Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.

При подъеме груза момент трения учитывается коэффиш
том полезного действия:
А/. + А/
•
, тогда М
с
= А/, + А/ =
М, G Д.
При спуске груза А/, - Л/, - Л/
я
П
отсюда
Ъ rj
где: Мс. АС* - моменты
сопротивления па валу двигателя от
груза и трения соответственно.
Значение кпд зависит от нагрузки, зави-
(г - G
симость rj = /(—- ), дана в [4-12].
Из формулы (23.14) следует, что
при спуске груза, когда M
mfl
>А/, и //<0,5
двигатель работает в силовом (двига-
тельном) режиме.
При M
f
» А'/„,„ М
v
прн спуске
груза можно определить по формуле
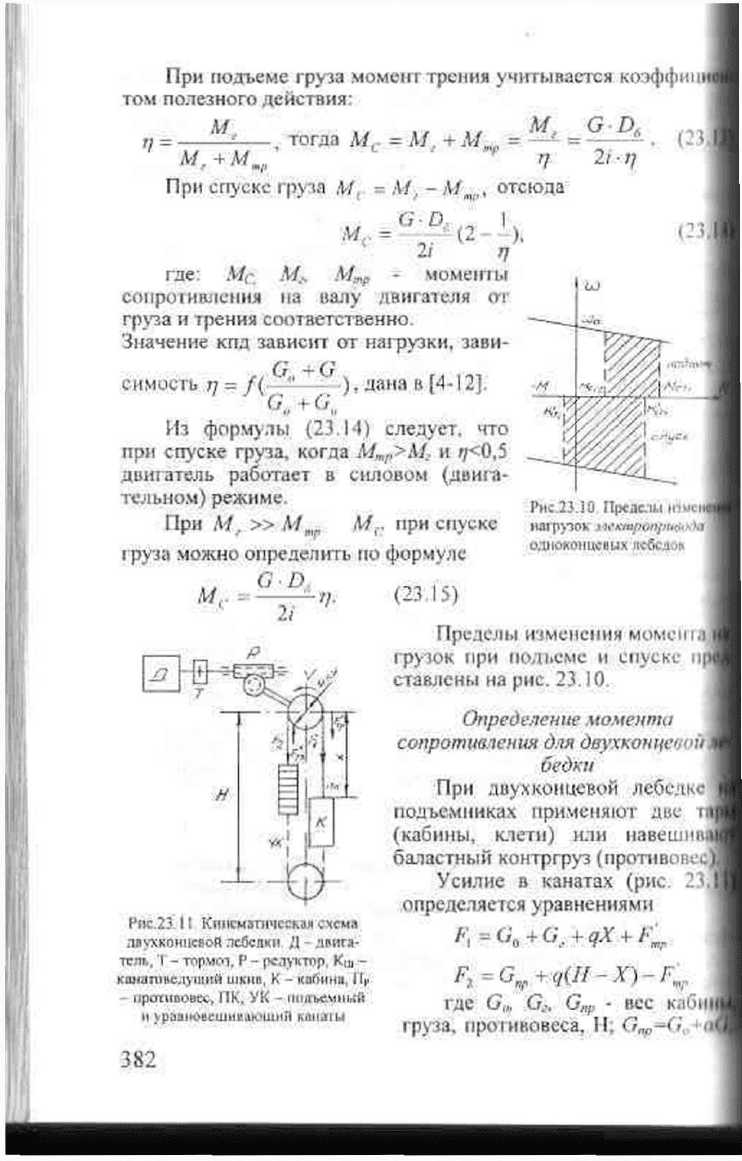
Рис.23.30 Пределы
ID
«С I
нагрузок у\\'ктрЩ>и^)л ]
однокоицевш иебедок
(23 15)
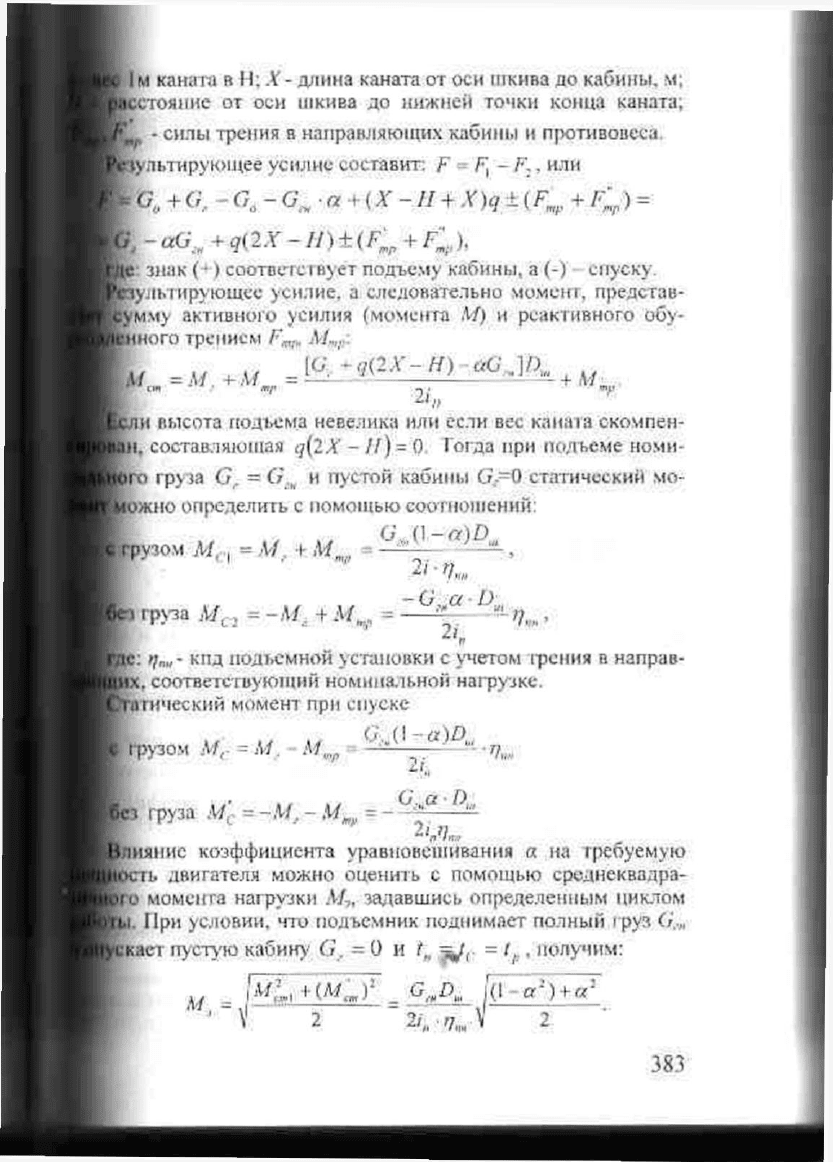
Рис.23 11 Киисмзтичсскан схема
лпухконисаой лебедки Д - двига-
тель,
T
- тормсо.
Р
- редуктор.
Кш
-
каштшелушнй шкнп,
К
- кабина, Ир
противовес, ПК, УК - пидъемный
и урашн>»сшивйЮШиП
канал ы
Пределы изменения момента
грузок при подъеме и спуске п(
ставлены на рис. 23.10.
Определение момента
сопротивления для двухкощевои
бедки
Прн двухконцевой лебедке
подъемниках применяют две т1
(кабины, клети) или навешш
баластный контргруз (противовес)
Усилие в канатах (рис. 23.]
определяется уравнениями
F
x
=G
0
+G,
+
qX
+
F
mr
F
l
=
GfVI
+<
/
(If-X)-r„
r
где G„, G* G„p - вес кабнм
груза, противовеса, И; (7
п
„-6'„< а
каната в И; Х- длина каната от оси шкива до кабины, м;
гоянис от оси шкива до нижней точки конца каната.
Ц - силы трения в направляющих кабины и противовеса
'льтирующее усилие составит: F /•] - F
z
, или
Ро
+
О, - G
0
- G„ •« +
(ЯГ
- Я + X)q±{ F
np
+ ) =
знак ) соответствует подъему кабины, а (-) спуску,
ультирующес усилие, а следовательно момент, представ-
£умму активного усилия (момента М) и реактивного обу-
ого трением
F„
;
,.
Л/,,..:
+ М:
ШГ
т
Г -); -г
1и высота подъема невелика или если вес капа
га
скомпен-
«. составляющая q{2X - //) = 0 Гогда при подъеме номи-
груэа G, -
Су
И пустой кабины G.-=0 статический мо-
:но определить с помощью соотношений:
груза М
С2
= - Л/. + М^ =
-G„a А.
2/
кпд подъемной установки с учетом фения в направ-
IX, соответствующий номинальной нагрузке,
гтвтический момент при спуске
i ,,
u
I Грузом Л/, = М. - \1„
р
— Tf
ltN
... ,, .. G..a
•
Д.,
|ез груза М
с
=-М,-\4
ту
=- а.
iлияиие коэффициента уравновешивания а на требуемую
ь двигателя можно оценить с помощью среднеквадра-
5"о момента нагрузки Л/,, задавшись определенным циклом
. При условии, что подъемник поднимает полный груз G..„
каст пустую кабину G. = 0 и t
h
= I. , получим:
м = =
д. [о сг
:
)-ы/'
' V 2 2/
•
7 V 2
Оптимальное значение при котором М, минимален
дет а™,=0,5.
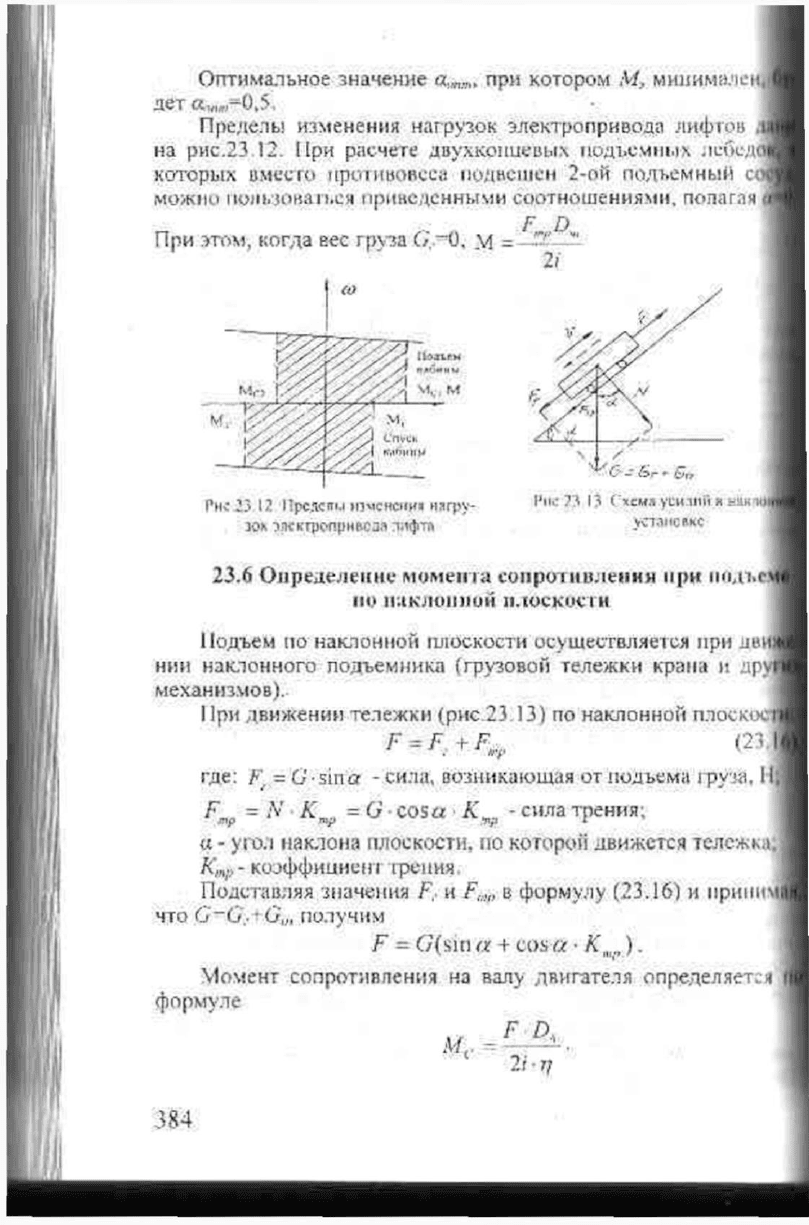
Пределы изменения нагрузок электропривода лифтов ,1
на рис.23 12. При расчете двухкониевых подъемных лебеде
которых вместо противовеса подвешен 2-ой подъемный со
можно пользоваться приведенными соотношениями, полагая
F D
При этом, когда еес груза С/.
-
0, _М =—*'
2 i
23.6 Определение момента сопротивлении при нодъ
по наклонной плоскости
Подъем по наклонной шюскости осуществляется при дв1
нни наклонного подъемника (грузовой тележки крана и др^
механизмов).-
11ри движении тележки (рис.23.13) по наклонной плоское!
F=F.+F
"Г
где: F. - G-sinа - сила, возникающая от подъема груза, II
F
np
= N К
тр
= G
•
cos и К^ - сила трения;
a - угол наклона плоскости, по которой движется тележм
К
т
р- коэффициент фения.
Подставляя значения F- и F
(llf>
в формулу (23.16) и принт
что G-G/-G,,, получим
F - (/(sin (х + со на
•
К
тп
).
Момент сопротивления на валу двигателя определяется
формуле
1
2 iii
Рис 23 12 Прсдспм изменения нагру-
зок элскгрс-прн&сла пафтп
Рис 73 13 Схем» усилии
и
ншг
vCMiiortkc
11ЭЛ1.ГМ
С'пуки
№1011II
рсделенне моментов сопротивления от силы негра
сопротивлении от давления ветра для механизмов пе-
ня и поворота определяется из выражения
F = Р
.
S
'к 'и '"л
1
/V- ветровое давление (Н'м
:
); для кранов, работающих
Ытом воздухе, принимается равным 150-250Па;
S„,
- пар-
усности машины, м*.
идь парусности машины может быть найдена из выра-
К,„ - коэффициент сплошности конструкции, численно
J.3...0.6 для ферм и 0,7...0.8 для механизмов; S,- пло-
аничениая контуром конструкции и груза,
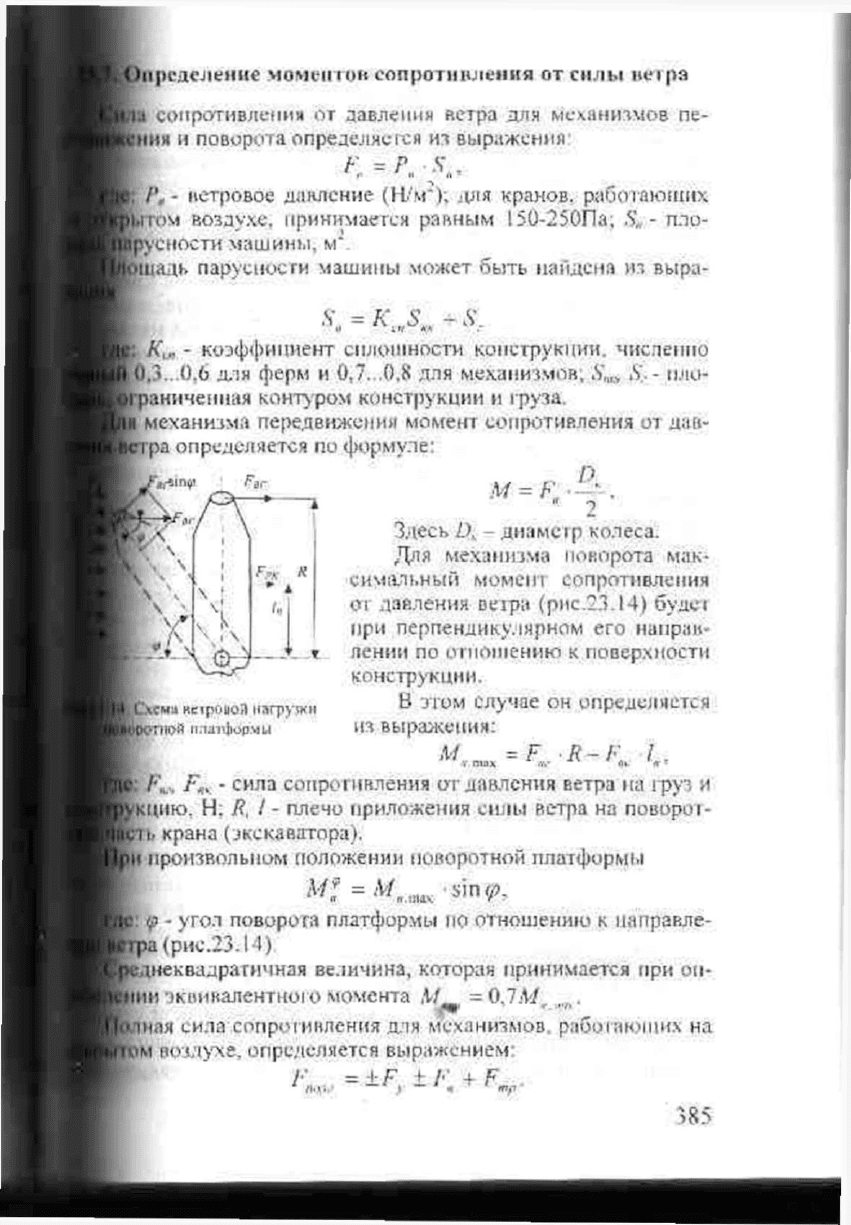
р механизма передвижения момент сопротивления от лав-
ра определяется по формуле:
К
А
* ,Л.
щ 9
F?K К
' *
t,
гми Kcipouoa нагрузки
иоЯ iinanJiopMU
Здесь /А - диаметр колеса.
Для механизма поворота мак-
симальный момент сопротивления
от давления ветра (рис.23.14) буде!
при перпендикулярном его направ-
лении по отношению к поверхности
конструкции.
В этом случае он определяется
из выражения:
F*y - сила сопротивления от давления ветра на груз И
дню, Н: R, / - плечо приложения силы ветра на поворо!-
ь крана (экскаватора).
произвольном положении поворотной платформы
м: = л*„.«« '«in^
<р
- угол поворога платформы по отношению к иаправле-
(рис.23.14).
днеквадратичная величина, которая принимается при оп-
экнивалентного момента ,1=
17l
.
ая сила сопротивления для механизмов, работающих на
м воздухе, определяется выражением:
/•' . =+
F.
±F + F
wy
.
) « Фу
23.8. Динамические н уларные нагрузки и способы их о
ниченни
Динамические нагрузки возникают при изменении скс
движения механизма в результате управляющих или вочм
щих воздействии.
Ударные нагрузки возникают после выборки зазоров в
даче, а также в результате соприкосновения рабочего ор
обрабатываемым материалом или с препятствием.
Динамические моменты определяются величиной ннор£
ных масс, приводимых в движение. Порядок расчета днж
ских моментов определяется кинематической схемой меха»
Здесь различают жесткие кинематические схемы, в когоры
роеть каждого звена схемы однозначно связана со скорость
электродвигателя, и кинематические схемы, в которых из-
личня упругих элементов и зазоров, такая жесткая связь от
вует. В первом случае динамическая система рассматривас
г
одномассовая с приведением моментов инерции врашакл
частей машины и поступательно движущихся масс к валу
тродвитателя. Во втором случае механическая система par
ривается как многомассовая (чаще двухмассовая).
Для динамической системы динамический момент эл
привода при заданном ускорении
£
^ —, которое обычно
dt
ниченО технологическими условиями, может быть опредег
сеют ношения:
у
=
, ^
(2
- dt '
J
m
yZ
где: ./ =./ - + —— - суммарный приведенный м
инерции, включающий в себя моменг инерции ротора двш
(./
д
.) и приведенный момеггт инерции всех вращателыю
и поступательно движущихся масс установки (wKj/.
J
Для большинства механизмов основную долю в момен
составляет моменг инерции двигателя J
z
= (1,2...1,5)У
н
.
В подъемных установках с двухконпевой лебедкой сум
ный момент инерции .Д. превышает момент ипериии двигат
2... 10 раз [4-121. гак как момент инерции определяется су
(J
£ся масс т =
rn „
+ т,
х
+ m,
Jr
+ т,. где m^.m^.n^.w, -
кгтственио противовеса, подъемного сосуда (кабины),
цьемного и компенсационного канатов
санизмов передвижения и поворота кранов и для меха-
роворота экскаваторов момент инерции движущихся масс
|ть в 2...20 раз больше инерции двигателя. Поэтом) для
ншзмов при большой частоте включения именно дина-
нагрузки могут определять необходимую мощность
(Я
гдача динамических усилии вызывает допо.тиигельные
редукторе, которые желательно в расчетах учитывать,
цмические нагрузки передач соизмеримы со сгатически-
;вышают их.
погерь в редукторе производится при определении ди-
tHx моментов, приведенных к валу двигателя, пугем де-
кпд редуктора (при пуске) или умножения (при гормо-
проектировании электропривода в некоторых случаях
щмо учитывать зазоры в передачах, так как после нмбор-
>в, возникают ударные нагрузки, которые по своей вели-
превышать пусковые моменты двигателя Особенно
;ится к механизмам с большими инерционными массами
Иными числами. Например, при изношенном зубчатом
Механизма поворота экскаватора зазор может достичь
>рота вала двигателя, а дня механизма поворота башеи-
2...3 оборота двигателя За счет возникающих в ре-
удара механических колебаний максимальная нагрузка в
I возрастает в сравнении с той. которая имела бы место
гкой связи масс и отсутствии зазоров Отношение макси-
нагрузки к средней называют динамическим коэффипн-
(ннамнческая нагрузка передачи определяется ускорени-
шод выбора зазоров и соотношением приведенных инер-
масс двигателя и механизма. Если за время выборки за-
гатель достигнет установившейся скорости, го ударная
при окончании выборки зазора будет тем больше, чем
[скорость двигателя
шческие решения по ограниченииj динамических момен-
тов и механически перегрузок
и ограничения ударных моментов при выборке зазора для
^привода с параметрическим (реостатным) пуском иреду-
Нваюг одну-две предварительные реостатные характери-
с тики, обеспечивающие возможность снижения пусков
мента до (0.4...0,6)Мс для выбора зазоров и слабины канат
этом шунтирование сопротивления по мере разгона (тормо
осуществляется, как правило, в функции тока или времени.
Наиболее полно ограничение динамических и ударш
гру зок можно осуществить в случае использования регул ир
электроприводов с системами автоматического управлет
таких электроприводах для ограничения динамических и
ных момент
£Р ЗУ
-пгггь
At
PC
пользуют 11
ки интенсив
ЗИ.
Задатчик
сивности из
скорость по
ному закону,
постоянным
II»
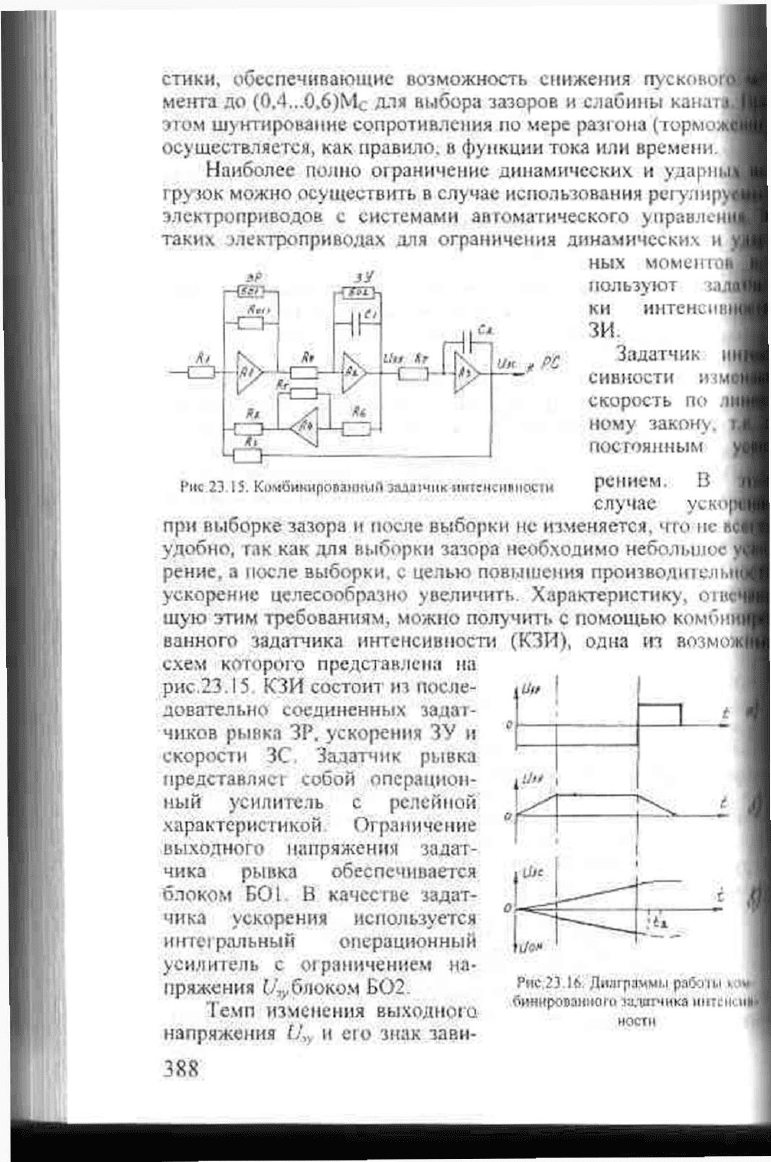
hw.23.lS. КомбмкнропзшшП здшчик ннтемсшшасш
рением. В
случае ус ко
при выборке зазора и после выборки не изменяется, что не в
удобно, гак как для выборки зазора необходимо небольшое
рение, з после выборки, с целью повышения производитель
ускорение целесообразно увеличить. Характеристику, от
щую этим требованиям, можно получить с помощью комби
ванного задатчикл интенсивности (КЗИ), одна из возмо:
схем которого представлена на
рис.23.15 КЗИ состоит из после-
довательно соединенных задат-
чиков рывка ЗР. ускорения ЗУ и
скорости ЗС Задатчик рывка
представляет собой операцион-
ный усилитель с релейной
характеристикой Ограничение
выходного напряжения задат-
чика рывка обеспечивается
блоком Б01 В качестве задат-
чика ускорения используется
интсч ральный операционный
усилитель с ограничением на-
пряжения Цу блоком В02.
Темп изменения выходного
иit j
—I *
И
1
| liit
с
jit.
напряжения Ц> и его знак завн-
Рие,23.1& Диаграммы ра&з'гы •
бинированмоги эадпгчмка
ШПЙНСН
ностн
Величины и знака напряжения рывка U
J()
. Задатчик скоро-
:е собран по схеме интегратора, поэтому те Ми и направ-
ененпя его выходного напряжения U
T
, зависят or значе-
ярносги U
iy
Структурная схема и диаграмма изменения
ти выходного напряжения КЗИ приведены на рис.23.16.
5мя нарастания £/„ определяется из выражения / = —,
I
Р
; а, р - ускорение и рывок (м/с* и м/с )
[замкнутых системах регулирования с суммирующим уси-
как правило, применяют токовые отсечки, а в системах
;ного регулирования используют ограничение задания
r
j(напряжение на выходе регулятора скорости). Ограниче-
а достигается также применением задатчика интененвно-
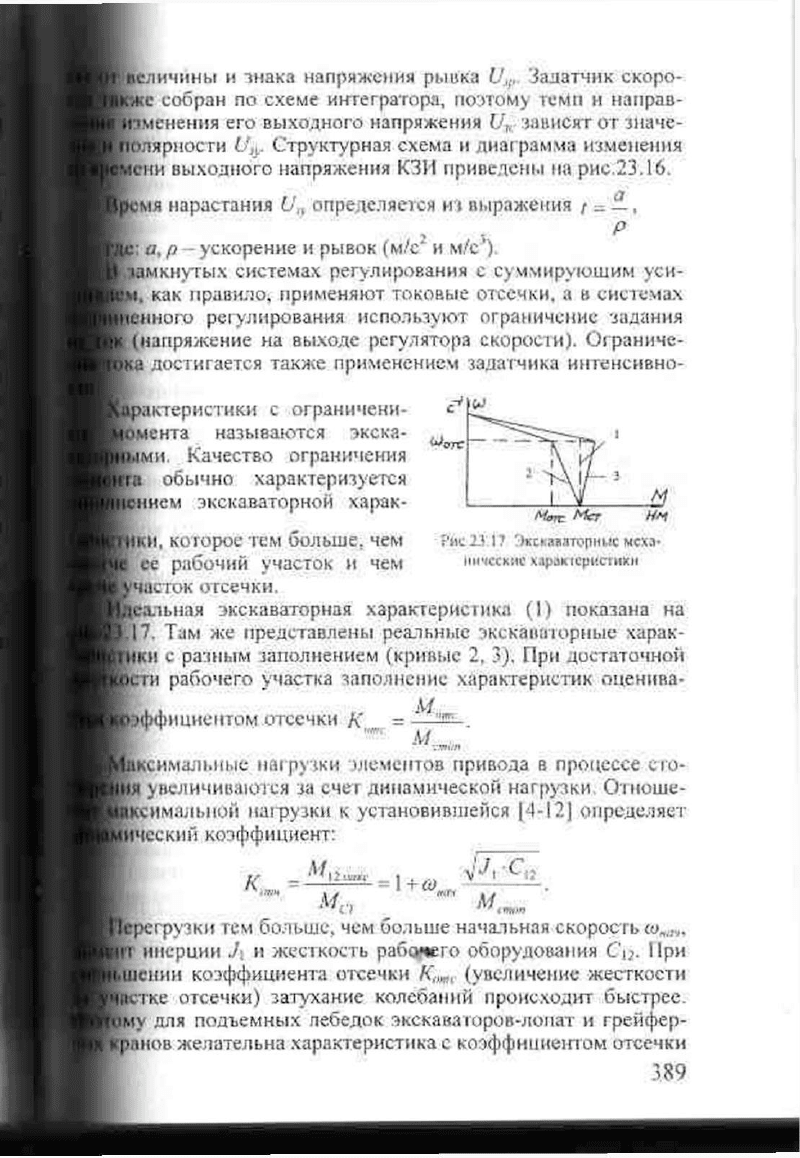
чстеристнки с ограннчени-
?ента называются экска-
ш. Качество ограничения
la обычно характеризуется
:нем экскаваторной харак-
^отс —^Г -
Мщс Мст
ИМ
?йс23 1? 'Ьсскавлторнис мехл*
11НЧССКИС
чаршперкегмхм
си, которое тем больше, чем
се рабочий участок и чем
чисток отсечки.
1льная экскаваторная характеристика (1) показана на
|17. Там же представлены реальные экскаваторные харак-
1ки с разным заполнением (кривые 2, 3). При достаточной
ги рабочего участка заполнение характеристик оценива-
лщиситом отсечки А* =
М..
М
;имальиые нагрузки элементов привода в процессе сго-
ним
увеличиваются за счет динамической нагрузки От ноше-
гимальпой шнрузки к установившейся J4-12J определяет
'ический коэффициент:
ts
м
а
=
1
+
м.
грузки тем больше, чем больше начальная скорость co„
/rt
,
и инерции J\ и жесткость рабочего оборудования СИ. При
снин коэффициента отсечки K
mi
(увеличение жесткости
ке отсечки) затухание колебаний происходит быстрее,
му для подъемных лебедок экскаваторов-лопат и грейфер-
нов желательна характеристика с коэффициентом отсечки
Ера
0,7..Д8. Такая форма экскаваторной характеристики од»
меино уменьшает частоту стонорсннй, гак как обеспечив
благовременные снижения скорости при механической пере
ке еще до достижения стопорной нагрузки. Прн этом по с и
кию скорости машинист оценивает нагрузку двигателя и
временно предпринимает действия, направленные на умеш.и
перегрузки, например уменьшение напорного усилия экск
pa-лопаты при перегрузке электропривода подъема.
Уменьшение пускового момента при двухмассовой ме
ческой системе достигается, как и прн жесткой связи, уме»
нисм ускорения (замедления), а снижение амплитуды кол
после завершения пуска (торможения) можно получить ;
путями; первый способ - принимают время пуска равным п
ду собственных колебаний механической системы, втор
демпфированием колебаний с помощью регулирования
ж •
сти механической характеристики электропривода.
Время пуска регулируется двумя способами- с помощь
датчика интенсивности и ограничением тока электродвига
помощью САР. В первом случае, ввиду жестких мехднич
характеристик двигателя, считается, что груз подвешен к же
опоре, и колебания определяются, исходя из закона коле
материальной точки, подвешенной на гибкой нити. Частота
бодных колебаний определяется следующими формулами
а период колебаний и соответствующее ему время разгон
формуле:
При ограничении тока CAP жесткость механической ча
теристикн /?=0 и частота свободных колебаний системы он
лястся по формуле:
а период колебаний T
Wfn
а следовательно время разгона, по (
муле (23.19).
После определения времени разгона (торможения) опрел
ется средний пусковой (тормозной) момент и ток:
(2
=и.
r
he М- - момент сопротивления: j*- - суммарный приведен-
(эмент инерции системы, кг.м*. ш„ - номинальная скорость
двигателя.
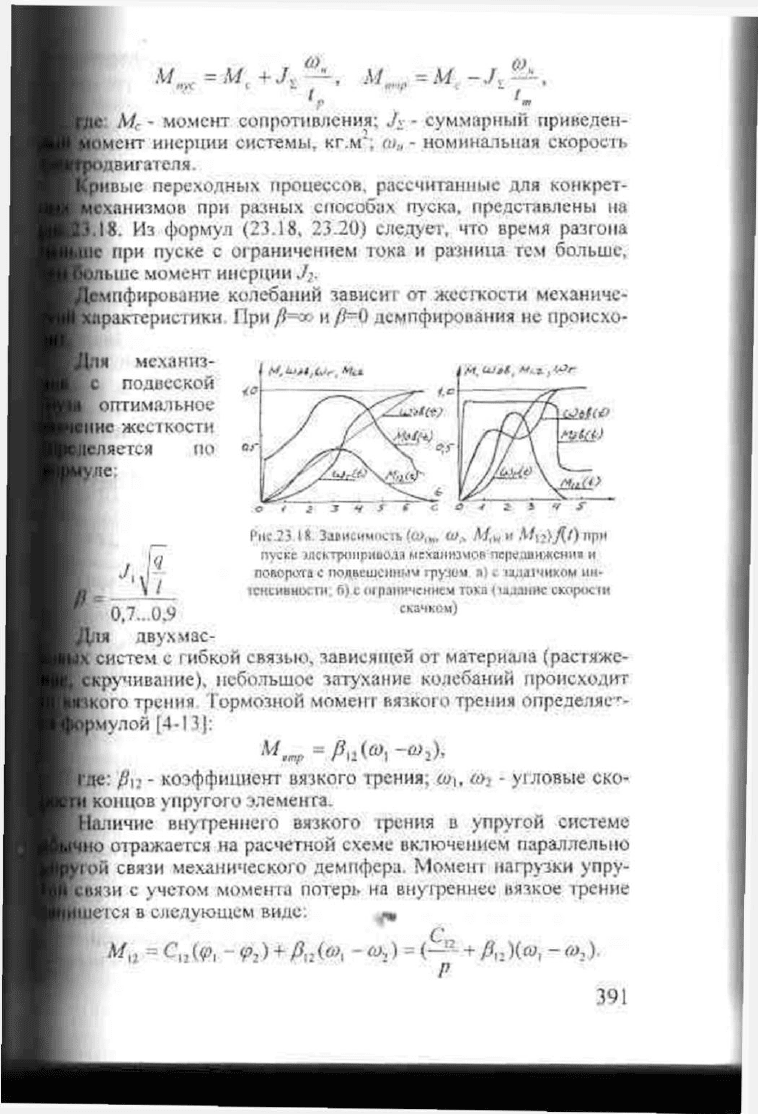
•вые переходных процессов, рассчитанные для конкрет-
Нвханизмов при разных способах пуска, представлены на
Ш. Из формул (23.18, 23.20) следует, что время разгона
le при пуске с ограничением тока и разница тем больше,
3»ше момент инерции J
пфирование колебаний зависит от жссгкости механиче-
ристики При /?=ог--
и
/?=0 демпфирования не происхо-
дя механиз-
ме подвеской
| оптимальное
жесткости
^яется по
*лс
АГ.
~
ы
Pitc.23.lft. Зааисимисть
(<*>,*,
(о
л
A/,
W
" Л/»при
пуске злсктриирИййДа механизмов'лсредиижнив и
поворота с подвешенным грузом а)» чадлчиком ни-
iCHCHBHOf.n».
fi)
с
ограничением
тока
( иианис скорист
скачким)
•
Ж 0,7...0,9
|/1пя двух мае -
систем с гибкой связью, зависящей от материала (растяже-
Екручиваиие), небольшое затухание колебаний происходит
ого трения Тормозной момен
т
вязкого трения определяе
г
-
иулой [4-131:
=
Ai(»i
Где: //и - коэффициент вязкого трения; aj\,
а>
}
- у1ловые ско-
концов упругого элемента,
ичие внутреннею вязкого грения в упругой системе
отражается на расчетной схеме включением параллельно
й связи механического демпфера. Момент нагрузки упру-
зи с учетом момента потерь на внутреннее вязкое трение
тся в следующем виде: ^
С г