Власов К.П. Теория автоматического управления
Подождите немного. Документ загружается.

443
дет
0)1)(1(1)(
2
1
1
2
1
1
2
1
=−+=−= ppppH
γγγ
.
Исходя из требований устойчивости при нахождении экстремума учитываем корни только
первого сомножителя. Тогда
2/1
11
−
−=
γ
p и уравнение экстремали имеет вид:
tp
eCty
1
)(
1
⋅= , (4.22)
где С – постоянная интегрирования.
Заметим, что уравнение экстремали соответствует решению ДУ вида 0
=
+
yyT
&
с
характеристическим уравнением 01
=
+
Tp , где T – постоянная времени. Таким образом
экстремалью функционала Q
1
является экспонента с постоянной времени
1/2
1
T
γ
=
.
Уравнение экстремали функционала Q
2
получим, положив в (4.22)
1
γ
=0. Тогда, приняв
начальное значение координаты y(0)=1, можно записать
С
∀
t< 0
y
2
(t) =
0
∀
t≥ 0.
Так как объект управления описывается дифференциальным уравнением второго порядка
переходные процессы минимизирующие функционалы Q
1
и Q
2
физически нереализуемы.
Поэтому можно лишь определить величины изменяемых параметров системы (в нашем
случае k
oc
), при которых переходной процесс максимально приближался бы к оптималь-
ному. Для решения этой задачи запишем дифференциальное уравнение системы. Имеем
)(1
)(
)(
pW
pW
pW
р
р
+
=
, где
p
k
kkTp
k
pW
ос
р
2
1
1
1
)( ⋅
++
= .
Тогда дифференциальное уравнение системы примет вид:
ukykykkyT
oooc
=
+
++
&&&
)1(
1
, где k
o
=k
1
k
2
.
Пусть входной сигнал меняется скачком от u до 0, тогда, полагая
1)0( =y ; 0)0(
=
y
&
и обо-
значив
ooc
kkka /)1(
11
+= и
o
kTa /
0
= , получим:
0
10
=++ yyaya
&&&
. (4.23)
Определим значения Q
1
и Q
2
через коэффициенты дифференциального уравнения. Для
этого умножим (4.23) поочередно на y и
y
&
. Тогда получим
⎪
⎭
⎪
⎬
⎫
=++
=++
0
0
2
10
2
10
yyyayya
yyyayya
&&&&&
&&&
. (4.24)
Вычислим следующие интегралы, учтя при этом, что y(∞)=
y
&
(∞)=0
;
0
111100
2
0
0
∫∫
∞
∞
∞
−=−−=−= QQyydtyyydtyy
&&&&&
;
2
1
2
0
2
0
0
−=−==
∫∫
∞
∞
y
y
y
ydydtyy
&
0
2
0
0
0.
2
y
y
y
yydt ydy
∞
∞
=
=− =
∫∫
&
&&& & &
Тогда после интегрирования системы уравнений (4.24) получим:
1
011 2
111
0
2
1
0
2
a
aQ Q
aQ
⎫
−
−+ =
⎪
⎪
⎬
⎪
−=
⎪
⎭
.
Отсюда
)(
2
1
22
;
2
1
0
2
1
11
0
1
2
1
11
aa
aa
a
a
Q
a
Q +=+== . Тогда
444
)1(2
)()1(
)(
2
1
)(
10
2
010
2
1
10
2
1
1
1112
0
2
1
2
1
oc
oc
kkk
kakk
aa
a
QQdtyyQ
+
+++
=++=+=+=
∫
∞
γ
γγγ
&
.
Для нахождения
1
oc
k , соответствующего Q
1
=min, запишем:
.0
)1(
)(
1
2
1
10
1
=
+
+
−=
∂
∂
oc
o
ooc
kk
ka
kk
Q
γ
Отсюда оптимальное значение
2
oc
k
:
).1(
1
100
1
1
−+=
γ
ak
k
k
oc
Коэффициент k
oc
, соответствующий Q
2
=min (при
1
γ
=0) , будет
).1(
1
00
1
2
−= ak
k
k
oc
Пусть T=0.5c; k
1
=200; k
2
=0.25 1/c; k
0
=
21
kk
⋅
=50 1/c; 01.0
50
5.0
0
0
===
k
T
a c
2
.
Оценку Q
1
находим, задаваясь
1
γ
. Потребуем, чтобы переходной процесс приближался к
экспоненте с постоянной времени 0,1 с, тогда
1
γ
=0,01 с
2
, а
.03.0)102.050(
200
1
1
=−=
oc
k
Для оценки Q
2
получим
.02.0)101.050(
200
1
2
=−=
oc
k
Качество переходного процесса определяется коэффициентом демпфирования ξ, который
в нашем случае равен
Tk
kk
a
a
oc
0
1
0
1
2
1
2
+
==
ξ
.
Подставляя числовые значения k
oc
, имеем для первого случая ξ
1
=0,7, а для второго ξ
1
=0,5.
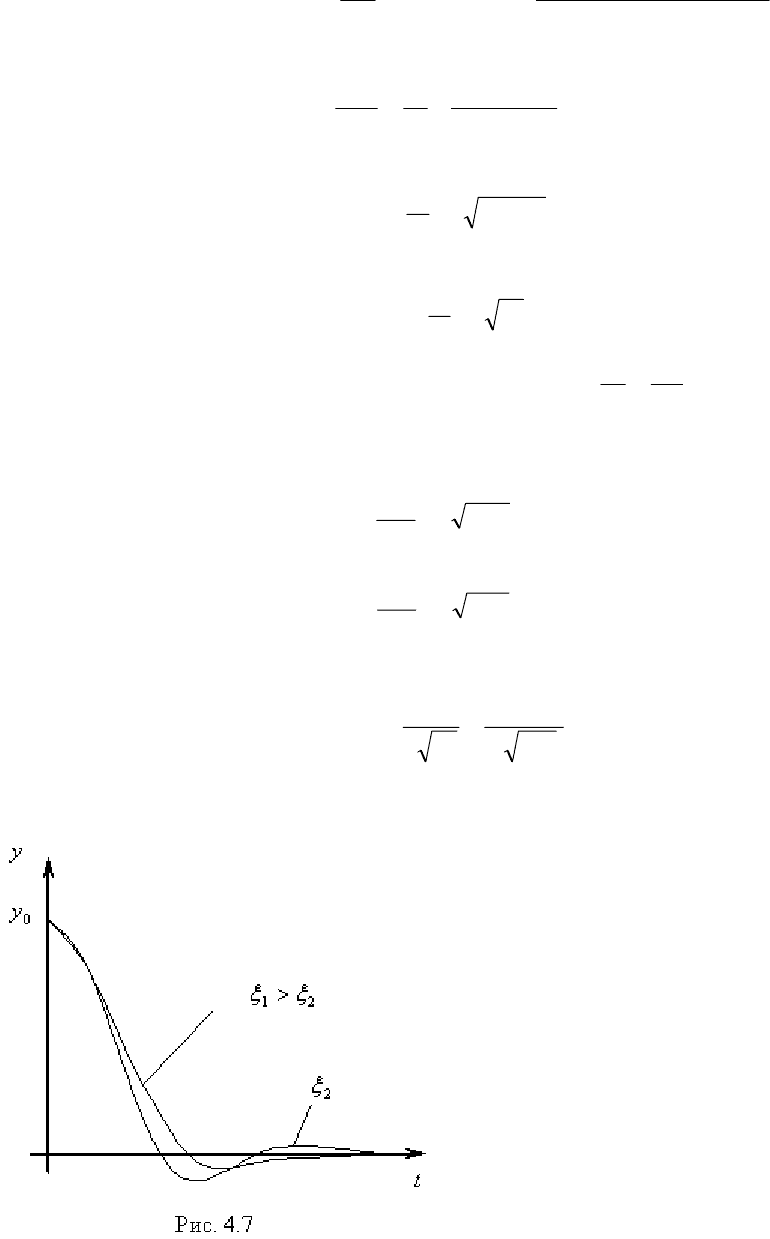
Перерегулирование при ξ=0,7 не превышает 5%, а при ξ=0,5 достигает 20 %, т.е. выбор k
oc
по критерию Q
1
дает меньшее перерегулиро-
вание, чем по Q
2
. Дальнейшее увеличение
1
γ
еще больше увеличивает k
oc1
и, следовательно,
ξ. При этом уменьшается перерегулирование,
но увеличивается время переходного процесса
(рис.4.7).
Таким образом, при заданной структуре объ-
екта мы не можем реализовать оптимальный
переходной процесс в чистом виде, миними-
зирующий критерий Q
1
и Q
2
, при любых k
oc
.
Это обусловленно инерционностью объекта
управления, что оставляет возможность реа-
лизации процесса лишь близкого к оптималь-
ному.
* * *
Пример 4.4. Найти оптимальную по быстродействию кривую изменения частоты враще-
ния двигателя постоянного тока независимого возбуждения при отработке заданного пе-
ремещения
∫
ω=ϕ
T
dt
0
0
и ограничениях, наложенных на нагрев двигателя:
∫
≤=
T
AdtRiq
0
2
.
445
Здесь
T
– время перемещения двигателя;
ω
– частота вращения; A – допустимые тепло-
вые потери;
i и
R
– ток и сопротивление якоря.
Решение. Математически поставленная задача формулируется следующим обра-
зом: найти экстремаль функционала
∫
==
T
dtQ
0
1
min
(4.25)
при наличии уравнений связи в виде
∫
≤=
T
AdtRiQ
0
2
2
;
∫
ϕ=ω=
T
dtQ
0
03
. (4.26)
Таким образом, имеем задачу на условный экстремум, для решения которой составим
вспомогательную функцию
ωλ+λ+=λ+λ+=
3
2
23322
*
1 RiFFFF . (4.27)
Запишем уравнение движения двигателя при неизменном потоке возбуждения
const
=
Ф и
отсутствии момента сопротивления
0
c
=
M :
iKM
dt
d
J
M
==
ω
д
;
ω
&
M
K
J
i = . (4.28)
Здесь
J – момент инерции, приведенный к валу двигателя;
д
M – момент двигателя;
ФCK
MM
= ;
M
C – электромашинная постоянная.
Тогда (4.27) можно записать в виде:
ωλωλ
3
2
2
*
1 ++=
&
KF ,
где
22
/
M
KRJK = .
Экстремаль функционала (4.25) с учетом (4.26) находят, решая уравнение Эйлера
02
23
**
=−=
∂
∂
−
∂
∂
ωλλ
ωω
&&
&
K
F
dt
dF
Откуда
;
2
1
2
02
3
KK
λλ
λ
ω
==
&&
(4.29)
где
320
/ λλ=λ .
Интегрируя (4.29), найдем уравнение экстремалей
21
2
0
1
0
4
1
ω;
2
1
ω CtCt
K
Ct
K
++=+=
λλ
&
. (4.30)
С учетом уравнения (4.28) запишем
1
0
2
ω C
K
J
t
KK
J
K
J
i
MMM
+==
λ
&
. (4.31)
Таким образом, оптимальное в смысле быстродействия управление двигателем при вы-
полнении условий (4.26) осуществимо при линейном законе изменения тока и изменении
ω по параболическому закону.
Постоянные интегрирования
1
C и
2
C и постоянный множитель
0
λ
определяют из гранич-
ных условий
446
00
)(;)0(;0)(;0)0( iTiiiT
−
=
=
=
ω
=ω , (4.32)
соответствующих началу разгона и окончанию торможения. Подставив (4.32) в (4.30) и
(4.31) окончательно запишем
M
M
KKi
JT
C
J
K
iC
0
0201
4
;0;
−=λ==
. (4.33)
Значения
0
i и
T
найдем с помощью уравнений связи (4.26) и соотношений (4.30)-(4.33).
После интегрирования получим
∫
===
T
A
TRi
dtRiq
0
2
0
2
3
; (4.34)
J
TiK
dt
M
T
6
2
0
0
0
=ω=ϕ
∫
. (4.35)
Решив совместно (4.34) и (4.35), определим
2
0
0
3
2
2
2
0
6
;
12
TK
J
i
AK
RJ
T
MM
ϕ
=
ϕ
=
. (4.36)
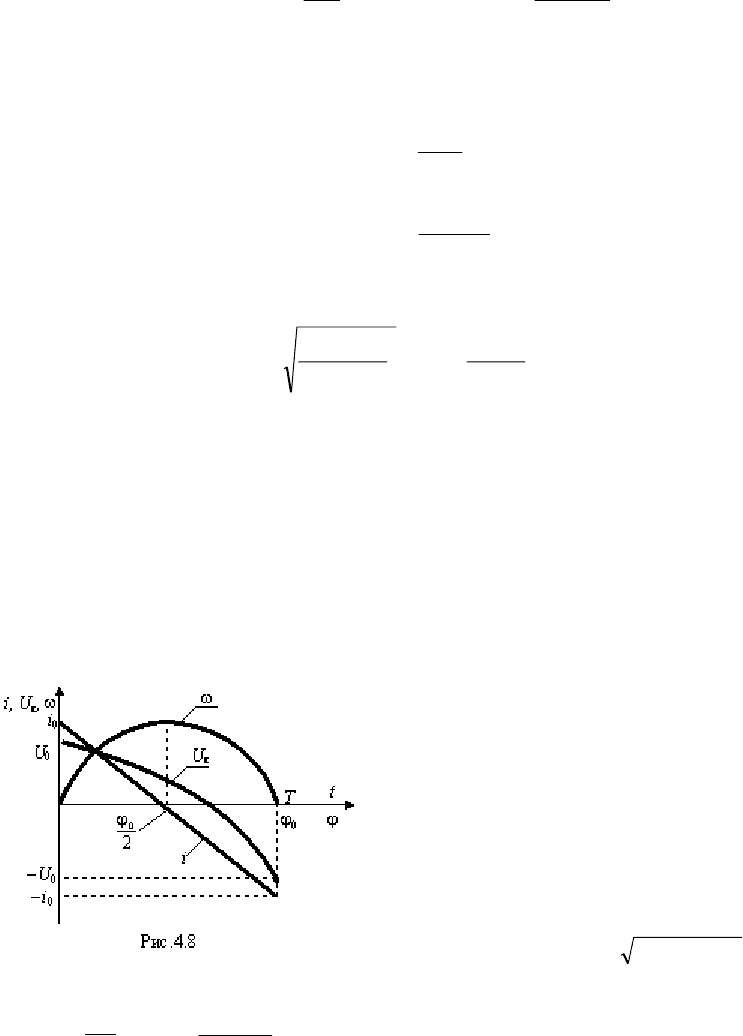
Подставив (4.33) с учетом (4.36) в (4.30) и (4.31), найдем в окончательном виде закон из-
менения тока
)(ti и скорости )(t
ω
при оптимальном режиме в функции времени (рис.4.8).
Так как управление двигателем постоянного тока обычно производится изменением на-
пряжения на зажимах якоря
я
U , то воспользовавшись вторым законом Кирхгофа для
якорной цепи двигателя
ω
+
=
e
KRiU
я
(4.37)
и уравнениями
)(ti и )(t
ω
, можно найти зависимость )(
я
tU . Так как зависимость )(ti ли-
нейная, а
)(t
ω
параболическая, то )(
я
tU тоже будет
изменяться по параболе (рис.4.8).
Если управлять двигателем, контролируя выходные
координаты
ϕ
и
ω
, то, исключив из уравнений )(ti и
)(t
ω
переменную t , получим зависимость )(
ω
i , под-
ставив которую в (4.37), найдем зависимость
)(
я
ω
U .
Кроме того, для учета знака
i необходимо также про-
изводить непрерывное измерение угла поворота ϕ.
Окончательно
ω+ϕ−ϕω−=ϕω
e
KBBU )2sign()2(),(
021я
,
(4.38)
где
0
1
ϕ
=
RA
B
;
3/1
2
0
2
2
4
9
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
ϕ
=
RJ
AK
B
M
.
Как вытекает из (4.38), для реализации оптимального алгоритма требуется нели-
нейный регулятор.
Динамическое программирование
В основе метода динамического программирования лежит принцип оптимальности, сфор-
мулированный Р. Беллманом для широкого круга задач. Согласно этому принципу, опти-
мальная стратегия управления не зависит от «предыстории» системы, а определяется ее
состоянием в настоящий момент времени и целью управления.
447
Поясним метод динамического программирования на простом примере управления объек-
том, движение которого характеризуется уравнением первого порядка
),(
0
uyf
dt
dy
= , (4.39)
где
u и y – единственные управление и координата системы, причем на
u
наложено ог-
раничение в виде
)(uu Ω∈ . Предполагается, что при этом координата y также не выходит
за границы допустимых значений.
Пусть заданы граничные условия
T
yTyyy
=
=
)(;)0(
0
и требуется минимизировать функ-
ционал вида
∫
=
T
dttuyFQ
0
0
),,(
. (4.40)
Прежде всего дискретизируем задачу, т.е. приближенно заменим непрерывную систему
дискретной. Этот этап является неизбежным при подготовке решения задачи на компьютере, и, в
то же время существенно упрощает процедуру поиска оптимального управления.
Запишем уравнение (4.39) в конечных разностях, разбив интервал
T
на N равных участ-
ков длительностью
NT /=Δ :
[]
[]
)(),(
)()1(
0
ΔΔ=
Δ
Δ
−
Δ
+
kukyf
kyky
,
или
),(
1 kkkk
uyfyy
=
−
+
, (4.41)
где
Δ= ),(),(
0 kkkk
uyfuyf .
Заменим интеграл (4.40) суммой
∑
−
=
ϕ+=
1
0
)(),(
N
k
Nkk
yuyFQ
, (4.42)
где
Δ= ),(),(
0 kkkk
uyFuyF
.
В выражении (4.42) выделено последнее слагаемое суммы
)(
N
y
ϕ
при Nk = , так как оно не
зависит от управления, ибо при
Tt
=
процесс управления заканчивается и
0=
N
u
.
Теперь задача состоит в определении последовательных значений управляющих воздейст-
вий
k
u
( 1,0 −= Nk ), минимизирующих сумму (4.42) при условии (4.41) и ограничении
)(uu Ω∈ . Таким образом, вариационная задача свелась к задаче нахождения минимума
функции многих переменных.
Метод динамического программирования дает возможность свести эту операцию к после-
довательности минимизаций функции одной переменной. Для этого применяется прием,
заключающийся в движении от конца процесса
)( Tt
=
к его началу )0( =t .
Допустим сначала, что рассматривается момент времени t
N -1
=Δ(N–1). Все значения u
k
,
кроме последнего, уже каким-то образом были осуществлены и при этом получили опре-
деленные значения
1−N
y
, соответствующие моменту времени t
N-1
. Согласно принципу оп-
тимальности, воздействие
1N
u
−
не зависит от «предыстории» системы и определяется
лишь состоянием системы, характеризуемым величиной
1−N
y
и целью управления. На по-
следнем участке траектории (от
1N
t
−
до
N
t
) величина
1N
t
−
влияет на те члены суммы
(4.42), которые относятся к этому участку, т.е.
(
)
).(,
111 NNNN
yuyFQ
ϕ
+
=
−−−
Пользуясь (4.41) при k = N–1, запишем полученное выражение в виде
()
(
)
[
]
111111
,,
−−−−−−
+
ϕ
+
=
NNNNNN
uyfyuyFQ
. (4.43)

448
Так как целью управления является минимизация Q, то это условие необходимо выдер-
жать и для рассматриваемого участка. Обозначим
11
)(
1
min
−−
=
Ω∈
−
NN
SQ
uu
N
. Как видно из (4.43),
значение S
N-1
зависит от состояния системы в момент t
N-1
, т.е. от
1−N
y . Тогда
=
=
−−−
Ω∈
−
111
)(
1
min)(
NNN
QyS
uu
N
(
)
(
)
[
]
{
}
11111
,,min
)(
1
−−−−−
+
ϕ
+
=
Ω∈
−
NNNNN
uyfyuyF
uu
N
.
В данном случае для определения S
N –1
нужно производить минимизацию Q
N –1
только по
одному переменному u
N –1
. Выполнив эту операцию, получим S
N –1
в виде функции от
1−N
y .
Эту функцию необходимо запомнить в компьютере перед переходом к последующим ста-
диям решения. Перейдя к предпоследнему участку траектории (от t
N –2
до t
N –1
), получим
()
(
)
)(,,
11222 NNNNNN
yuyFuyFQ ϕ++=
−−−−−
. (4.44)
Пользуясь снова принципом оптимальности, можем сказать, что лишь значение
2−N
y и
цель управления (минимизация Q
N –2
) определяют оптимальное управление u
N –2
и u
N –1
на
рассматриваемом участке траектории. Но минимум по u
N –1
и, следовательно, само оптима-
льное значение u
N –1
= u
*
N –1
уже были найдены для каждого возможного значения
1−N
y .
Это позволяет с учетом того, что первое слагаемое (4.44) не зависит от u
N –1
, а два вторых
равны Q
N –1
записать
(
)()
[
]
11222
)(
22
,minmin)(
)()(
2
1
2
−−−−−
Ω∈
−−
+
=
=
Ω∈Ω∈
−
−
−
NNNNN
uu
NN
ySuyFQyS
uuuu
N
N
N
.
С учетом (4.41) при k = N–2 получим
(
)
(
)
[
]
{}
22212222
,,min)(
)(
2
−−−−−−−−
+
+
=
Ω∈
−
NNNNNNNN
uyfySuyFyS
uu
N
. (4.45)
Минимизация здесь производится также по одному переменному u
N –2
. При этом опреде-
ляются оптимальное значение управления u
*
N –2
и минимум функции Q
N –2
, равный S
N –2
.
Значение S
N –2
заносится в память компьютера, а S
N –1
стирается. Как u
*
N –2
, так и S
N –2
явля-
ются функцией
2−N
y . Продолжая аналогичным образом, получим рекуррентную формулу
вида
(
)
(
)
[
]
{}
.,,min)(
1
)(
kNkNkNkNkNkNkNkN
uyfySuyFyS
uu
kN
−−−+−−−−−
+
+
=
Ω∈
−
(4.46)
Выражение (4.46) называется уравнением динамического программирования в дискретной
форме.
Важно отметить, что оптимальное управление u
*
N – k
минимизирует все выражение в фи-
гурной скобке (4.46), а не одно лишь первое слагаемое F
N – k
. Стратегия, в которой каждое
значение u
N – k
выбиралось бы путем оптимизации лишь соответствующего слагаемого F
N –
k
, не является оптимальной, так как не учитывает конечной цели управления.
Вычисляя по формуле (4.46) последовательно значение S
N–k
и соответствующие u
*
N – k
, по-
лучим, наконец, значение управляющего воздействия, требуемое в начальный момент
времени u
*
(0) и минимальное значение критерия эффективности S(0). На этом процедура
отыскания оптимального управления заканчивается.
Весь процесс решения без затруднений переносится на объект управления, описываемый
дифференциальным уравнением любого порядка с любым числом выходных координат
системы и управляющих воздействий. Нужно лишь заменить скаляры
y , u в выражении
(4.46) векторами
y
,
u
, а функцию f – вектор-функцией
f
.
Как показал А.М.Летов, уравнение динамического программирования может быть записа-
но и в непрерывной форме.
449
Учитывая, что левая часть выражения (4.46) не зависит от управления, величину S
N–k
можно перенести в правую часть под знак минимума. Тогда (4.46) можно записать в виде
()
0,min
1
)(
=
⎭
⎬
⎫
⎩
⎨
⎧
Δ
Δ
−
+
−+−
−−
Ω∈
−
y
y
SS
uyF
kNkN
kNkN
uu
kN
(4.47)
Произведя предельный переход при 0→
Δ
y и учтя, что ),( uyfy
=
Δ
, запишем (4.47) в не-
прерывной форме:
()
0),(
)(
,min
)(
=
⎥
⎦
⎤
⎢
⎣
⎡
+
Ω∈
uyf
dy
ydS
uyF
uu
. (4.48)
Для получения минимума выражения, стоящего в квадратных скобках, в уравнении (4.48),
его нужно продифференцировать по управлению. Тогда условие минимума (4.48) можно
заменить системой уравнений
()
0),(
)(
, =+ uyf
dy
ydS
uyF ;
(
)
0
)(),(,
=
∂
∂
+
∂
∂
dy
ydS
u
uyf
u
uyF
.
(4.49)
Решение системы (4.49) позволяет найти зависимость u = ϕ(
y ), при которой реализуется
оптимальное управление в смысле минимизации критерия (4.40). Для этого сначала из
второго уравнения системы (4.49) определяется величина
,/)( dyydS а затем искомая за-
висимость u = ϕ(
y ).
В случае, если система имеет n выходных координат
n
yyy ,...
1
= и r управлений
r
uuu ,...
1
= , имеем
()
0),(
)(
,min
1
)(
=
⎭
⎬
⎫
⎩
⎨
⎧
∂
∂
+
∑
=
Ω∈
uyf
y
yS
uyF
i
n
i
i
uu
. (4.50)
или
()
0),(
)(
,
1
=
∂
∂
+
∑
=
uyf
y
yS
uyF
i
n
i
i
;
(
)
0
),(
)(,
111
=
∂
∂
∂
∂
+
∂
∂
∑∑∑
===
j
i
n
i
r
j
i
r
j
j
u
uyf
y
yS
u
uyF
.
(4.51)
Система уравнений (4.51) является наиболее распространенной формой записи уравнений
динамического программирования в непрерывной форме. Заметим, что функция
)( yS
должна быть непрерывной и дифференцируемой по
i
y
. При этом
i
yyS ∂∂ )( играет ту же
роль, что и неопределенный множитель
i
λ
в вариационной задаче на условный экстремум.
Уравнения
),(/ uyfdtdy
ii
= аналогичны уравнениям связи.
Пример 4.5. Пусть требуется провести трубопровод энергоносителя между пунктами О и
Т таким образом, чтобы стоимость прокладки была минимальной. Это статическая вариа-
ционная задача. Так как прокладка осуществляется на участке территории, ограниченном
по различным причинам, и математическое описание местности отсутствует, то для ре-
шения задачи целесообразно воспользоваться рекуррентным соотношением (4.46).
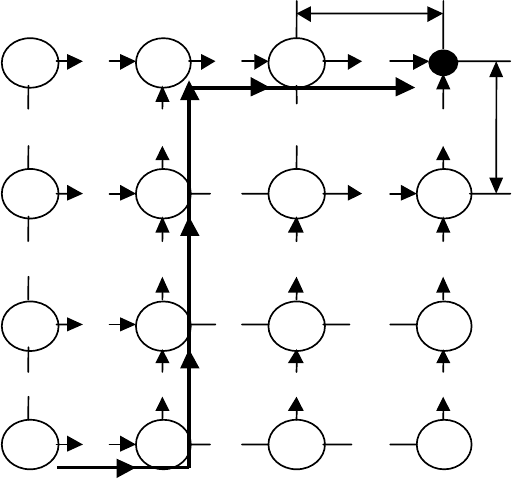
Решение. Разобьем путь между О и Т на несколько горизонтальных и вертикальных уча-
стков с интервалом Δ, т.е. дискретизируем задачу (рис.4.9). Стоимость строительства на
каждом участке F
N–k
можно подсчитать заранее с помощью топографической карты и
другой априорной информации. На рис. 4.9 эта стоимость приведена в условных едини-
цах.
450
Т
3
8
25
10
37
46
44
5
3
8
26
24
37
39
54
52
59
13
15
10
14
18
8
10
7
11
1
6
8
8
17 1
5
9
16
18
9 9
16
7
11
18
O
2
1
−
N
1
1
−
N
3
1
−
N
1
2
−
N
4
2
−
N
3
2
−
N
2
2
−
N
3
4
−
N
2
3
−
N
5
3
−
N
4
3
−
N
3
3
−
N
6
4
−
N
5
4
−
N
4
4
−
N
12
Δ
Δ
N
Рис. 4.9
Решение задачи начинаем с конечного пункта Т (точка N). В точку N можно попасть за
один последний шаг либо из точки N
1
–1 либо из N
2
–1. Заметим, что из каждой из этих то-
чек можно попасть в точку N только одним способом, т.е. на последнем шаге имеем
единственное управление u
N –1
. Примем, что в связи с окончанием строительства в точке N
затраты в этой точке минимальны и равны нулю, т.е.
ϕ
( y
N
) = 0. Тогда в соответствии с
(4.43) получим
2,1),()(minmin
111111
)()(
11
=
=
=
=
−−−−−−
Ω∈Ω∈
−−
iyFyFQS
iiii
i
N
i
i
N
i
NNNNNN
uu uu
.
Таким образом можно определить затраты на последнем участке и записать их в память
компьютера (на рис.4.9 численное выражение затрат указано в кружках). Перейдем к
предпоследнему участку строительства (от точек N
i
–2 до N
i
–1). Из точек N
1
–2 и N
3
–2, как
и ранее, есть только один путь в точку N
i
–1, а для точки N
2
–2 таких путей, а следователь-
но, и управлений
1
2
−N
u уже два. Вычислим затраты на предпоследний шаг с учетом затрат
на последний:
;251015)(
122
111
=+=+=
−−− NNN
SyFS ;24816)(
122
233
=
+
=
+
=
−−− NNN
SyFS
2
2
2221222
2221222
)
(
min{(,) [ (,)]}
N
NNNNNNN
uu
SFyuSyfyu
−
−−−−−−−
∈Ω
=++
.26
26818
281018
min
)(
2
2
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=+
=+
=
Ω∈
−
uu
N
Полученные результаты заносятся в память компьютера. Заметим, что путь из точки N
2
–2
в точку N, минимизирующий затраты
2−N
Q , соответствует управлению, при котором тру-
бопровод прокладывается в точку N
2
–1, а путь через точку N
1
–1 исключается из дальней-
шего рассмотрения.
Аналогично, переходя к последующим точкам, минимизируем на каждом шаге величину
Q
N–k
, отбрасывая неоптимальные траектории. Попав, наконец, в точку О и двигаясь от нее
к точке N, найдем траекторию, оптимальную для всего трубопровода (на рис.4.9 выделена
сплошной линией).
Исключение неоптимальных траекторий по мере движения от Т к О существенно упроща-
ет расчет по сравнению с методом простого перебора траекторий (в нашем случае
количе-
ство арифметических операций уменьшается более чем на порядок).
451
Пример 4.6. Пусть объект управления описывается уравнением вида
).,( uyfmuby
d
t
dy
=+=
Найти управление u, при котором минимизируется функционал
∫∫
∞∞
+==
0
22
0
)(),( dtuydtuyFQ
γ
.
В данном случае второе слагаемое в подынтегральном выражении функционала учитыва-
ет требование ограничения управления как по величине, так и по мощности.
Решение. Воспользуемся уравнениями Беллмана (4.49). Для рассматриваемого примера
эти уравнения примут вид
;0)(
22
=+++
dy
dS
mubyuy
γ
.02 =+
dy
dS
mu
γ
(4.52)
Исключив dS/dy, получим уравнение
02
22
=−+ mybyuum
γγ
,
решив которое относительно u, найдем
;kyu
−
=
γ
1
2
2
++=
m
b
m
b
k
.
Здесь решение со знаком минус перед корнем отброшено как не отвечающее требованиям
устойчивости.
Для нахождения минимального значения критерия воспользуемся вторым уравнением
системы (4.52)
()
2
0
2
0
2
min yy
m
kkydy
m
SQ
y
y
−===
∞
∫
∞
γγ
,
где
∞
y ,
0
y – заданные граничные значения выходной координаты y.
Принцип максимума
Принцип максимума был обоснован в работах Л.С.Понтрягина и его учеников как необ-
ходимый и достаточный признак оптимального процесса для линейных систем управле-
ния и необходимый для нелинейных.
Хотя принцип максимума был выведен самостоятельно, позже было доказано, что между
ним и принципом оптимальности Беллмана существует прямая связь. Для упрощения вы
-
кладок выведем принцип максимума, воспользовавшись уравнением Беллмана (4.50).
Введем новую координату
;),(
0
0
dtuyFQy
T
∫
== ).,(),(
0
0
uyfuyF
dt
dy
==
Тогда
nn
ffffyyyy ,,,;,,,
1010
KK ==
и уравнение (4.50) можно переписать в виде
,0),(
)(
min
0
)
(
=
⎭
⎬
⎫
⎩
⎨
⎧
⋅
∂
∂
∑
=
Ω∈
uyf
y
yS
i
n
i
i
uu
(4.53)
где
.1/)(
0
=∂∂ yyS
452
Учтем, что max(–
y
) = –min(
y
) . Тогда (4.53) примет вид
.0),(
)(
max
0
0
)(
=
⎭
⎬
⎫
⎩
⎨
⎧
∂
∂
−
∑
=
Ω∈
uyf
y
yS
n
i
i
uu
(4.54)
Обозначим
ii
yyS ∂∂−=ψ )( , тогда
n
n
,,,
y
yS
y
yS
ψψψ=
∂
∂
−
∂
∂
−−=ψ KK
10
1
)(
,,
)(
,1
и (4.54) запишется в виде
,0maxmax
)
0
)
(
(
=⋅=
Ω∈
Ω∈
∑
=
ff
uu
uu
n
i
ii
ψψ
(4.55)
где
f⋅ψ – скалярное произведение двух векторов.
Выражение (4.55) и есть математическая запись принципа максимума Понтрягина.
Заметим, что при применении метода динамического программирования (в непрерывной
форме) необходимо предварительно найти функцию
)( yS , что связано с громоздкими
операциями, в частности, с решением дифференциальных уравнений в частных производ-
ных. Для применения принципа максимума необходимо знать значение вектора
ψ , кото-
рое можно найти значительно проще, решив так называемые сопряженные уравнения
.,0; ni
y
f
dt
d
i
i
=
∂
⋅∂
−=
ψ
ψ
(4.56)
Систему уравнений (4.56) можно получить, взяв полную производную функции многих
переменных
)( yS . Действительно, учтя, что ()/
ii
Sy y
ψ
=
−∂ ∂ , имеем:
i
n
j
i
jjj
i
n
j
ji
i
y
f
y
f
dt
dy
y
yS
yy
yS
dt
d
dt
d
∂
⋅∂
−=
∂
⋅∂
−=⋅
∂
∂
⋅
∂
∂
−=
∂
∂
−=
∑∑
==
ψ
ψ
ψ
00
)()(
Часто уравнения (4.55) и (4.56) записывают в более компактной форме, обозначая скаляр-
ное произведение векторов
ψ и ),( uyf через Н:
0),,(max
)(
=
Ω∈
uyH
uu
ψ
, (4.57)
.
i
i
y
H
dt
d
∂
∂
−=
ψ
(4.58)
Учитывая, что
∑∑
==
ψ=ψ=
n
i
i
i
n
i
ii
dt
dy
fH
00
, и взяв производную от H по ψ
i
, можно записать
.
i
i
H
dt
dy
ψ∂
∂
=
(4.59)
Система уравнений (4.58)-(4.59) представляет собой канонически сопряженную систему
типа известной из механики системы уравнений Гамильтона:
,;
P
A
d
t
dA
d
t
dP
∂
∂
=
∂
∂
−=
l
l
где A – полная энергия системы, затрачиваемая на перемещение тела на расстояние ℓ; P –
импульс силы.