Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
290
where
ii
vq
=
are the components of the velocity (as a matter of fact, they are the
contravariant components, but we do not use this notion, neither the corresponding
notations) in the frame of reference specified by the basis’ vectors
i
e . The modulus of
the velocity is given by
2
ij i j
vgqq= ,
(5.1.8')
where we use the formula (A.1.37) of the element of arc.
Taking into account the notations (A.1.40), we may write
3
1
iii
i
Hv
=
=
∑
vi, vers
ii
=
ie,
(5.1.9)
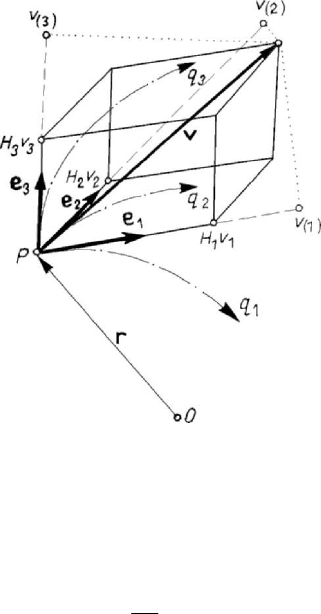
Figure 5.2. Velocity of a particle in curvilinear co-ordinates.
11
Hv
,
22
Hv
,
33
Hv
being the physical components of the velocity v (Fig.5.2).
Analogously, the orthogonal projections of the velocity
v on the basis’ vectors
i
e will
be given by
()
i
i
v =⋅vi, hence by (without summation for 1, 2, 3i
=
)
3
()
1
ij
i
i
j
j
g
vv
H
=
=
∑
.
(5.1.10)
In the case of orthogonal curvilinear co-ordinates
0
ij
g
=
,
ij
≠
, so that (without
summation for
1, 2, 3i = )
()
ii
i
vHv
=
; (5.1.11)
Kinematics
291
hence, the orthogonal projections of the velocity are the physical components of it. If
the frame of reference is orthonormed, then
123
1HHH
=
==, obtaining again the
components (5.1.4').
1.1.3 Important particular cases
In spherical co-ordinates, we obtain
rr
vvv
ϕϕ
θθ
=
++vi i i
, (5.1.12)
where
r
vr= , vr
θ
θ=
, sinvr
ϕ
θϕ
=
,
(5.1.12')
taking into account the results in App., Subsec. 1.1.5; the modulus of the velocity is
given by
2222222
sinvrr rθθϕ=+ +
.
(5.1.12'')
Analogously, in cylindrical co-ordinates we may write
rr zz
vvv
θθ
=
++viii, (5.1.13)
where
r
vr= , vr
θ
θ=
,
z
vz
=
,
(5.1.13')
the modulus of the velocity being given by
22222
vrr zθ
=
++
;
(5.1.13'')
in particular, in polar co-ordinates (in the plane
12
Ox x
), we have
rr
vv
θθ
=+vi i,
r
vr
=
,
vr
θ
θ=
(5.1.14)
and
2222
vrrθ
=
+
,
(5.1.14')
corresponding to the results in App., Subsec. 1.1.2.
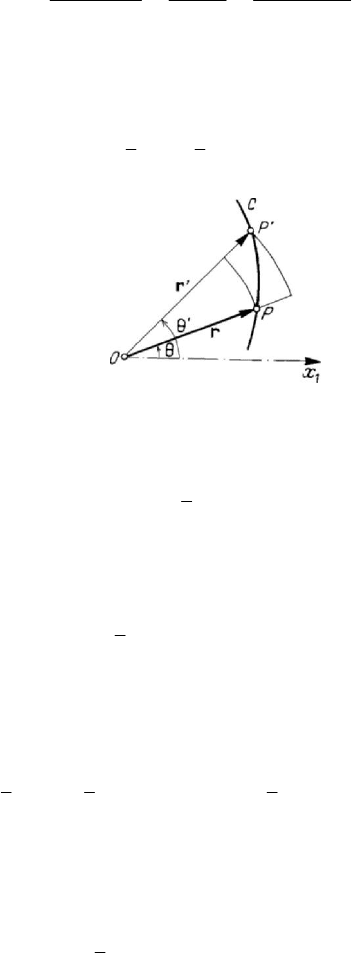
1.1.4 Areal velocity
In the case of a plane trajectory
C
, we may define a quantity of the nature of a
velocity, which characterizes the variation of the sectorial area between two vector radii
and the arc of the trajectory, when the particle
P
describes the latter one. Let thus be
the sectorial areas
A and A
′
at the moments
t
and t
′
, respectively. Noting that
(Fig.5.3)
MECHANICAL SYSTEMS, CLASSICAL MODELS
292
()
()
()
()
22
22
rr
AA
tt tt tt
θθ θθ
′′′
′
−−
−
<<
′′ ′
−− −
and passing to the limit for
tt
′
→ , we obtain the areal velocity
AΩ
=
(in the plane
12
Ox x ), given by
2
11
22
rrv
θ
Ωθ==
.
(5.1.15)
Figure 5.3. Areal velocity of a particle.
Vectorially, we have
3
1
2
Ω
=
=×irvΩ ,
(5.1.15')
where we took into account
r
r
=
ri,
3
r
θ
×
=ii i and the first formula (5.1.14); it
follows also that
()
12 12
1
2
xx xxΩ =−
.
(5.1.15'')
If the trajectory
C
is a tortuous curve, we may consider formulae of the form
(5.1.15'), (5.1.15'') for the projections of the particle
P
on the three co-ordinate planes.
We introduce thus the areal velocity
11
22
ii
Ω=×=×=
rv rr iΩ
,
1
2
j
ijk k
xxΩ =∈
,
(5.1.16)
which characterizes the variation of the area of the sector between two vector radii on
the lateral surface of the cone of vertex
O and directrix C .
In particular, if
const==
J
JJJJG
CΩ , then we may write
1
() 0
2
⋅
×=⋅=rrv Cr ;
hence, the trajectory
C is a plane curve, which passes through the origin O of the co-
ordinate axes. In the case of a vanishing areal velocity (
=
C0), the velocity v has the
same direction as the position vector
r , the trajectory being rectilinear.
Kinematics
293
We notice that one can introduce the torsor of the velocity
v with respect to the pole
O in the form
{}
() ,2
O
τ
=vv
Ω
.
(5.1.16')
1.2 Acceleration of the particle
We define – in the following – the acceleration of a particle, by introducing the
velocity hodograph; we calculate the acceleration in curvilinear co-ordinates and in
some particular cases of co-ordinates. We introduce accelerations of higher order too,
as well as the acceleration of a discontinuous motion.
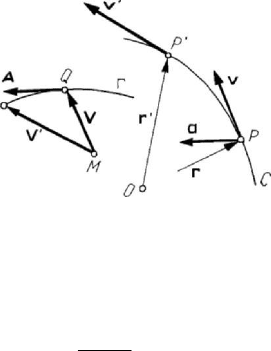
1.2.1 Velocity hodograph. Acceleration
Let M be an arbitrary pole at which we apply the vector V , equipollent to the
velocity vector
v ; if the particle P describes the trajectory C , then the extremity Q
of the vector
V describes a curve Γ , called the velocity hodograph (Fig.5.4).
Observing that
MQ =
J
JJJG
V
plays the rôle of a vector radius, it results that the velocity by
which the point
Q
is moving on the curve Γ is the velocity of the velocity of the
particle
P , equipollent to the acceleration a (introduced in Chap. 1, Subsec.1.1.5),
which is invariant with respect to a change of a fixed frame of reference.
Figure 5.4. Hodograph of velocity.
Let
P
and P
′
be two positions of the particle on the trajectory
C
. We introduce the
mean acceleration
mean
tt
′
−
=
′
−
vv
a
;
(5.1.17)
the instantaneous acceleration (acceleration at the point
P
) becomes
mean
lim
tt
′
→
=
aa. (5.1.17')
Taking into account the velocity hodograph, we may write
=
=
avr; (5.1.18)
MECHANICAL SYSTEMS, CLASSICAL MODELS
294
the acceleration, applied at the point
P , is thus the derivative of the velocity with
respect to time or the second derivative of the position vector with respect to time.
The components of the acceleration in orthogonal Cartesian co-ordinates are
expressed in the form
iii
avx
=
=
, 1, 2, 3i
=
, (5.1.18')
i
x being the accelerations of the projections of the point P along the three axes of co-
ordinates. The modulus of the acceleration is given by
ii ii ii
aaa vv xx===
.
(5.1.18'')
Starting from (4.1.7'), we obtain, by differentiation,
d
d
vv vvs
s
=+=+
a
τ
τττ ,
wherefrom
av
τ
=
,
2
v
a
ν
ρ
= , 0a
β
=
,
(5.1.19)
so that
aa
τν
=
+a
τ
ν , (5.1.19')
taking into account the first formula of Frenet (4.1.10). The component of the
acceleration along the binormal vanishes, hence the acceleration is contained in the
osculating plane. The modulus of the acceleration may be written in the form
4
2
2
v
av
ρ
=+
.
(5.1.19'')
We notice that, in the case of a uniform motion (
constv
=
), the tangential
acceleration vanishes; if
consta
τ
=
, then the motion is uniformly varied (uniformly
accelerated or uniformly decelerated as
a
τ
and v have the same sign or are of opposite
signs). The normal acceleration (the acceleration
a too) is directed always towards the
interior of the trajectory (towards the centre of curvature), being centripetal (
0a
ν
≥ );
it vanishes only at the inflection points of the trajectory or in the case of a rectilinear
motion (
1/ 0ρ = ). If the acceleration vanishes (
=
a0, 0aa
τν
=
= ), the motion of
the particle is rectilinear and uniform. Starting form the areal velocity (5.1.16), we may
define the areal acceleration in the form
11
22
ii
Ω=×=×=
ra rr iΩ ,
1
2
ij
ijk k
xxΩ =∈
;
(5.1.20)
Kinematics
295
in this case, the torsor of the acceleration with respect to the pole
O is given by
{
}
() () ,2
OO
τ=τ=
ava
Ω
.
(5.1.20')
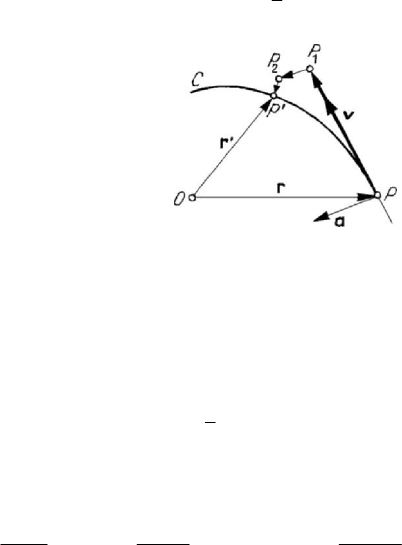
1.2.2 Approximation of the motion of a particle in the neighbourhood of a given
position. Deviation
Let P and P
′
be two positions of a particle, corresponding to the moments t and
t
′
, respectively. Assuming that the function ()tr is of class
2
C , we may use the
formula (A.1.20) of Taylor type in the form
2
1
( ) () ( )() ( ) () (, )
2
ttttttttttt
′′ ′ ′
=+− +− + −
rr r rη ,
Figure 5.5. Deviation of a particle.
where
(, )tt t
′
−η represents the rest. We can thus approximate the motion of the
particle
P in the neighbourhood of the point P by
1122
PP PP P P P P
′
′
=+ +
J
JJJG JJJJG
J
JJG JJJJG
(Fig.5.5), with
1
()()PP t t t
′
=−
J
JJG
r ,
2
12
1
()()
2
PP t t t
′
=−
J
JJJG
r ,
2
(, )PP t t t
′′
=
−
J
JJJG
η
;
(5.1.21)
for a fixed
t , we may write
1
d
()
d
PP
t
t
=
′
J
JJG
r
,
12
d
()()
d
PP
ttt
t
′
=−
′
J
JJJG
r
,
2
12
2
d
()
d
PP
t
t
=
′
J
JJJG
r
.
(5.1.21')
We can thus state
Theorem 5.1.1. The continuous motion of a particle P may be approximated, at a
given moment
t , in a neighbourhood of first order (the segment PP
′
J
JJJG
), by a rectilinear
and uniform motion along the tangent at
P to the trajectory, where the velocity is
equal to the velocity of the particle at
P . As well, in a neighbourhood of second order
(the segments
1
PP
J
JJG
and
12
PP
J
JJJG
), the motion can be approximated by a succession of two
rectilinear motions: the motion previously presented, to which a uniform varied motion
with the acceleration of the particle at
P is added.

MECHANICAL SYSTEMS, CLASSICAL MODELS
296
The time interval
tt
′
− is very small in a vicinity of first order; in a vicinity of
second order, this interval is somewhat greater, but still small, so that the segment
2
PP
′
=
J
JJJG
η is negligible. The vector
12
PP
J
JJJG
is called deviation; its rôle is to bring back
the particle
P from the tangent (on which it moves if it is not acted by a force,
according to the principle of inertia) on the trajectory
C .
1.2.3 Acceleration of a particle in curvilinear co-ordinates
Starting from the expression (5.1.8) of the velocity, by differentiation, one obtains
2
,
j
jjjj
kjkk
jj
k
qq q qq q
qq q
∂∂
=+=+
∂∂ ∂
rr
aee
.
(5.1.22)
Noting that
jj
kk kkj
aag⋅= ⋅=ae e e ,
ij i
kj k
gg δ
=
,
we may write
[]
,
,
il il il il
ijjjij
lljk k l k
ag gqq gqq jklgqq=⋅=⋅ +⋅ =+ ae e e e e ,
using the notations introduced in App., Subsec.1.1.5, where
[
]
,jk l is Christoffel’s
symbol of first species. With the aid of Christoffel’s symbol of second species (A.1.45),
we may write the components (contravariant components) of the acceleration in the
frame
i
e in the form
ii j
k
i
aq qq
jk
⎧⎫
⎪⎪
=+
⎨⎬
⎪⎪
⎩⎭
, 1, 2, 3i
=
.
(5.1.22')
The physical components of the acceleration are
11
aH
,
22
aH
,
33
aH
, while the
orthogonal projections of the acceleration on the basis’ vectors
i
e are written in the
form (without summation with respect to
1, 2, 3i
=
)
3
()
1
ij
j
i
i
j
g
aa
H
=
=
∑
.
(5.1.23)
In the case of orthogonal curvilinear co-ordinates, we have (without summation with
respect to
1, 2, 3i = )
()
ii
i
aHa
=
, (5.1.23')
so that the orthogonal projections of the acceleration are its physical components. For
an orthonormed frame of reference (
123
1HHH
=
==) we find again the
components (5.1.18').

Kinematics
297
Using a method due to Lagrange, we can calculate the components of the
acceleration also in a movable system of curvilinear co-ordinates, given by
(
)
123
,,;qqqt
=
rr .
(5.1.24)
We have
jjj
j
qq
qt
∂
∂
=
+= +
∂∂
rr
ver
,
wherefrom
j
jj
qq
∂
∂
=
=
∂∂
vr
e
;
then
dd d
dd d
i
ii i
tq t q tq
∂∂ ∂
⎛⎞ ⎛⎞
⋅= ⋅ = ⋅ −⋅
⎜⎟ ⎜⎟
∂∂ ∂
⎝⎠ ⎝⎠
vr r r
ae v v
.
We notice that
22
d
d
j
iji i
q
tq qq tq
∂∂ ∂
⎛⎞
=+
⎜⎟
∂∂∂ ∂∂
⎝⎠
rr r
,
22
j
iij i
q
qqq qt
∂∂ ∂
=+
∂
∂∂ ∂∂
vr r
;
because the vector function
r is of class
2
C , it follows
(
)
dd
dd
iii
tq q q t
∂∂∂
⎛⎞
==
⎜⎟
∂∂∂
⎝⎠
rv r
,
so that the operators
d/dt and /
i
q
∂
∂ are permutable. Finally, we get (covariant
components of the acceleration)
22
d1d1
d2d2
i
ii ii
vv
tq q tq q
∂
∂∂∂
⎛⎞
⎛⎞
⋅= ⋅ −⋅ = −
⎜⎟
⎜⎟
∂
∂∂∂
⎝⎠
⎝⎠
vv
ae v v
,
wherefrom
22
1d
2d
ij
i
j
j
vv
ag
tq q
∂∂
⎡⎛ ⎞ ⎤
=−
⎜⎟
⎢⎥
∂∂
⎣⎝ ⎠ ⎦
, 1, 2, 3i
=
,
(5.1.25)
obtaining thus Lagrange’s formula.
MECHANICAL SYSTEMS, CLASSICAL MODELS
298
1.2.4 Important particular cases
Taking into account the results in App., Subsec. 1.1.5, we obtain, in spherical co-
ordinates,
rr
aaa
ϕϕ
θθ
=
++ai i i, (5.1.26)
with
222
sin
r
arr rθθϕ=− −
,
()
22 2
1d
2 sin cos sin 2
d2
r
ar rr r
rt
θ
θθ θθϕ θ θϕ=+ − = −
,
()
22
1d
sin 2 sin 2 cos sin
sin d
arrr r
rt
ϕ
θϕ θϕ θθϕ θϕ
θ
=+ + =
.
(5.1.26')
Analogously, in cylindrical co-ordinates, we get
rr zz
aaa
θθ
=
++aiii
, (5.1.27)
where
2
r
arrθ=−
,
2ar r
θ
θθ=+
,
z
az
=
.
(5.1.27')
In particular, in polar co-ordinates, in the plane
12
Ox x , we may write
rr
aa
θθ
=+ai i,
2
r
arrθ=−
,
()
2
1d
2
d
ar r r
rt
θ
θθ θ=+ =
.
(5.1.28)
1.2.5 Accelerations of higher order
As we have seen in Chap. 1, Subsec. 1.1.4, the derivatives of higher order of the
position vector are invariant with respect to changes of a fixed frame of reference; these
derivatives are identified with the derivatives of the acceleration
a
, which will be
called acceleration of first order (
()
1
=
aa). We obtain thus accelerations of higher
order: the acceleration of second order (
()
2
=
=
aar), the acceleration of third order
(
()
3
==
aar) and – in general – the acceleration of nth order, given by
()
11
11
dd
dd
nn
n
nn
tt
−+
−
+
==
ar
a
.
(5.1.29)
Although the accelerations of higher order do not intervene directly in the Newtonian
model of mechanics, which needs only the acceleration of first order, one considers that
some mechanical phenomena (collisions, seismic phenomena, etc., which take place by
a rapid variation of the intensity of the force) may lead to other mathematical
modelling, in which these accelerations play an important rôle.

Kinematics
299
Starting from formulae (5.1.19), (5.1.19'), which give the acceleration of first order
with the aid of its intrinsic components (along Frenet’s trihedron axes), and using
Frenet’s formulae (4.1.10), (4.1.10'), we get
()
() () ()
22 2
2
aaa
τν
β
=++
τ
ν
β
a
,
(5.1.30)
where
()
3
2
2
v
av
τ
ρ
=−
,
()
2
2
2
3
vv
av
ν
ρ
ρ
ρ
=−
,
()
3
2
v
a
β
ρρ
=−
′
.
(5.1.30')
We notice that the acceleration of second order has a component along the binormal
too, which vanishes only in the case of a rectilinear trajectory or, more general, of a
torsionless trajectory (in the osculatory plane). The acceleration of second order along
the principal normal vanishes (for a curvilinear trajectory) if
3
0
3
0
v
v
ρ
ρ
= ,
(5.1.31)
where
0
ρ and
0
v correspond to the moment
0
tt
=
(for instance, in the case of a
uniform circular motion).
Obviously, the acceleration of second order may be introduced also with the aid of
the hodograph of the acceleration of first order.
1.2.6 Acceleration in case of a discontinuous motion
In the case in which the position vector is a continuous function on
[
]
,tt
′′′
, while
the velocity and the acceleration are continuous on the same interval, excepting a finite
number of moments
[
]
,
i
ttt
′
′′
∈
, 1,2,...,in
=
(piecewise continuous), to which
correspond discontinuities of the first species, that is
(
)
(
)
00
ii
tt−≠ +vv,
(
)
(
)
00
ii
tt
−
≠+aa,
(5.1.32)
it is necessary to use methods of the theory of distributions. The integrals
()d
t
t
tt
′′
′
∫
v , ()d
t
t
tt
′′
′
∫
a
(5.1.33)
do exist in these conditions.
Taking into account the formula (1.1.51), we may write
()
2
2
22
1
d() d()
dd
n
ii
i
tt
tt
tt
=
=+δ−
∑
rr
V
,
(5.1.34)