Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
xii
Passing by non-significant details, one presents some applications connected to
important phenomena of nature, and this also gives one the possibility to solve
problems of interest from the technical, engineering point of view. In this form, the
book becomes – we dare say – a unique outline of the literature in the field; the author
wishes to present the most important aspects connected with the study of mechanical
systems, mechanics being regarded as a science of nature, as well as its links to other
sciences of nature. Implications in technical sciences are not neglected.
Starting from the particle (the simplest problem) and finishing with the study of
dynamical systems (including bifurcation, catastrophes and chaos), the book covers a
wide number of problems (classical or new ones), as one can see from its contents. It is
divided in three volumes, i.e.: I. Particle mechanics. II. Mechanics of discrete and
continuous systems. III. Analytical mechanics.
The book uses the known literature, as well as the original results of the author and
his more than fifty years experience as a Professor of Mechanics at the University of
Bucharest. It is devoted to a large circle of readers: mathematicians (especially those
involved in applied mathematics), physicists (particularly those interested in mechanics
and its connections), chemists, biologists, astronomers, engineers of various specialities
(civil, mechanical engineers etc., who are scientific researchers or designers), students
in various domains etc.
7 January 2006
P.P. Teodorescu
Chapter 1
NEWTONIAN MODEL OF MECHANICS
The mathematical models of mechanics, the first basic science of nature, are shortly
presented in this chapter; stress is put on the notion of mechanical system.
Considerations concerning the units are made and some results concerning the theory of
homogeneity and similitude are given. Using these introductory notions, one can pass to
a mathematical study of the mechanical systems.
1. Mechanics, science of nature. Mechanical systems
All the phenomena of nature are characterized by motion; this is an essential property
of matter, having infinity of aspects. For instance, the motion can be mechanical,
physical, chemical and biological; there correspond various sciences of nature. Among
them, mechanics studies the objective laws of the mechanical motion of material bodies,
the simplest form of motion of matter; we will deal with such a study in what follows.
The scientific study of matter has put in evidence its existence in the form of physical
systems. The simplest physical system is the substance, which is met in nature in the
form of material body; we will consider these bodies in their real form, as well as in
their idealized form of discrete systems of particles (atoms, molecules, usual bodies,
planets etc.) or of continuous systems (solids, fluids), under the denomination of
mechanical systems.
Mathematics plays a very important rôle in the study of a science of nature.
Mechanics has been the first science of nature which was strongly mathematicized, by
considering various mathematical models, which have been proved to correspond to the
surrounding reality. To mechanical systems there correspond thus mathematical models
of organized matter, having certain properties of structure, form etc. The development
of mechanics has been thus much influenced by the use of a strong mathematical tool;
as a matter of fact, we observe that mechanics also played an important rôle in the
introduction and development of many mathematical notions.
1.1 Basic notions
Introducing the notions of system and mathematical model, we consider the main
systems and models of such kind used in mechanics; we put thus in evidence the
hypotheses that are introduced and the basic notions which appear. The object of study
of mechanics is thus emphasized. We must point out that the notions which will be
introduced are basic notions; these ones cannot be defined with the aid of other notions,
and they must be described by their various properties, obtaining thus the considered
mathematical models.
1
MECHANICAL SYSTEMS, CLASSICAL MODELS
2
1.1.1 Notion of system. Notion of mathematical model
In the study of a science of nature, more and more the connection between the
modern methods of the theory of systems and the mathematical modelling of this
science is put into evidence. One must first of all lighten the notion of system, which
may be different from that suggested by the usual language; on the other hand, this
notion must be used always when one has to do with complicated phenomena, the
search of which is proved to be difficult. At the same time, one must take into
consideration the possibility of coupling characteristic phenomena from various
sciences of nature (mechanics, physics, chemistry, biology etc.).
A system is defined by a set of elements (component parts), which influence
(condition) each other (which interact), on which external influences (actions,
denominated input) take place, and the actions of which towards the exterior (towards
other systems) are denominated output. One obtains thus the schema
Input
⎯
⎯⎯⎯→
Output
⎯
⎯⎯⎯→
Among the most important properties of a system we must mention its change
(transformation, motion), as well as the possibility to be influenced (conducted) by a
convenient choice of the inputs (forces). In classical mechanics, the connection between
the influences (actions) exerted on the system and the changes of the latter one is called
dynamics of systems. It is understood that these considerations refer first to mechanical
systems; but, in general, taking into account the connection between various systems,
dynamics of systems is an interdisciplinary science.
To study these systems, following problems are put: i) the construction of the
mathematical model corresponding to a given system; ii) the study of the model thus
created (putting into evidence the properties of the system); sometimes, because of the
difficulties of the considered problems, one cannot give a complete solution to the
problem of motion and one emphasizes only some of its properties or one can give only
approximate solutions (e.g., by linearizing non-linear phenomena); iii) the choice of the
main (dominant) inputs, which govern the considered phenomena; iv) the simulation of
the behaviour of the considered system; one can thus put in evidence the deficiencies of
the chosen model as well as of the considered inputs, improving then the model and the
inputs. We will deal particularly with the first two problems in our study, accidentally
with the third one and less with the fourth one.
Usually, by model we understand an object or a device artificially created by men,
which is similar in a certain measure with another one, the latter being an object of
search or of practical interest. The scientific notion of model constitutes a possibility of
knowledge of the surrounding reality, consisting in the representation of the
phenomenon to be studied with the aid of a system artificially created. Hence, the most
general property of a model is its capacity to reflect, to reproduce things and phenomena
of the objective world, their necessary order and their structure.
From the very beginning, the models can be divided in two great classes: technical
(material) models and ideal (imaginary) models; this classification is made considering
the construction of the models as well as the possibilities by which the objects to be
studied may be reproduced.
Set of elements in
continuous
Newtonian model of mechanics
3
The technical models are created by man, but they do exist objectively, independent
of his conscience, being materialized in metal, wood, electromagnetic fields a.s.o. Their
destination is to reproduce for a cognitive goal the object to be studied, to put in
evidence its structure or certain of its properties. The model can maintain or not the
physical nature of the object which is studied or the geometrical similitude to this one.
If the similitude is maintained, but the model differs by its physical nature, we have to
do with analogic systems. E.g., electrical models may reproduce processes analogous to
those encountered in mechanics, qualitatively different, but described by similar
equations. These models, as others of the same kind, take part in the class of
mathematical models.
One can construct such models, for instance, to study the torsion of a cylindrical
straight bar of arbitrary simply or multiply connected cross section. If the bar is
isotropic, homogeneous and linear elastic (subjected to infinitesimal deformations), then
the phenomenon is governed by a Poisson type equation in B. de Saint-Venant’s theory.
L. Prandtl showed that the same partial differential equation is met in case of a
membrane which rests on a given contour and is subjected to an interior constant
pressure; if this contour is similar to the frontier of the plane domain corresponding to
the cross section of the straight bar, then we obtain a correspondence of the boundary
conditions, hence the classical membrane analogy (or of the soap film). One uses also
other analogies for the same problem, i.e.: electrical modelling, modelling by optical
interference, hydrodynamical modelling a.s.o.
Another type of technical models used in mechanics corresponds to the intuitive
notion of model. Various elements of construction are performed partially or in totality
at a reduced scale, obtaining thus results concerning the maximal stresses and strains
which appear. These models can be built of the same material as the objects to be
studied or of other materials, so that quite difficult problems of similitude must be
solved.
Generally, the ideal models are not materialized and – sometimes – they neither can
be. From the viewpoint of their form, they can be of two types.
The models of first order are built by using intuitive elements, which have a certain
similitude with the corresponding elements of the real modelled phenomenon; we
observe that this similitude must not be limited only to space relations, but can be
extended also to other aspects of the model and of the object (for instance, the character
of the motion). The intuitiveness of these models is put into evidence first of all by the
fact that the models themselves, formed by elements sensorial perceptible (plates,
levers, tubes, fluids, vortices etc.), are intuitive, and – on the other hand – by the fact
that they are intuitive images of the objects themselves. Sometimes, these models are
fixed in the form of schemata.
The models of second order are systems of signs, their elements being special signs;
logical relations between them form – at the same time – a system, being expressed also
by special signs. In this case, there is no similitude between the elements of the model
and the elements of the corresponding objects. These models do not have intuitiveness
in the sense of a spatial or physical analogy; they have not, by their physical nature,
nothing in common with the nature of the modelled objects. The models of second order
reflect the reality on the basis of their isomorphism with this reality; we suppose a one-
to-one correspondence between each element and each relation of the model. These
models reproduce the objects under study in a simplified form, constituting thus – as all
models – a certain idealization of the reality.

MECHANICAL SYSTEMS, CLASSICAL MODELS
4
The types of ideal models mentioned above can be considered as limit cases. In fact,
there exist ideal models that have common features to both types of models which have
been described; they contain systems of notions and axioms which characterize
quantitatively and qualitatively the phenomena of nature, for instance representing
mathematical models. Such models are extremely important and their systematic use
has led to the great development of mechanics of deformable bodies in the last time.
The basic dialectical contradiction of the model (the model serves to the knowledge
of the object just because it is not identical with the latter one) is useful, for instance to
put into evidence the properties of continuous deformable media. In fact, a model
contains more information about the object if it is closer to it. But physical reality is
very complicated; the solving of the contradiction is realized by the use of a sequence of
models, more and more complete, each one having its contribution to the knowledge of
the real continuous deformable media. We try to put into evidence just this process of
continuous improvement of the models in general mechanics as well as in mechanics of
continuous deformable media, process that constitutes the main tenor of the
development of mechanical systems.
In general, after adopting a model, it is absolutely necessary to compare the results
obtained by theoretical reasoning to physical reality. If these results are not satisfactory
(sometimes it happens to be between some limits, which can be sufficiently close), then
it is necessary to make corrections or to improve the chosen model. In fact, on this way,
mechanics, the theory of mechanical systems developed itself, the word “model” being
more and more used by researchers dealing with this science of nature.
1.1.2 Vectorial modelling of mechanical quantities. Vector space
A great part of the quantities which appear in mechanics are mathematically
modelled as vector quantities; in fact, the concept of vector appeared together with the
development of mechanics. We will thus introduce the notion of vector space, a space
of mechanical quantities, by considering three types of vectors useful in the study of
mechanical systems, i.e.: free vectors, bound vectors and sliding vectors.
The free vector is a mathematical entity characterized by direction and modulus
(magnitude). The direction includes all straight lines parallel one to each other, as well
as a sign; in case of opposite signs, the directions are opposite. It is denoted by
V
(sometimes
→
V
or
V
or
V
); the modulus of this vector will be
=
V V
, ≥ 0V (it is
denoted also by
V , and it is called the norm of the vector).
We fix a right-handed frame of reference, formed by an origin
O
and by three
orthogonal axes
=,1,2,3,
i
Ox i in the Euclidean three-dimensional space
3
E . We
mention that by a right-handed frame of reference we understand that one for which an
observer situated along the axis
i
Ox , in its positive sense, sees the superposition of the
axis
j
Ox onto the axis
k
Ox , after a rotation of angle /2π in the positive sense (from
right to left, the right-hand rule); we admit that
=
(, , ) (1,2,3)ijk ,
(1.1.1)
the indices
,,ijk taking the distinct values 1, 2, 3 in the given order or after a cyclic
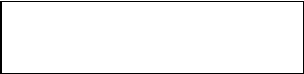
permutation of them. Projecting the free vector
V on the axes (we use the definition
Newtonian model of mechanics
5
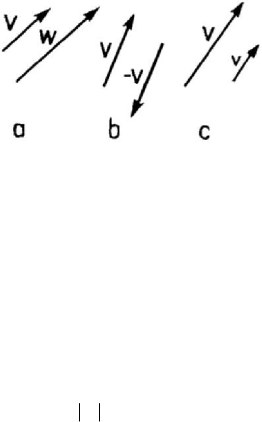
that will be given later, in this subsection), we obtain its canonical co-ordinates
=,1,2,3
i
Vi (Fig.1.1,a); these co-ordinates have a certain sign, as the direction of the
Figure 1.1. Free (a), bound (b) and sliding (c) vectors.
projections coincides or not with the direction of the co-ordinate axes (which are
directed axes), and constitute an ordered triplet of numbers, which entirely characterize
the free vector. We can write
=
⎛⎞
===++
⎜⎟
⎝⎠
∑
1/2
3
2222
123
1
iii
i
V V VV VVV,
(1.1.2)
where we use Einstein’s convention of summation, in conformity with which the double
existence of an index (called dummy index) in a monomial indicates the summation with
respect to this index. An index, which appears only once, will be a free index; in the
frame of the adopted convention, an index cannot appear three times.
The bound vector is a mathematical entity, characterized by direction, modulus
(magnitude) and point of application (origin). In the frame of reference
123
Ox x x , the
point of application
P (the origin of the vector) is given by the position vector
r
123
(, , )xxx (which is also a bound vector, the point of application of which is the
origin
O
); the point Q represents the extremity of the vector (Fig.1.1,b). A bound
vector
=
V PQ
J
JJG
is characterized by the bound vector r and the free vector V , hence
by two ordered triplets of numbers (
i
x and
=
,1,2,3
i
Vi ). Thus, PQ
J
JJG
is a directed
(oriented) segment; we notice that
QP
J
JJG
is the opposite directed segment.
The sliding vector is a mathematical entity, characterized by direction, modulus
(magnitude) and support (the vector lies on an axis
Δ , without mentioning the point of
application, but having the possibility to slide along this axis). From the mathematical
point of view, a sliding vector will be characterized also by two ordered triplets of
numbers (
i
x and =,1,2,3
i
Vi ), between which there exists a certain relation, hence by
five independent numbers (a sixth number is necessary to can have the position of the
point of application
P on the axis Δ , with respect to an origin chosen on it, to obtain a
bound vector) (Fig.1.1,c).
We say that between two vectors
V and W of the same type there exists a relation
of equality if they are characterized by the same elements (direction, modulus, point of
application, support) or the same canonical co-ordinates. For instance, for the free
MECHANICAL SYSTEMS, CLASSICAL MODELS
6
vectors
(
)
V
i
V and
()
W
i
W we can write
=VW,
=
ii
VW,
=
1, 2, 3i
;
(1.1.3)
for the sliding vectors we must have also the same support, while for the bound vectors
the same point of application. We mention following properties (
V , W and U are
vectors):
i)
=
VV (reflexivity);
ii)
=
⇔=VW WV (symmetry);
iii)
=
VW, =⇒=WU VU (transitivity)
valid for each type of vector.
If we bound two equal free vectors to two distinct points of application, then we
obtain two bound vectors, which are equipollent.
Let be vectors
1
V and
2
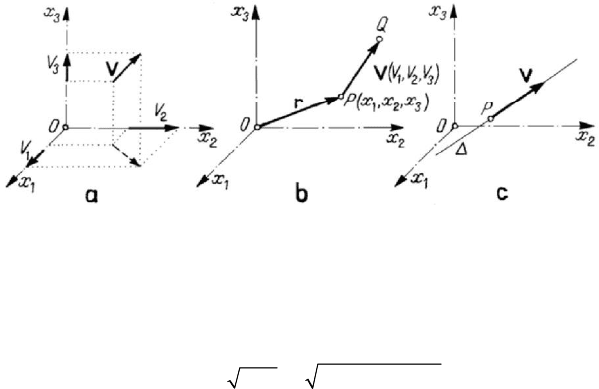
V ; the sum
=
+VV V
12
(1.1.4)
is a vector for which the direction and modulus are given by the diagonal of the
parallelogram constructed by means of these vectors, admitting that they are applied at
Figure 1.2. Addition of two vectors (a, b). Addition of n vectors:
non-vanishing resultant (c); vanishing resultant (d).
the same point (Fig.1.2,a). The above given definition corresponds to free vectors, to
bound vectors (if they have the same point of application), as well as for sliding vectors
(if their supports are concurrent). The sum can be obtained also by closing a triangle,
the first two sides of which are
1
V and
2
V (Fig.1.2,b); this observation can be used to
construct the sum of
n vectors (Fig.1.2,c)
n
=
+++VV V V
12
... .
(1.1.5)
We can write also Chasles’ relation
−
=+ ++
112 1
...
nn
n
PP PP P P P P
J
JJJG JJJG JJJJG JJJJJJJG
.
(1.1.5')
Newtonian model of mechanics
7
The resultant
V closes the vectors’ polygon (a skew polygon in
3
E
); if this
polygonal line is closing, then the resultant vanishes (Fig.1.2,d). We mention following
properties:
i)
+
=+VV VV
12 21
(commutativity);
ii)
()
(
)
+
+=++VVV VVV
123 123
(associativity).
The inequalities
−≤+≤+VV VV VV
12 12 12
,
12
≥VV
(1.1.6)
result from Fig.1.2,b.
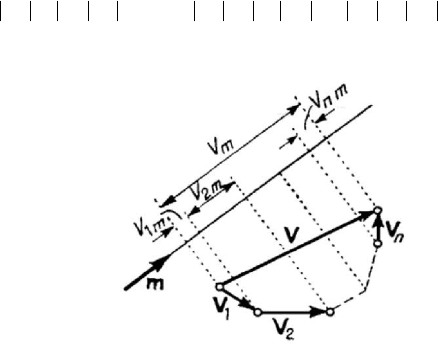
Figure 1.3. Projection of a vector on a directed axis.
Let
im
V be the projection of vector
i
V ,
=
1,2,...,in, on an directed axis, of sliding
vector
m , while
m
V is the projection of vector V on the same axis (by projection of a
bound vector
PQ
J
JJG
on a directed axis we understand the length of the directed segment
''PQ
J
JJJG
of this axis, limited by planes normal to the given axis, passing through points P
and
Q ; this length is a positive number if
(
)
<m,/2PQ π
J
JJG
)
and negative in the
contrary case). We observe that (Fig.1.3)
=
+++
12
...
mnm
mm
VV V V;
(1.1.7)
if the vectors’ polygon is closing, then the sum of the projections on an axis vanishes.
Thus, for the sum of two vectors one obtains the canonical co-ordinates
=
+
12
i
ii
VV V,
=
1, 2, 3i .
(1.1.8)
We say that vector
V is equal to zero
=
V0
(1.1.9)
if and only if
MECHANICAL SYSTEMS, CLASSICAL MODELS
8
= 0
i
V
,
=
1, 2, 3i , or
=
0V
;
(1.1.9')
in this case, the properties
+
=+ =V00V V
(1.1.9'')
are verified.
We observe that the law of internal composition of vectors (addition of vectors,
introduced above) is essential to define them; we must complete the definition given in
this subsection, because there exist quantities which can be represented by directed
segments, but which do not verify such a law of composition, so that they are not
vectors in the sense considered above (for instance, the finite rotation of a rigid solid
about an axis).
Figure 1.4. The product of a scalar by a vector.
The scalar is a mathematical entity, characterized by sign and modulus (magnitude);
hence, it is a number.
The product of a scalar
λ by a vector V is a vector (Fig.1.4,a)
=
WVλ ,
(1.1.10)
which has the same direction as
V if > 0λ or an opposite direction if < 0λ , and the
modulus
=
WVλ
.
(1.1.10')
In the particular case
=
−1λ , we obtain the vector
−
V , which has the same
modulus as
V , but an opposite direction (Fig.1.4,b); this vector verifies relation
(
)
+
−=VV0.
(1.1.11)
As a consequence, the subtraction of two vectors is also an addition
(
)
−
=+−VV V V
12 1 2
.
(1.1.12)
We mention following properties:
i)
(
)()
==VVV
12 21 12
λλ λλ λλ (associativity);
ii)
()
+=+VV V
12 12
λλ λλ (distributivity with respect to addition of scalars);
iii)
()
+= +VV VV
12 12
λλ λ (distributivity with respect to addition of vectors).

Newtonian model of mechanics
9
The product (1.1.10) vanishes
(
)
=
V0λ if and only if
=
0λ or =V0.
We observe that two vectors
V and W have the same (or an opposite) direction
(they are collinear, even if they have not the same support) if and only if they verify a
relation of the form (1.1.10) or of the form
+
=VW0λμ ,
≠
,0λμ .
(1.1.13)
Let be a vector
V . We denote by
v
a vector which has the same direction as V , but
of modulus equal to unity (Fig.1.4,c); this vector is called the unit vector (versor) of
V
and is denoted by
=
vVvers .
(1.1.14)
We may write
versVV===VVvVv.
(1.1.14')
The unit vectors of the co-ordinate axes
j
Ox are denoted by
j
i ,
=
1, 2, 3j .
Let be the set of free vectors
{}
V , for which an operation of internal composition
(addition of vectors) is defined, so that the sum of two elements of this set is an element
of the same set; this operation is associative and admits an inverse.
Vector
0 is the neutral element, which verifies relations (1.1.9''), while vector −V is
the inverse of
V , verifying relation (1.1.11); these vectors belong to set
{}
V . Hence,
the set of free vectors
{}
V
forms an Abelian (commutative) group (the operation of
internal composition of vectors is commutative).
Because in the set
{}
V was defined also the operation of multiplication of one of its
elements by a scalar (external composition), this set constitutes a three-dimensional
vector space (the linear space
3
L ). Analogously, one can introduce also the n-
dimensional vector space
n
L .
1.1.3 Space. Time
Space and time are basic notions, which appear in a mathematical model of
mechanics. To study the mechanical motion, representations of space and time are
necessary; so, in classical mechanics, the physical space is the three-dimensional
Euclidean space
3
E , while time is assimilated also to a Euclidean space, but to a
unidimensional one
1
E
. It was thus admitted that material bodies have three dimensions
(e.g., length, width and height); but if the bodies to be studied are reduced to two
dimensions or to only one dimension, so that they may be modelled in such a form, then
we use a two-dimensional Euclidean space
2
E or a unidimensional one
1
E ,
respectively. The geometric models for space and time used in classical mechanics
reflect thus properties of real space and time, as objective forms of existence of matter.
In a classical model of mechanics, the space is considered infinite, continuous,
homogeneous, isotropic and absolute, being independent of matter. Material bodies are
immersed into space, where they fill a certain position with respect to other objects of
the material world; they have also a certain extent. One can thus say that the space