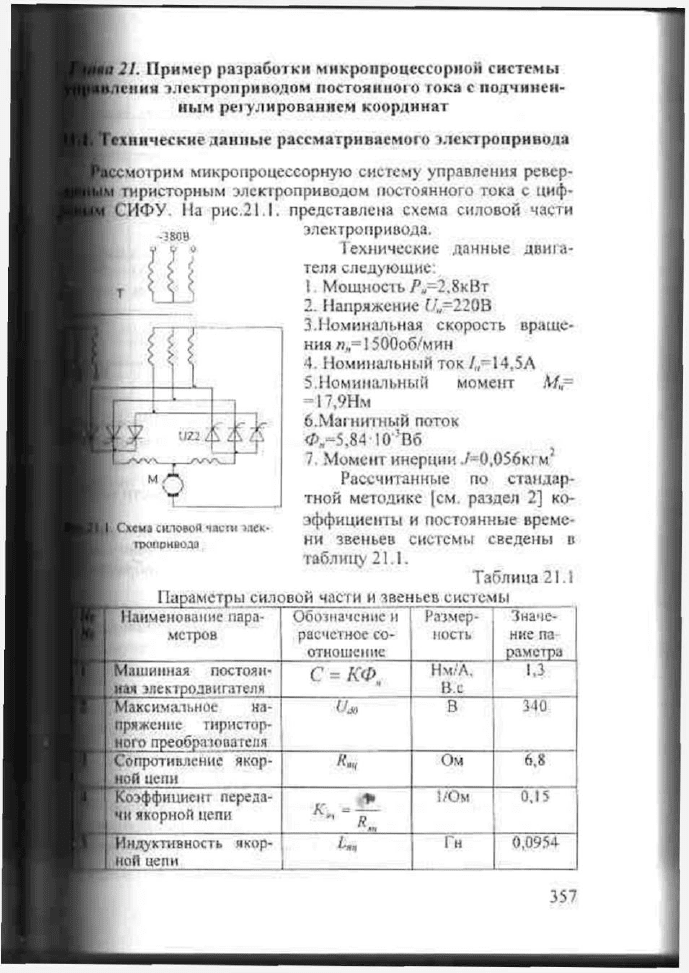
смотрим микропроцессорную систему управления ревер-
§1 тиристорным эдскгроприводом постоянного тока с циф-
'ИФУ. На рис.21.1. представлена схема силовой части
электропривода.
Технические данные двига-
теля следующие:
I Мощность Д=2,8 к Вт
2. Напряжение U
u
-220В
3.Номинальная скорость враще-
ния л„=1500об/мин
4. Номинальный ток /,,~14,5А
5. Номинальный момент JV/„=
E
j—= 17,9Нм
U 6.Магнитный поток
5,84 Ю'Вб
7. Момент инерции 7=0,056KIM
J
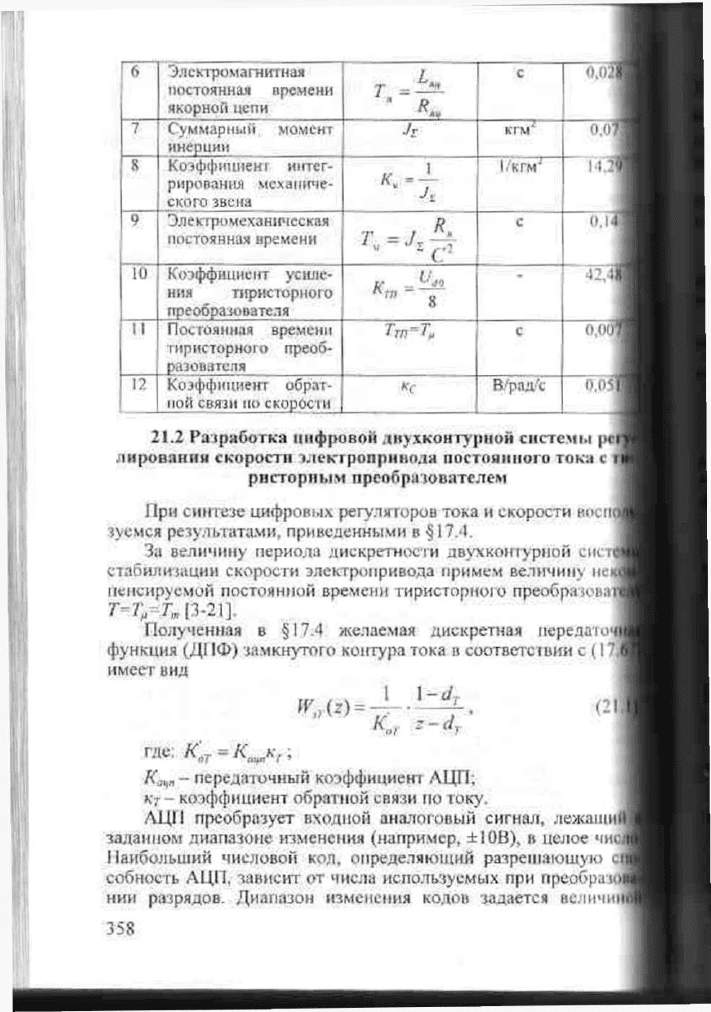
Рассчитанные по стандар-
тной методике [см. раздел 2] ко-
эффициенты и постоянные време-
ни звеньев системы сведены в
таблицу 21.1.
Таблица 21.1
К
Схема силовой
мает >лек«
[ лхшркйода
Параметры силовой части и звеньев системы
[Наименование пара
метров
{Машинная постоям-
электродвигателя
Sfai
акекмзльное на-
•яженпе гиристор-
го преобра човатепя
сопротивление якор-
цепи
>эффицис1гг переда-
ми якорной цепи
[Индуктивность якор-
ной цепи
Обозначение и
расчетное со-
отношение
С = КФ
Размер-
ность
Нм/Л,
В.с
Значе-
ние па
раметра
1/Ом 0,15
Гн 0,0954
Электромагнитная
постоянная премени
якорной цепи
Т =
0,0
Суммарный
инерции
момент
Коэффициент интег-
рирования механиче-
ского звена
I >'КГМ*
0.0
ТО
9
То"
тг
12
Электромеханическая
постоянная времени
Т
=
/ А
ц 1
С'
Коэффициент уенле-
ния тиристорного
преобразователя
А'
0.1
42,
"оТу
Ж
Постоянная времени
тиристорного преоб-
разоввтепя
Коэффициент обрат-
ной связи но скорости
*с
В/рад'с
21.2 Разработка инфровон лнухконтуриой CIICTCMI.I ре
лированнм скорости электропривода постоянного тока с !
р и сто р
н
ы м и р ео б р а зовате л ем
При синтезе цифровых регуляторов тока и скорости воем
зуемся результатами, приведенными в §17.4.
За величину периода дискретности двухконгурной сис
стабилизации скорости электропривода примем величину не
иенсируемой постоянной времени тиристорного преобразова
Т-Т^т
т
(3-21].
Полученная в §17.4 желаемая дискретная передаю
функция (Д11Ф) замкнутого контура тока в соответствии с (1
имеет вид
Кг
(21
где: К,
т
= К
11ЦП
ы
{
;
Kjijn
- передаточный коэффициент ЛЦП;
Кт - коэффициент обратной связи по току.
ЛЦП преобразует входной аналоговый сигнал, лежат и
заданном диапазоне изменения (например, ±10В), в целое мн
Наибольший числовой код, определяющий разрешающую
собность ЛЦП, зависит от числа используемых при преобраз'
нии разрядов. Диапазон изменения кодов задается величин
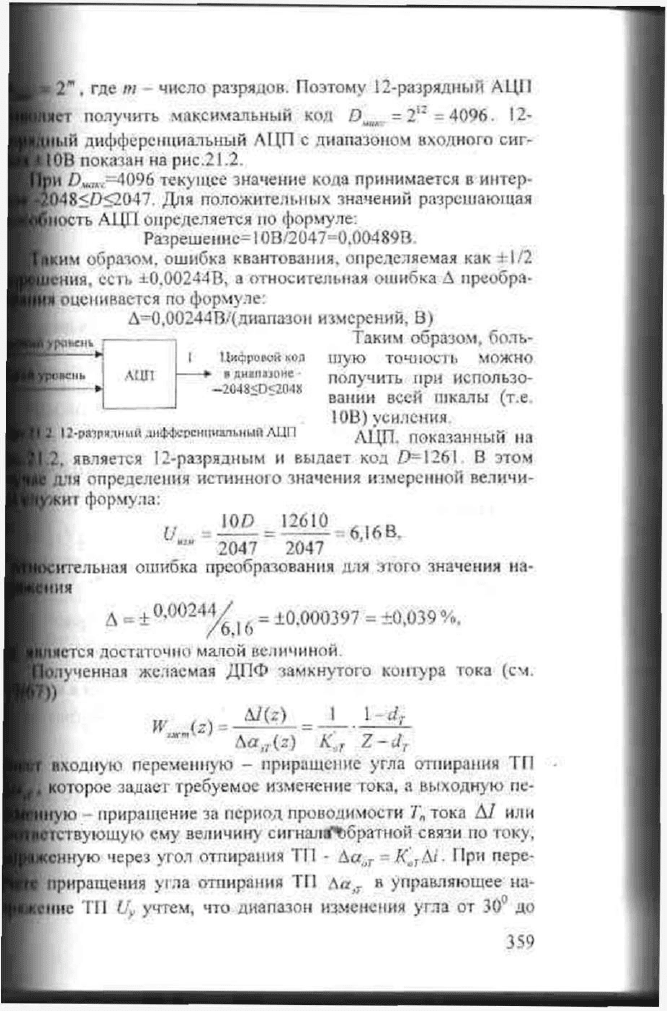
12", где m число разрядов. Поэтому 12-разрядный АЦП
получить максимальный код = 2" = 4096. 12-
\ дифференциальный АЦП с диапазоном входного сиг-
I показан на рис.21.2.
I ZW=4096 текущее значение кода принимается в интер-
Ф8<Я<2047. Для положительных значений разрешающая
сть АЦП определяется но формуле.
Разрешение-10В/2047=0.00489В.
образом, ошибка квантования, определяемая как ±\/2
ция. есть ±0.00244В, а относительная ошибка Д преобра-
Р оценивается по формуле:
Д=Ю,00244В/(диапазон измерений, В)
Таким образом, боль-
Цифроюйкол шую точность можно
получить при использо-
вании всей шкалы (т.е
10В) усиления
НИЗ-ршрялныйджМсрсжпипьнийАЦП дщ показанный на
является 12-разрядным и выдает код D^
1261
В этом
1'1Я определения истинного значения измеренной величи-
Кит формула:
__1О0
=
1261О
2047 2047
ельная ошибка преобразования для этого значения на-
к
диншиоие
-
—2048<D<2fHX
Д = ± 0,00244/
= ±0
.000397 = ±0,039 %,
'6,16
истся достаточно малой величиной,
ученная желаемая ДПФ замкнутого контура тока (см.
=
M(z) _ 1 I-d
T
Aa,,{z) K
uT
Z-d
f
иодную переменную - приращение угла отпирания ТГ1
которое задает требуемое изменение тока, а выходную пе-
ую приращение за период проводимости 7'„ тока AI или
гвующую ему величину сигналЛюратной связи по току,
иную через угол отпирания ТП - Ьа„
т
= К'
лТ
Ы- При пере-
рнращения угла отпирания ТП \a
f7
в управляющее' на-
вмие ТП и
у
учтем, что диапазон изменения угла от 30° до
180 является квазилинейным. Примем этот диап
(р, - 150° 2,61 рад. В этом диапазоне изменение угла унравл
справедливы следующие соотношения.
Uj = Oleosa
Uj - , откуда
U,
= —8 И 2,4В;
220
а = агссо:
4
и.
2-12,4
- агссо:
•s| ] = 49,33" = 0,86 |рзл.
(0.861 -1,57) = 8,83В.
2,62
При С/.-8В. Uj - 340 0,647 - 220 В.
<0,
яг
а =
2 2U
В соответствии с (17.63)
у
2 12.4 '
339,8 .
1,57-0.106*/
3,4
sin a =s 100 sin a
При a = 30' = 0,5236 рад, K
am
- 50Л/рад,
2
'
62
</„
2 12,356
1
При Да = 0,26рад, а = 1,57 -
А/У, =2,462 В.
при
тока
I
^ена младшего разряда цифрового преобразования в копт
I 43 5
= = 0,0106
4095 4095
К
лип
=0.106
I
= 10.
0,0106
Итак, ДПФ замкнутого контура тока принимает вид
Ко, z-d.
1,4 z-e
-I *
b d
r
- e = e~
l
, так как 7*принято равным Т
и
.
Ф регулятора тока имеет вид (см. 17 70)
I-d
r
z-
I
0.007
"0.021»
= e
R. 1-е
i
4
.
3.4
z-
I
up}
Z — I
1-е"
3,4
42,5 0,14
= 1,633-
ц» w «^-ам
Xre
отрим теперь цифровой контур регулирования скоро-
/рная схема которого приведена на рис 17.16.
•контура скорости лг^—0,051.
ичине й=0,867рад соответствует код 2047.
р Да-0.186рад Л U
y
~ 1,19В
С
157
=
0,0385:
I
4095 4095
= 26: К.
АЦП
= 0,106
•
26 = 2,756.
§17.4 рассматривается два случая синтеза цифрового кон-
эсти: настройка контура скорости на модульный опти-
); настройка контура скорости на оптимум, подобный
чному с фильтром на входе (СО).
рвом случае при настройке на МО имеем ДПФ цифрово-
го контура скорости (17,78)
фрового регулятора скорости (17.76)
Го гч-0^/,)'
Jfc dy, d\ и di вычисляются по формуле (17.75) и имеют сле-
1е значения
d
{
= 2е'°
7
cos Д/' = -2е~* cosW = -1,509;
d^ = е~
<2
"'
т
=в"
г
=0.606: