Аблязов В.И. Конспект лекций. Автоматизированное управление процессами и системами
Подождите немного. Документ загружается.

71
6. Определяется стандартное программное обеспечение для данного ПЛК.
7. Определяется стоимость данного заказа;
8. Осуществляется программирование всей системы.
72
14. Системы управления на базе персональных ЭВМ
14.1. Структура системы управления на базе ПЭВМ
Расширение функциональных возможностей персональных компьютеров
и развитие средств коммуникаций между терминальными устройствами
явилось следствием того, что часто для целей управления различными
объектами используются персональные компьютеры, например, типа PC IBM.
Дополнительным преимуществом использования персональных компьютеров
является то, что при этом возможно непосредственное использование
многочисленных наработанных программных пакетов: автоматизированного
проектирования, диагностики и пр.
Фирмы производители, уловив эту тенденцию, разработали и выпускают
широкую гамму различных устройств, встраиваемых или стыкуемых с
персональными компьютерами, и обеспечивающих разнообразные протоколы
связи, преобразование и формирование сигналов, подключение различных
сервисных устройств и т.д. Платы, осуществляющие обмен (и управление)
информацией между РС и другими устройствами устанавливаются обычно на
материнскую плату РС и имеют в своем составе локальные процессоры,
образуя при этом многоуровневое управление.
Примером подобной системы может служить разработанная в СПбГПУ
модульная технологическая линия для автоматизированного проектирования и
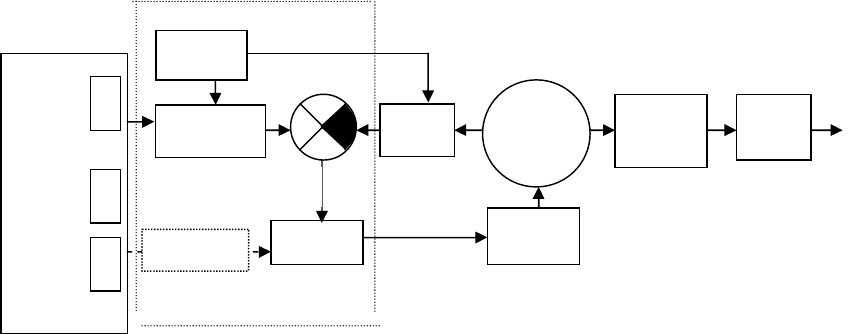
изготовления деталей произвольной формы из металлической ленты (рис. 22).
Сокращенно "Автоматизированная гибочная машина" (АГМ).
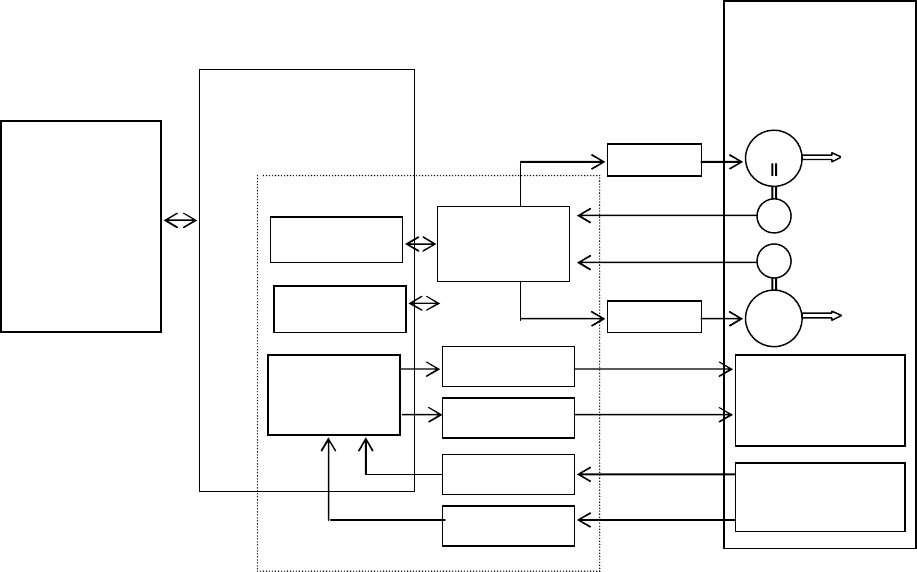
Рис. 22. Структура АГМ
Периферия
(монитор,
клавиатура,
мышь,
принтер, …)
PC IBM
Центральный
процессор
MC
-
3628
Connector
board
Автоматизиров
анная гибоч
ная
машина
Контроллер
PCL-720
PCLD-785
PCLD-785
PCLD-782
PCLD-782
ФСУП
ФСУП
Д
Д
X
1
Y
1
ФИД
ФИД
MC
-
3628
Релейная
гидроавтомат
ика
Релейные
датчики
73
Комплекс АГМ предназначен для изготовления в автоматическом режиме
сложных произвольных криволинейных контуров методом гибки из полосовой
профильной ленты толщиной до 2мм и шириной до 300 мм в условиях гибкого
автоматизированного производства декоративно-рекламных изделий
наружного и внутреннего интерьеров.
В состав комплекса входят автоматизированная гибочная машина (АГМ)
с блоком электрогидроавтоматики (БЭГА) и двухуровневая система
управления с персональным компьютером на верхнем уровне и контроллером
на нижнем (см. рис. 22). Программное обеспечение включает пакеты,
обеспечивающие сквозной цикл проектирования (CAD Computer Automated
Design) и изготовления (CAM Computer Automated Manufacture) изделий из
металлической ленты. В состав гибочной машины входят блок перемещения
ленты, два двухкоординатных манипулятора (по координатам X
1
и Y
1
– первый
манипулятор, и по координатам X
2
и Y
2
- второй) с магазинами инструментов, а
также необходимые исполнительные механизмы и датчики (рис. 23).
Непосредственное формирование логически-временной последовательности
сигналов, управляющих исполнительными механизмами, происходит в
программируемом контроллере.
Контроллер нижнего уровня реализован на базе двух плат управления
движением МС-3628 (Motion Controller) с двумя переходными платами 3628CB
(Connector Board), одной платы PCL-720 (PC-Lab), двух плат выдачи сигналов
PCLD-785 (PC-Lab-Daughter) и двух плат приема сигналов PCLD-782. В
контроллере содержится автономный источник питания, к которому
подключены также фотоимпульсные датчики.
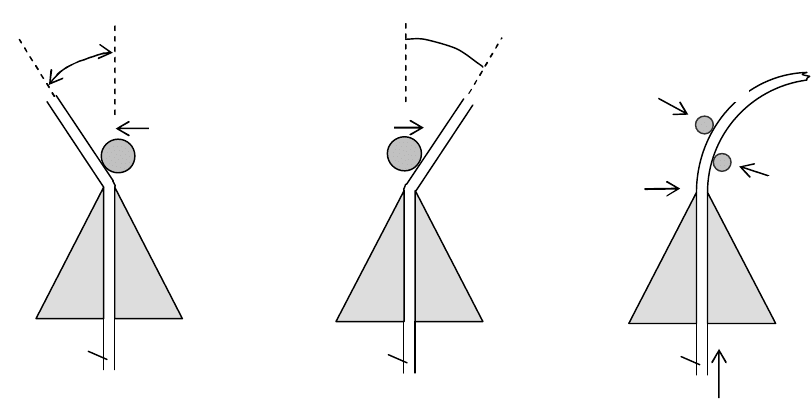
Рис. 23 Алгоритмы гиба полоскового профиля
Процессорные платы контроллера нижнего уровня, а именно, МС-3628 и
PCL-720 устанавливаются непосредственно на материнскую плату компьютера
и подключаются прямо к системной шине ЭВМ. Для задания адресов регистров
плат МС3628 в адресном пространстве PC на этих платах переключателями
Лента
X
2
Лента
X
1
Лента
F
F/2
F/2
X
1
Y
1
X
2
Y
2
2
1
74
установлены их базовые адреса: 0х300 Нех и 0х320 Нех. Для задания адресов
регистров платы PCL-720 в адресном пространстве PC на ней переключателями
установлен базовый адрес 0х2А0 Нех.
Формирование произвольного цилиндрического профиля из исходной
ленты осуществляется путем задания одновременного движения ленты и
различных траекторий движения манипуляторов. Например, при движении
второго манипулятора по координате Х
2
(справа налево) происходит гиб на
заданный угол
2
, в зависимости от конечного положения манипулятора
Х
2
(рис. 23). При протягивании (проталкивании) ленты между двумя
манипуляторами, установленных в точках с координатами X
1
, Y
1
и X
2
, Y
2
происходит гиб по заданному радиусу и т.д. Комплект сменяемых
инструментов позволяет выполнять гибы на углы до 135, а также гибы по
дугам с радиусами от 10 мм до 3 м. Таким образом, элементарными кривыми
задаваемого у ленты профиля являются отрезки прямых и дуги окружностей.
Кроме того, комплекс позволяет выполнять ряд дополнительных функций:
формовку спецпрофилей для соединения заподлицо, отрезку, съем готового
изделия и др.
В задачу контроллера входит управление движением по пяти
координатам (два двухкоординатных манипулятора и перемещение ленты) и
выдача (смена инструмента, зажим-разжим ленты, отрезка ленты, диапазон
скорости и др.) и прием (фиксация инструмента, лента установлена,
манипулятор в верхнем/нижнем положении и др.) необходимых релейных
сигналов.
14.2. Контроллер управления движением МС-3628
Контроллер управления движением МС-3628 (Motion Controller)
совместно с переходной платой 3628CB (Connector Board) фирмы Omnitech
Robotics (США) обеспечивают возможность одновременного управления
движением в следящем режиме по трем независимым координатам. Имеются
модификации данного модуля для управления одной и двумя координатами.
Плата МС-3628 устанавливается непосредственно в РС, а плата MC-3628CB,
устанавливаемая вне РС, соединяется с ней гибким кабелем.
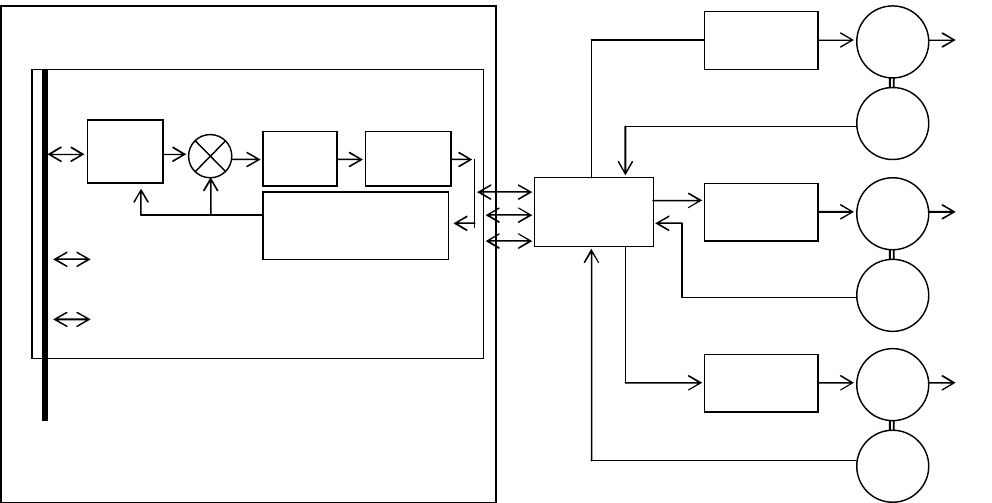
В каждом канале контроллера МС-3628 в соответствии с заданным
значением координаты или заданным алгоритмом движения в реальном
масштабе времени формируются значения координат (обновление кодов
осуществляется с периодом Т=341 мкс.). Эти значения текущих координат
передаются в формирователь заданного кодов (ФЗК), который вырабатывает
код задания по координате. Формирование кодов происходит с учетом
заданной скорости и ускорения по координатам. Сравнение данных кодов с
величиной истинного значения координаты осуществляется в устройстве
сравнения, в котором вычисляется рассогласование между заданным и
истинным положением.
Сигнал истинного положения формируется в интерфейсном устройстве,
на вход которого подаются сигналы с фотоимпульсного датчика перемещений.
75
Сигнал рассогласования между заданием и истинным положением через
цифровой фильтр поступает в 12-разрядный цифроаналоговый
преобразователь. На выходе ЦАП формируется аналоговый сигнал задания
значения координаты (пределы его изменения 10В), который далее поступает
через переходную плату на усилитель-формирователь сигналов управления
приводом (ФСУП). В результате этого двигатель начинает вращаться с угловой
скоростью и осуществляется нужный поворот вала двигателя (рис. 24).
Рис. 24. Структура подключения модулей управления движением
Контроллер движения может обеспечивать управление как в режиме
выхода в заданную точку, так и в режиме движения с заданной скоростью или
ускорением. В первом случае (режим - The Position Control Mode), движение
осуществляется с максимальной скоростью, естественно с разгоном и
торможением. Во втором случае (режим - The Velocity Control Mode) движение
осуществляется путем задания направления (знак "+" или "–" сигнала с ЦАП) и
требуемой скорости движения (величина сигнала с ЦАП).
Все три канала работают аналогично.
14.3. Модули обмена цифровыми сигналами в РС
Модуль цифровых входов-выходов PCL-720 (PC Lab Digital I/O and
Counter Card) фирмы Аdvantech Co. устанавливается непосредственно на
материнскую плату персонального компьютера и при этом каждому цифровому
сигналу (входа-выхода) соответствует определенный бит регистра в памяти РС.
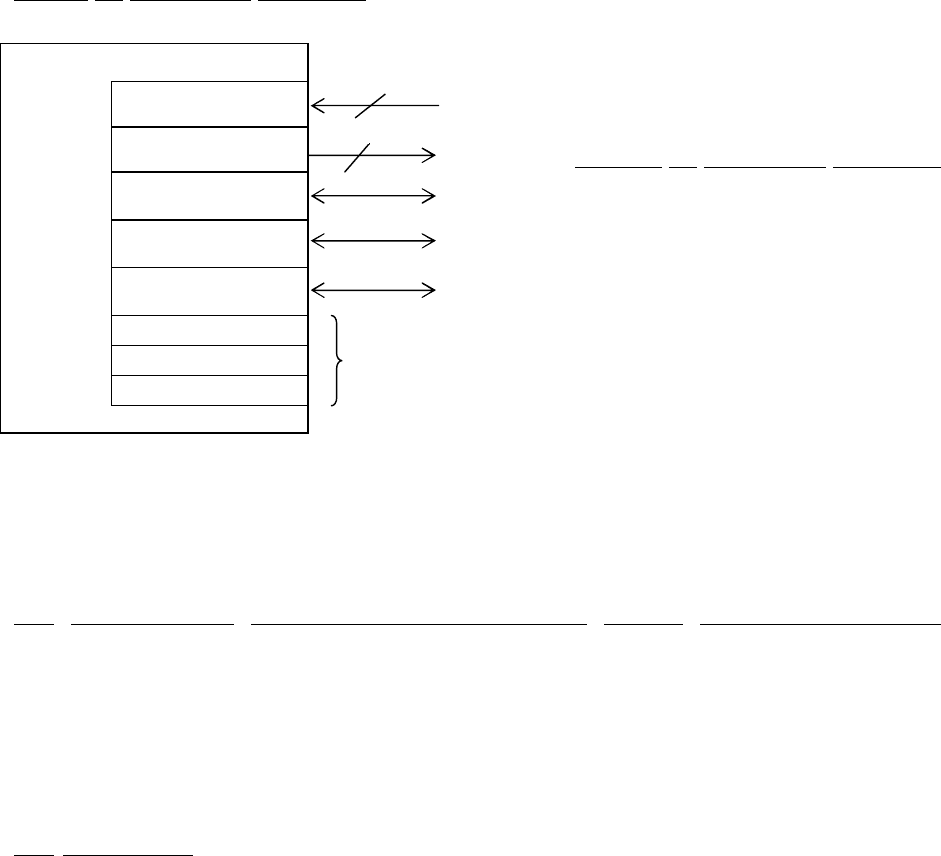
Модуль PCL-720 обеспечивает (рис. 25):
РС
МС-3628
3628СВ
ФСУП
Д
ФИД
ФСУП
Д
ФИД
ФСУП
Д
ФИД
ФЗК
ЦФ ЦАП
Интерфейс
сигналов ФИД
–
+
2 коорд.
3 коорд.
76
прием 32 цифровых сигналов с характеристиками сигналов:
низкий уровень
min -0,5В, max 0,8В;
высокий уровень
min 2,0В, max 5,0В
выдачу 32 цифровых сигналов
со следующими
характеристиками:
низкий уровень
(втекающий)
max 0,5В при 24 мА, max
0,4В при 12 мА;
высокий уровень
min 2,0В при 15 мА, min
2,4В при 3 мА.
Рис. 25. Схема модуля PCL-720
три 16-разрядных программно-настраиваемых канала таймеров-счетчиков
(Timer/counter 1 – 3), выполняющих функции:
формирование произвольно задаваемых временных интервалов с
дискретностью, определяемой длительностью временных интервалов
внутренних генераторов,
подсчет числа приходящих извне импульсов;
три генератора фиксированной частоты F
фикс.
на 1 МГц, 100 кГц и 10 кГц, с
возможностью выбора переключателями (Jumpers) коэффициента умножения
К
умн.
этих частот К
умн.
= 2, 1, 1/2, 1/4.
F
вых.
= F
фикс.
К
умн
Если при приёме сигналов необходимо обеспечить гальваническую
развязку от принимаемых сигналов, тогда приём сигналов в PCL-720
осуществляется через вспомогательный модуль приема цифровых сигналов
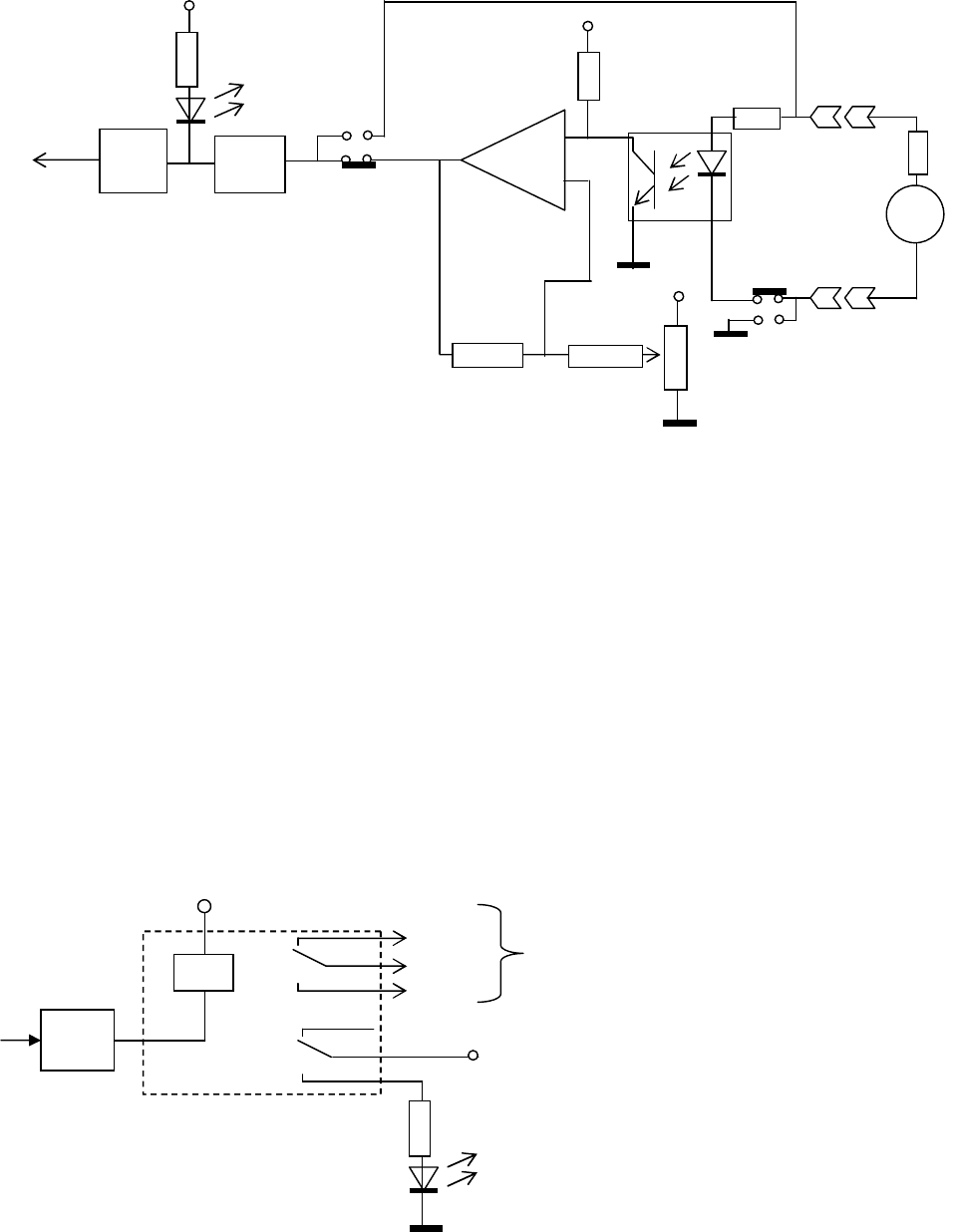
PCLD-782 (PC Lab Daughter 16 Channel Opto-isolated D/I Board),
принципиальная схема которого для одного канала показана на рисунке.
Состояние принимаемого сигнала, 0 или 1, показывает светоизлучающий диод.
Гальваническая развязка по каждому каналу обеспечивается оптронами.
Внутреннее ограничительное сопротивление (560 Ом) обеспечивает защиту
оптрона от коротких замыканий входа на источник питания. В данном модуле
имеются регулировки уровня срабатывания по входу. Состояние входного
сигнала контролируется светодиодом.
PCL-720
In
32
Out
32
Timer/counter 1
Timer/counter 2
Timer/counter 3
1
МГц
100 к
Гц
10 к
Гц
х 2, 1/2, 1/4
77
Рис. 26. Схема модуля PCLD-782
Применение модуля PCLD-782 целесообразно и в том случае, если не
требуется гальваническая развязка, поскольку при этом уменьшается число
доступов (внешних проводов) в корпус РС. Специальный переключатель
режима определяет включение гальванической развязки.
При необходимости управления мощными силовыми цепями выдача
сигналов ведется через модуль PCLD-785 (PC Lab Daughter 16 Channel Relay
Output Board). Схема одного канала такого модуля показана на рисунке.
Через "нормально-замкнутые" (НЗК) или "нормально-разомкнутые
контакты" (НРК) осуществляется управление силовыми цепями.
Контакты
обеспечивают
подключение цепей
переменного тока
127/220В с токами до 1А.
Задержка времени
включения 3мс,
выключения 2мс.
Контакты реле
допускают до 5 млн
включений. Ток
потребления на одно реле 33мА. При всех включенных реле ток потребления
(12В) 0,53А.
При необходимости приема-выдачи аналоговых сигналов через РС к ним
подключаются аналогичные аналоговые модули.
Реле
+12
В
НЗК
Общ.
НОК
+5В
СИД
330
1
К
объекту
управлен
ия
V
вх
+
-
Оптрон
Компа-
ратор
+
-
4,7К
10К
1М
560
500
Гал. разв.
СИД
Гал. разв.
1
1
330
78
Контрольные вопросы
1. Преимущества и недостатки построения систем управления на базе ПК
2. Отличие координатного управления от логического
3. Что определяют переключатели базовых адресов на Плате цифровых
входов-выходов PCL-720 и на платах Контроллера управления
движением МС-3628
4. В каком виде формируется сигнал на ФСУП от контроллера управления
движением МС-3628
5. Какие режимы управления обеспечиваются в контроллере управления
движением МС-3628
6. Чем определяется гальваническая развязка от принимаемых сигналов в
плате приема цифровых сигналов PCLD-782
7. Произойдет ли сбой в управлении оборудованием, если в плате выдачи
цифровых сигналов PCLD-785 выйдет из строя светодиод СИД
8. В плате PCL-720 что происходит с максимальным значением выходного
сигнала Out низкого уровня при увеличении втекающего тока?
9. В плате PCL-720 что происходит с минимальным значением выходного
сигнала Out высокого уровня при увеличении вытекающего тока?
15. Формирование управляющих воздействий в следящем приводе
При контурном управлении в процессорном управляющем устройстве в
реальном масштабе времени по определенным алгоритмам интерполяции
осуществляется вычисление текущих значений координат X, Y, Z. Значения
текущих координат записываются (выдаются) в выходные порты-регистры P
x
,
P
y
, P
z
и далее поступают в устройство связи с объектом (УСО), в котором
осуществляется преобразование цифровых кодов XР
k
, YР
k
, ZР
k
в аналоговый
вид U
зад
, если датчик перемещений является аналоговым, или в
соответствующий цифровой вид, если используется цифровые датчики. Частота
обновления значений в регистрах формирования на привод кода текущих
координат зависит от ряда факторов: быстродействия привода, максимально
допустимой скорости перемещения, алгоритмов интерполяции и других
факторов. В современных приводах период обновления лежит в пределах от 1
до 10 мс.
В следящей системе формируется электрический сигнал, величина
которого, пропорциональна рассогласованию между заданным и истинным
значением координаты. Этот сигнал поступает в привод, который вырабатывает
соответствующее требуемому повороту воздействие на двигатель.
Кодовые значения текущих значений XР
k
, YР
k
, ZР
k
в выходных регистрах
периодически обновляются. Период их обновления зависит от: характеристик
привода, производительности процессора, алгоритмов интерполяции. Для
современных приводов период обновления управляющих воздействий
равняется 1…5 мс. При большем периоде обновлении нарушается плавность
управления.
79
Далее они поступают на функциональный ЦАП. ФЦАП вырабатывает
аналоговый сигнал, один из параметров которого (напряжение, фазовый сдвиг,
частота и др.) несет информацию о текущем значении координты. Вид сигнала
с ФЦАП должен быть аналогичным сигналу с датчика угла поворота.
Далее сигнал U
зад
поступает на сравнивающее устройство, в котором
осуществляется сравнение сигнала задания и истинного положения и
формирование сигнала
U, величина которого, пропорциональна
рассогласованию между заданным и истинным значением координаты.
Формирователь сигнала управления приводом (ФСУП) вырабатывает сигнал
управления электроприводом. Электропривод вырабатывает воздействие на
двигатель, которое обеспечивает поворот двигателя, уменьшая величину
рассогласования между заданным и истинным положением. Чем больше
величина рассогласования, тем больше управляющее воздействие, стремящее
уменьшить величину рассогласования.
Для повышения быстродействия привода и улучшения его динамических
характеристик иногда на ФСУП дополнительно подают на ФСУП, особенно
при больших величинах рассогласования, корректирующее воздействие,
пропорциональное скорости изменения координаты. Этот сигнал формируется
на основе кода скорости по соответствующей координате функциональным
ЦАП скорости.
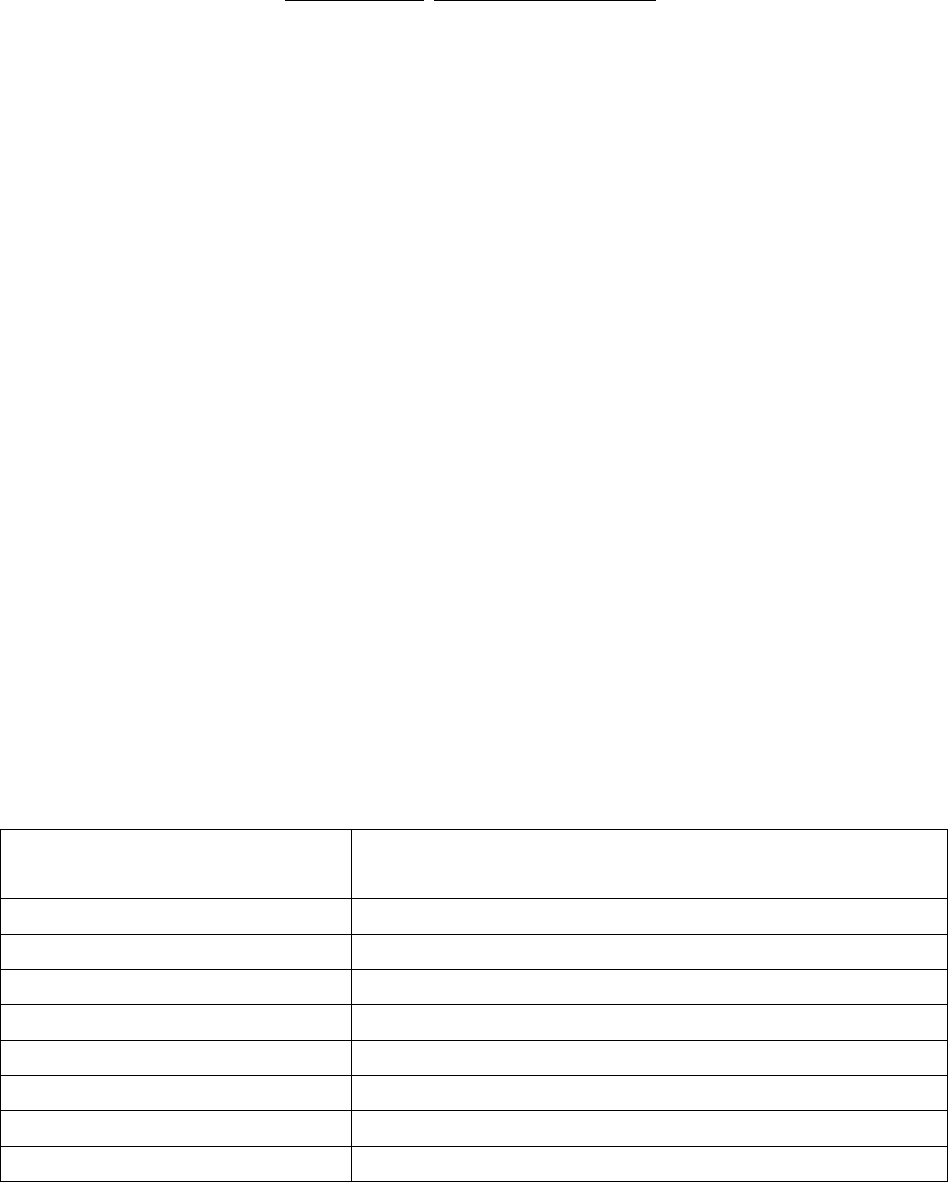
Структура следящей системы по одной координате показана на рисунке.
Устройство сопряжения СЧПУ с приводом и двигателем часто называют
устройством согласования с приводом (УСП) или устройством сопряжения с
объектом (УСО). В общем случае УСО решает три задачи:
Получение и преобразование информации о заданном положении;
Получение информации об истинном положении рабочего органа;
Формирование управляющих воздействий на привод.
Если замыкание контура обратной связи по положению происходит через
СЧПУ, что часто бывает в случае применения цифровых датчиков, то СЧПУ
берет на себя функцию формирования в цифровом виде сигнала
рассогласования.. Тогда функции УСО сводятся только к преобразованию этого
цифрового сигнала в соответствующее управляющее воздействие на привод
станка.
U
скор
СЧПУ
Р
Z
ФЦАПП
ДП
Д
Редукт
ор
Тхв
ФСУП
ЭП
U
Зад
U
ист
S
U
УСО
ИОС
Р
ск
Р
X
ФЦАПС
80
Часто термином с ле д я щ и й э ле к т р опр и во д обозначают УСО+ ЭП.
Естественно, структура следящей системы и конкретные ее реализации
могут отличаться от приведенной. Это зависит от контура обратной связи, типа
двигателя, датчиков перемещений (поворота), используемого в контуре ОС,
способов реализации УСО и др.
Если датчик перемещений, включенный в цепь обратной связи,
отслеживает угол поворота вала, то он может быть соединен с валом
непосредственно (показано на рисунке) или через редуктор с передаточным
числом (от двигателя до датчика обратной связи), равным i
Дв.-ДОС
. Тогда угол
поворота ДОС
Д О С
определяется следующим образом:
Д О С
=
и с т
i
Д в . - Д О С
.
Если вал двигателя соединен с ходовым винтом стола через редуктор с
передаточным числом i
Дв.-ХВ
(от двигателя до ходового винта), то Линейные
перемещения S
и с т
будут связаны углом поворота следующими соотношениями:
S
и с т
=
и с т
о б о р
i
Дв.-ХВ
.
Т
ХВ
=
и с т
р а д
i
Дв.-ХВ
.)
Т
ХВ
/ 2
.
16. Представление координатных перемещений в ЭВМ
n-разрядный код координаты Rg
X
, Rg
Y
, Rg
Z
выходного регистра
управляющего устройства определяет (задает) угол поворота двигателя в
пределах, как правило, одного оборота. Если код координаты Rg
X
, Rg
Y
, Rg
Z
принимает только положительные значения (без знакового разряда), тогда,
например, для 3-разрядного регистра значения кодов в нём будут
соответствовать следующим углам
поворота вала двигателя, а,
следовательно, и соответствующим фазовым сдвигам
з а д
сигнала задания
поворота (перемещения) по координате.
Код выходного регистра
Rg
X
Угол поворота
двигателя (фазовый сдвиг
з а д
сигнала задания), рад
000
0 (2, 4, …)
001
/4 (2, 4, …)
010
/2 (2, 4, …)
011
3/4 (2, 4, …)
100
(2, 4, …)
101
5/4 (–3/4) (2, 4, …)
110
3/2 (–/2) (2, 4, …)
111
7/4 (–/4) (2, 4, …)
Естественно, что требуемое количество разрядов выходного регистра
определяется заданной точностью управления.
Угол фазового сдвига
з а д
в синусоидальном сигнале, формируемого
следящей системой, а, следовательно и заданный угол поворота
двигателя, определяется следующим образом:
MPXзад
Rg
рад (1).