Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.


MECHANICAL SYSTEMS, CLASSICAL MODELS
300
(
)
(
)
00
ii i
tt=+−−Vv v ,
1,2,...,in
=
,
(5.1.34')
represents the jump of the velocity, corresponding to the moment of discontinuity
i
tt= , while the sign “tilde” is for the derivative in the usual sense; we may thus state
Theorem 5.1.2. The acceleration of a particle in the sense of the theory of distributions
is equal to the distribution defined by the acceleration of the particle in the usual sense,
where the latter one exists, to which is added the sum of the products of the velocity
jump, of the particle by the Dirac distribution.
We introduce the notations
2
2
d()
()
d
t
t
t
=
r
a
,
2
2
d()
()
d
t
t
t
=
r
a
,
()
1
()
n
c
ii
i
ttt
=
=δ−
∑
aV,
(5.1.34'')
where
()ta is the acceleration in the sense of the theory of distributions, ()t
a is the
acceleration in the usual sense, while
()
c
ta is the complementary acceleration due to
the discontinuities. With these notations, the relation (5.1.34) becomes
() () ()
c
tt t
=
+
aaa.
(5.1.34''')
The acceleration in the sense of the theory of distributions will be called generalized
acceleration too.
1.3 Particular cases of motion of a particle
We consider, in what follows, some particular cases of motion: the rectilinear
motion, the circular motion, the parabolic motion, the helical motion, as well as the
cycloidal motion.
1.3.1 Parabolic and rectilinear motion
We consider the particular case
0
const==
J
JJJJG
aa ; integrating, we get
(
)
00 0
tt=− +vav,
() ()
2
00 000
1
2
tt tt
=
−+−+ravr
,
(5.1.35)
where we have supposed that
0
=
vv and
0
=
rr at the initial moment. We notice that,
taking a new origin of the frame of reference at
0
=
rr, nothing of the generality of the
trajectory is lost; the position vector
r is thus a linear combination of the constant
vectors
0
v and
0
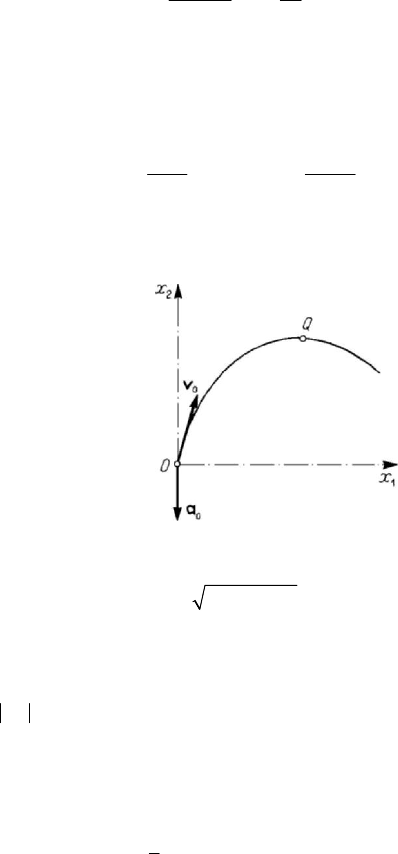
a , hence, it belongs to a fixed plane, so that the trajectory is a plane
curve. We suppose that the trajectory is contained in the plane
12
Ox x ; we may thus
write the parametric equations in the form (Fig.5.6)
()
0
0
11
()xt v t t=−,
() ()
2
00
00
22 2
1
()
2
xt a t t v t t=−+−
,
(5.1.35')
where
Kinematics
301
where, for the sake of simplicity, we take the
2
Ox -axis along the acceleration
0
a .
Eliminating the time
t , we get
()
00
22
2
211
0
2
0
1
1
2
av
xxx
v
v
=+
;
(5.1.36)
hence, the trajectory is a parabola, the axis of which is parallel to the acceleration
0
a ;
the vertex
Q of the parabola is of co-ordinates (we notice that
0
1
v ,
0
2
0v > ,
0
2
0a < )
00
12
1
0
2
vv
x
a
=−
,
()
2
0
2
2max
0
2
2
v
x
a
=−
,
(5.1.36')
and is obtained by the particle at the moment
00
0
22
/tt va=− . We may write
Figure 5.6. Parabolic motion of a particle.
00
222max
2vax=− ,
(5.1.37)
obtaining thus Torricelli’s formula, which gives the component
0
2
v of the initial
velocity of the particle which attains the ordinate
2max
x , assuming an acceleration of
modulus
0
0
2
a=−a . These results stay at the basis of studies on external ballistics.
In the particular case in which
0
1
0v
=
, the motion is rectilinear; if we assume that
the motion is along an
Ox -axis, then the second relation (5.1.35') allows to write the
equation of motion (which is – at the same time – the horary equation) in the form
()()
2
00 000
1
() ()
2
xt st a t t v t t x== −+ −+
,
(5.1.38)
where we put into evidence the initial position (eventually another one that the origin
O ); there results
(
)
000
()vt a t t v
=
−+.
(5.1.38')
MECHANICAL SYSTEMS, CLASSICAL MODELS
302
If
0
0a
=
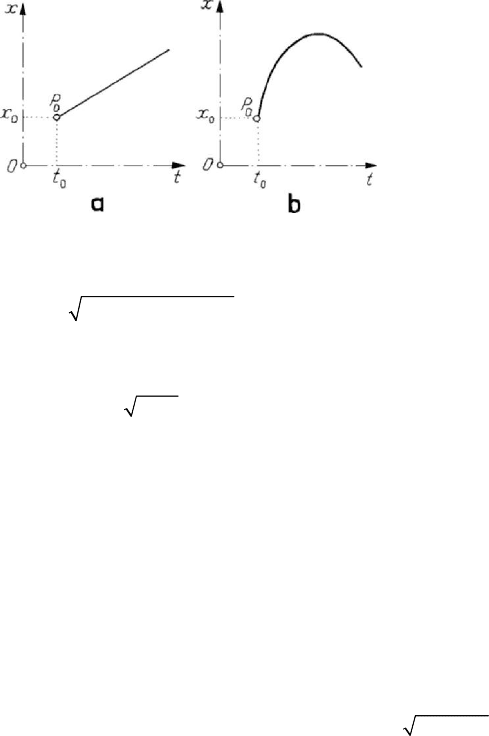
, then the motion is uniform and the diagram of motion is given in
Fig.5.7,a. As a matter of fact, the reciprocal implication is also true; indeed, if
0
=a0,
then
0
=vv,
(
)
000
tt
=
−+rv r,
(5.1.39)
the trajectory being a straight line. If
0
0a
≠
, then the motion is uniformly varied;
eliminating the time
t between the relations (5.1.38), (5.1.38'), we obtain Torricelli’s
formula in the form
Figure 5.7. Diagram of a rectilinear motion of a particle: uniform (a)
and uniformly varied (b).
()
2
00 0
2vvaxx=+ −;
(5.1.40)
in particular, if the particle has not initial velocity at the origin
O , then we get
0
2vax= .
(5.1.40')
If, for a certain interval of time, the velocity and the acceleration have the same
direction, then the motion is accelerated, on the contrary, the motion is decelerated. In
the case of a varied motion, it is possible to have both phases (for instance, a motion the
diagram of which is given in Fig.5.7,b) or only one of them.
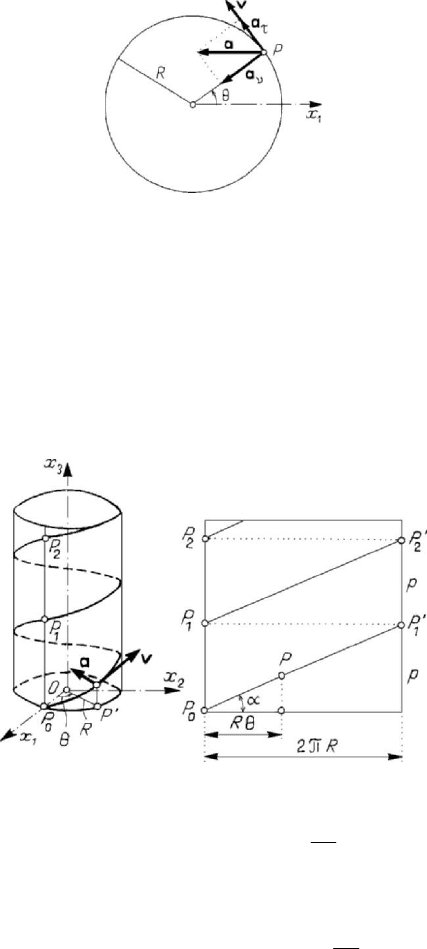
1.3.2 Circular motion
If the trajectory is a circle of radius R (
r
R
=
ri), then the motion is called circular
(Fig.5.8). By means of the formulae (5.1.7), (5.1.19) or of the formulae (5.1.14),
(5.1.28), we obtain
=×ωvr,
vv v sR
τ
θ
ω
=
===
,
0
sR sθ
=
+
, (5.1.41)
2
ω=×−
ωarr,
aaR
τ
θ
ω
=
=
,
2
r
aaR
ν
ω=− = ,
42
aRωω=+
,
(5.1.41')
where we have introduced the angular velocity
ω and the angular acceleration ε ,
defined by the relations
Kinematics
303
3
() ()ttω
=
ω i ,
3
() () ()tttω
=
=
εω i , () ()ttωθ=
, () () ()tttεωθ==
.
(5.1.42)
Figure 5.8. Circular motion of a particle.
If
0ω =
,
constω =
(and
constv
=
), then the motion is uniform and we have
0
tθω θ=+,
(
)
0
sRtωθ=+, vRω
=
, 0a
τ
=
,
2
aa R
ν
ω==
.
(5.1.43)
1.3.3 Helical motion
Let be a particle in a uniform motion on a helix of pitch 2tanpRπα
=
, situated on
a circular cylinder of radius
R (Fig.5.9). The trajectory is given by
Figure 5.9. Helical motion of a particle.
1
cosxR tω= ,
2
sinxR tω
=
,
3
2
p
xt
ω
π
=
.
(5.1.44)
Hence,
1
sinvR tωω=− ,
2
cosvR tωω
=
,
3
2
p
v
ω
π
=
,
(5.1.45)

MECHANICAL SYSTEMS, CLASSICAL MODELS
304
2
2
2
cos
4
pR
vR
ω
ω
α
π
=+=
;
(5.1.45')
then
2
1
cosaR tωω=− ,
2
2
sinaR tωω=− ,
3
0a
=
(5.1.46)
and
2
aRω=
.
(5.1.46')
Thus, the motion is uniform and the acceleration is reduced to the normal
acceleration given by (5.1.20). Comparing to (5.1.46') and taking into account (5.1.45'),
we obtain the radius of curvature
2
22
4cos
pR
R
R
ρ
πα
=+ = ;
(5.1.47)
the principal normal is parallel to the plane
12
Ox x and passes through the
3
Ox -axis;
hence, the acceleration
a
enjoys the same property (as it results from the formulae
(5.1.46)).
1.3.4 Cycloidal motion
Another interesting particular case of motion is that of a particle P on a cycloid; that
one is the locus of a point of a circle (for instance, on the peripheral of a wheel in a
vertical plane) of radius
R , which is rolling without sliding on a straight line
(horizontal) (Fig.5.10). The imposed condition leads to
Figure 5.10. Cycloidal motion of a particle.
tθω
=
,
0
v
R
ω =
(5.1.48)
where
0
const=
J
JJJJG
v is the velocity of the centre O
′
of the circle, supposed to have a
uniform motion. The parametric equations of the trajectory are
so that

Kinematics
305
1
(sin)xRt tωω=− ,
2
(1 cos )xR tω
=
− ,
(5.1.49)
wherefrom one obtains the components of the velocity and of the acceleration
1
(1 cos )vR tωω=− ,
2
sinvR tωω
=
,
(5.1.49')
2
1
sinaR tωω= ,
2
2
cosaR tωω= ,
(5.1.49'')
respectively.
One can easily prove that the modulus of the velocity and of the acceleration are
expressed in the form
0
2 sin 2 sin
22
tt
vR v AP
ωω
ωω
===,
22
aR OPωω
′
==
,
(5.1.49''')
respectively; the acceleration
a
is directed towards the centre O
′
of the circle. Hence,
from the point of view of the velocities, the particle behaves as in a uniform motion of
angular velocity
ω around the point A ; what concerns the accelerations, it behaves as
in a rotation around the point
O
′
.
2. Kinematics of the rigid solid
In the study of the motion of a rigid solid, it is necessary to study the motion of an
arbitrary point
P of it with respect to a fixed frame of reference
′
R of orthogonal
Cartesian co-ordinates
123
Ox x x
′′′ ′
. By means of some basic kinematics formulae which
are deduced, one considers some particular cases of motion; hence, one can pass to the
general case of motion of the rigid solid.
2.1 Kinematical formulae in the motion of a rigid solid
We put in evidence, in what follows, some results concerning the determination of
the velocity and the acceleration in the motion of a rigid solid.
2.1.1 Velocity in the motion of the rigid solid
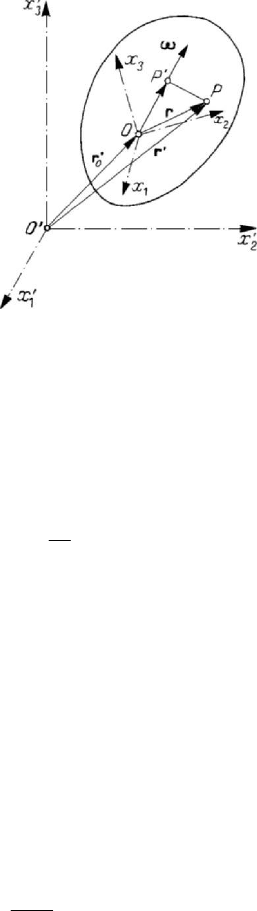
Let be a movable frame of reference R of orthogonal Cartesian co-ordinates
123
Ox x x , in a rigid linkage with the rigid solid (hence, in motion with respect to the
fixed frame of reference
′
R , specified by the constant unit vectors
j
′
i , 1, 2, 3j = );
obviously, we use right orthonormed frames of reference. We denote by
0
′
r the
position vector of the pole
O with respect to the pole O
′
and by
j
j
x
′
′′
=
ri the position
vector of the point
P
with respect to the frame
′
R ; analogously, the position vector
of the same point
P
with respect to the movable frame of reference is
j
j
x=ri, where
j
i , 1, 2, 3j = , are the unit vectors of the frame R (Fig.5.11). We mention that, during
the motion,
const=
J
JJJJG
r with respect to the moving frame R. We notice that the latter
frame can be determined by the vector
0
r and the unit vectors
j
i , 1, 2, 3j = (as a
MECHANICAL SYSTEMS, CLASSICAL MODELS
306
matter of fact, one of the unit vectors and the plane formed by the other two unit vectors
are sufficient), that is 2+1=3 independent scalar quantities; this result corresponds to the
six degrees of freedom of the rigid solid. The position of the point
P with respect to
the frame
′
R is given by
Figure 5.11. Motion of the rigid solid with respect to a fixed and
a movable frame of reference.
0
′
′
=
+rrr.
(5.2.1)
Using the formula (A.2.37) which links the absolute derivative (with respect to the
frame
′
R ) to the relative derivative (with respect to the frame R ), we may write
d
dt
=
=×
ω
r
rr
,
(5.2.2)
where
ω is a vector specified by (A.2.36), the same for all the points of the rigid solid
(hence, an invariant); we took into account that the derivative of
r with respect to the
movable frame of reference is equal to zero (
/ t
∂
∂=r0). For the velocity
′′
=
vr
of
the point
P with respect to the fixed frame of reference we obtain Euler’s formula,
which gives the distribution of the velocities in a rigid solid
0
′
′
=
+×
ω
vv r,
(5.2.3)
where we have introduced the velocity
00
′
′
=
vr of the pole O of the frame R with
respect to the same frame
′
R . We notice that the relations (5.2.2), (5.2.3) may be
written in the form
d
d
OP
OP
t
=×
J
JJG
J
JJG
ω ,
(5.2.2')
0
P
OP
′′
−
+× =
J
JJG
ωvv 0
(5.2.3')

Kinematics
307
too, where
O and P are two arbitrary points of the rigid solid. Scalarly, we have
O
ii j
ijk k
vv xω=+∈ , 1, 2, 3i
=
.
(5.2.3'')
A scalar product of the relation (5.2.3) by
vers r leads to a mixed product which
vanishes, so that
0
vers vers
′′
⋅
=⋅vrv r;
(5.2.4)
hence, the projections of the velocities of two points of a rigid solid on the straight line
which links these points are equal. We notice that the relation (5.2.4) corresponds to the
relation (3.2.22'), a consequence of the rigidity condition (3.2.22), and represents the
condition of compatibility of the velocities in the motion of the rigid solid (relation of
holonomic constraint).
Let
1
P and
2
P be two points of the rigid solid. From the relation
12 2 1
P P OP OP=−
J
JJJG JJJJGJJJG
, it results
222
12 1 2 1 2
2P P OP OP OP OP=+−⋅
J
JJJG JJJG JJJJG JJJG JJJJG
; hence, the
condition of rigidity of the solid (
12
constPP =
J
JJJG
,
1
constOP =
J
JJG
,
2
constOP =
J
JJJG
)
leads to
(
)
12
,constOP OP =
J
JJG JJJJG
)
. We may thus state that the angle of two arbitrary
segments of a rigid solid is conserved in a general motion of it.
Analogously, effecting the scalar product of the relation (5.2.3) by the vector
ω
, we
get
0
′
′
⋅
=⋅
ω
ωvv
(5.2.5)
and may state
Theorem 5.2.1. The scalar product of the velocity of a point of the rigid solid by the
vector
ω
is an invariant (the same for all the points of the rigid solid).
We can state also that the projection of the velocity of a point of the rigid solid on the
vector
ω is a constant (the same for all the points of the rigid solid). It follows that, in
the case of a general motion (for
0
′
v and
ω
arbitrary vectors), there are not points of
vanishing velocity (for which
′
=
v0). We obtain this result also by observing that the
equation
0
′
+×=ωvr0 has a solution only if
0
0
′
⋅
=
ω
v ; as well, if the vectors
0
′
v
and
ω are orthogonal at a point, then they are orthogonal at any other point.
Hence, in the motion of the rigid solid do appear two kinematic invariants: the vector
ω as we will see in Subsec. 2.2.2, it is an angular velocity) and the scalar product
⋅ ωv
(or the projection of the vector
v
on the direction of the vector
ω
, that is
/ ω⋅ ωv ).
2.1.2 Acceleration in the motion of a rigid solid
Differentiating the relation (5.2.3) with respect to time in the frame
′
R , we obtain
the acceleration with respect to the same frame

MECHANICAL SYSTEMS, CLASSICAL MODELS
308
0
()
′′
=+×+××
ω
ωωaa r r
(5.2.6)
where we have introduced the acceleration
00
′
′
=
av
of the pole O of the movable
frame of reference with respect to the same fixed frame; we took into account the
formula (5.2.2) and the relation
d/d /tt
=
=∂ ∂
ω
ωω (on the basis of the formula
(A.2.37)). Using the basic formula of the triple vector product (2.1.49), we may write
2
0
()ω
′′
=+×+⋅ −
ωωωaa r r r
(5.2.6')
too; in components, we have
(
)
2O
ii ij ij j
ijk k
aa xωω ω δ ω
′′
=+ − −∈
, 1, 2, 3i
=
.
(5.2.6'')
Denoting by
P
′
the projection of the point P on the vector ω (we have
OP OP P P
′′
== +
J
JJJGJJJJG
J
JJG
r
) and noting that
OP
′
×
=
J
JJJG
ω 0
in (5.2.6) and
0PP
′
⋅=
J
JJJG
ω
in
(5.2.6'), we obtain Rivals’ formula
2
0
OP P Pω
′′ ′
=+× −
J
JJJG
J
JJG
ωaa .
(5.2.6''')
Imposing the condition
0
i
a
′
=
, 1, 2, 3i
=
, we get a system of linear equations in
the co-ordinates
j
x
, obtaining thus the points in which the acceleration of the rigid
solid vanishes. If we use the formula (2.1.36''), then we may write the determinant of
the coefficients of the unknowns of this system in the form
(
22
1
det
6
ij ij i
ijk k ijk lmn l il
Δωωωδ ω ωωωδ=−−∈=∈∈−
⎡⎤
⎣⎦
)
(
)
(
)
22
pm qn r
jjmjmq
ilp k kn knr
ω ωω ωδ ω ωω ωδ ω−∈ − −∈ − −∈
;
developing, we obtain 27 sums of products, seven of them being equal to zero, because
they correspond to products of symmetric tensors by antisymmetric ones with respect to
the same indices. Taking into account the formulae (2.1.46)-(2.1.46'') and the above
observation, we get
222 2
() ( )
ijij iijj
Δ ωωωω ωωω ω ω ω=−=⋅−=−×
ω
ωωω,
(5.2.7)
where we have used Lagrange’s identity (2.1.33).
If
×≠
ωω 0 , then there exists a point (and only one), called the pole of
accelerations, for which the acceleration vanishes at a given moment; hence, this pole
is moving with respect to both frames of reference (fixed and movable). One may thus
state
Theorem 5.2.2. In the general motion of a rigid solid, the instantaneous distribution of
the accelerations is the same as in the case of a rigid solid with a fixed point (the pole
of accelerations) at the respective moment.

Kinematics
309
If
×=
ωω 0 , then the system of linear equations may be impossible, so that points
of null acceleration do not exist (the case of a translation or of a helical motion), or may
be indetermined, existing a straight line (an instantaneous axis of rotation, support of
the vector
ω
) for which all the points have a vanishing acceleration (the case of a
rotation or of a plane-parallel motion). All these particular cases will be considered in
Secs 2.2 and 2.3.
The scalar product of relation (5.2.6) by the vector
ω
, where
′
=a0, leads to a
scalar equation of the form (2.1.53), hence
0
()0
′
⋅
+×⋅=
ωωωar,
(5.2.8)
where we took into account the relation (2.1.53) and the conditions in which a triple
scalar product vanishes. The solution of this equation is of the form (2.1.53') and we
may write
0
2
()
()
′
⋅
=× × − ×
×
ω
ω
ωωω
ωω
a
rp
.
(5.2.8')
The arbitrary vector
p is determined so that the vector equation obtained from (5.2.6),
where we make
′
=
a0
, be verified; one observes once more the important rôle played
by the vector product
×
ωω.
In general,
(,, ) 0×≠
ωωω ω , so that we may represent the vectors r and
0
′
a in a
frame of reference defined by the three factors of this mixed product, in the form
λμν
=
++×
ωωωωr ,
0
OOO
aaa
μν
λ
′′′′
=
++×
ω
ωωωa
;
(5.2.9)
replacing in the vector equation obtained from (5.2.6), making
′
=
a0
, and noting that
basis’ vectors are arbitrary, we obtain the scalar system
2
() 0a
λ
μν
′
+
⋅+=
ωω ω ,
2
()0a
μ
ωμ ν
′
−
−⋅ =
ωω
,
(5.2.9')
2
0a
ν
λων
′
−
−=
;
We see thus that the determinant of the coefficients of the unknowns is given by the
same formula (5.2.7), similar conclusions being obtained.
The condition (5.2.4) of compatibility of the velocities may be written also in the
form
()
0
OP
OP
′′
−
⋅=
J
JJG
vv
;
(5.2.4')
hence, the difference of the projections of the velocities of two points of the rigid solid
on the straight line which links them vanishes (or the difference of the velocities of the
two points is normal to the straight line which links them). Analogously, the condition
(3.2.23'') of compatibility of the accelerations becomes