Alligood K., Sauer T., Yorke J.A. Chaos: An Introduction to Dynamical Systems
Подождите немного. Документ загружается.

C HAPTER T EN
Sta ble Ma n ifo ld s
and Crises
W
E INTRODUCED the subject of stable and unstable manifolds for saddles of
planar maps in Chapter 2. There we emphasized that Poincar
´
e used properties
of these sets to predict when systems would contain complicated dynamics. He
showed that if the stable and unstable manifolds crossed, there was behavior that
we now call chaos. For a saddle fixed point in the plane, these “manifolds” are
curves that can be highly convoluted. In general, we cannot hope to describe the
manifolds with simple formulas, and we need to investigate properties that do
not depend on this knowledge. Recall that for an invertible map of the plane and
a fixed point saddle p, the stable manifold of p is the set of initial points whose
forward orbits (under iteration by the map) converge to p, and the unstable
manifold of p is the set whose backward orbits (under iteration by the inverse of
the map) converge to p.
399
S TA B LE M ANIFOLDS AND C RISES
4
−π
π
−2
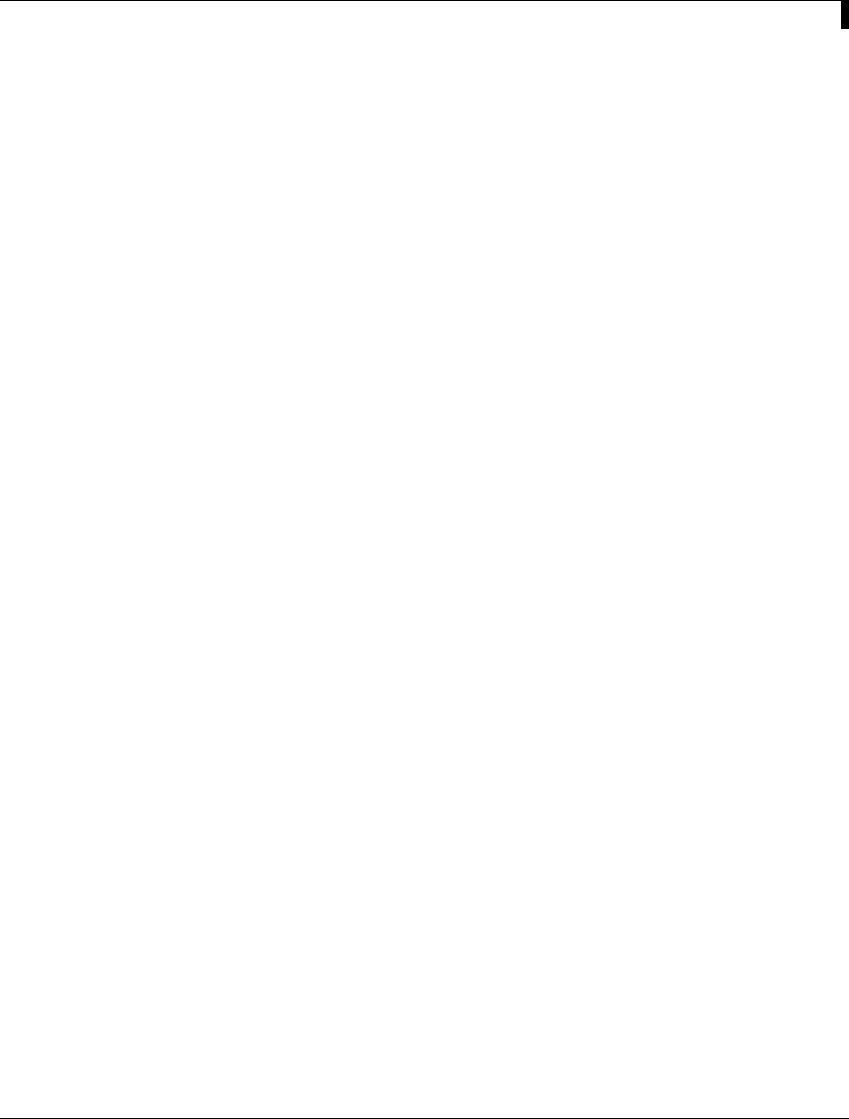
Figure 10.1 Stable and unstable manifolds for a fixed point saddle the forced,
damped pendulum.
A cross marks a saddle fixed point of the time-2
map of the forced, damped
pendulum with equation of motion
¨
x ⫹ .2
˙
x ⫹ sin x ⫽ 2.5cost. The stable manifold
emanates from the saddle in the direction of an eigenvector V
s
⬇ (1, 0.88), and
the unstable manifold emanates from the saddle in the direction of an eigenvector
V
u
⬇ (1, ⫺0.59). A finite segment of each of these manifolds was computed. Larger
segments would show more complex patterns.
Figure 10.1 shows numerically calculated stable and unstable manifolds of
a saddle fixed point of the time-2
map of a forced damped pendulum, whose
motion satisfies the differential equation
¨
x ⫹ .2
˙
x ⫹ sin x ⫽ 2.5cost. The saddle
fixed point p ⬇ (⫺.99, ⫺.33) is marked with a cross. The eigenvalues of the
Jacobian evaluated at p are s ⬇ ⫺0.13 and u ⬇ ⫺2.26. The stable manifold
S(p)
emanates from p in the direction of an eigenvector V
s
⬇ (1, 0.88) associated
with s, and the unstable manifold
U(p) emanates from p in the direction of an
eigenvector V
u
⬇ (1, ⫺0.59) associated with u. Although these manifolds are
far too complicated to be described by a simple formula, they still retain the form
of a one-dimensional curve we observed of all the examples in Chapter 2. Don’t
forget that points on the left side of the figure (at x ⫽⫺
) match up with points
on the right side (at x ⫽
), so that the curves, as far as they are calculated, have
no endpoints. It has been conjectured that the stable manifold comes arbitrarily
close to every point in the cylinder [⫺
,
] ⫻ ⺢. Of course, here we have plotted
only a finite segment of that manifold.
400

10.1 THE S TABL E M ANIFOLD T HEOREM
The stable and unstable manifolds shown here look deceptively like tra-
jectories of a differential equation, except for the striking difference that these
curves cross each other. (The stable manifold does not cross itself, and the unsta-
ble manifold does not cross itself.) We stress that there is no contradiction here:
although distinct solutions of an autonomous differential equation in the plane
cannot cross, the stable and unstable manifolds of a saddle fixed point of a plane
map are made up of infinitely many distinct, discrete orbits. Points in the inter-
section of stable and unstable manifolds are points whose forward orbits converge
to the saddle (since they are in the stable manifold) and whose backward orbits
converge to the saddle (since they are in the unstable manifold). As we shall see
in Section 10.2, when stable and unstable manifolds cross, chaos follows.
We begin this chapter with an important theorem which guarantees that
the stable and unstable manifolds of a planar saddle are one-dimensional curves.
10.1 THE STABLE MANIFOLD THEOREM
For a linear map of the plane, the stable and unstable manifolds of a saddle are
lines in the direction of the eigenvectors. For nonlinear maps, as we have seen,
the manifolds can be curved and highly tangled. Just as with nonlinear sinks and
sources, however, more can be said about the structure of stable and unstable
manifolds for a nonlinear saddle by looking at the derivative, the Jacobian matrix
evaluated at the fixed point. If, for example, 0 is a fixed-point saddle of a map
f, then the stable and unstable manifolds of 0 under f are approximated in a
neighborhood of 0 by the stable and unstable manifolds of 0 under L(x) ⫽ Ax,
where A ⫽ Df(0). The relationship between the stable manifold of 0 under f
and of the stable manifold under Df(0) is given by the Stable Manifold Theorem,
the main result of this chapter.
Suppose, for example, we look at the map
f(x, y) ⫽ (.5x ⫹ g(x, y), 3y ⫹ h(x, y)),
where all terms of the functions g and h are of order two or greater in x and y;
functions like x
2
⫹ y
2
or xy ⫹ y
3
. Then the eigenvalues of Df(0)are.5and3,and
0 is a fixed point saddle. We will see that the initial piece of the stable manifold
of 0, called the local stable manifold, emanates from 0 as the graph of a function
y ⫽
(x). In addition, the x-axis is tangent to S at 0,thatis
(0) ⫽ 0. See
Figure 10.2(a), which shows local stable and unstable manifolds. Globally, (that
is, beyond this initial piece), the stable manifold
S may wind around and not
be expressible as a function of x. It will, however, retain its one-dimensionality:
S is a smooth curve with no endpoints, corners, or crossing points. See Figure
401
S TA B LE M ANIFOLDS AND C RISES
x
y
U
S
y = h(x)
x
y
S
U
(a) (b)
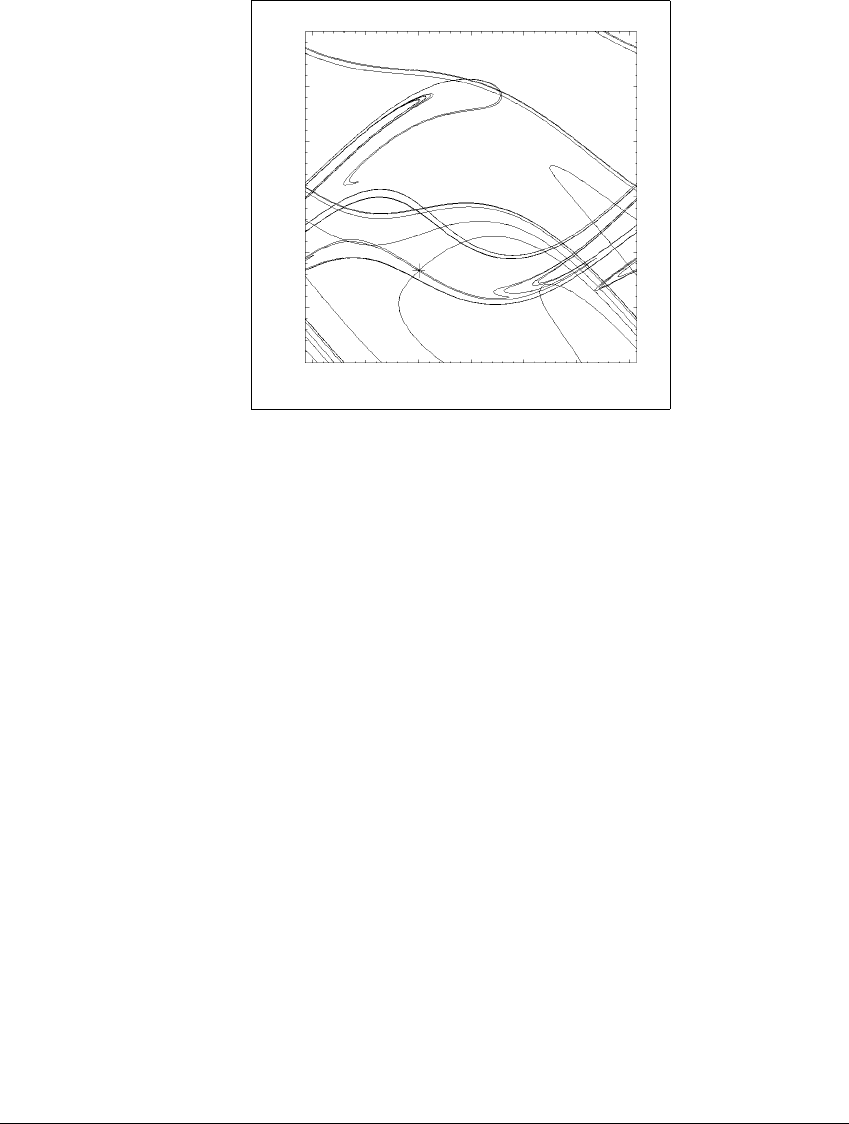
Figure 10.2 Stable and unstable manifolds for a saddle in the plane.
(a) The local stable and unstable manifolds emanate from 0. (b) Globally, the stable
and unstable manifolds are one-dimensional manifolds.
10.2(b). We saw in Chapter 2 that such set is called a one-manifold. In the
case of a saddle in the plane, the stable manifold is the image of a one-to-one
differentiable function r, where r : ⺢ → ⺢
2
. The unstable manifold U(0)isalsoa
one-manifold that emanates from the origin in the direction of the y-axis. Figure
10.3 illustrates one-dimensional stable and unstable manifolds emanating from
the origin as described.
S
U
V
s
V
u
p
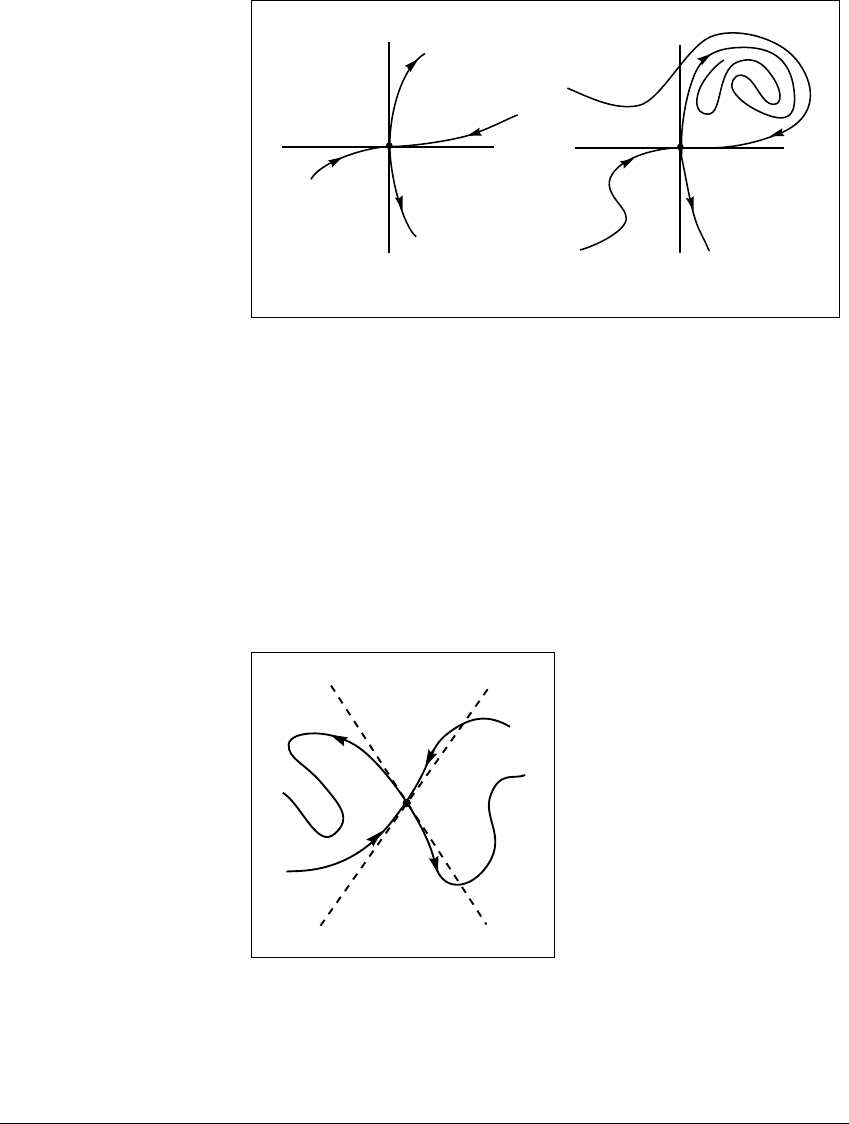
Figure 10.3 Illustration of the Stable Manifold Theorem.
The eigenvector V
s
is tangent to the stable manifold S at p, and the eigenvector
V
u
is tangent to the unstable manifold U. The manifolds are curves that can wind
through a region infinitely many times. Here we show a finite segment of these
manifolds.
402
10.1 THE S TABL E M ANIFOLD T HEOREM
We state the theorem for a fixed-point saddle in the plane and discuss
the higher-dimensional version in Sec. 10.5. The theorem says that the stable
and unstable manifolds are one-manifolds, in the topological sense, and that
they emanate from the fixed point in the same direction as the corresponding
eigenvectors of the Jacobian. Figure 10.3 illustrates the theorem: The stable
manifold
S emanates from the saddle p in the direction of an eigenvector V
s
,
while the unstable manifold
U emanates in the direction of an eigenvector V
u
.
A corresponding version of the theorem holds for periodic points, in which
case each point in the periodic orbit has a stable and an unstable manifold. We
assume that maps are one-to-one with continuous inverses. Such maps are called
homeomorphisms. Smooth homeomorphisms (in which both the map and its
inverse are smooth) are called diffeomorphisms.
Theorem 10.1 (Stable Manifold Theorem.)Letf be a diffeomorphism of
⺢
2
. Assume that f has a fi xed-point saddle p such that Df(p) has one eigenvalue s with
|s| ⬍ 1 and one eigenvalue u with |u| ⬎ 1.LetV
s
be an eigenvector corresponding to
s, and let V
u
be an eigenvector corresponding to u.
Then both the stable manifold
S of p and the unstable manifold U of p are one-
dimensional manifolds (curves) that contain p. Furthermore, the vector V
s
is tangent to
S at p,andV
u
is tangent to U at p.
Section 10.4 is devoted to a proof of the Stable Manifold Theorem. We end
this section with examples illustrating the theorem.
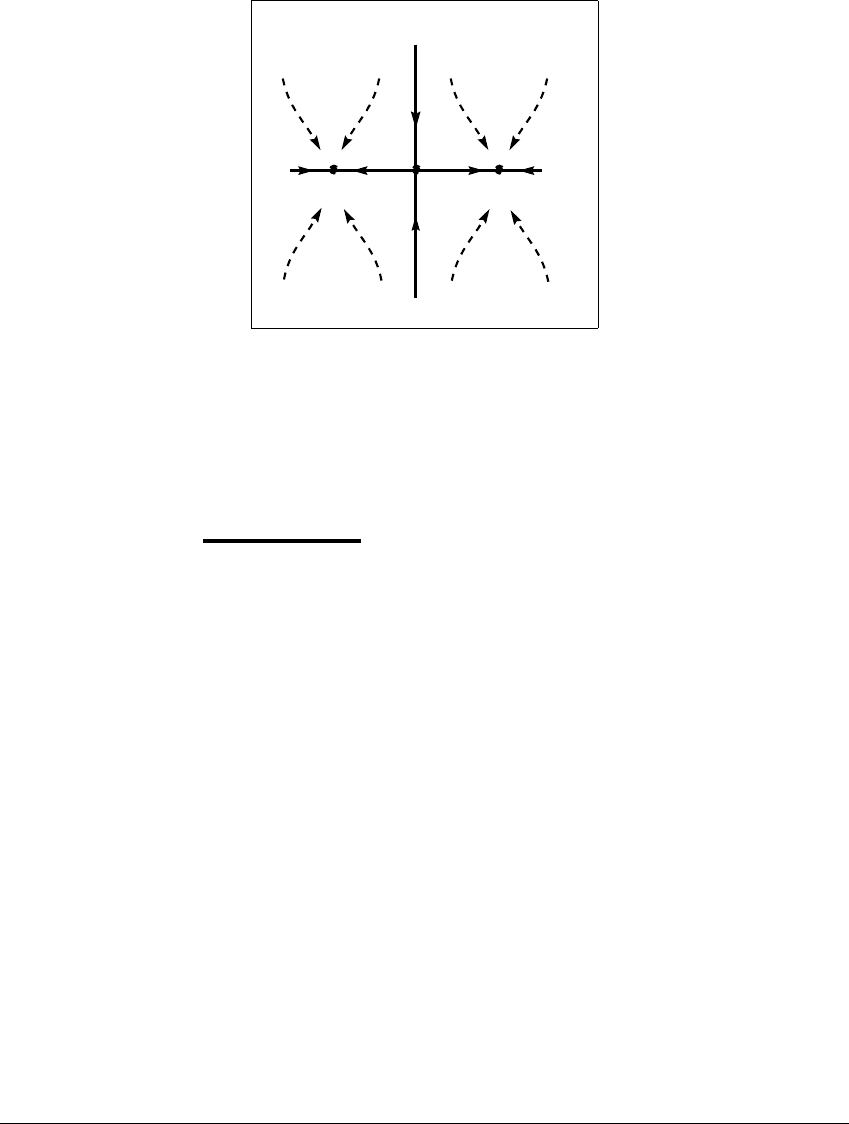
E XAMPLE 10.2
Let f(x, y) ⫽ ((4
) arctan x, y 2). This map has two fixed-point attrac-
tors, (⫺1, 0) and (1, 0), and a fixed-point saddle (0, 0). The stable manifold of
(0, 0) is the y-axis. See Figure 10.4. The unstable manifold of (0, 0) is the set
兵(x, y):⫺1 ⬍ x ⬍ 1andy ⫽ 0其. The orbits of all points in the left half-plane
are attracted to (⫺1, 0), and those of points in the right half-plane are attracted
to (1, 0); i.e., these sets form the basins of attraction of the two attractors. (See
Chapter 3 for a more complete treatment of basins of attraction.) The stable
manifold of the saddle forms the boundary between the two basins. Focusing
here on the local behavior around the saddle fixed-point (0, 0), we calculate the
eigenvalues of Df(0, 0) as s ⫽ 1 2andu ⫽ 4
, with corresponding eigenvectors
V
s
⫽ (0, 1) and V
u
⫽ (1, 0), respectively. Thus the unstable and stable manifolds
emanate from (0, 0) in the directions of these vectors.
403
S TA B LE M ANIFOLDS AND C RISES
x
y
(1,0)(-1,0)
Figure 10.4 Action of the orbits for the map f(
x, y
) ⴝ ((4
)arctan
x, y
2)
.
The points (⫺1, 0) and (1, 0) are fixed-point sinks, while the origin is a saddle.
The stable manifold of (0, 0) is the y-axis. The unstable manifold is the set 兵(x, 0) :
⫺1 ⬍ x ⬍ 1其.
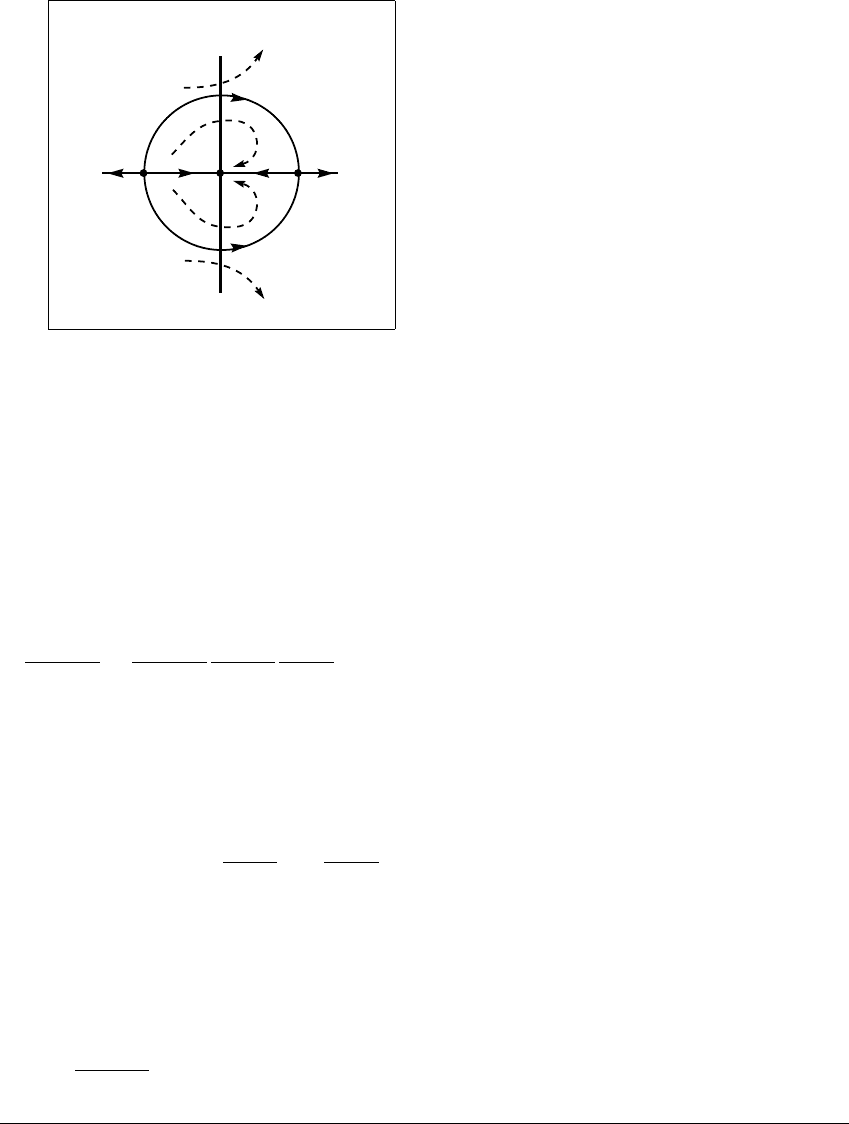
E XAMPLE 10.3
Let f(r,
) ⫽ (r
2
,
⫺ sin
), where (r,
) are polar coordinates in the plane.
There are three fixed points: the origin and (r,
) ⫽ (1, 0) and (1,
). See Figure
10.5. The origin is a sink, attracting all points in the interior of the unit disk since
r → r
2
. There are two ways to compute the eigenvalues away from the origin.
One is to work in polar coordinates. Then
Df(r,
) ⫽
2r 0
01⫺ cos
,
for r ⬎ 0. The eigenvalues of each of the two fixed points with r ⬎ 0 are easily
read from this diagonal matrix. The other way is to compute the eigenvalues in
rectangular coordinates. Since eigenvalues are independent of coordinates, the
results are the same. Checking the stability of the other two points in rectangular
coordinates allows us to review the chain rule for two variables.
The conversion between xy-coordinates and polar coordinates is x ⫽
r cos
,y⫽ r sin
.Themapf in terms of xy-coordinates is given by
F(x, y) ⫽
F
1
F
2
⫽
f
1
cos f
2
f
1
sin f
2
,
404
10.1 THE S TABL E M ANIFOLD T HEOREM
x
y
(-1,0)
(1,0)
Figure 10.5 Action of orbits for the map f(
r,
) ⴝ (
r
2
,
ⴚ sin
)
.
Here (r,
) are polar coordinates in the plane. In rectangular (x, y) coordinates, the
fixed point (0, 0) is a sink; (⫺1, 0) is a source; and (1, 0) is a saddle. The stable
manifold of (1, 0) is the unit circle minus the fixed point (⫺1, 0). The unstable
manifold of (1, 0) is the positive x-axis.
where f
1
(r,
) ⫽ r
2
,f
2
(r,
) ⫽
⫺ sin
. The Jacobian of F with respect to rect-
angular coordinates is given by the chain rule:
(F
1
,F
2
)
(x, y)
⫽
(F
1
,F
2
)
(f
1
,f
2
)
(f
1
,f
2
)
(r,
)
(r,
)
(x, y)
⫽
cos f
2
⫺f
1
sin f
2
sin f
2
f
1
cos f
2
2r 0
01⫺ cos
cos
⫺r sin
sin
r cos
⫺1
where we use the fact that the matrices of partial derivatives satisfy
(r,
)
(x, y)
⫽
(x, y)
(r,
)
⫺1
.
Now we can evaluate the rectangular coordinate Jacobian at the fixed points
without actually converting the map to rectangular coordinates, which would be
quite a bit more complicated. At (r,
) ⫽ (1, 0), or equivalently (x, y) ⫽ (1, 0),
we have
(F
1
,F
2
)
(x, y)
(1, 0) ⫽
10
01
20
00
10
01
⫺1
⫽
20
00
.
405
S TA B LE M ANIFOLDS AND C RISES
Thus D
x
f(1, 0) has eigenvalues s ⫽ 0andu ⫽ 2, with corresponding eigenvectors
V
s
⫽ (0, 1) and V
u
⫽ (1, 0). The stable manifold of this fixed-point saddle is
given by the formula r ⫽ 1, ⫺
⬍
⬍
. The unstable manifold is given by
r ⬎ 0,
⫽ 0.
✎ E XERCISE T10.1
Repeat the computations of Example 10.3 for the other fixed point (r,
) ⫽
(1,
), or (x, y ) ⫽ (⫺1, 0).
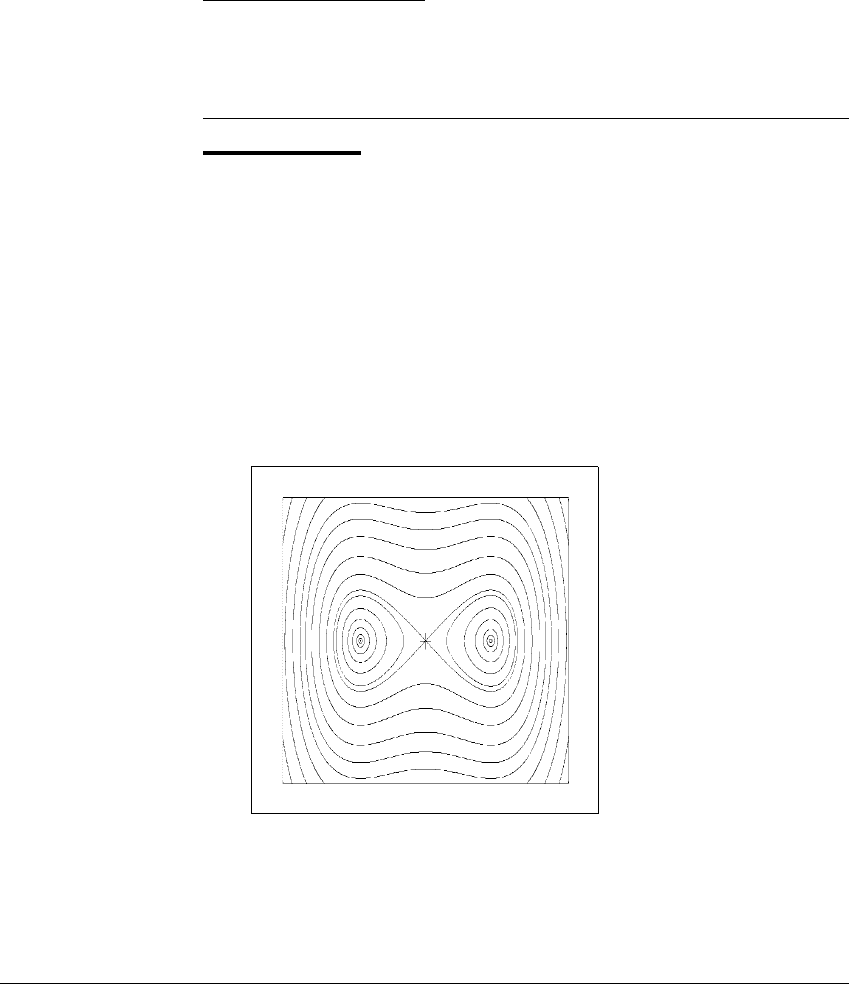
E XAMPLE 10.4
The phase plane of the double-well Duffing equation
¨
x ⫺ x ⫹ x
3
⫽ 0 (10.1)
is shown in Figure 10.6. This equation was introduced in Chapter 7. Here we in-
vestigate the stable and unstable manifolds under a time-T map. The equilibrium
(0, 0) of (10.1) is a saddle with eigenvectors V
u
⫽ (1, 1) and V
s
⫽ (1, ⫺1). These
vectors are tangent to a connecting arc as it emanates from the equilibrium and
then returns to it. Under the time-T map F
T
, all forward and backward iterates
Figure 10.6 Phase plane of the undamped Duffing equation.
The phase plane of the two-well Duffing equation
¨
x ⫺ x ⫹ x
3
⫽ 0 is shown. The
equilibrium 0 (marked with a cross) is a fixed point saddle of the time-T map. The
origin, together with the connecting arcs, form both the stable and the unstable
manifolds of 0 under the time-T map.
406
10.1 THE S TABL E M ANIFOLD T HEOREM
of initial conditions on a connecting arc remain on the arc. The origin is a fixed
point saddle of F
T
, and the origin, together with the two connecting arcs, are
both the stable manifold and the unstable manifold of 0 under F
T
.
Although the previous examples illustrated the Stable Manifold Theorem,
we didn’t really use the theorem, since the stable and unstable manifolds could
be explicitly determined. (Recall that solution curves of the Duffing phase plane
are level curves of the potential P(x) ⫽ x
4
4 ⫺ x
2
2.) We end this section with
aH
´
enon map, an example in which the stable and unstable manifolds must be
approximated numerically. We outline the method used in all the numerically
calculated manifolds pictured in this book. The approximation begins by moving
in the direction of an eigenvector, as the theorem indicates.
E XAMPLE 10.5
Let f(x, y) ⫽ (2.12 ⫺ x
2
⫺ .3y, x), one of the H
´
enon family of maps. Figure
10.7 shows stable and unstable manifolds of a fixed-point saddle p ⬇ (.94,.94).
The eigenvalues of Df(p)ares ⬇ ⫺0.18 and u ⬇ ⫺1.71. The corresponding
eigenvectors are V
s
⬇ (1, ⫺5.71) and V
u
⬇ (1, ⫺.58). We describe a practical
method for approximating
U(p); S(p) can be approximated using the same algo-
rithm and f
⫺1
. First, find (as we have done) an eigenvector V
u
associated with the
eigenvalue u. Choose a point a on the line through V
u
so that a and b ⫽ f(a)are
within 10
⫺6
of p. (If u happens to be negative, which is the case above, replace f
with f
2
here and throughout this discussion.)
If we assume that the unstable manifold is given locally as a quadratic
function of points on V
u
, then since |a ⫺ p| ⬍ 10
⫺6
, the distance of b ⫽ f(a)
from
U(p) is on the order of 10
⫺12
. See Figure 10.8. There might be extreme cases
where the distances 10
⫺6
and 10
⫺12
are too large, but such cases are very rare in
practice. Then apply f to the line segment ab ⫽ J. This involves choosing a grid
of points a ⫽ a
0
,a
1
,...,a
n
⫽ b along the segment J. Let b
1
⫽ f(a
1
). The rule
used here is that the distance |b
1
⫺ b| should be less than 10
⫺3
. Otherwise, move
a
1
closer to a. Repeat this procedure when choosing each grid point. (Continue
with b
2
so that |b
1
⫺ b
2
| ⱕ 10
⫺3
, and so on.)
Using this method, calculate f, f
2
,...,f
n
of segment J. (Plot f(J) after it is
computed, then ignore the computation of f(J) when computing f
2
(J), etc.) At
some points, the computed value of f
n
(q) may be far from the actual value, due
to sensitive dependence. To avoid this problem, make sure that Df
n
(q)isnottoo
large. Plot only points q where each of the four entries in Df
n
(q)islessthan10
8
.
This will ensure that the error in f
n
(q), the distance to U(p), is on the order
of at most 10
⫺4
, assuming that f can be computed with an error of much less
407
S TA B LE M ANIFOLDS AND C RISES
2.5
−
2.5
−
2.5 2.5
Figure 10.7 Stable and unstable manifolds for a fixed point saddle of the
H
´
enon map f(
x, y
) ⴝ (2
.
12 ⴚ
x
2
ⴚ
.
3
y, x
)
.
The fixed point is marked with a cross. The unstable manifold is S-shaped; the stable
manifold is primarily vertical.
a
f(a)
p
10
-6
10
-12
U(p)
V
u
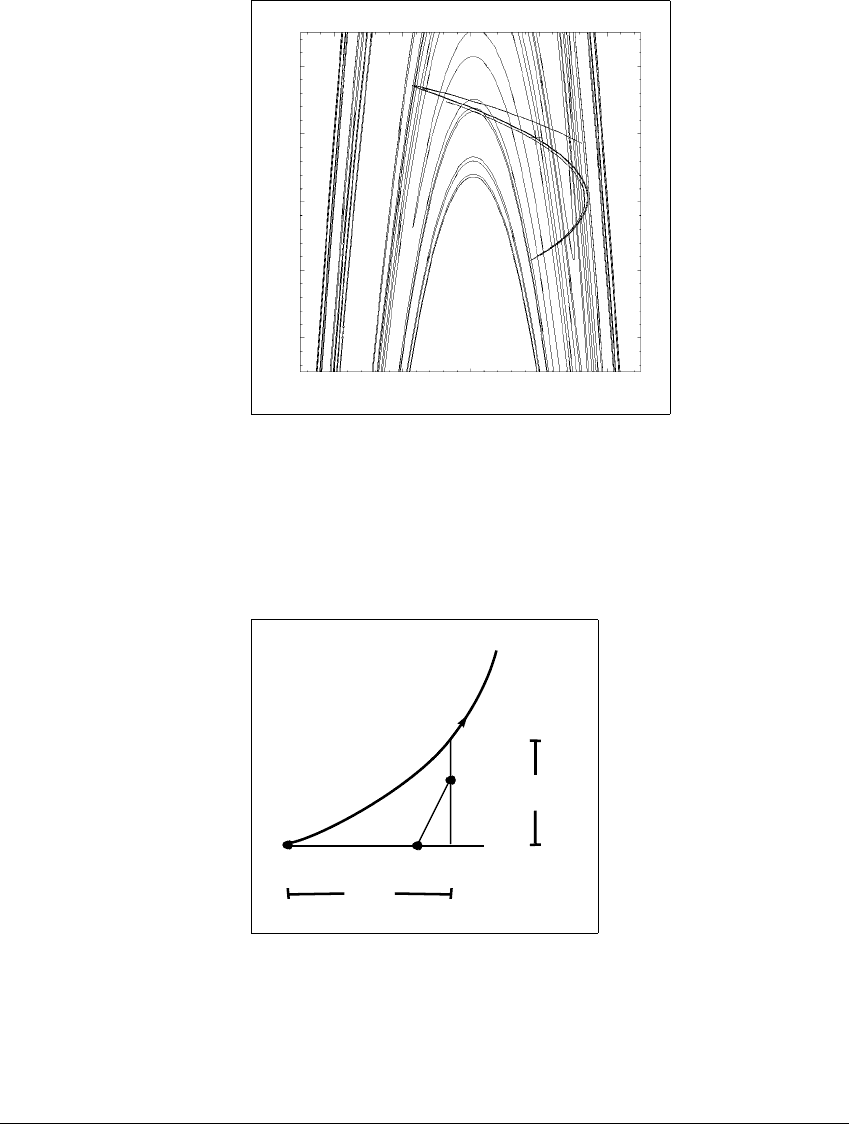
Figure 10.8 Calculating an unstable manifold.
Select a point a along an eigenvector V
u
so that a and f(a) are within 10
⫺6
of
the saddle p. Assuming that the unstable manifold is given locally as a quadratic
function of points on V
u
, then the distance of f(a)fromU(p) is on the order of
at most 10
⫺12
. Figure 10.7 and Color Plates 24–25 were created using the method
described in this section.
408