Wai-Fah Chen.The Civil Engineering Handbook
Подождите немного. Документ загружается.


29-20 The Civil Engineering Handbook, Second Edition
29.25). With commonly available software tools, such as spreadsheets, Eq. (29.28) can be readily solved
for one variable if the remaining two variables are known. The Moody diagram also permits a graphical
solution. If Re and k
s
/D are known, the curve corresponding to the given k
s
/D is found, and the value of
f corresponding to the given Re on that curve can be immediately read.
For non-circular conduits or open-channel flows, Eq. (29.28) (or the Moody diagram) can be used as
an approximation by substituting an effective diameter, D
eff
= 4R
h
for D, in determining the relative roughness
and the Reynolds number. In some problems, k
s
/D and/or Re may not be directly available, because the
discharge, Q, or the pipe diameter, D, is to be determined. For such problems, an iterative solution is
required, which can either be graphical using the Moody diagram or be accomplished via software.
Other traditional formulae describing flow resistance in conduits, intended for use with water only,
are encountered in practice. The Chezy-Manning equation is used frequently in open-channel flows and
is discussed more fully in that chapter. The Hazen-Williams equation is frequently used in the waterworks
industry, and is discussed in the chapter on hydraulic structures. These equations, while convenient,
approximate the more generally applicable Colebrook-White-type formulae only over a restricted range
of Re and k
s
/D. In practice, this may be compensated by judiciously adjusting the relevant empirical
coefficients to particular situations.
Minor Losses
Head losses that are caused by localized disturbances to a flow, such as by valves or pipe fittings or in
open-channel transitions, are traditionally termed minor losses, and will be denoted by h
m
as distinct
from continuous head losses denoted previously by h
f
. Because they are not necessarily negligible, a more
precise term would be transition or local losses, because they occur at transitions from one fully developed
flow to another. Being due to localized disturbances, they do not vary with the conduit length, but are
instead described by an overall head loss coefficient, K
m
. The greater the flow disturbance, the larger the
value of K
m
; for example, as a valve is gradually closed, the associated value of K
m
for the valve increases.
Similarly, K
m
for different pipe fittings will vary somewhat with pipe size, decreasing with increasing pipe
size, since fittings may not be geometrically similar for different pipe sizes. Values of K
m
for various types
of transitions are tabulated at the end of this chapter. An alternative treatment of minor losses replaces
the sources of the minor losses by equivalent lengths of pipes, which are often tabulated. In this way, the
problem is converted to one with entirely continuous losses, which may be computationally convenient.
The total head loss, h
L
, of Eq. (29.18) consists of contributions from both friction and transition losses:
(29.29)
In some problems with long pipe sections and few instances of minor losses, such that fL/D K
m
, minor
losses may be indeed minor and therefore negligible.
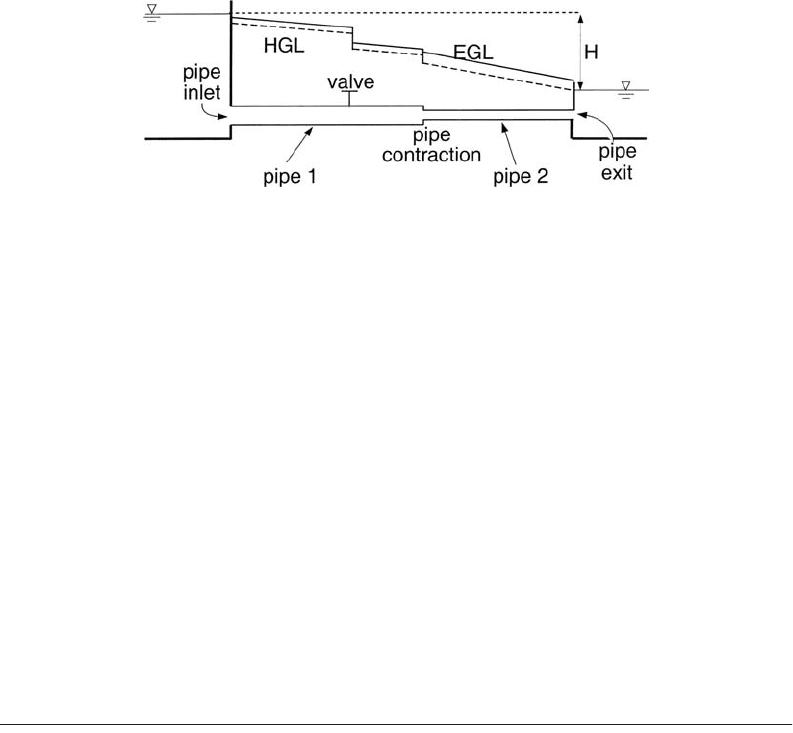
Application 12: A Piping System with Minor Losses
Consider a flow between two reservoirs through the pipe system shown in Fig. 29.17. If the difference
in elevation between the two reservoirs is H, what is the discharge, Q? The energy equation between the
two free surfaces yields h
L
= H, since pressure and velocity heads are zero at the reservoir (control)
surfaces. The total head loss consists of friction losses in pipe 1 and pipe 2, as well as minor losses at the
entrance, the valve, the contraction, and the submerged exit:
hhh
fL
D
V
g
K
V
g
Lfm
j
j
j
m
i
i
i
=+=
Ê
Ë
Á
ˆ
¯
˜
+
()
ÂÂ
2
2
22
hH
Q
g
fL
DA
fL
DA
KK
A
KK
A
L
mm m m
==
Ê
Ë
Á
ˆ
¯
˜
È
Î
Í
Í
+
Ê
Ë
Á
ˆ
¯
˜
+
()
+
()
{}
+
()
+
()
{}
˘
˚
˙
2
11
11
2
22
22
2
1
2
2
2
2
11
11
entrance valve contraction exit
© 2003 by CRC Press LLC
Fundamentals of Hydraulics 29-21
where the subscripts refer to pipes 1 and 2. The minor loss coefficients are obtained from tabulated values,
e.g., from Table 29.8 at the end of this chapter, (K
m
)
entrance
= 0.5. The friction factors, f
1
and f
2
, may differ
since Re and k
s
/D may differ in the two pipes. Because Q is not known, neither Re
1
nor Re
2
can be computed,
and hence neither f
1
nor f
2
can be directly determined from the Moody diagram: an iterative solution is
necessary if the Moody diagram is used. With an algebraic relationship for the friction factors, such as
Eq. (29.28), a simultaneous solution of the resulting nonlinear system of equations can be performed to
obtain Q. If an iterative graphical solution with the Moody diagram is undertaken, initial guesses of f
1
and
f
2
would be made, which would permit the evaluation of Q, and hence Re
1
and Re
2
could be estimated.
The friction factors corresponding to the thus estimated values of Re
1
and Re
2
are then checked for
consistency with the initial guesses for f
1
and f
2
; if they are in reasonable agreement, then a solution has
been found, otherwise the iterative procedure continues with additional guesses for f
1
and f
2
until consis-
tency is achieved. The HGL and EGL run parallel to each other in the two pipes; the distance between
them is however larger in pipe 2 because of the larger velocity head (due to the smaller pipe diameter).
The energy slope is constant for each pipe section, but will generally differ in the two pipe sections, with
the slope being larger in the case of the pipe with the smaller pipe due to larger velocity (S
f
µ V
2
). The
losses at transitions, shown as abrupt drops in the grade lines, are exaggerated for visual purposes.
29.8 Hydrodynamic Forces on Submerged Bodies
Bodies moving in fluids or stationary bodies in a moving fluid experience hydrodynamic forces in addition
to the hydrostatic forces discussed in Section 29.3. A net force in the direction of mean flow is termed a
drag force, while a net force in the direction normal to the mean flow is termed a lift force. These are
described in terms of dimensionless coefficients of drag or lift, defined as C
D
= F
D
/[(rU
2
/2)A
p
] and C
L
=
F
L
/[(rU
2
/2)A
p
], where the drag force, F
D
, and the lift force, F
L
, have been made dimensionless by the product
of the dynamic pressure, rU
2
/2, where U is the approach velocity (assumed constant) of the fluid, and the
projected area, A
p
, of the body. In hydraulics, the drag force is usually of greater interest, as in the deter-
mination of the terminal velocity of sediment or of gas bubbles in the water column, or loads on structures.
The contribution due to skin friction drag, because of shear stresses on the body surface, is distinguished
from that due to form drag (also termed pressure drag), stemming from normal stresses (pressure) on the
body surface. At low Re (based on the relative velocity of body and fluid) or in flows around streamlined
bodies, skin friction drag will dominate, while in high Re flows around bluff bodies, flow separation will
occur and, with the formation of the low-pressure wake region, form drag will dominate.
The Standard Drag Curve
Theoretical results are available only for low Re flows around bodies with simple geometrical shapes. For
steady flow around solid spheres in a fluid of infinite extent and Re Æ 0, then C
D
= 24/Re, where Re
UD/n, where U is the relative velocity of body in a fluid with kinematic viscosity, n, and D is the diameter
of the sphere. In this so-called Stokes flow regime, where Re <1, the terminal velocity of a solid sphere, w
T
,
FIGURE 29.17 A pipe system with minor (transitional) losses.
© 2003 by CRC Press LLC
29-22 The Civil Engineering Handbook, Second Edition
i.e., the steady velocity it attains when falling under gravity in a stagnant fluid of infinite extent, is given
by w
T
= g(s
s
– s
f
)D
2
/(18n), where s
s
and s
f
are respectively the specific gravities of the body and the fluid.
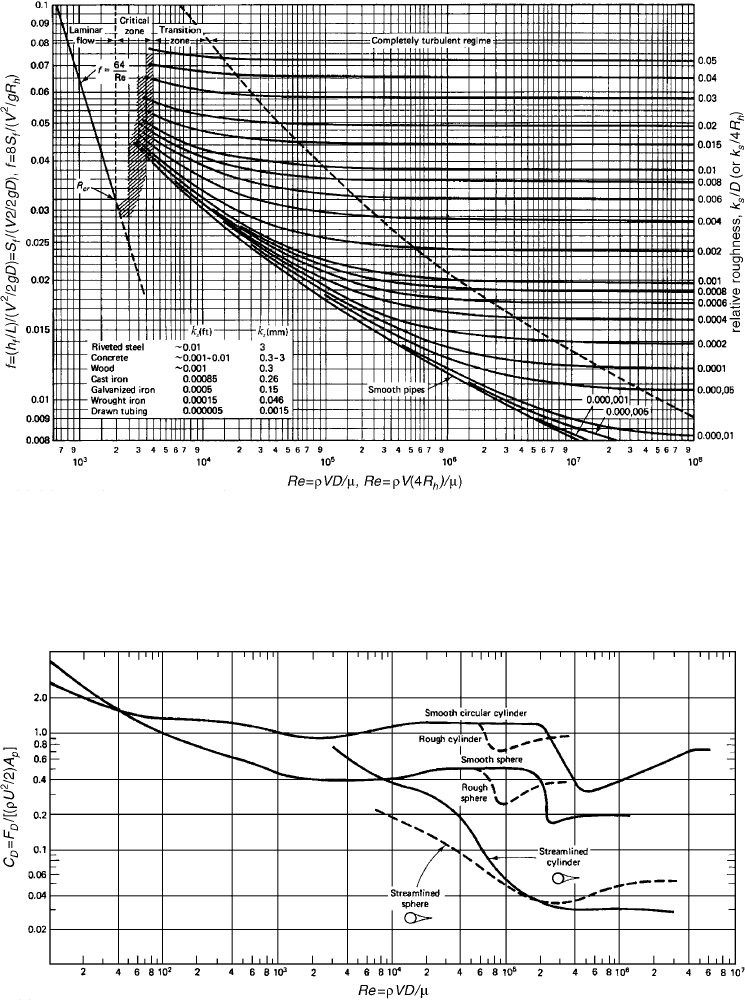
For larger Re and for more complicated geometries, empirical correlations for C
D
as a function of Re and
other factors such as relative roughness must be used. A standard drag curve (such as Fig. 29.23 at the
end of this chapter), which plots C
D
vs Re is available for common geometries, such as spheres or infinitely
long circular cylinders. In these cases, C
D
exhibits a form of limited high Re similarity (see Sections 29.6
and 29.7) in the range, 10
3
< Re < 10,
5
where it attains an approximately constant value: C
D
ª 0.5 for
smooth spheres, and C
D
ª 1 for smooth infinitely long circular cylinders. For high Re flows around bluff
bodies without sharp edges to fix the separation point, C
D
undergoes an abrupt decrease at a critical value
of Re because the separation point on the body moves downstream, resulting in a narrower low-pressure
wake region, and hence lower drag and smaller C
D
. For a smooth sphere or a smooth infinitely long
cylinder, the critical value is observed to be ª 2 ¥ 10,
5
but surface roughness will decrease this critical value.
Application 13: Terminal Velocity of a Solid Sphere
Consider a metal sphere (density, r
s
, and diameter, D), falling under gravity in a fluid (density, r, and
kinematic viscosity, n). When the sphere attains its terminal velocity, w
T
, its effective weight (including
hydrostatic buoyancy effects), g(r
s
– r)(pD
3
/6), is balanced by the drag force, F
D
= C
D
(rw
2
T
/2)A
p
, where
the projected area is taken to be A
p
= pD
2
/4, so that w
T
= . Since C
D
varies
with Re w
T
D/n, and w
T
is unknown, the standard drag curve (in its graphical form) cannot be used
directly, and an iterative procedure is necessary to determine w
T
. As usual, the iterative solution might
begin with an initial guess for C
D
, from which a w
T
and a Re can be computed. A solution is obtained
when the computed Re is consistent with the guessed C
D
in agreeing with the standard drag curve.
29.9 Discharge Measurements
Discharge measurements are made for monitoring and control purposes. Measurement methods may be
divided into those for pipe and those for open-channel flows. The following summarizes some results
for both types.
Pipe Flow Measurements
Traditional methods for measurements of discharge, Q, in a pipe of diameter, D, and cross-sectional area,
A, have depended on the production of a pressure difference, Dp, across a device constricting the flow.
Foremost among such devices are various types of orifice and Venturi meters, the basic theory of which
has been outlined in Appendixes 5 and 6.
In general, Q is related to the difference in piezometric head across the device, Dh, by
(29.30)
where A
o
is cross-sectional area of the contraction, and b = d/D, d being the diameter of the contracted
section. The discharge coefficient, C
d
, may vary according to the device, the exact location of the pressure
taps where the measurements are made, b and Re. The head loss across the device, h
m
, is given as fraction
of measured differential pressure head.
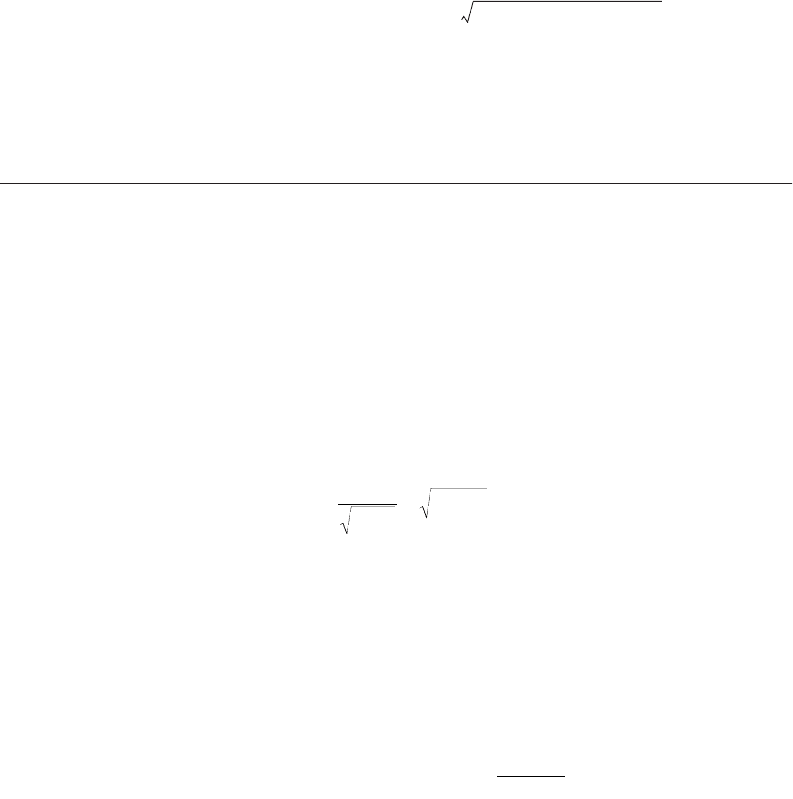
The common thin-plate orifice meter is square-edged and concentric with the pipe (Fig. 29.18a). It is
used for clean fluids and is inexpensive, but is associated with relatively high head loss. Miller (1989)
gives a correlation for C
d
for an orifice with corner taps:
(29.31)
4g r
s
r§()1–[]D 3C
D
()§
Q
C
Agh
d
o
=
-
()
1
2
4
b
D
C
Re
d
=+ - +0 5959 0 0312 0 184
91 71
21 8
25
075
.. .
.
.
.
.
bb
b
© 2003 by CRC Press LLC
Fundamentals of Hydraulics 29-23
and a correlation for h
m
as
(29.32)
These correlations are valid for 0.2 < b < 0.75 and 10
4
< Re < 10
7
.
In comparison to orifice meters, the Venturi meter (Fig. 29.18b) incurs low head losses, is suitable for
flows with suspended solids, and exhibits less variation in performance characteristics. Disadvantages
include higher initial cost and the length and weight of the device. C
D
for a Venturi meter ranges from
0.975 to 0.995 (for Re > 5 ¥ 10
4
), while h
m
/Dh varies with the exit cone angle as (Miller, 1989)
(29.33)
Various other flow meters are in use, and only a few are noted here. Elbow meters are based on the
pressure differential between the inner and the outer radius of the elbow. Attractive because of their low
cost, they tend to be less accurate than orifice or Venturi meters, because of a relatively small pressure
differential. Rotameters or variable-area meters are based on the balance between the upward fluid drag
on a float located in an upwardly diverging tube and the weight of the float. By the choice of float and
tube divergence, the equilibrium position of the float can be made linearly proportional to the flow rate.
More recently developed non-mechanical devices include the electromagnetic flow meter and the ultra-
sonic flow meter. In the former, a voltage is induced between two electrodes that are located in the pipe
walls but in contact with the fluid. The fluid must be conductive, but can be multiphase. The output is
linearly proportional to Q, independent of Re, and insensitive to velocity profile variations. Ultrasonic
flow meters are based on the transmission and reception of acoustic signals, which can be related to the
flow velocity. An attractive feature of some ultrasonic meters is that they can be clamped on to a pipe,
rather than being installed in place as is the case of most other devices.
Open-Channel Flow Measurements
Open-channel flow measurements are typically based on measurements of flow depth, which are then
correlated with discharge in head-discharge curves. The most common measurement structures may be
divided into weirs and critical-depth (Venturi) flumes. Weirs are raised obstructions in a channel, with
the top of the obstruction being termed the crest. The streamwise extent of the weir may be short or
long, corresponding to sharp-crested and broad-crested weirs respectively. A critical-depth flume is a
constriction built in an open channel, which causes the flow to become critical (Fr = 1, see the discussion
FIGURE 29.18 Pipe flow-measuring devices. (a) Thin-plate orifice with corner pressure taps. (b) Venturi tube.
h
h
m
D
=- - -1024 052016
23
.. .bb b
h
h
m
D
=-+ =∞
=-+ =∞
0 436 0 83 0 59 15
0 218 0 42 0 38 7
2
2
...
...
bb q
bb q
© 2003 by CRC Press LLC
29-24 The Civil Engineering Handbook, Second Edition
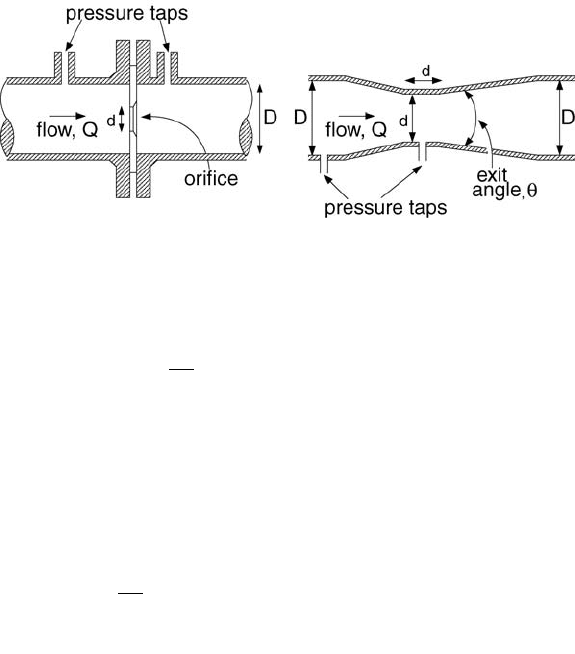
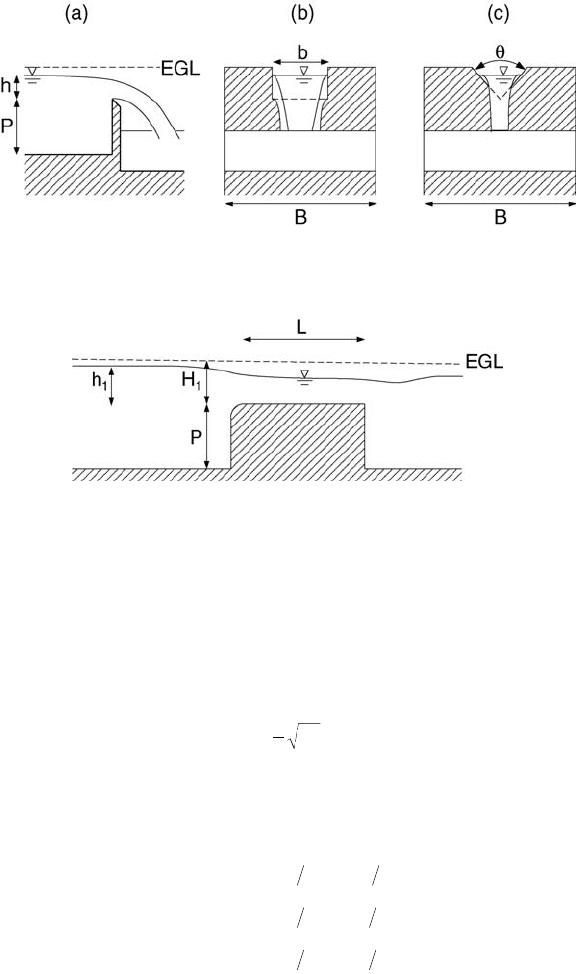
of critical flows in the section on open-channel flows) in, or near, the throat of the flume. As shown in
Fig. 29.20a, the width of the channel will be denoted by B, the height of the weir crest above the channel
bottom is P, and the upstream elevation of the free surface relative to the weir crest is h. The fluid is
assumed to be water, and viscous and surface tension effects are assumed negligible.
For a rectangular sharp-crested weir (Fig. 29.19b, see also Application 7), the head-discharge formula
may be expressed as
(29.34)
where b is the width of the weir opening, and C
d
is a discharge coefficient that varies with b/B and h/P
as (Bos, 1989)
(29.35)
Equation (29.35) should give good results if h > 0.03 m, h/P < 2, P > 0.1 m, b > 0.15 m, and the water
surface level downstream of the weir should be at least 0.05 m below the crest. For contracted weirs
(b/B < 1), an alternative treatment of the effect of b/B uses an effective weir width, b
eff
, that is reduced
relative to the actual width, b. Further, the weir formula, Eq. (29.34), is often expressed as Q = C
weir
b
eff
h
3/2
,
where C
weir
is a weir coefficient that varies with the system of units.
The triangular or V-notch weir (Fig. 29.19c) is often chosen when a wide range of discharges is expected,
since it is able to remain fully aerated at low discharges. The head-discharge formula for a triangular
opening with an included angle, q, may be expressed as
FIGURE 29.19 Open-channel discharge measurement structures. (a) Side view of a sharp-crested weir. (b) Front
view of a rectangular weir. (c) Front view of a triangular (V-notch) weir.
FIGURE 29.20 Broad-crested weir.
QC gbh
d
=
Ê
Ë
Á
ˆ
¯
˜
2
3
2
32/
ChPbB
hP bB
hP bB
d
=+
()
=
=+
()
=
=-
()
=
0 602 0 075 1
0 593 0 018 0 6
0 588 0 002 0 1
.. ,
.. , .
.. , .
© 2003 by CRC Press LLC
Fundamentals of Hydraulics 29-25
(29.36)
If h/P £ 0.4 and (h/B) tan(q/2) £ 0.2, then the discharge coefficient, C
dV
varies only slightly with q,
C
dV
= 0.58 ± 0.01 for 25° < q < 90° (Bos, 1989). It is also recommended that h > 0.05 m, P > 0.45 m,
and B > 0.9 m.
Under field conditions, where sharp-crested weirs may present maintenance problems, the broad-
crested weir (Fig. 29.20) provides a more robust structure. It relies on the establishment of critical flow
(see the chapter of open-channel flows for a discussion of critical flows) over the weir crest. In order to
justify the neglect of frictional effects and the assumption of hydrostatic conditions over the weir, the
length of the weir, L, should satisfy 0.07 £ H
1
/L £ 0.5, where H
1
is the upstream total head referred to
elevation of the weir crest. The head-discharge formula may be expressed as
(29.37)
where C
dB
is a discharge coefficient, and C
V
is a coefficient to account for a non-negligible upstream
velocity head (C
V
≥ 1, and C
V
= 1 if the approach velocity is neglected in which case H
1
= h; a graphical
correlation for C
V
is given in Bos, 1989). Bos (1989) recommends that C
dB
= 0.93 + 0.10(H
1
/L).
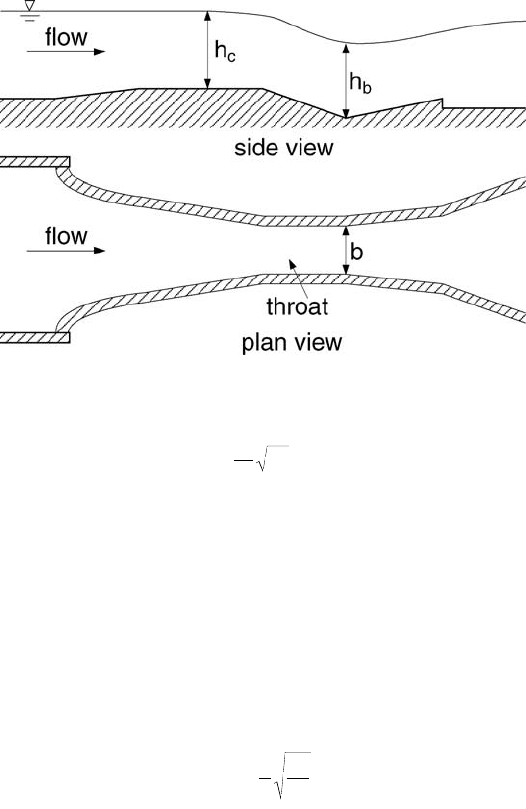
In situations where deposition of silt or other debris may pose a problem, a critical-depth flume may
be more appropriate than a weir. Since it too is based on the establishment of critical flow in the throat
of the flume, its approximate theoretical analysis is essentially the same. The most common example is
the Parshall flume (Fig. 29.21), which resembles a Venturi tube in having a converging section with a
level bottom, a throat section with a downward sloping bottom, and a diverging section with an upward
sloping bottom. The dimensioning of the Parshall flume is standardized; as such the calibration curve
for each size (e.g., defined by the throat width) is different, since the different sizes are not geometrically
similar. The head-discharge relation is typically expressed in terms of a piezometric head, h
c
, at a
prescribed location in the converging section, which is different for each size. This relationship is given
by Q = Kh
m
c
,where the exponent, m, ranges from 1.52 to 1.6, and the dimensional coefficient, K, varies
with the size of the throat width, b
c
, with K ranging from 0.060 for b
c
= 1 in to 35.4 for b
c
= 50 ft. More
detailed information concerning K can be found in Bos (1989).
FIGURE 29.21 Critical-depth or Venturi flume (Parshall type).
QC gh
dV
=
Ê
Ë
Á
ˆ
¯
˜
8
15
2
52/
tanq
QCC
g
bh
dB V
=
Ê
Ë
Á
ˆ
¯
˜
2
3
2
3
32/
© 2003 by CRC Press LLC
29-26 The Civil Engineering Handbook, Second Edition
FIGURE 29.22 The Moody diagram. Adapted from Potter, M.C. and Wiggert, D.C. (1997). Mechanics of Fluids,
2nd ed., Prentice-Hall, Englewood Cliffs, NJ.
FIGURE 29.23 Drag coefficients for flow around various bluff bodies. Source: Potter, M.C. and Wiggart, D.C.
(1997). Mechanics of Fluids, 2nd ed., Prentice-Hall, Englewood Cliffs, NJ.
© 2003 by CRC Press LLC
Fundamentals of Hydraulics 29-27
TA BLE 29.1 Physical Properties of Water in SI Units*
Te m p e r ature,
°F
Specific
We ig ht y,
lb/ft
3
Density
r,
slugs/ft
3
Viscosity
m ¥ 10
5
,
lb·s/ft
2
Kinematic
Viscosity
n ¥ 10
5
,
ft
2
/s
Surface
Te nsion
s ¥ 10
2
lb/ft
Va po r
Pressure
p
u
,
psia
Va po r
Pressure
Head
p
u
/g,
ft
Bulk
Modulus
of Elasticity
E
u
¥ 10
–3
,
psi
0 9.805 999.8 1.781 1.785 0.0756 0.61 0.06 2.02
5 9.807 1000.0 1.518 1.519 0.0749 0.87 0.09 2.06
10 9.804 999.7 1.307 1.306 0.0742 1.23 0.12 2.10
15 9.798 999.1 1.139 1.139 0.0735 1.70 0.17 2.14
20 9.789 998.2 1.002 1.003 0.0728 2.34 0.25 2.18
25 9.777 997.0 0.890 0.893 0.0720 3.17 0.33 2.22
30 9.764 995.7 0.798 0.800 0.0712 4.24 0.44 2.25
40 9.730 992.2 0.653 0.658 0.0696 7.38 0.76 2.28
50 9.689 988.0 0.547 0.553 0.0679 12.33 1.26 2.29
60 9.642 983.2 0.466 0.474 0.0662 19.92 2.03 2.28
70 9.589 977.8 0.404 0.413 0.0644 31.16 3.20 2.25
80 9.530 971.8 0.354 0.364 0.0626 47.34 4.96 2.20
90 9.466 965.3 0.315 0.326 0.0608 70.10 7.18 2.14
100 9.399 958.4 0.282 0.294 0.0589 101.33 10.33 2.07
*In this table and in the others to follow, if m ¥ 10
5
= 3.746 then m = 3.746 ¥ 10
–5
lb·s/ft
2
, etc. For example, at 80°F, s ¥
10
2
= 0.492 or s = 0.00492 lb/ft and E
u
¥ 10
–3
= 322 or E
u
= 322,000 psi.
From Daugherty, R.L., Franzini, J.B., and Finnemore, E.J. (1985) Fluid Mechanics with Engineering Applications, 8th ed.,
McGraw-Hill, New York. With permission.
TA BLE 29.2 Physical Properties of Water in English Units
Te m p e r ature,
°C
Specific
We ig ht y,
kN/m
3
Density
r,
kg/m
3
Viscosity
m ¥ 10
3
,
N·s/m
2
Kinematic
Viscosity
n ¥ 10
6
,
m
2
/s
Surface
Te nsion
s,
N/m
Va po r
Pressure
p
u
,
kN/m
2
, abs
Va po r
Pressure
Head
p
u
/g,
m
Bulk
Modulus
of Elasticity
E
u
¥ 10
–6
,
kN/m
2
32 62.42 1.940 3.746 1.931 0.518 0.09 0.20 293
40 62.43 1.940 3.229 1.664 0.514 0.12 0.28 294
50 62.41 1.940 2.735 1.410 0.509 0.18 0.41 305
60 62.37 1.938 2.359 1.217 0.504 0.26 0.59 311
70 62.30 1.936 2.050 1.059 0.500 0.36 0.84 320
80 62.22 1.934 1.799 0.930 0.492 0.51 1.17 322
90 62.11 1.931 1.595 0.826 0.486 0.70 1.61 323
100 62.00 1.927 1.424 0.739 0.480 0.95 2.19 327
110 61.86 1.923 1.284 0.667 0.473 1.27 2.95 331
120 61.71 1.918 1.168 0.609 0.465 1.69 3.91 333
130 61.55 1.913 1.069 0.558 0.460 2.22 5.13 334
140 61.38 1.908 0.981 0.514 0.454 2.89 6.67 330
150 61.20 1.902 0.905 0.476 0.447 3.72 8.58 328
160 61.00 1.896 .838 0.442 0.441 4.74 10.95 326
170 60.80 1.890 0.780 0.413 0.433 5.99 13.83 322
180 60.58 1.883 0.726 0.385 0.426 7.51 17.33 318
190 60.36 1.876 0.678 0.362 0.419 9.34 21.55 313
200 60.12 1.868 0.637 0.341 0.412 11.52 26.59 308
212 59.83 1.860 0.593 0.319 0.404 14.70 33.90 300
From Daugherty, R.L., Franzini, J.B., and Finnemore, E.J. (1985) Fluid Mechanics with Engineering Applications, 8th ed.,
McGraw-Hill, New York. With permission.
© 2003 by CRC Press LLC
29-28 The Civil Engineering Handbook, Second Edition
TA BLE 29.3 Physical Properties of Air at Standard Atmospheric Pressure in English Units
Te m p e r ature
Density
r ¥ 10
3
,
slugs/ft
3
Specifc Weight
g ¥ 10
2
,
lb/ft
3
Viscosity
m ¥ 10
7
,
lb·s/ft
2
Kinematic Viscosity
n ¥ 10
4
,
ft
2
/s
T,
°F
T,
°C
–40 –40.0 2.94 9.46 3.12 1.06
–20 –28.9 2.80 9.03 3.25 1.16
0 –17.8 2.68 8.62 3.38 1.26
10 –12.2 2.63 8.46 3.45 1.31
20 –6.7 2.57 8.27 3.50 1.36
30 –1.1 2.52 8.11 3.58 1.42
40 4.4 2.47 7.94 3.62 1.46
50 10.0 2.42 7.79 3.68 1.52
60 15.6 2.37 7.63 3.74 1.58
70 21.1 2.33 7.50 3.82 1.64
80 26.7 2.28 7.35 3.85 1.69
90 32.2 2.24 7.23 3.90 1.74
100 37.8 2.20 7.09 3.96 1.80
120 48.9 2.15 6.84 4.07 1.89
140 60.0 2.06 6.63 4.14 2.01
160 71.1 1.99 6.41 4.22 2.12
180 82.2 1.93 6.21 4.34 2.25
200 93.3 1.87 6.02 4.49 2.40
250 121.1 1.74 5.60 4.87 2.80
From Daugherty, R.L., Franzini, J.B., and Finnemore, E.J. (1985) Fluid Mechanics with Engi-
neering Applications, 8th ed., McGraw-Hill, New York. With permission.
TA BLE 29.4 The ICAO Standard Atmosphere in SI Units
Elevation Above
Sea Level,
km
Te m p e r ature,
°C
Absolute
Pressure,
kN/m
2
, abs
Specific
We ig ht y,
N/m
3
Density
r,
kg/m
3
Specific
We ig ht y,
N·s/m
2
0 15.0 101.33 12.01 1.225 1.79
2 2.0 79.50 9.86 1.007 1.73
4 –4.5 60.12 8.02 0.909 1.66
6 –24.0 47.22 6.46 0.660 1.60
8 –36.9 35.65 5.14 0.526 1.53
10 –49.9 26.50 4.04 0.414 1.46
12 –56.5 19.40 3.05 0.312 1.42
14 –56.5 14.20 2.22 0.228 1.42
16 –56.5 10.35 1.62 0.166 1.42
18 –56.5 7.57 1.19 0.122 1.42
20 –56.5 5.53 0.87 0.089 1.42
25 –51.6 2.64 0.41 0.042 1.45
30 –40.2 1.20 0.18 0.018 1.51
From Daugherty, R.L., Franzini, J.B., and Finnemore, E.J. (1985) Fluid Mechanics
with Engineering Applications, 8th ed., McGraw-Hill, New York. With permission.
© 2003 by CRC Press LLC
Fundamentals of Hydraulics 29-29
TA BLE 29.5 Physical Properties of Common Liquids at Standard Atmospheric Pressure in English Units
Liquid
Te m p e r ature
T,
°F
Density
r,
slug/ft
3
Specific
Gravity,
s
Viscosity
m ¥ 10
5
,
lb·s/ft
2
Surface
Te nsion
s,
lb/ft
Va po r
Pressure
p
u
,
psia
Modulus of
Elasticity
E
u
,
psi
Benzene 68 1.74 0.90 1.4 0.002 1.48 150,000
Carbon tetrachloride 68 3.08 1.594 2.0 0.0018 1.76 160,000
Crude oil 68 1.66 0.86 15 0.002
Gasoline 68 1.32 068 0.62 …… 8.0
Glycerin 68 2.44 1.26 3100 0.004 0.000002 630,000
Hydrogen –430 0.14 0.072 0.043 0.0002 3.1
Kerosene 68 1.57 0.81 4.0 0.0017 0.46
Mercury 68 26.3 13.56 3.3 0.032 0.000025 3,800,000
Oxygen –320 2.34 1.21 0.58 0.001 3.1
SAE 10 oil 68 1.78 0.92 170 0.0025
SAE 30 oil 68 1.78 0.92 920 0.0024
Water681.936 1.00 2.1 0.005 0.34 300,000
From Daugherty, R.L., Franzini, J.B., and Finnemore, E.J. (1985) Fluid Mechanics with Engineering Applications,
8th ed., McGraw-Hill, New York. With permission.
TA BLE 29.6 Physical Properties of Common Liquids at Standard Atmospheric Pressure in SI Units
Liquid
Te m p e r ature
T,
°F
Density
r,
kg/m
3
Specific
Gravity,
s
Viscosity
m ¥ 10
4
,
N·s/m
2
Surface
Te nsion
s,
N/m
Va po r
Pressure
p
u
,
kN/m
2
, abs
Modulus of
Elasticity
E
u
¥ 10
–6
,
N/m
2
Benzene 20 895 0.90 6.5 0.029 10.0 1030
Carbon tetrachloride 20 1588 1.59 9.7 0.026 12.1 1100
Crude oil 20 856 0.86 72 0.03
Gasoline 20 678 0.68 2.9 …… 55
Glycerin 20 1258 1.26 14,900 0.063 0.000014 4350
Hydrogen –257 72 0.072 0.21 0.003 21.4
Kerosene 20 808 0.81 19.2 0.025 3.20
Mercury 20 13,550 13.56 15.6 0.51 0.00017 26,200
Oxygen –195 1206 1.21 2.8 0.015 21.4
SAE 10 oil 20 918 0.92 820 0.037
SAE 30 oil 20 918 0.92 4400 0.036
Water20998 1.00 10.1 0.073 2.34 2070
From Daugherty, R.L., Franzini, J.B., and Finnemore, E.J. (1985) Fluid Mechanics with Engineering Applications,
8th ed., McGraw-Hill, New York. With permission.
© 2003 by CRC Press LLC