Wai-Fah Chen.The Civil Engineering Handbook
Подождите немного. Документ загружается.

Theory and Analysis of Structures 47-141
For a nontrivial solution, we must have
(47.274)
The characteristic equation becomes
(47.275)
Since k cannot be zero, we must have cos kL = 0 or
(47.276)
The smallest root (n = 1) gives the lowest critical load of the column
(47.277)
The boundary conditions for columns with various end
conditions are summarized in Table 47.1.
Column Effective Length Factor
The effective length factor, K, of columns with different end
boundary conditions can be obtained by equating the P
cr
load
obtained from the buckling analysis with the Euler load of a
pinned-end column of effective length KL:
The effective length factor can be obtained as
(47.278)
The K factor is a factor that can be multiplied to the actual length of the end-restrained column to give
the length of an equivalent pinned-end column whose buckling load is the same as that of the end-
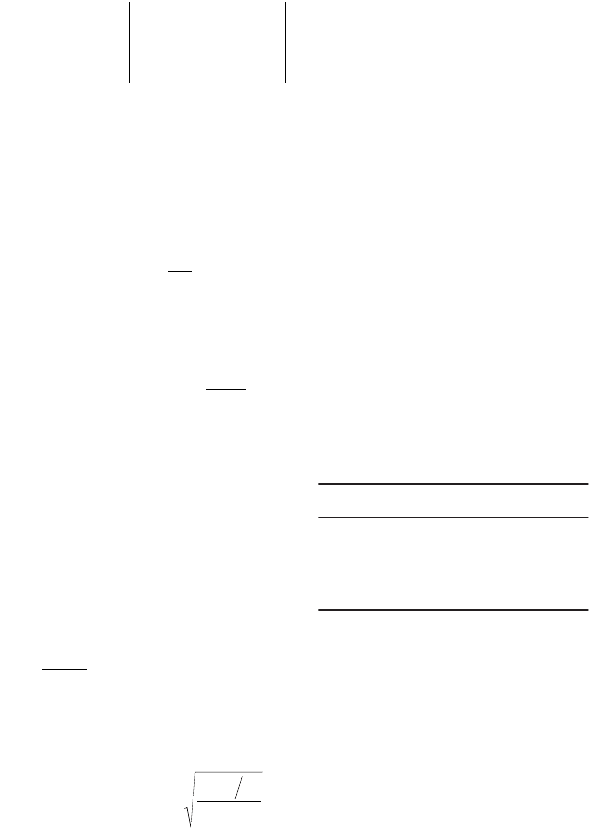
restrained column. Table 47.1 (AISC, 1993) summarizes the theoretical K factors for columns with
different boundary conditions. Also shown in the table are the recommended K factors for design
applications. The recommended values for design are equal to or higher than the theoretical values to
account for semirigid effects of the connections used in practice.
Stability of Beam-Columns
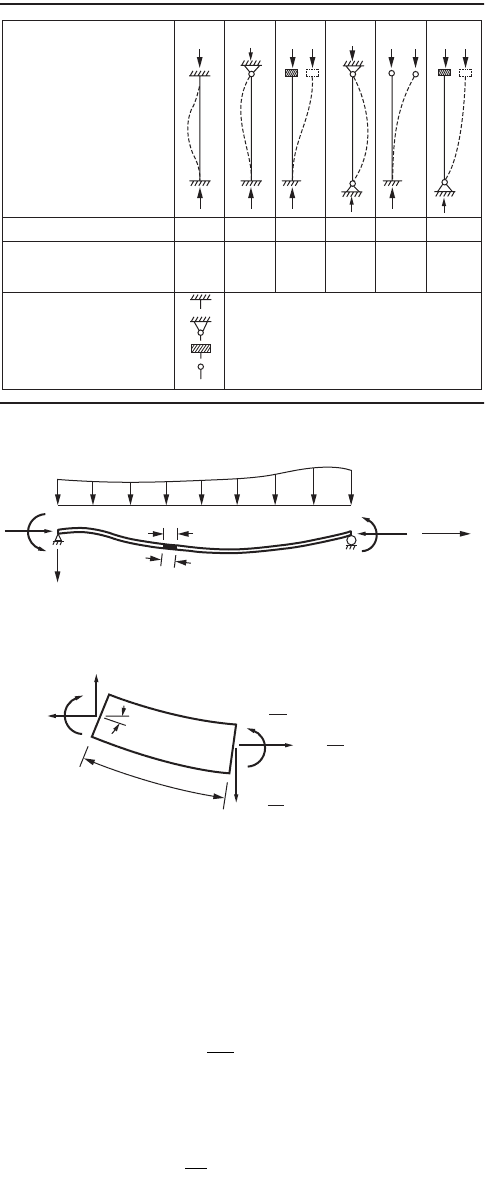
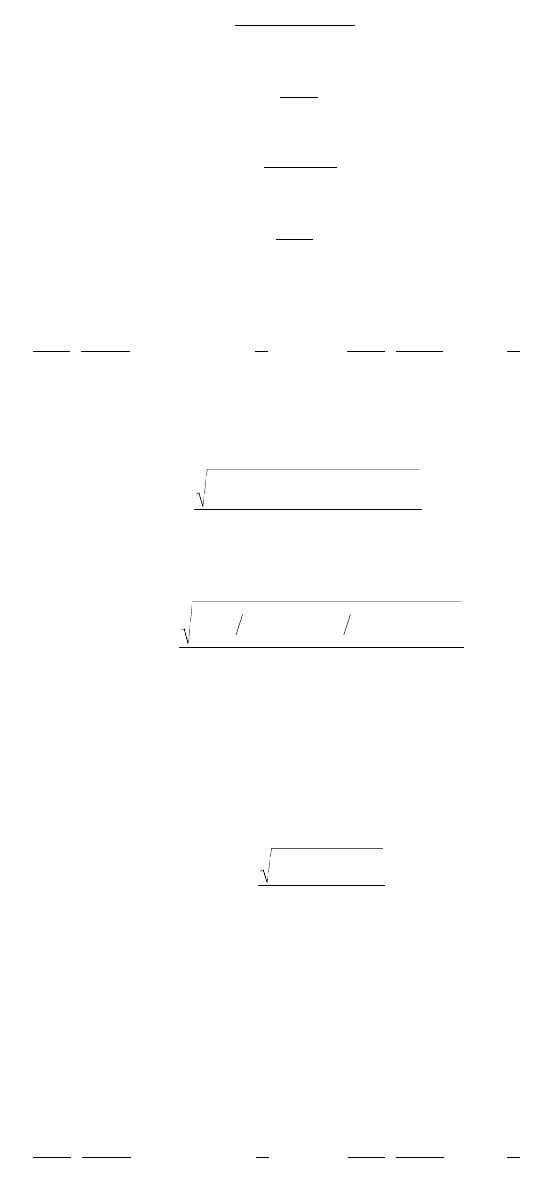
Figure 47.116a shows a beam-column subjected to an axial compressive force P at the ends, a lateral load
w along the entire length, and end moments M
A
and M
B
. The stability equation can be derived by
considering the equilibrium of an infinitesimal element of length ds, as shown in Fig. 47.116b. The cross
section forces S and H act in the vertical and horizontal directions.
det
sin cos
011
00
0
0k
kL kL
=
kkLcos = 0
kL
n
n==
p
2
135,,,...
P
EI
L
cr
=
p
2
2
4
TABLE 47.1 Boundary Conditions
for Various End Conditions
End Conditions Boundary Conditions
Pinned y = 0, y≤ = 0
Fixed y = 0, y≤ = 0
Guided y¢ = 0 y = 0
Free y≤ = 0, y + k
2
y¢ = 0
P
EI
KL
cr
=
()
p
2
2
K
EI L
P
cr
=
p
22
© 2003 by CRC Press LLC
47-142 The Civil Engineering Handbook, Second Edition
Considering the equilibrium of forces,
Horizontal equilibrium:
(47.279)
Ve rtical equilibrium:
(47.280)
TA B L E 47.2 Comparison of Theoretical and Design K Factors
FIGURE 47.116 Basic differential equation of a beam-column.
Buckled shape of
column is shown
by dashed line
Recommended design
value when ideal condi-
tions are approximated
Theoretical K value
End condition code
Rotation fixed and translation fixed
Rotation free and translation fixed
Rotation fixed and translation free
Rotation free and translation free
(c)(b)(a) (e)(d) (f)
0.5 0.7 1.0 1.0 2.0 2.0
0.65 0.80 1.2 1.0 2.10 2.0
dM
ds
M +
ds
dS
ds
S +
ds
dH
ds
H +
ds
ds
(b)
M
H
S
q
(a)
B
P
A
y
dx
w
M
A
M
B
P
x
ds
H
dH
ds
ds H+-=0
S
dS
ds
ds S w ds+-+=0
© 2003 by CRC Press LLC

Theory and Analysis of Structures 47-143
Moment equilibrium:
(47.281)
Since (dS/ds)ds and (dH/ds)ds are negligibly small compared to S and H, the above equilibrium equations
can be reduced to
(47.282a)
(47.282b)
(47.282c)
For small deflections and neglecting shear deformations,
(47.283)
where y is the lateral displacement of the member. Using the above approximations, Eq. (47.282) can be
written as
(47.284)
Differentiating Eq. (47.284) and substituting Eq. (47.283a and b) into the resulting equation, we have
(47.285)
From elementary mechanics of materials, it can easily be shown that
(47.286)
Upon substitution of Eq. (47.286) into Eq. (47.285) and realizing that H = –P, we obtain
(47.287)
The general solution to this differential equation has the form
(47.288)
where k = and f(x) is a particular solution satisfying the differential equation. The constants A,
B, C, and D can be determined from the boundary conditions of the beam-column under investigation.
M
dM
ds
ds M S
dS
ds
S
ds
H
dH
ds
ds H
ds
+--++
Ê
Ë
Á
ˆ
¯
˜
Ê
Ë
Á
ˆ
¯
˜
++ +
Ê
Ë
Á
ˆ
¯
˜
Ê
Ë
Á
ˆ
¯
˜
=cos sinqq
22
0
dH
ds
= 0
dS
ds
w+=0
dM
ds
SH-+ =cos sinqq0
ds dx
dy
dx
@@@@, cos sinqqq1
dM
dx
SH
dy
dx
-+ =0
dM
dx
wH
dy
dx
2
2
2
2
0++ =
MEI
dy
dx
=-
2
2
EI
dy
dx
P
dy
dx
w
4
4
2
2
+=
yA kxB kxCxDfx=++++
()
sin cos
PEI
© 2003 by CRC Press LLC
47-144 The Civil Engineering Handbook, Second Edition
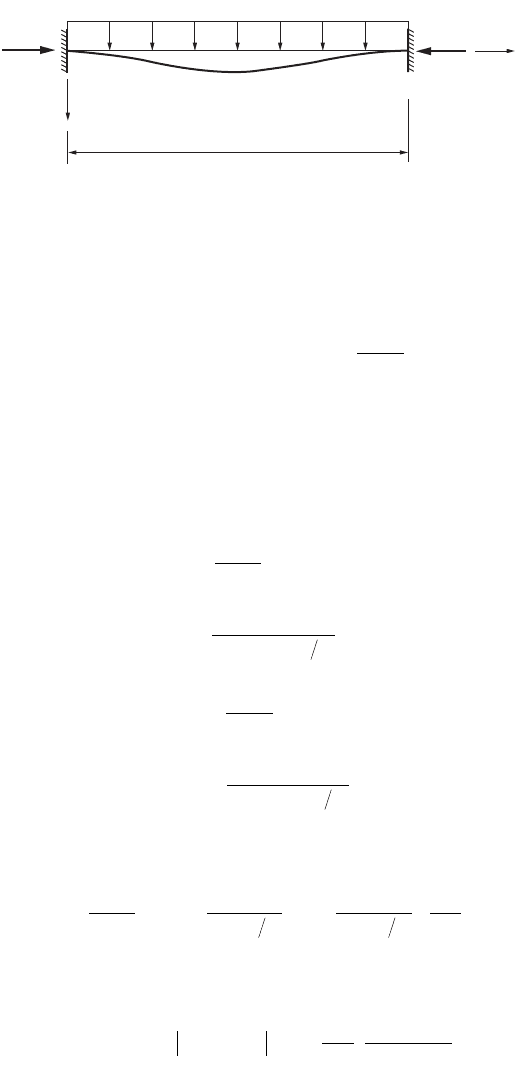
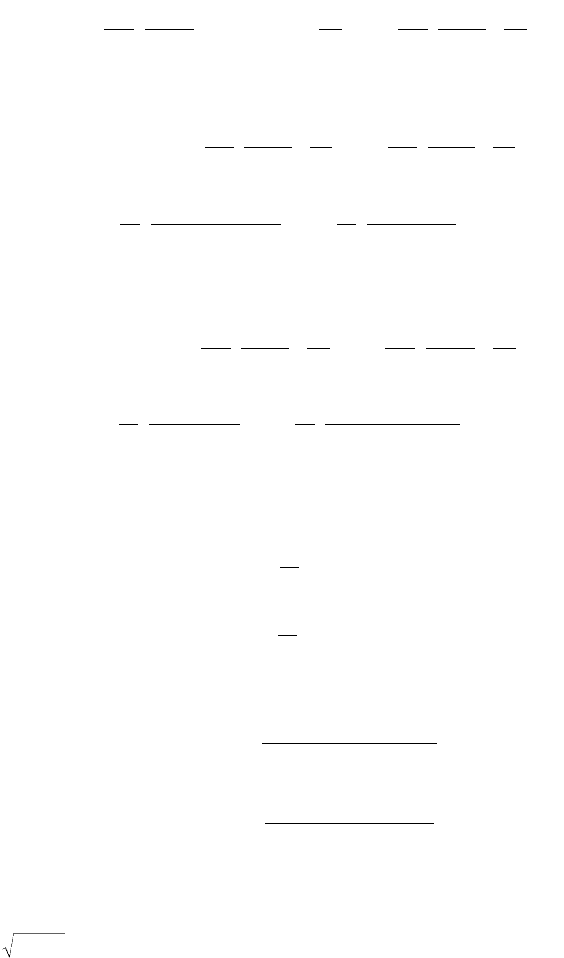
Beam-Column Subjected to Transverse Loading
Figure 47.117 shows a fixed-end beam-column with a uniformly distributed load w.
The general solution to Eq. (47.287) is
(47.289)
Using the boundary conditions
(47.290)
in which a prime denotes differentiation with respect to x, it can be shown that
(47.291a)
(47.291b)
(47.291c)
(47.291d)
Upon substitution of these constants into Eq. (47.289), the deflection function can be written as
(47.292)
The maximum moment for this beam-column occurs at the fixed ends and is equal to
(47.293)
where u = kL/2.
Since wL
2
/12 is the maximum first-order moment at the fixed ends, the term in the bracket represents
the theoretical moment amplification factor due to the P-d effect.
FIGURE 47.117 Beam-column subjects to uniform loading.
P
y
L
w
x
P
EI = constant
yA kxB xCx D
w
EIk
x=++++sin cos
2
2
2
yyyy
xxxLxL====
=
¢
==
¢
=
00
0 000
A
wL
EIk
=
2
3
B
wL
EIk kL
=
()
22
3
tan
C
wL
EIk
=-
2
2
D
wL
EIk kL
=-
()
22
3
tan
y
wL
EIk
kx
kx
kL
kx
kL
kx
L
=+
()
--
()
+
È
Î
Í
Í
˘
˚
˙
˙
22
1
2
3
2
sin
cos
tan tan
MEIy EIy
wL
uu
uu
x
xL
max
tan
tan
=-
¢¢
=-
¢¢
=-
-
()
È
Î
Í
Í
˘
˚
˙
˙
=
=
0
2
2
12
3
© 2003 by CRC Press LLC
Theory and Analysis of Structures 47-145
For beam-columns with other transverse loading and boundary conditions, a similar approach can
be followed to determine the moment amplification factor. Table 47.3 summarizes the expressions for
the theoretical and design moment amplification factors for some loading conditions (AISC, 1989).
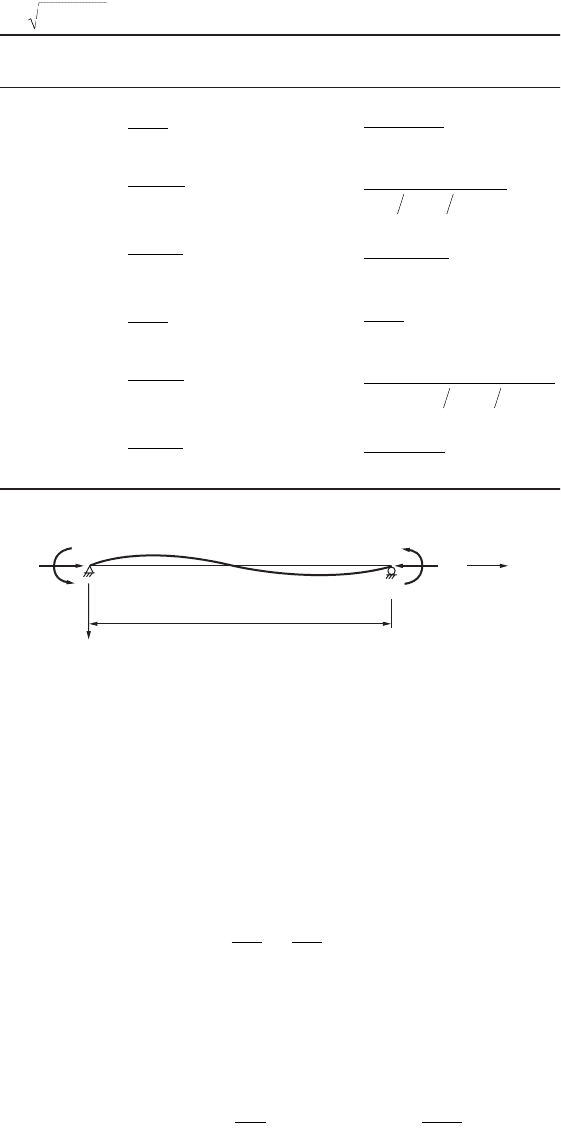
Beam-Column Subjected to End Moments
Consider the beam-column shown in Fig. 47.118. The member is subjected to an axial force of P and
end moments M
A
and M
B
. The differential equation for this beam-column can be obtained from Eq.
(47.287) by setting w = 0:
(47.294)
The general solution is
(47.295)
The constants A, B, C, and D are determined by enforcing the four boundary conditions:
(47.296)
TABLE 47.3 Theoretical and Design Moment Amplification Factor (u = kL/2 =
1/2
Boundary
Conditions P
cr
Location of M
max
Moment Amplification Factor
Hinged-hinged Midspan
Hinged-fixed End
Fixed-fixed End
Hinged-hinged Midspan
Hinged-fixed End
Fixed-fixed Midspan and end
FIGURE 47.118 Beam-column subjects to end moments.
(/)PL EI
2
p
2
2
EI
L
21
2
(sec )u
u
-
p
2
2
07
EI
L.
()
2
12 1 2
2
tan
tan
uu
uu u
-
()
-
()
p
2
2
05
EI
L.
()
3
2
tan
tan
uu
uu
-
()
p
2
2
EI
L
tanu
u
p
2
2
07
EI
L.
()
41
31212
2
uu
uuu u
-
()
-
()
cos
cos tan
p
2
2
05
EI
L.
()
21-
()
cos
sin
u
uu
P
x
M
B
EI = constant
M
A
y
L
EI
dy
dx
P
dy
dx
4
4
2
2
0+=
yA kxB kxCxD=+++sin cos
yy
M
EI
yy
M
EI
xx
A
xL xL
B
== ==
=
¢¢
==
¢¢
=
-
00
00,
© 2003 by CRC Press LLC
47-146 The Civil Engineering Handbook, Second Edition
to give
(47.297a)
(47.297b)
(47.297c)
(47.297d)
Substituting Eq. (47.297a to d) into the deflection function Eq. (47.295) and rearranging gives
(47.298)
The maximum moment can be obtained by first locating its position by setting dM/dx = 0 and substituting
the result into M = –EIy≤ to give
(47.299)
Assuming that M
B
is the larger of the two end moments, Eq. (47.299) can be expressed as
(47.300)
Since M
B
is the maximum first-order moment, the expression in brackets is therefore the theoretical
moment amplification factor. In Eq. (47.300), the ratio (M
A
/M
B
) is positive if the member is bent in
double (or reverse) curvature, and the ratio is negative if the member is bent in single curvature. A special
case arises when the end moments are equal and opposite (i.e., M
B
= –M
A
). By setting M
B
= –M
A
= M
0
in Eq. (47.300), we have
(47.301)
For this special case, the maximum moment always occurs at midspan.
Slope Deflection Equations
The slope deflection equations of a beam-column can be derived by considering the beam-column shown
in Fig. 47.118. The deflection function for this beam-column can be obtained from Eq. (47.298) in terms
of M
A
and M
B
as:
(47.302)
A
MkLM
EIk kL
AB
=
+cos
sin
2
B
M
EIk
A
=-
2
C
MM
EIk L
AB
=-
+
Ê
Ë
Á
ˆ
¯
˜
2
D
M
EIk
A
=
2
y
EIk
kL
kL
kx kx
x
L
M
EIk kL
kx
x
L
M
AB
=--+
È
Î
Í
˘
˚
˙
+-
È
Î
Í
˘
˚
˙
1
1
11
2
cos
sin
sin cos
sin
sin
M
MMMkLM
kL
AAB B
max
cos
sin
=
++
()
22
2
MM
MM MM kL
kL
B
AB AB
max
cos
sin
=
()
+
()
+
{}
È
Î
Í
Í
Í
Í
˘
˚
˙
˙
˙
˙
2
21
MM
kL
kL
max
cos
sin
=
-
()
{}
È
Î
Í
Í
Í
˘
˚
˙
˙
˙
0
21
y
EIk
kL
kL
kx kx
x
L
M
EIk kL
kx
x
L
M
AB
=--+
È
Î
Í
˘
˚
˙
+-
È
Î
Í
˘
˚
˙
1
1
11
22
cos
sin
sin cos
sin
sin
© 2003 by CRC Press LLC
Theory and Analysis of Structures 47-147
from which
(47.303)
The end rotations q
A
and q
B
can be obtained from Eq. (47.303) as
(47.304)
and
(47.305)
The moment rotation relationship can be obtained from Eqs. (47.304) and (47.305) by arranging M
A
and M
B
in terms of q
A
and q
B
as:
(47.306)
(47.307)
where
(47.308)
(47.309)
are referred to as the stability functions.
Equations (47.306) and (47.307) are the slope deflection equations for a beam-column that is not
subjected to transverse loading and relative joint translation. It should be noted that when P approaches
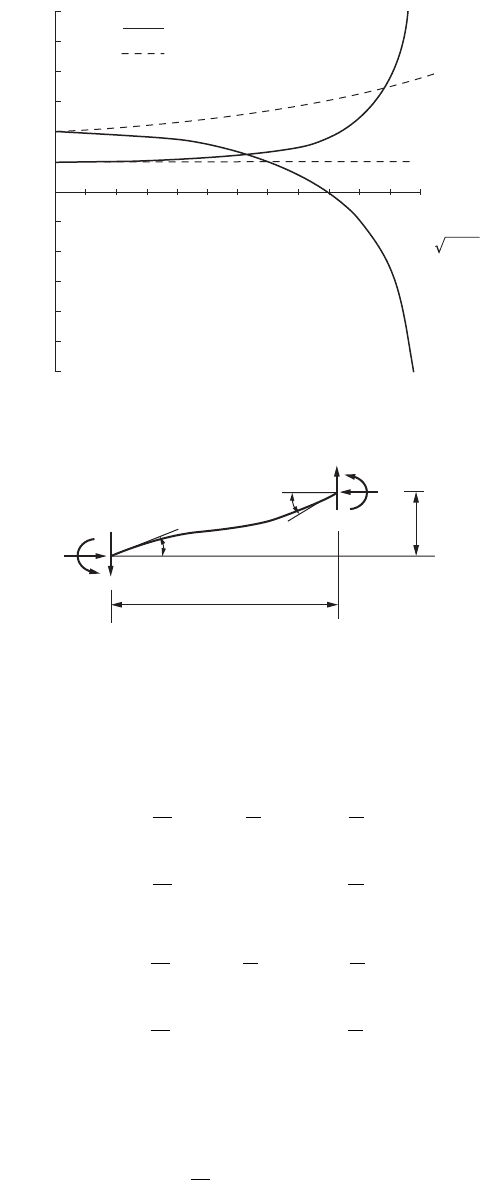
zero, kL = L approaches zero, and by using the L’Hospital’s rule, it can be shown that s
ij
= 4 and
s
ij
= 2. Values for s
ii
and s
ij
for various values of kL are plotted as shown in Fig. 47.119.
Equations (47.307) and (47.308) are valid if the following conditions are satisfied:
1. The beam is prismatic.
2. There is no relative joint displacement between the two ends of the member.
3. The member is continuous, i.e., there is no internal hinge or discontinuity in the member.
4. There is no in-span transverse loading on the member.
5. The axial force in the member is compressive.
If these conditions are not satisfied, some modifications to the slope deflection equations are necessary.
¢
=+-
È
Î
Í
˘
˚
˙
+-
È
Î
Í
˘
˚
˙
y
EIk
kL
kL
kx kx
kL
M
EIk
kx
kL kL
M
AB
1111
cos
sin
cos sin
cos
sin
q
AAB
AB
yx
EIk
kL
kL kL
M
EIk kL kL
M
L
EI
kL kL kL
kL kL
M
L
EI
kL kL
kL kL
M
=
¢
=
()
=-
È
Î
Í
˘
˚
˙
+-
È
Î
Í
˘
˚
˙
=
-
()
È
Î
Í
Í
˘
˚
˙
˙
+
-
()
È
Î
Í
Í
˘
˚
˙
˙
0
11111
22
cos
sin sin
cos sin
sin
sin
sin
q
BAB
AB
yx L
EIk kL kL
M
EIk
kL
kL kL
M
L
EI
kL kL
kL kL
M
L
EI
KL kL kL
kL kL
M
=
¢
=
()
=-
È
Î
Í
˘
˚
˙
+-
È
Î
Í
˘
˚
˙
=
-
()
È
Î
Í
Í
˘
˚
˙
˙
+
-
()
È
Î
Í
Í
˘
˚
˙
˙
11 1 1 1
22
sin
cos
sin
sin
sin
cos sin
sin
M
EI
L
ss
AiiAij B
=+
()
qq
M
EI
L
ss
BjiAjj B
=+
()
qq
ss
kL kL kL kL
kL kL kL
ii jj
==
-
()
--
sin cos
cos sin
2
22
ss
kL kL kL
kL kL kL
ij ji
==
()
-
--
2
22
sin
cos sin
(/ )PEI
© 2003 by CRC Press LLC
47-148 The Civil Engineering Handbook, Second Edition
Member Subjected to Side Sway
If there is a relative joint translation, D, between the member ends, as shown in Fig. 47.120, the slope
deflection equations are modified as
(47.310)
(47.311)
Member with a Hinge at One End
If a hinge is present at the B end of the member, the end moment there is zero, i.e.,
(47.312)
FIGURE 47.119 Plot of stability functions.
FIGURE 47.120 Beam-column subjects to end moments and side sway.
123456
12
8
4
2
0
−4
−8
−12
STABILITY FUNCTIONS
COMPRESSIVE AXIAL FORCE
TENSILE AXIAL FORCE
s
ij
s
i
s
ij
s
ii
kL(=π P/P
e
)
P
S
L
M
A
M
B
q
B
q
A
S
P
∆
M
EI
L
s
L
s
L
EI
L
ssss
L
AiiA ij B
ii A ij B ii ij
=-
Ê
Ë
Á
ˆ
¯
˜
+-
Ê
Ë
Á
ˆ
¯
˜
È
Î
Í
˘
˚
˙
=+-+
È
Î
Í
˘
˚
˙
qq
qq
DD
D
()
M
EI
L
s
L
s
L
EI
L
ss ss
L
BijA ii B
ij A ii B ii ij
=-
Ê
Ë
Á
ˆ
¯
˜
+-
Ê
Ë
Á
ˆ
¯
˜
È
Î
Í
˘
˚
˙
=+-+
()
È
Î
Í
˘
˚
˙
qq
qq
DD
D
M
EI
L
ss
BijAii B
=+
()
=qq0
© 2003 by CRC Press LLC
Theory and Analysis of Structures 47-149
from which
(47.313)
Upon substituting Eq. (47.313) into Eq. (47.310), we have
(47.314)
If the member is hinged at the A end rather than at the B end, Eq. (47.314) is still valid, provided that
the subscript A is changed to B.
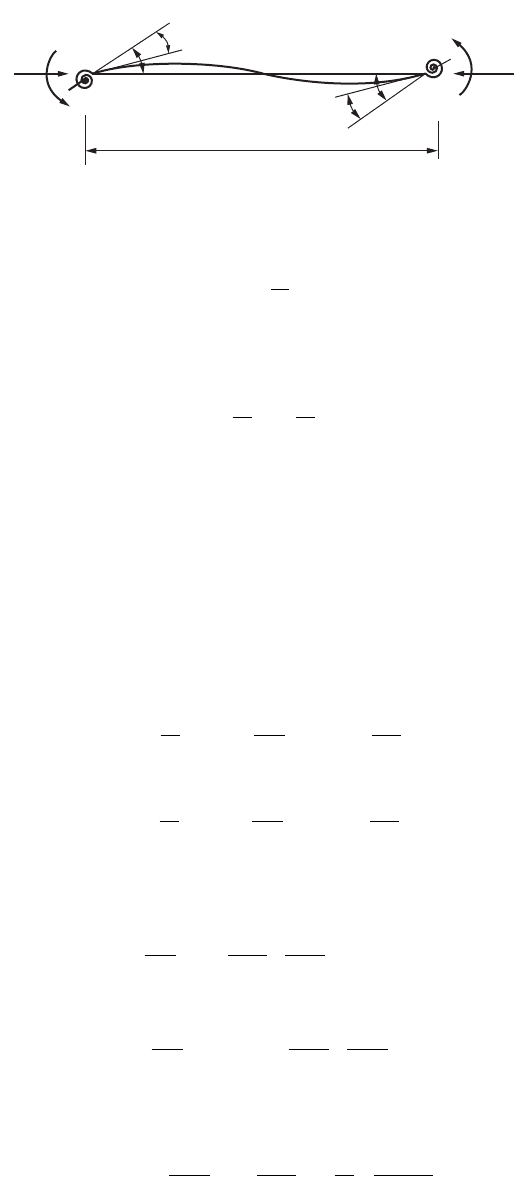
Member with End Restraints
If the member ends are connected by two linear elastic springs, as in Fig. 47.121, with spring constants
R
kA
and R
kB
at the A and B ends, respectively, the end rotations of the linear spring are M
A
/R
kA
and
M
B
/R
kB
. If we denote the total end rotations at joints A and B by q
A
and q
B
, respectively, then the member
end rotations, with respect to its chord, will be q
A
– M
A
/R
kA
and q
B
– M
B
/R
kB
. As a result, the slope
deflection equations are modified to
(47.315)
(47.316)
Solving Eqs. (47.315) and (47.316) simultaneously for M
A
and M
B
gives
(47.317)
(47.318)
where
(47.319)
FIGURE 47.121 Beam column with end springs.
P
A
M
A
q
rA
q
rB
q
B
q
A
M
B
L
EI = constant
B
P
qq
B
ij
ii
A
s
s
=-
M
EI
L
s
s
s
Aii
ij
ii
A
=-
Ê
Ë
Á
ˆ
¯
˜
2
q
M
EI
L
s
M
R
s
M
R
AiiA
A
kA
ij B
B
kB
=-
Ê
Ë
Á
ˆ
¯
˜
+-
Ê
Ë
Á
ˆ
¯
˜
È
Î
Í
Í
˘
˚
˙
˙
qq
M
EI
L
s
M
R
s
M
R
BijA
A
kA
jj B
B
kB
=-
Ê
Ë
Á
ˆ
¯
˜
+-
Ê
Ë
Á
ˆ
¯
˜
È
Î
Í
Í
˘
˚
˙
˙
qq
M
EI
LR
s
EIs
LR
EIs
LR
s
Aii
ii
kB
ij
kB
AijB
=+-
Ê
Ë
Á
ˆ
¯
˜
+
È
Î
Í
Í
˘
˚
˙
˙
*
2
2
qq
M
EI
LR
ss
EIs
LR
EIs
LR
BijAii
ii
kA
ij
kA
B
=++-
Ê
Ë
Á
ˆ
¯
˜
È
Î
Í
Í
˘
˚
˙
˙
*
qq
2
2
R
EIs
LR
EIs
LR
EI
L
s
RR
ii
kA
ii
kB
ij
kA kB
*
=+
Ê
Ë
Á
ˆ
¯
˜
+
Ê
Ë
Á
ˆ
¯
˜
-
Ê
Ë
Á
ˆ
¯
˜
11
2
2
© 2003 by CRC Press LLC
47-150 The Civil Engineering Handbook, Second Edition
In writing Eqs. (47.317) and (47.318), the equality s
jj
= s
ii
has been used. Note that as R
kA
and R
kB
approach infinity, Eqs. (47.317) and (47.318) reduce to Eqs. (47.306) and (47.307), respectively.
Member with Transverse Loading
For members subjected to transverse loading, the slope deflection Eqs. (47.306) and (47.307) can be
modified by adding an extra term for the fixed-end moment of the member.
(47.320)
(47.321)
Table 47.4 gives the expressions for the fixed-end moments of five commonly encountered cases of
transverse loading. See Chen and Lui (1987, 1991) for more details.
Member with Tensile Axial Force
For members subjected to tensile force, Eqs. (47.306) and (47.307) can be used, provided that the stability
functions are redefined as
(47.322)
(47.323)
Member Bent in Single Curvature with
B
= –
A
For the member bent in a single curvature in which q
B
= –q
A
, the slope deflection equations reduce to
(47.324)
(47.325)
Member Bent in Double Curvature with
B
=
A
For the member bent in a double curvature such that q
B
= q
A
, the slope deflection equations become
(47.326)
(47.327)
Second-Order Elastic Analysis
There are two methods to incorporate second-order effects, the stability function approach and the
geometric stiffness (or finite element) approach. The stability function approach is based on the governing
differential equations of the problem, as described above, whereas the stiffness approach is based on an
assumed cubic polynomial variation of the transverse displacement along the element length. Therefore,
the stability function approach is more exact in terms of representing the member stability behavior.
However, the geometric stiffness approach is easier to implement for matrix analysis.
M
EI
L
ss M
AiiAiiBFA
=+
()
+qq
M
EI
L
ss M
BijAjjBFB
=+
()
+qq
ss
kL kL kL kL
kL kL kL
ii jj
==
()
-
-+
2
22
cosh sinh
cosh sinh
ss
kL kL kL
kL kL kL
ij ji
==
-
()
-+
sinh
cosh sinh
2
22
M
EI
L
ss
AiiijA
=-
()
q
MM
BA
=-
M
EI
L
ss
AiiijA
=-
()
q
MM
BA
=
© 2003 by CRC Press LLC