Аблязов В.И. Конспект лекций. Автоматизированное управление процессами и системами
Подождите немного. Документ загружается.

91
SS (SB) – конфигурация вала;
250 (100, 200,…4096)– количество импульсов на оборот;
ABZ (A, AB, AZ) – число выходов;
C – наличие инверсных выходов
LED – наличие светодиодов.
Отечественные относительные датчики: ПДФ-3 выходной сигнал
состоит из двух сигналов А и В, с числом импульсов за оборот N=600; датчики
ДИФ-5 имеют модификации с числом импульсов N от 45 до 1800; ПДФ-8 и
ПДФ-9 имеют N от 125 до 2500 и, кроме того, включают в себя датчик
скорости (бесконтактный тахогенератор постоянного тока).
Абсолютные фотоимпульсные датчики бывают одно- и
многооборотными. Они представляют собой датчик, с которого снимается n-
разрядный двоичный код, показывающий положение датчика сразу после
включения питания. Отключение питания в абсолютных ФИД не приводит к
потере информации о положении объекта.
В однооборотном датчике кодирующий диск имеет несколько
концентрических дорожек, каждая из которых имеет сегментообразные
прозрачные и непрозрачные участки. Кольцо с минимальным радиусом имеет
два участка – старший разряд выходного двоичного числа, следующая дорожка
имеет четыре участка и т.д. На выходах однооборотного ФИД формируется
двоичный n-разрядный (по числу дорожек) код, соответствующий углу
поворота. Разрешающая способность (точность) однооборотных ФИД
определяется разрядностью n.
n
2
2
У современных ФИД n достигаtn 1…14. Соответственно, у 8-разрядного
ФИД точность измерения равна 2
/ 256, у 13-разрядных – 2
/ 8192 рад.
Многооборотные абсолютные датчики дополнительно к информации о
перемещении накапливают информацию о количестве оборотов. Для
накопления числа оборотов в составе ФИД имеется отдельный n
2
– разрядный
двоичный счетчик. Поэтому у абсолютных многооборотных датчиков
указывают разрешающую способность – число импульсов на оборот или просто
количество двоичных разрядов n
1
, например, n
1
= 10 (N = 1024) или 13
разрядов) и разрядность n
2
счетчика числа оборотов. При этом абсолютное
положение датчика (угла поворота) будет определяться ( n
1
+ n
2
) – разрядным
двоичным числом. При этом дискретность измерения (по углу поворота)
подобного датчика определяется ценой младшего разряда двоичного n
1
-
разрядного кода:
1
2
2
n
Информация о положении с абсолютных ФИД снимается в двоичном
коде или коде Грея.
92
Абсолютные датчики могут иметь режим предустановки – фиксирования
нулевого положения.
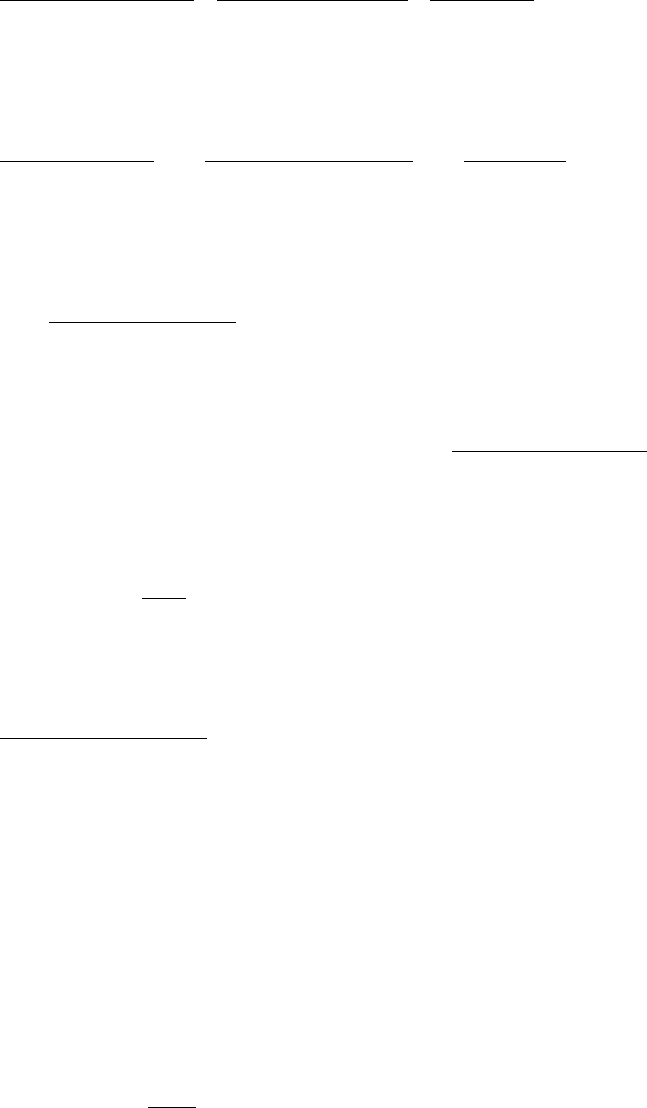
Примеры применения фотоимпульсных датчиков показаны на рисунках.
22. Применение частотных преобразователей
22.1. Назначение и структура частотных преобразователей
Еще 10 лет назад, в нашей стране, утверждение о том, что обычный
общепромышленный асинхронный двигатель может с успехом использоваться
в регулируемом по скорости электроприводе, вызывало удивление, или
недоверие, у многих главных и не очень главных конструкторов и инженеров.
Сегодня же, можно сказать, что страна вполне активно включилась в
общемировой бум по использованию р е г у л и р у е м о г о п о с к о р о с т и
а с и н х р о н н о г о э л е к т р о п р и в о д а во всех областях промышленности
и хозяйства.
Развитие асинхронного электропривода, и вытеснение им других типов
управляемых электроприводов, в первую очередь, связано с непревзойденными
эксплуатационными свойствами асинхронного электродвигателя. Недаром он
тратит более 50% вырабатываемой на Земле электроэнергии. Асинхронные
двигатели (АД) не имеет аналогов по простоте и надежности, являются самыми
массовыми, дешевыми и надежными. АД играют важную роль в инженерных
системах (отопление, вентиляция, водоснабжение, лифты), силовом
оборудовании (технологические линии, подъемные краны), станках, роботах.
Именно они могут работать там, где другие двигатели работать просто не
могут, в запыленной, взрывоопасной и агрессивной среде, в вакууме и под
водой.
Несмотря на это, до недавнего времени, в качестве регулируемых по
скорости электроприводов, там, где в производственных процессах необходимо
управление скоростью вращения, плавный пуск и торможение, в нашей стране,
в основном, использовались электроприводы постоянного тока. Системы
регулирования скорости двигателя постоянного тока достаточно просты, а
трудности, связанные с регулированием частоты вращения у АД, до недавнего
времени ограничивали их применение.
В настоящее время электродвигатели постоянного тока и построенные на
его основе системы управлемого электропривода во всём мире уже практически
Нож
Нож
ФИД
Стол
ФИД
93
полностью заменены на современные устройства частотного регулирования
переменного тока.
Частотно-регулируемый привод необходим для решения типичных задач
повышения эффективности практически любого производства. При этом
значительная экономия электроэнергии достигается при управлении каким-
либо технологическим параметром, например:
- Регулирование производительности транспортёров, конвейеров,
подъёмников, кранов и др. подъёмно-транспортных механизмов.
- Регулирование расхода или давления жидкости в трубопроводе,
расхода, давления или разрежения газа (насосы, вентиляторы или дымососы)
Слабым местом электропривода постоянного тока является двигатель. Он
дорог а, коллекторно-щеточный механизм является его основной проблемой.
При работе, коллектор подгорает, двигатель требует постоянного
обслуживания, не может работать в запыленной и агрессивной среде.
При питании неподвижной обмотки статора синхронного и асинхронного
электродвигателя трехфазным напряжением с частотой f создается
вращающееся магнитное поле с угловой частотой вращения:
n
p
f
/
2
1
где f – частота питающей сети, p
n
– число пар полюсов.
В синхронном электродвигателе угловая частота вращения ротора
2
в
установившемся режиме равна частоте вращения магнитного поля статора
1
.
В асинхронном электродвигателе частота вращения ротора
2
в
установившемся режиме отличается от частоты вращения
1
на величину
скольжения s.
Переход от угловой скорости вращения поля
1
, измеряемой в радианах,
к частоте вращения n
1
, выраженной в оборотах в минуту, осуществляется по
формуле: n
1
= 60
1
/ 2
. . Откуда :
n
p
f
n
/
60
1
Таким образом, частота вращения ротора синхронного и асинхронного
двигателей зависит от частоты напряжения питания.
На этой зависимости и основан метод частотного регулирования.
Изменяя с помощью преобразователя частоту f на входе двигателя, мы
регулируем частоту вращения ротора.
Если через n
1
обозначить скорость вращения вращающегося магнитного
поля статора (синхронная скорость), а через n
2
— скорость вращения ротора
двигателя, то скорость его относительно вращающегося поля статора будет
равна разности:
n
1
— n
2
.
Число, показывающее, во сколько раз относительная скорость ротора
меньше скорости вращающегося магнитного поля статора, называется
скольжением двигателя и обозначается буквой S.
Таким образом, скольжение будет равно:
94
S = ( n
1
— n
2
.) / n
1
,
откуда
n
2
. = n
1
(1 — S )
Скольжение асинхронного двигателя в зависимости от нагрузки меняется
незначительно.
Чем больше мощность двигателя, тем меньше его скольжение.
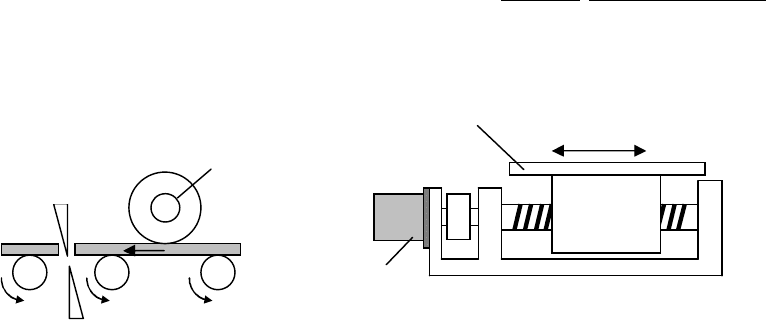
Пример. Определить скольжение в процентах для шестиполюсного
асинхронного двигателя, если ротор его делает 960 об/мин.
Таким образом, асинхронная машина, работая в режиме двигателя,
изменяет скорость вращения от n = 0 (момент пуска) до n n1 (холостой ход)
и, соответственно, скольжение от S= + 1 до S=0
При номинальной нагрузке двигателя малой мощности их скольжение
бывает равно 3—6°/», а двигателей большой мощности— 1—3°/о.
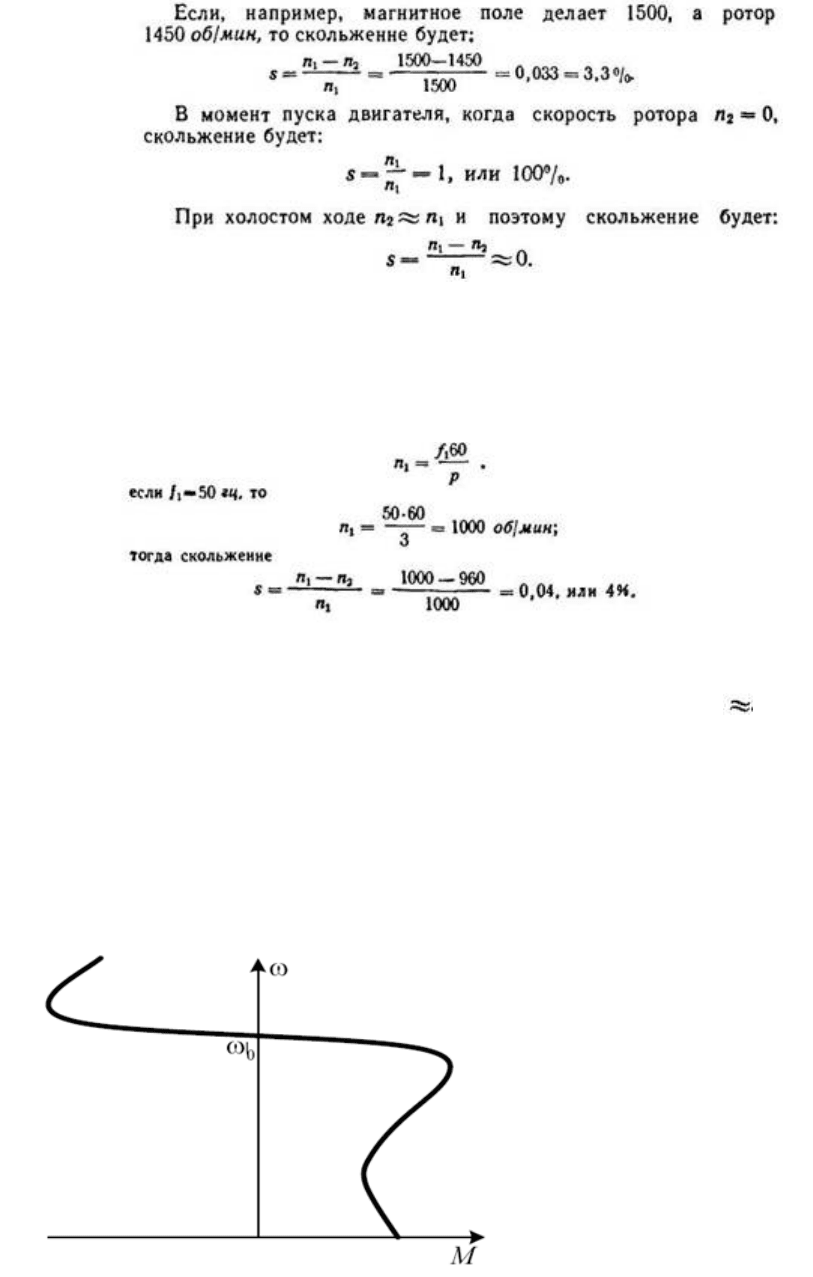
Вращающееся магнитное поле пересекает витки обмоток ротора. Если
скорость вращения ротора отличается от скорости вращения поля, то в
роторной обмотке начинает индуцироваться ток, который, взаимодействуя с
полем статора, создает момент. В
результате двигатель обладает
механической характеристикой,
изображенной на рисунке.
Как видно из
характеристики, скорость на
рабочем участке несильно
отличается от скорости холостого
хода, и становится ясно, что
эффективно регулировать скорость
вращения двигателя можно,
изменяя частоту вращения поля

95
статора или частоту питающей сети.
Этот основной закон управления асинхронным двигателем в частотном
режиме был сформулирован еще в тридцатых годах академиком Костенко. Этот
способ является основным и наиболее рациональным способом регулирования
скорости асинхронного двигателя. Но реализовать данный закон удалось
гораздо позже, когда появились мощные тиристоры.
С развитием микропроцессоров и появлением для целей широтно-
импульсной модуляции (ШИМ) биполярных транзисторов с изолированным
затвором IGBT (Insulated Gate Bipolar Transistor), значительное число ведущих
электротехнических фирм OMRON, Siemens, General Electric, Schneider Electric,
Danfoss и др., - освоили выпуск нового поколения промышленных частотных
преобразователей. В настоящее время, широкий поток зарубежных
преобразователей потихоньку заливает необъятные просторы нашей Родины.
Анализ продукции ведущих мировых производителей привода позволяет
отметить неуклонное снижение доли привода с двигателями постоянного тока и
увеличение доли систем привода с двигателями переменного тока.
Ч а с т о т н ы й п р е о б р а з о в а т е л ь - это электронные
устройства для плавного бесступенчатого регулирования скорости. Он
преобразует 3-фазное (иногда, при мощности до 1,5кВт, однофазное) входное
напряжение 220/380В частотой 50Гц, в выходное импульсное напряжение,
которое формирует в обмотках двигателя синусоидальный ток частотой от 0 до
50Гц и выше (до 400Гц). В простейшем случае частотного регулирования
управление скоростью вращения вала осуществляется с помощью изменения
частоты и амплитуды трехфазного напряжения подаваемого на двигатель.
Малые габариты, хорошие характеристики, надежность и невысокая
стоимость предопределили перспективность и экономическую обоснованность
применения частотных преобразователей с асинхронными двигателями, как для
замены регулируемого привода постоянного тока, так и для замены
нерегулируемого привода переменного тока в целом ряде применений.
Большинство современных преобразователей частоты построено по схеме
двойного преобразования. ЧП состоит из следующих основных частей:
звена постоянного тока
силового трехфазного импульсного инвертора
системы управления .
22.2. Принцип работы частотного преобразователя
Переменное напряжение промышленной сети выпрямляется блоком
выпрямительных диодов и фильтруется батареей конденсаторов большой
емкости для минимизации пульсаций полученного постоянного напряжения.
Это напряжение подается на мостовую схему, включающую шесть
управляемых IGBT транзисторов с диодами включенными параллельно для
защиты транзисторов от пробоя напряжением обратной полярности,
возникающем при работе с обмотками двигателя.
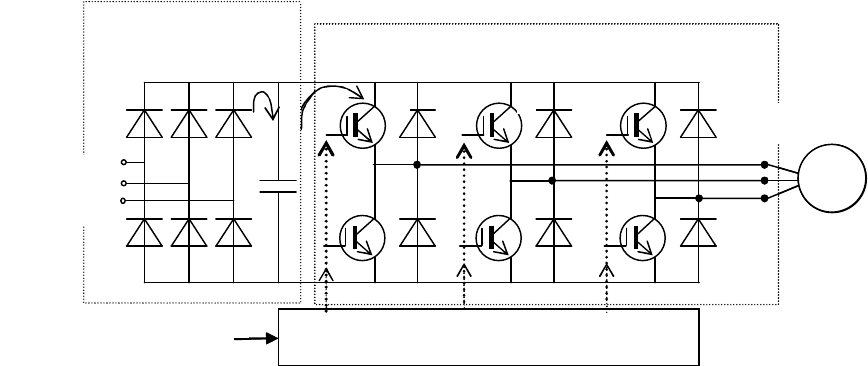
96
Используя специальный алгоритм управления - открывая и закрывая
перекрестные пары транзисторов, устройство управления подсоединяет через
соответствующий ключ к положительному и отрицательному полюсу звена
постоянного тока каждую обмотку двигателя. Формируя таким образом
направление и широтно-импульсную модуляцию (ШИМ) напряжения в фазах
двигателя, создаётся необходимая величина и форма тока в фазных обмотках
при разных частотах вращения поля.
Управление шестью ключами инвертора на заданной несущей частоте
(обычно 10-20 кГц) осуществляется таким образом, что в средних точках
каждой стойки инвертора формируются волны синусоидального выходного
напряжения U1, U2, U3, сдвинутые друг относительно друга на 120
электрических градусов. При этом верхний и нижний ключи всегда
коммутируются в противофазе. Так для изображенных на рисунке
последовательность управления ключами может быть следующая:
1-6, 6-3, 3-2, 2-5, 5-4, 4-1,…
При этом частота F трехфазного напряжения, формируемого инверторосм
и подаваемая на обмотки двигателя, задается подаваемым в устройство
управляющим сигналом U
упр
.
Каким же образом с помощью ключевых схем можно осуществить
преобразование постоянного напряжение в синусоидальное напряжение
переменной частоты и амплитуды?
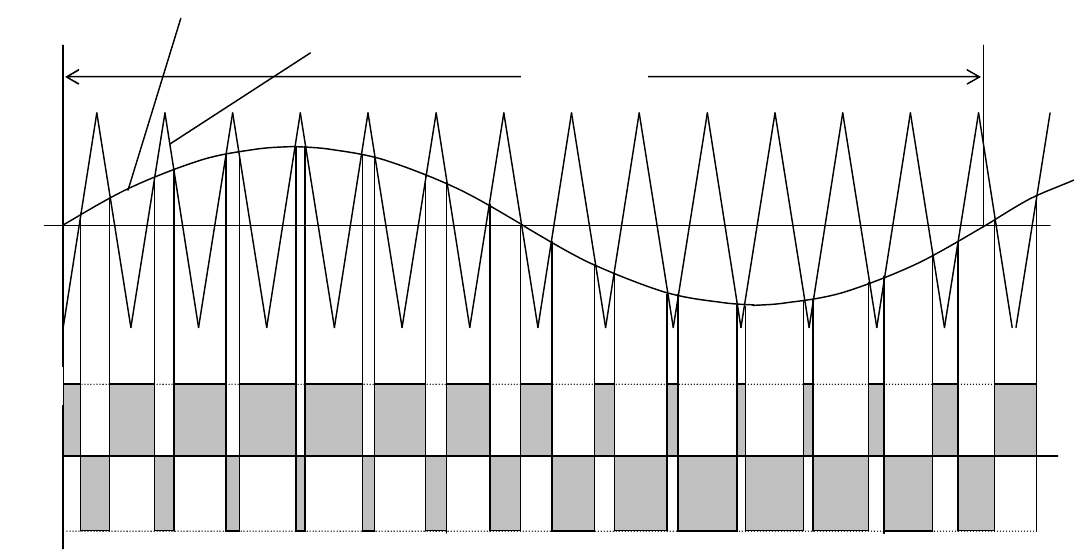
Принцип ШИМ. Рассмотрим формирование одной фазы напряжения. В
устройстве управления формируется вспомогательный гармонический
(синусоидальный) сигнал Uгарм ,частота которого пропорциональна величине
входного управляющего сигнала Uупр . Этот гармонический сигнал в блоке
ШИМ сравнивается с пилообразным опорным напряжением Uоп .
Период опорного сигнала называется периодом модуляции. Внутри
каждого периода модуляции вывод обмотки подключается, по очереди, к
положительному и отрицательному полюсам звена постоянного тока. Если
U
оп
<U
гарм
, тогда открывается одна группа ключей , если U
оп
>U
гарм
, тогда -
Трехфазный импульсный инвертор
380/220
50Гц
+
–
М
Устройство управления
U
упр
V/F
Трехфазный импульсный инвертор
Звено
постоянного
тока
380/220
50Гц
+
–
АД
Устройство управления
U
упр
V/F
2
3
4
5
6
1
97
группа ключей в противофазе. Длительность этих состояний, внутри периода
ШИМ, модулируется по синусоидальному закону. Очевидно, что основная
гармоника выходного напряжения повторяет по частоте и амплитуде сигнал
U
гарм
При изменении амплитуды U
гарм
меняется соотношение длительностей
положительных и отрицательных импульсов напряжения на выходе и,
следовательно, амплитуда основной гармоники выходного напряжения. . При
высоких (обычно 2…15 кГц), тактовых частотах ШИМ, в обмотках двигателя,
вследствие их фильтрующих свойств, протекают синусоидальные токи.
Подобное импульсное управление позволяет получить очень высокий
КПД преобразователя и практически эквивалентно, аналоговому управлению с
помощью частоты и амплитуды напряжения.
В схему инвертора иногда включают цепь "слива" энергии - транзистор с
резистором большой мощности рассеивания (на рисунке не показан). Эту схему
используют в режиме электрического торможения, когда частотный
преобразователь уменьшает выходную частоту до требуемого значения, и часть
энергии возвращается в первичную сеть. При большом моменте либо при
быстром останове чтобы гасить генерируемое двигателем напряжение и
обезопасить конденсаторы от перезарядки и выхода из строя часть этой энергии
гасится на внешнем резисторе торможения.
ПЧ в своем составе имеют панель с дисплеем и необходимыми органами
управления для проведения пуско-наладки и управления частотным
преобразователем, контроля и диагностики. Иногда, для исключения
несанкционированного доступа, пульт с клавишной панелью управления и ЖК
индикатором делается съемным. Современные съемные пульты имеют в своем
U
вых
t
t
Uоп
2
/
у п р
U
гарм
98
составе память и позволяют запомнить выполненную настройку параметров и
перенести её, при необходимости, на другой преобразователь.
Дисплей (7-сегментный индикаторный либо жидкокристаллический) в
процессе функционирования используется для отображения параметров.
Помимо индикации параметров (состояния «работа», «авария», «режим
торможения», значение тока нагрузки, обороты двигателя, частота и
напряжение питающей сети и др.) некоторые преобразователи имеют
возможность формировать сигналы управления посредством тех же аналоговых
и дискретных выходов, тем самым реализовывать более сложные системы
управления.
Практически все фирмы-производители выпускают широкую
номенклатуру частотных преобразователей, различающихся функциональными
возможностями, мощностью (от сотен ватт до десятков киловатт) и законом
управления (скалярное и векторное).
22.3. Скалярное и векторное регулирование
В простейших случаях регулирование частоты и напряжения,
подводимого к статору АД, происходит в соответствии со скалярным методом
управления. Скалярное управление достаточно для большинства практических
случаев применения частотно регулируемого электропривода, где требуется
относительно небольшой диапазон регулирования по скорости, с диапазоном
регулирования частоты вращения до 1:40 (насосы, вентиляторы, конвейеры,
компрессоры и т.д.).
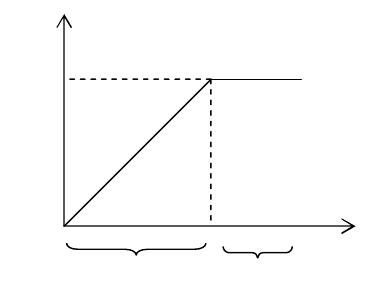
При скалярном управлении поддерживается постоянным отношение
максимального момента двигателя к моменту сопротивления на валу. Т.е. при
изменении частоты амплитуда напряжения изменяется таким образом, что
отношение максимального момента двигателя к текущему моменту нагрузки
остается неизменным: U/F=cons. (см. рис). Такое частотное управление при
регулировании частоты вниз от
номинальной именуют также U/F
характеристикой, или просто V/F.
Это отношение называется
перегрузочной способностью двигателя.
При постоянстве перегрузочной
способности номинальные коэффициенты
мощности и к.п.д. двигателя на всем
диапазоне регулирования частоты
вращения практически не меняются. При
скалярном управлении для поддержания требуемых рабочих характеристик
двигателя необходимо с изменением частоты одновременно соответственно
изменять и амплитуду напряжения.
При регулировании частоты вверх от номинальной имеет место режим
снижения магнитного потока двигателя, поскольку амплитуда напряжения
остается неизменной на уровне ее номинального значения. При увеличении
U
F
F
ном
U
ном
M=const
P=const

99
частоты больше номинальной следует учитывать возможность самих
двигателей работать при повышенных скоростях (нагрев, трение,
конструктивные особенности, уменьшение момента и т.д.).
Переход к широкодиапазонным (до 1:10000), быстродействующим
приводам станков, роботов и транспортных средств, требует применения более
сложных структур векторного управления. Оно реализовано в наиболее
совершенных преобразователях.
При в е к т о р н о м у п р а в л е н и и , в отличие от частотного,
управление скоростью вращения двигателя осуществляется с помощью
р е г у л и р о в а н и я а м п л и т у д ы и ф а з ы в е к т о р а п о л я
двигателя. Такое управление является наиболее точным в динамике и статике, а
также более экономичным.
Векторное управление позволяет существенно увеличить диапазон
управления, точность регулирования, повысить быстродействие
электропривода. Этот метод обеспечивает непосредственное управление
вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает
возбуждающее магнитное поле. При непосредственном управлении моментом
необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор
тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного
потока статора относительно вращающегося ротора требуется знать точное
положение ротора в любой момент времени. Задача решается либо с помощью
выносного датчика положения ротора, либо определением положения ротора
путем вычислений по другим параметрам двигателя. В качестве этих
параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с
векторным управлением без датчика обратной связи скорости, однако
векторное управление при этом требует большого объема и высокой скорости
вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых,
близких к нулевым скоростям вращения работа частотно регулируемого
электропривода без обратной связи по скорости невозможна.
Векторное управление позволяет работать с полным моментом в области
почти нулевых скоростей, точно поддерживать скорость при переменной
нагрузке без датчика обратной связи, точно контролировать момент на валу
двигателя. Привода с асинхронными двигателями, питающимися от векторных
частотных преобразователей, могут заменить регулируемые привода
постоянного тока.
Векторное управление с датчиком обратной связи скорости обеспечивает
диапазон регулирования до 1:1000 и выше, точность регулирования по
скорости – сотые доли процента, точность по моменту – единицы процентов
100
Можно выделить следующие преимущества векторного регулирования
по сравнению с обычным частотным:
точное поддержание скорости с компенсацией скольжения, даже без
обратной связи по скорости;
большой диапазон регулирования;
в области малых частот двигатель работает плавно и сохраняет момент
вплоть до нулевой скорости;
быстрая реакция на скачки нагрузки, вследствие высокой динамики
регулирования, практически не происходит скачков скорости;
оптимизация КПД двигателя на низких частотах;
за счет регулирования тока намагничивания, осуществляется снижение
потерь и оптимизация режима работы двигателя.
22.4. Функциональные возможности преобразователей
Н а с т р о й к а режима р а з г о н а - т о р м о ж е н и я . Разгон и торможение
двигателя осуществляется плавно (по линейному закону), время разгона о
торможения можно настраивать, например, в пределах о 0,1 секунды до 30
минут. Возможен плавный реверс двигателя.
К о м п е н с а ц и и и н е р ц и о н н о й н а г р у з к и . При разгоне происходит
автоматическое увеличение момента для компенсации инерционной нагрузки.
Пусковой момент может достигать 150% от номинального.
З а щ и т а п р е о б р а з о в а т е л я и д в и г а т е л я . Частотные
преобразователи могут обеспечивать защиту преобразователя и двигателя от
перегрузок по току, от замыкания и обрыва выходных фаз; от замыкания
выходных фаз на землю; защиту двигателя от пере- и от недонапряжения,
защиту от перегрева.
К о н т р о л ь п а р а м е т р о в . Преобразователь позволяет отслеживать и
отображать на цифровом пульте основные параметры системы: заданную
скорость, выходную частоту, ток и напряжение двигателя, выходную мощность
и момент, состояние дискретных входов, общее время работы преобразователя
и др.
В ы б о р х а р а к т е р и с т и к и у п р а в л е н и я . В соответствии с
характером нагрузки можно выбрать подходящую U/F характеристику или
создать собственную.
П И Д - р е г у л я т о р . Преобразователи частоты, как скалярные и, тем
более, векторные, могут иметь встроенный П И Д - р е г у л я т о р
(Пропорциональная-Интегральная-Дифференциальная составляющая). Для
работы в этом режиме необходим аналоговый датчик обратной связи (0-10В
или 4-20мA), сигнал с которого, характеризующий определенный параметр
системы (расход, скорость, уровень, давление, температура и т.д.), подается на
специальный вход преобразователя. Преобразователь изменяет скорость
вращения двигателя таким образом, чтобы поддерживать на заданном уровне
контролируемый параметр. Наличие встроенного ПИД- регулятора позволяет
упростить систему управления и не использовать внешних регуляторов.