Аблязов В.И. Конспект лекций. Автоматизированное управление процессами и системами
Подождите немного. Документ загружается.


81
где: Rg
X
– значение кода выходного регистра по соответствующей
координате;
М Р
– цена е диницы младшег о разря да кода
выходного регистра, приве денная к у глу поворота двигателя,
которая определяется следующим образом:
n
X
MP
Rg
2
22
max
рад, (2).
Цена е ди ницы старше го разряда кода выходного регис тра,
пр иве денная к углу поворота двигател я, будет составлять половину
полного оборота:
1
2
n
MPCP
рад (3).
Поскольку линейные перемещения S
и с т
связаны с угловыми
соотношением: S
и с т
= (
и с т
i
Дв.-ХВ
.)
Т
ХВ
/ 2
(4).
где: Т
ХВ
– шаг ходового винта в мм;
i
Дв.-ХВ
–передаточное число редуктора (от двигателя до ходового
винта),
и с т
– угол поворота двигателя (истинный).
Цена единицы младшего
S - М Р
и с таршег о
S - С Р
разряда
кода выходного регистра, приведе нная к линейн ом у
переме щению исполнительного органа соответственно составит:
ХВХВДв
МР
МРS
Тi
2
ММ (5).
ХВХВДв
CР
CРS
Тi
2
ММ (6).
В следящих системах истинное положение угла поворота двигателя
и с т
отслеживается ДОС, сигнал с которого сравнивается (иногда самим ДОС) с
сигналом задания координатного перемещения U
X - з а д
= E s i n (
о п
t
з а д
) ,
формируемого функциональным цифро-аналоговым преобразователем
(ФЦАП). В фазовых системах величина перемещения определяется фазовым
сдвигом
зад
относительно опорного сигнала E Sin
о п
t .. При применении
периодических датчиков сигнал задания, характеризующий величину
перемещений, также носит периодический характер. Причем код выходного
регистра управляющего устройства определяет фазовый сдвиг сигнала только в
пределах одного оборота (2) , а число полных оборотов подсчитывается в
дополнительном регистре, с числом разрядов n
д о п
.
Поэтому значение суммарного фазового сдвига за время полного
перемещения будет определяться суммой фазового сдвига
з а д
сигнала
задания и количеством полных оборотов (2), которые фиксируются кодом
дополнительного регистра. Значение фазового сдвига
з а д
формируется
82
ФЦАП на основе кода выходного (не дополнительного) регистра, определяется
следующим образом:
n
X
X
Xзад
Rg
Rg
Rg
2
2
max
2
рад (7).
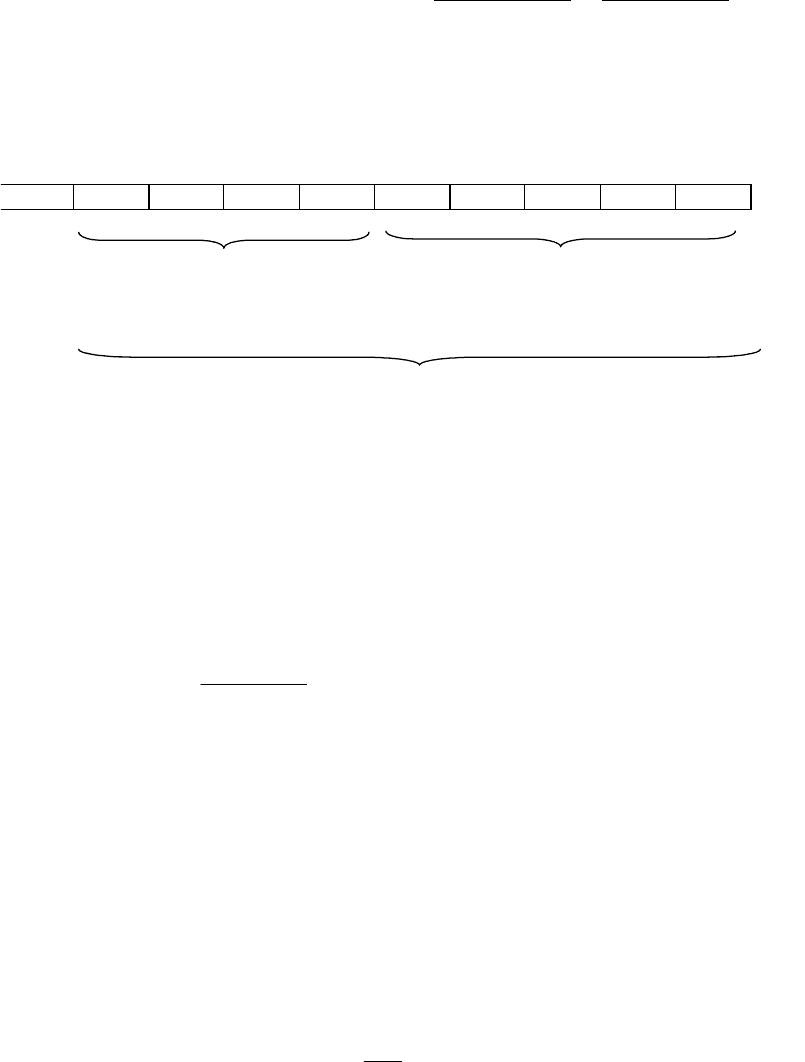
Текущие полномасштабные значения координат хранятся в
N=(n
в ы х
+n
д о п
) -разрядном регистре.
Количество дополнительных разрядов, зависит от максимально
возможного значения координат и цены младшего разряда дополнительного
регистра.
МРдоп
X
доп
n
max
2
log (8).
Обратные квадратные скобки означают, что выбирается наименьшее
целое значение не меньшее, чем значение в скобках. Естественно, что цена
младшего разряда дополнительного регистра
М Р д о п
будет в два раза больше
цены старшего разряда выходного регистра.
Минимальное значение опорной частоты определяется максимальной
скоростью перемещения. Скорость движения или, иными словами, величину
перемещения за единицу времени, определяет величина изменения кода за это
время. Для расчета минимальной частоты опорного сигнала в качестве такой
единицы времени возьмём период опорного сигнала
оп
оп
T
2
С (9).
За время Т
о п
поворот вала двигателя под действием сигнала
зад
не
должен превысить некоторую критическую величину
к р
, которой
соответствует линейное перемещение S
к р
. Чтобы обеспечить плавность
управления обычно
к р
/ 16 рад (10).
Уравнение (5) можно переписать в виде:
S
к р
= (
к р
i
Дв.-ХВ
.)
Т
ХВ
/ 2
. (11).
С другой стороны,
Знак n
в
+n
д
… n
в
+2 n
в
+1 n
в
n
в
-1 … 2 1
n
вых
-
разрядов выходного рег
и
стра,
(выдаваемый на привод)
n
доп
- разрядов дополнительного
регистра для представления старших
разрядов координат
n
абс
-
разрядов выходного и дополнительного регис
т
ров
для
представления максимальных значений координат
83
S
к р
= F
m a x
Т
о п
, (12)
где: F
m a x
– максимальная скорость (линейная) по координате.
Приравнивая (11) и (12) и подставляя значение Т
о п
в (9), получаем:
ХВДвXBкр
оп
iT
F
max
2
4
с
-1
(13)
Р.2.3. Фазовый сдвиг
зад
за время t определяется отклонением
угловой
частоты
з а д
сигнала задания от опорной
о п
.
При постоянной скорости по координате
tΩΨ
зад
.
(14)
Угловая скорость сигналов задания координатных перемещений,
например, для координаты Х, определяется:
XопXзад
(15)
Принимая время t равным периоду Т
оп
опорного сигнала из (14) можно
записать
ХВХВДвоп
опХзад
оп
Хзад
оп
Xзад
X
ТiТ
ТF
ТТ
2
. (16)
где:
Хзад
– в данном случае, фазовый сдвиг сигнала за время Т
о п
.
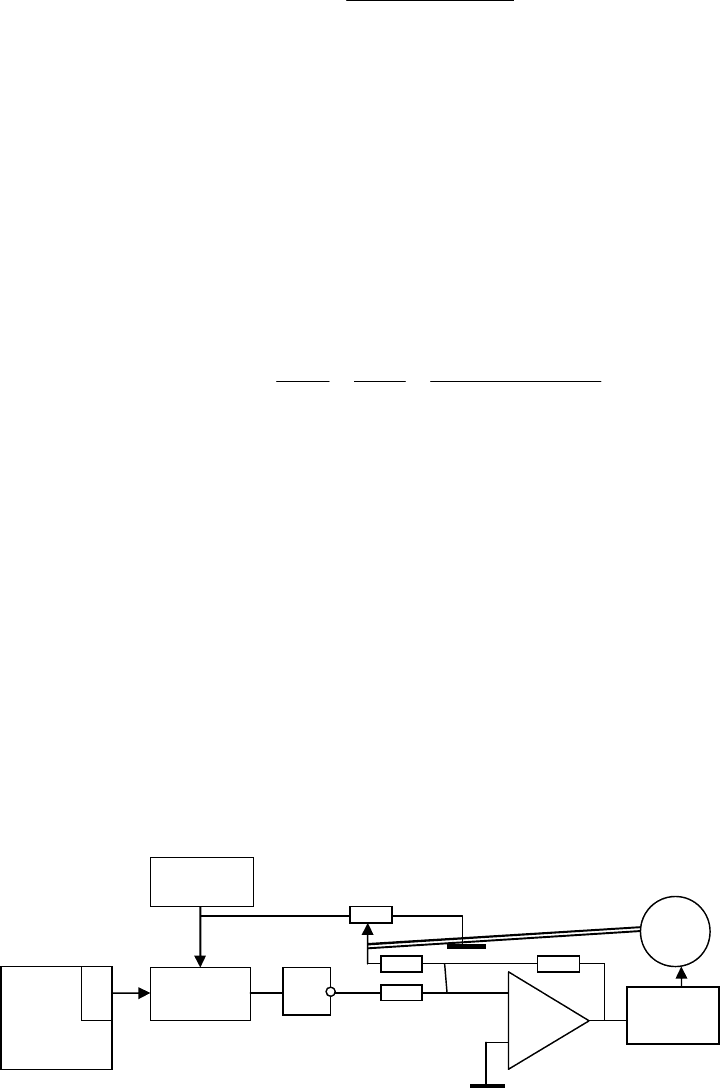
17. Следящий привод со сравнением аналоговых сигналов
Рассмотрим применение потенциометрических датчиков. Аналоговый
сигнал на выходе ЦАП представляет собой постоянное напряжение, величина
которого зависит от величины опорного сигнала и величины заданного
перемещения
зад
:
U
зад
= k
зад
(
зад
/
макс
)
U
оп
, где k
зад
– коэффициент, характеризующий
величину использования опорного сигнала. Этот сигнал после инвертора (со
знаком –) подается на вход суммирующего усилителя.
Сигнал U
ист
, снимаемый с потенциометрического датчика, подается на
второй вход суммирующего усилителя.
Операционный усилитель осуществляет суммирование поступающих
сигналов:
U= (U
зад
- U
ист
)=k
зад
(
зад
/
макс
)
U
оп
- k
ОС
(R
ист
/R
макс
)
U
оп
Поскольку положение движка соответствует положение двигателя:
R
ист
/R
макс
=
ист
/
макс
.
Если k
зад
= k
ОС
=k, тогда на выходе усилителя получаем:
R
ос
СЧПУ
Р
ЦАП
Д
ЭП
U
Зад
R
1
ИОН
–
+
R
2
U
ист
84
U
ЭП
= k
ус
k
ус
U
ЭП
= k
ус
U = k
ус
k
U
оп
(
зад
/
макс
-
ист
/
макс
) = К
(
зад
/
макс
-
ист
/
макс
).
Элемент сравнения и ФСУП здесь реализованы в линейном
суммирующем операционном усилителе.
ЦАП перемещений представляет собой типовой преобразователь кода в
постоянное напряжение. Источник опорных напряжений (ИОН) представляет
собой постоянное напряжение. В этой схеме колебания U
оп
не приводят к
потере точности слежения. Схема отличается простотой реализации и
используется в тех случаях, когда у нас осуществляются незначительные
перемещения по углу поворота и там, где точность требуется не более 0,1- 0,5
мм.
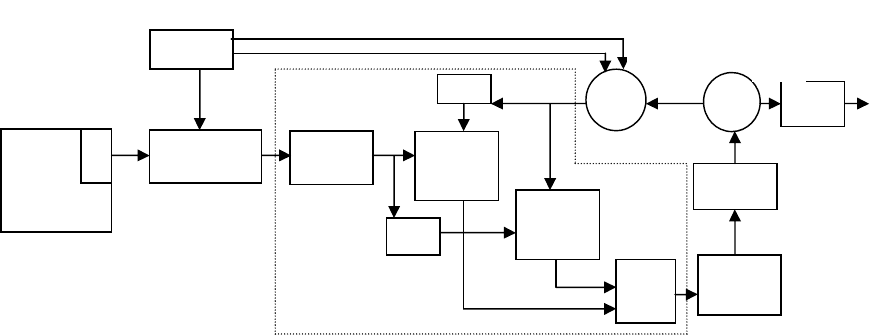
18. Следящий привода с работой ВТ в фазовом индикаторном режиме
Роль устройства, формирующего сигнал задания величины перемещений,
играет функциональный ЦАП перемещений (ФЦАПП). Датчик перемещений
формирует сигнал На вход ФЦАПП с СЧПУ поступает n-разрядный код
задания перемещений
зад
.В качестве опорного сигнала на ФЦАПП поступает
также сигнал U
оп
=Е
0
sin
t . ФЦАПП формирует сигнал U
Зад
=Е
0
sin(
t+
зад
), в
котором фазовый сдвиг
зад
пропорционален величине заданного углового
перемещения. Этот сигнал поступает на фазовый детектор (ФД). На другой
вход ФД с ВТ поступает сигнал, фазовый сдвиг которого пропорционален
истинному углу поворота ротора ВТ, а, следовательно, и вала двигателя.
ФД, сравнивая фазовые сдвиги синусоидальных сигналов с ФЦАПП и
сВТ формирует сигнал, величина напряжения которого пропорциональна
разности фазовых сдвигов сигналов U
Зад
и U
ВТ
, иными словами, величине
заданного и истинного положения вала двигателя, а знак этого напряжения
определяется знаком рассогласования.
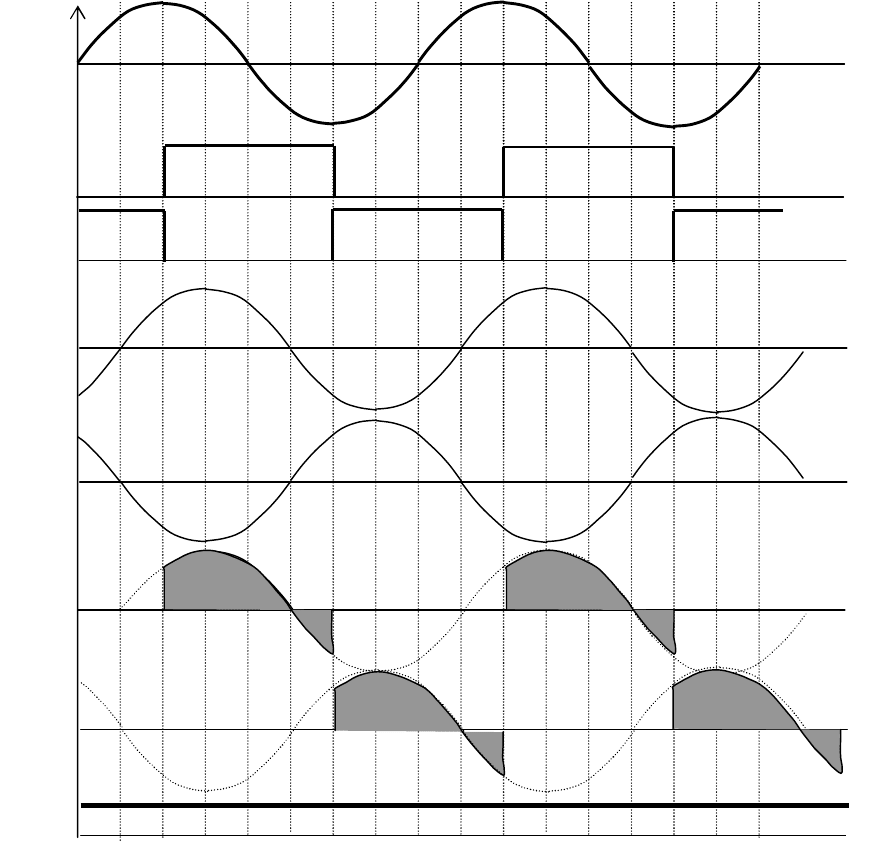
Так как ВТ работает в фазовом индикаторном режиме, то U
C1
=E
0
sin
t и
U
C2
=-E
0
cos
t. Временные графики поясняют принцип работы.
S
вых
U
оп
зад
СЧПУ
Р
ФЦАПП
Д
Т
ХВ
U
Зад
ФОС
ФПИ
Анал.
Ключ1
Анал.
Ключ2
НЕ
НЕ
ВТ
Ф
ФСУП
РЭП
ФД
вых
U
С1
U
С2
85
ФПИ – формирователь прямоугольных импульсов;
Ан. Кл. 1,2 – аналоговые ключи (управляющие входы, со стороны ФПИ,
разрешают или запрещают прохождение аналоговых сигналов);
Ф – интегрирующий фильтр (формирует среднее значение сигнала), его
роль может выполнять обычная емкость.
При изменении знака рассогласования cигнал после фильтра меняет знак
на противоположный. Если
зад
=
ист
, то полуволны будут симметричные.
ФПИ формирует прямоугольные импульсы в точках, когда первая
производная равна нулю (т. е. в точках максимального значения сигнала).
Если бы ВТ работал в фазовом разностном режиме, то:
U
С1
=E
0
sin(
t+
зад
) и U
С2
=-E
0
cos(
t+
зад
) .
Контрольные вопросы:
1. Чем определяется точность задания координат в следящем приводе
управления координатными перемещениями?
U
зад
U
ФП
U
ФПИ
U
ВТ
U
ВТ
U
АКл2
U
АКл1
U
Ф
t
86
2. Как часто должно происходить обновление значений текущих координат
(управляющих сигналов), выдаваемых на привод?
3. Чему равно предельно допустимое изменение угла поворота
двигателя
через один период обновления регистра координат?
4. Чем определяется направление поворота двигателя?
5. Где отражается в регистре формирования на привод кода текущих
координат число полных оборотов вала двигателя?
6. Чем определяется частота опорного сигнала
о п
., в следящей системе с
использованием СКВТ в качестве датчиков угловых перемещений?
7. Различия в структурах следящей системе с использованием СКВТ в
качестве датчиков угловых перемещений, работающих в разностном и
индикаторном режимах?
8. Особенности цифрового следящего привода.
19. Контрольные устройства (датчики)
Датчики – это устройства, реагирующие на параметры технологического
процесса или на изменения режимов работы объекта управления и
осуществляющие преобразование входной контролируемой величины в
выходной сигнал, воспринимаемый САУ. В качестве выходных величин чаще
всего используются: ЭДС или падение напряжения, ток, частота,
сопротивление (активное, индуктивное, емкостное), сдвиг фаз переменного
тока.
19.1. Основные характеристики и параметры датчиков:
Статическая характеристика - зависимость выходного сигнала от
входного в установившемся режиме.
Диапазон измерений - максимальная и минимальная величина
измеряемого параметра.
Чувствительность или коэффициент преобразования - отношение
приращения выходного сигнала к изменению входного.
Порог чувствительности - минимальное значение входного параметра,
который может быть преобразован в выходной сигнал датчика.
Точность - погрешность измерения
Динамические характеристики - время срабатывания, частота
изменения входного сигнала и др.
19.2. Классификация датчиков
Существует достаточно много различных классификаций датчиков.
Датчики классифицируются:
1. по принципу действия – емкостные, магнитные, индукционные,
фотоэлектрические и др.;
2. по виду входной величины – перемещения, давления, уровня,
температуры др.;
87
3. по способу представления измеряемой величины (по виду
преобразования) – аналоговые и цифровые.
Имеются и другие типы классификации. В частности, Датчики
перемещения классифицируются:
1. по методу измерения перемещений – абсолютные и относительные;
2. по способу сопряжения с исполнительным органом – прямые и
косвенные;
3. по типу конструктивного исполнения – линейные и круговые и др.
19.3. Примеры датчиков (контроля) в приводах станков
1. Путевые выключатели (ПВ) – это дискретные элементы автоматики,
обладающие релейной характеристикой и предназначенные доля контроля
положения подвижных частей рабочих машин и механизмов, т.е. для получения
управляющих сигналов в определенных точках пути перемещающегося
механического устройства (суппорта станка, звена манипулятора, дверцы
шкафа электроавтоматики и т.п.). В зависимости от типа коммутирующего
устройства ПВ разделяют на контактные и бесконтактные (индукционные,
генераторные).
2. Устройства контроля скорости (УКС) – устройства для контроля
оборотов вращения подвижных частей машин и выдачи на выходе логического
сигнала в электрической форме, при достижении этими оборотами некоторой
заданной величины.
В схемах торможения противотоком асинхронных электродвигателей
широко применяют индукционное реверсивные реле контроля скорости (РКС)
Одна из важнейших функции, возлагаемых на датчики в станках, это
измерение перемещений. Рассмотрим широко применяемые типы подобных
датчиков.
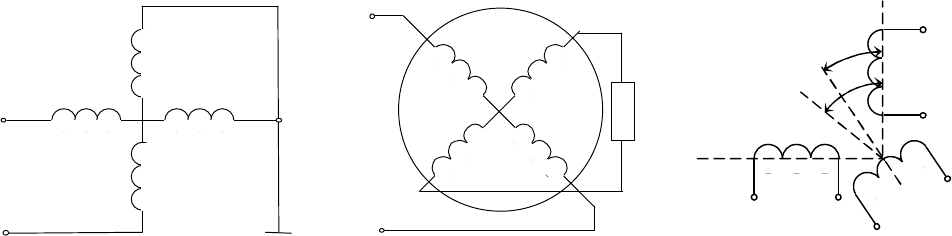
20. Индукционные датчики перемещения
Если сравнение сигналов осуществляется в аналоговой форме, то
используются аналоговые датчики. К ним относятся индуктосины (линейные,
круговые) и синусно-косинусные вращающиеся трансформаторы (ВТ).
Принцип их действия основан на физическом явлении: "если в магнитное поле,
созданное проводником, по которому протекает переменный ток, ввести второй
проводник, то в нем будет индуцироваться (наводиться) ЭДС, величина
которой зависит от их взаимного расположения и расстояния между ними". В
этих датчиках (например, вращающиеся трансформаторы) находятся две пары
обмоток – статорные и роторные. Две взаимно перпендикулярные статорные
обмотки фактически независимые, две роторные обмотки – одна
измерительная, другая – рабочая.
88
Ротор ВТ (вращающийся трансформатор) устанавливается на валу
двигателя и поворачивается в точном соответствии с поворотом двигателя.
U
c1
, U
c2
– напряжения статорных обмоток.
ист
отражает истинное положение двигателя.
истcистcр
UUкU
cossin
21
.
Вращающийся трансформатор может работать в четырех режимах:
1,2: фазовый – индикаторный и разностный;
3,4: амплитудный – индикаторный и разностный.
В каком из этих режимов работает ВТ - зависит от того, какие
напряжения подаются для запитывания статорных обмоток.
Фазовый разностный режим.
задмc
tEU
sin
1
.
задмc
tEU
cos
2
.
Если это подставить в формулу для U
р
(напряжения на роторной
обмотке), то получим:
истзадмр
tкEU
sin ,
сигнал на роторной обмотке в этом случае представляет собой
периодический синусоидальный сигнал, в котором фазовый сдвиг относительно
опорного сигнала равен разности между заданным и истинным значением угла
поворота ротора.
Если мы хотим, чтобы в структуре следящего привода на выходе датчика
поворота вала двигателя (вращающегося трансформатора) сразу формировался
сигнал, отражающий разность между заданным и истинным положением
двигателя, тогда вращающийся трансформатор должен работать в фазовом
разностном режиме.
Фазовый индикаторный режим
В этом случае:
tEU
мc
sin
1
, tEU
мc
cos
2
.
Тогда:
истмр
tкEU
sin
То есть, в этом режиме напряжение на роторной обмотке ВТ отражается
("индикатируется") истинное положение двигателя (ротора ВТ).
Амплитудный разностный режим
Здесь:
зад
U
с2
ист
U
с1
U
р
U
с1
U
с2
U
р
R
изм
89
задмc
tEU
sinsin
1
,
задмc
tEU
cossin
2
.
Тогда
истзадмр
tкEU
sinsin .
Амплитудный индикаторный режим
Здесь:
tEU
мc
sin
1
,
0
2
c
U .
Тогда
истмр
tкEU
sinsin .
Эти четыре схемы включения ВТ, в качестве датчиков углов поворота,
применяются в различных системах управления следящими приводами.
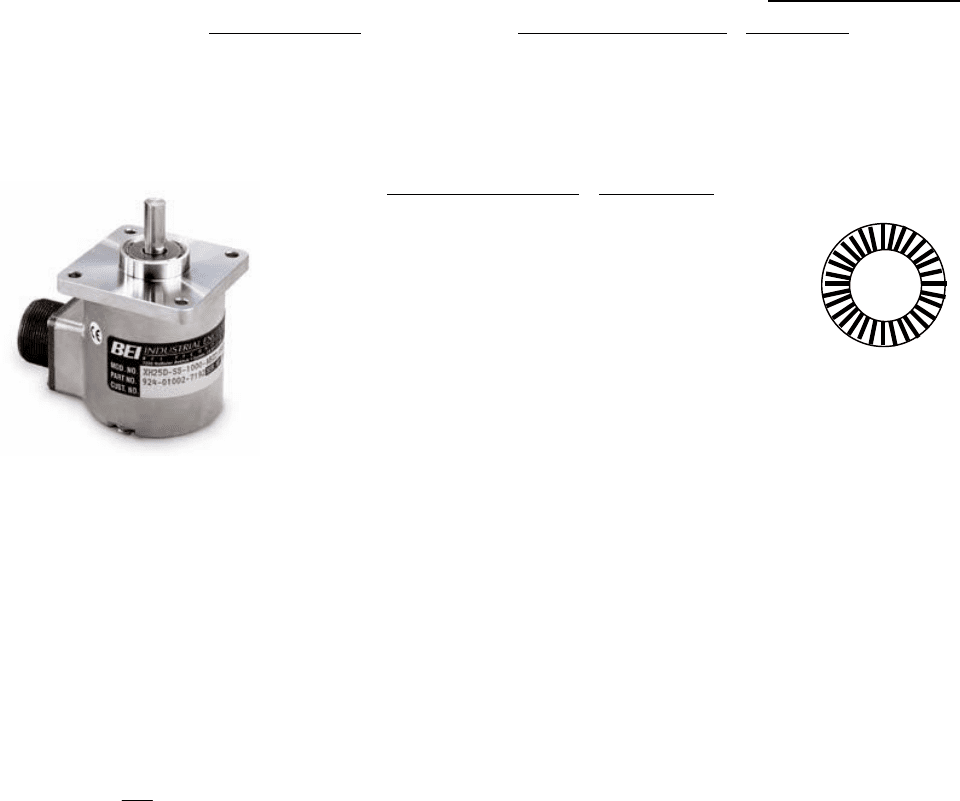
21. Цифровые датчики угловых перемещений
К цифровым датчикам перемещений относятся относительные
(Encremental) и абсолютные (Absolute) фотоимпульсные датчики (Optical
Encoder) угловых перемещений (ФИД). Иногда их называют поворотными
шифраторами. Как правило, относительные датчики обеспечивают лучшее
разрешение (точность) при меньшей стоимости по сравнению с абсолютными
датчиками.
В относительных датчиках на кодовый диск
методом фотолитографии наносится
специальная маска, которая при вращении
посредством свето- и фотодиодов,
формирует последовательность
электрических импульсов, количество
которых пропорционально углу поворота.
Точность измерения угла поворота у ФИД
определяется количеством импульсов N, формируемых
датчиком за один оборот. Типовыми значениями
являются, например: N = 200, 400, 500, 1000, 1024, 2500, 4096, 5000.
Максимальная частота выходных импульсов ФИД может достигать 100
кГц.
Угол поворота, измеряемый таким датчиком вычисляется по формуле:
n
,
где:
- дискретность датчика, приведенная к углу поворота;
n - количество импульсов, снимаемых с датчика.
Дискретность датчика по углу поворота
определяется :
N
2
, где N – количество импульсов за полный оборот ФИДа.
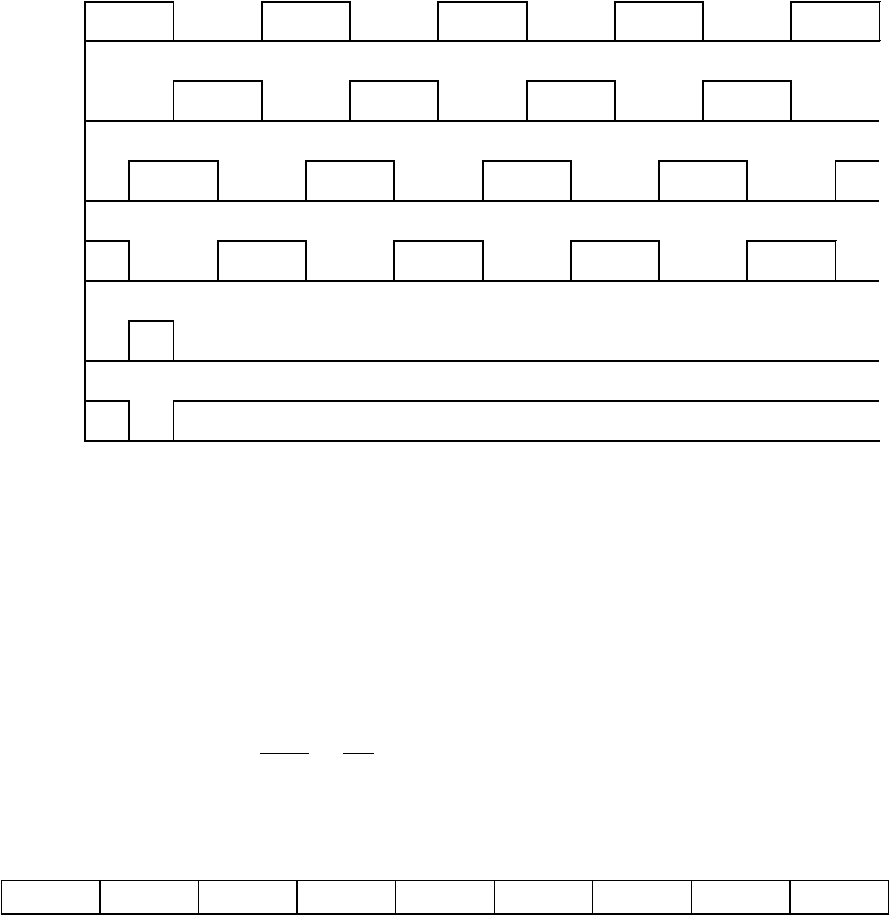
У простейшего инкрементного ФИД имеется только один импульсный
выход "А". Для того, чтобы имелась возможность определить не только
величину, но и направление движения датчики формируют вторую
последовательность импульсов "В", сдвинутых по фазе относительно первой на
четверть периода. Сигналы А и В называют иногда квадратурными сигналами.
90
Число выводов в этом случае равно 4, например, у отечественного
фотоэлектрического преобразователя угол-код ФЭП-1Н имеются две
последовательности выходных сигналов, питание (5В) и земля.
Для реализации режима точной начальной установки и подсчета числа
полных оборотов относительные датчики могут иметь выход "Z", на котором
формируется один импульс за полный оборот. При появлении Z-импульса
двигатель останавливается. В этом случае точность будет определяться с
точностью, равной дискретности датчика по углу поворота. Иногда выходы
датчика дополняются их инверсными состояниями. Таким образом, полный
набор выходных сигналов ФИД включает в себя 6 сигналов: A,A, B,B, Z,Z.
Точность линейного перемещения
S
определяется следующим образом:
XBPS
TK
,
где
P
K - коэффициент преобразования редуктора (если он отсутствует,
то
P
K =1);
XB
T - шаг ходового винта.
Например, при
2/2ммT
XB
, и N=1000
ммTK
XBPS
002,0
2
2
1
1000
2
= 2 мкм.
Инкрементный датчик фирмы BEI может иметь 8 выводов и потребитель
в своем заказе заполняет соответствующие позиции:
H 25 D SS 250 ABZ С 7406R
LED SM16
D (E, G) – тип фланца: круглый, квадратный;
t
t
t
t
t
t