Alligood K., Sauer T., Yorke J.A. Chaos: An Introduction to Dynamical Systems
Подождите немного. Документ загружается.


C HAOS IN D IFFERENTIAL E QUATIONS
Equation (9.8) describes motion under a potential energy field which has minima
at x ⫽⫺1andx ⫽ 1. We can think of a ball rolling up and down the potential
wells of Figure 7.15(b). To model a ball that slowly loses energy because of friction,
we add a damping term:
¨
x ⫹ c
˙
x ⫺ x ⫹ x
3
⫽ 0. (9.9)
Most orbits of (9.9) end up in one or the other of the wells, no matter how much
energy the system begins with.
Both (9.8) and (9.9) are autonomous two-dimensional first-order systems
in the variables x and
˙
x, and as such their solution behavior falls under the
enforcement of the Poincar
´
e-Bendixson Theorem. For (9.8), most solutions are
periodic, either confined to one well or rolling through both, depending on the
(constant) energy of the system. They are periodic orbits, which falls under case 2
of Theorem 8.8. If the system has total energy equal to 0, the peak between the two
wells in Figure 7.15(b), solutions will end up approaching the peak infinitesimally
slowly (reaching the peak in “infinite time”). The
-limit set of these orbits is the
unstable equilibrium at the peak; this falls under case 1 of Theorem 8.8. For (9.9), a
solution can never reach a previous (x,
˙
x) position because it would have the same
energy; but the energy is decreasing, as shown in Chapter 7. Therefore periodic
orbits are impossible, and each orbit converges to one of the three equilibrium
points, either the peak or one of the two well bottoms.
The forced damped double-well Duffing equation
¨
x ⫹ c
˙
x ⫺ x ⫹ x
3
⫽
sin t (9.10)
is capable of sustained chaotic motion. As a system in the two variables x and
˙
x, it is nonautonomous; the derivative of y ⫽
˙
x involves time. The usual trick is
to declare time as a third variable, yielding the autonomous three-dimensional
system
˙
x ⫽ y
˙
y ⫽⫺cy ⫹ x ⫺ x
3
⫹
sin t
˙
t ⫽ 1 (9.11)
Solutions of (9.10) are not bound by the Poincar
´
e-Bendixson Theorem.
The physical interpretation of the forced damped double-well Duffing equa-
tion is fairly clear. The system, because of damping, is trying to settle in one of the
energy minima at the the bottom of the wells; due to the sinusoidal buffetting by
the forcing function, it cannot settle down. The bronze ribbon of Lab Visit 5 is a
378

9.6 LYAP U N OV E XPONENTS IN F LOWS
mechanical device that follows this behavior in a qualitative way. In the absence
of forcing, the magnet on the end of the ribbon will be trapped by one or the other
of the permanent magnets as it loses energy due to friction. When an alternating
magnetic field is set up by turning on the coil, the ribbon oscillates aperiodically
for the duration of the experiment. The plot of (x,
˙
x) in Lab Visit 5 is the time-2
map of the experiment. It looks qualitatively similar to the time-2
map of (9.10),
which is shown in Figure 9.11. Here we have set the forcing amplitude
⫽ 3and
investigated two different settings for the damping parameter.
➮ COMPUTER EXPERIMENT 9.2
The attractors plotted in Figure 9.11 are sensitive to moderate-sized changes
in the parameters. Change the damping parameter c to 0.01 or 0.05 and explore
the attracting periodic behavior that results. Show parametric plots of the periodic
orbits in (x,
˙
x) space as well as plots of the attractor of the time-2
maps.
➮ COMPUTER EXPERIMENT 9.3
Plot orbits of the forced Van der Pol equation
¨
x ⫹ c(x
2
⫺ 1)
˙
x ⫹ x
3
⫽
sin t.
Set parameters c ⫽ 0.1,
⫽ 5 and use initial value (x,
˙
x) ⫽ (0, 0) to plot an
attracting periodic orbit. What is its period? Repeat for
⫽ 7; what is the new
period? Next find out what lies in between at
⫽ 6. Plot the time-2
map.
9.6 LYAPUNOV EXPONENTS IN FLOWS
In this section, we extend the definition of Lyapunov exponents for maps, intro-
duced in Chapter 3, to the case of flows. A chaotic orbit can then be defined to
be a bounded aperiodic orbit that has at least one positive Lyapunov exponent.
First recall the concept of Lyapunov exponents for maps. The local behavior
of the dynamics varies among the many directions in state space. Nearby initial
conditions may be moving apart along one axis, and moving together along an-
other. For a given point, we imagined a sphere of initial conditions of infinitesimal
radius evolving into an ellipse as the map is iterated. The average growth rate (per
iteration) of the longest orthogonal axis of the ellipse was defined to be the first
379
C HAOS IN D IFFERENTIAL E QUATIONS
5
˙
x
⫺2
⫺2 x 2
(a)
5
˙
x
⫺2
⫺2 x 2
(b)
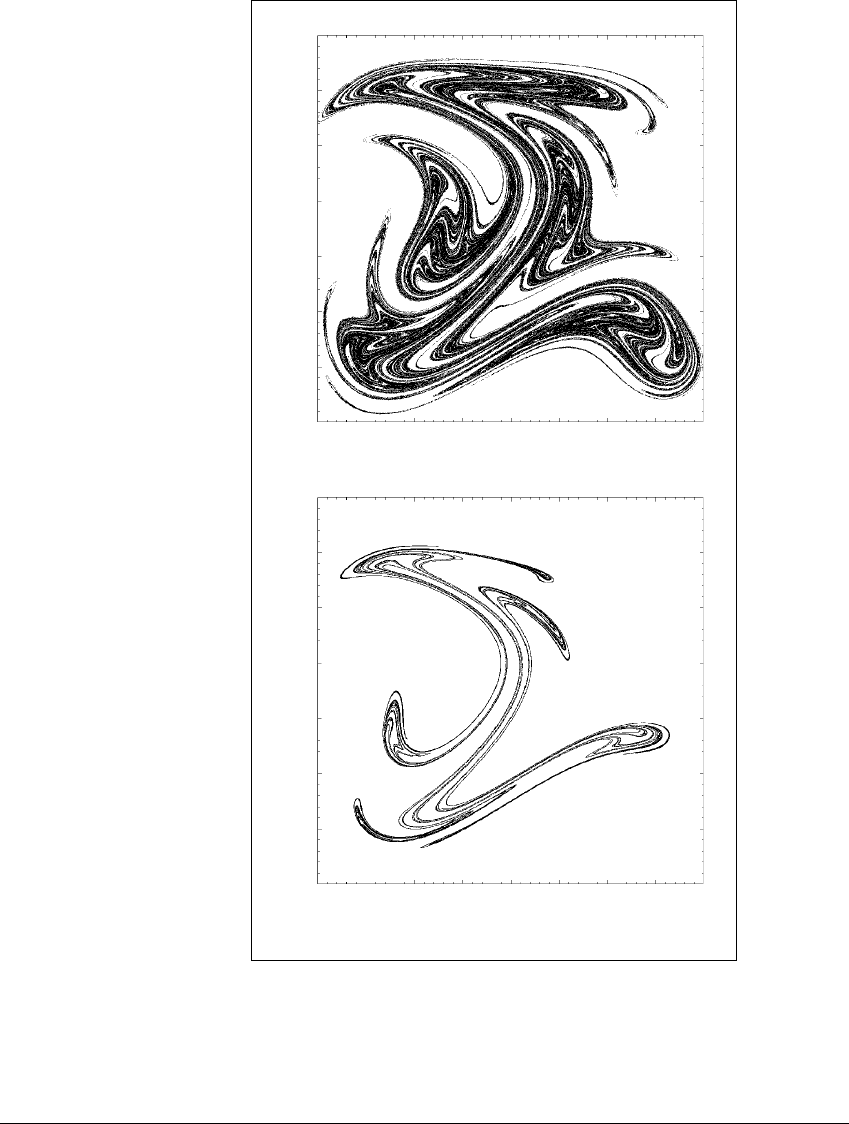
Figure 9.11 Time-2
map of the forced damped double-well Duffing equation.
(a) The variables (x,
˙
x) of (9.10) with c ⫽ 0.02,
⫽ 3 are plotted each 2
time units.
One million points are shown. (b) Same as (a), but c ⫽ 0.1. Compare with Figure
5.24, which was measured from experiment with a qualitatively similar system.
380
9.6 LYAP U N OV E XPONENTS IN F LOWS
Lyapunov number of the orbit, and its natural logarithm was called the Lyapunov
exponent. A positive Lyapunov exponent signifies growth along that direction,
and therefore exponential divergence of nearby trajectories. The existence of a
local expanding direction along an orbit is the hallmark of a chaotic orbit.
For flows, the concept is the same, once we replace the discrete iterations of
the map with the continuous flow of a differential equation. Recall the definition
of the time-T map of a flow F
T
(v). The flow F
T
(v) is defined to be the point at
which the orbit with initial condition v arrives after T time units.
Let
˙v ⫽ f(v) (9.12)
beasystemofn autonomous differential equations in v ⫽ (v
1
,...,v
n
). We define
the Lyapunov exponent of a flow as the Lyapunov exponent of its time-T map for
T ⫽ 1.
Definition 9.2 The Lyapunov numbers (respectively, exponents)ofthe
flow F
T
(v) are defined to be the Lyapunov numbers (respectively, exponents) of
the associated time-1 map.
It is straightforward to define the time-T map F
T
, and to define the Lyapunov
numbers and exponents of a flow, by simply falling back on our previous definitions
in the map case. We begin with a tiny sphere of initial conditions around some
v
0
, and imagine the evolution of the sphere as the initial conditions follow the
flow of the differential equation. The only problem arises if you want to actually
determine the Lyapunov numbers and exponents. To do so, you will need to know
F
T
(v)
v
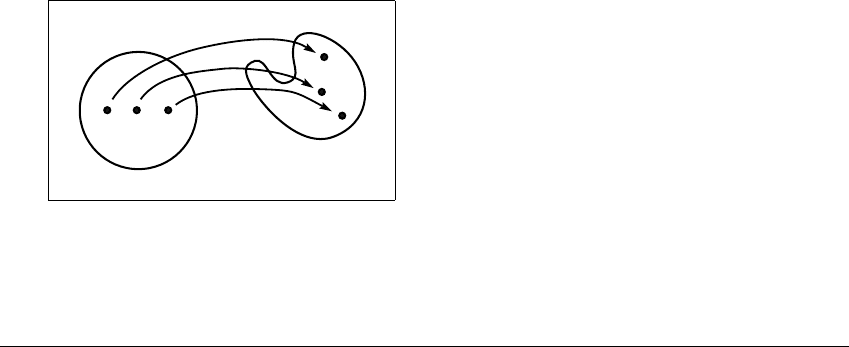
Figure 9.12 The time-T map
F
T
of a flow.
A ball of initial conditions are followed from time t ⫽ 0totimet ⫽ T. The image
of the point v under F
T
is the position of the solution at time T of the initial value
problem with v
0
⫽ v.
381

C HAOS IN D IFFERENTIAL E QUATIONS
DF
1
(v), the derivative of the the time-1 map F
1
(v) with respect to the initial
value v.
If we fix T for the moment, DF
T
(v) is a linear map on ⺢
n
, represented by
an n ⫻ n matrix. Intuitively, the vector DF
T
(v)(w) is the small variation in the
solution of (9.12) at time T caused by a small change in the initial value at t ⫽ 0
from v to v ⫹ w.
Although there is no explicit formula for the matrix DF
T
(v), we can find a
differential equation involving it that can be solved in parallel with (9.12). Since
兵F
t
(v):t in ⺢其 is the solution of (9.12) with initial value v,wehavebydefinition
d
dt
F
t
(v) ⫽ f(F
t
(v)). (9.13)
This equation has two variables, time t and the initial value v in ⺢
n
. Differentiating
with respect to v, the chain rule yields
d
dt
DF
t
(v) ⫽ Df(F
t
(v)) ⭈ DF
t
(v), (9.14)
which is known as the variational equation of the differential equation. The
name comes from the fact that if we could solve the equation for DF
t
(v), we
would know the derivative matrix of F
t
, and therefore know how F
t
acts under
small variations in the initial value v.
To simplify the looks of the variational equation, define
J
t
⫽ DF
t
(v)
to be the Jacobian of the time-t map evaluated at initial value v,and
A(t) ⫽ Df(F
t
(v))
to be the matrix of partial derivatives of the right-hand side f of the differential
equation (9.12) evaluated along the solution. Note that A(t) can be computed
explicitly from knowledge of the original differential equation. Then we can
rewrite the variational equation (9.14) as
˙
J
t
⫽ A(t)J
t
. (9.15)
In writing (9.14) this way, we have fixed v, the initial value of the orbit under
consideration, and so have not explicitly written it into (9.15). In order to
uniquely define J
t
from (9.15), we need to add an initial condition, which is J
0
⫽ I,
the identity matrix. This follows from the fact that the flow satisfies F
0
(v) ⫽ v by
definition. The variational equation (9.15) is a linear differential equation, even
382
9.6 LYAP U N OV E XPONENTS IN F LOWS
when the original differential equation has nonlinear terms. Unlike the original
equation (9.12), it is not autonomous, since A(t) is time-dependent in general.
E XAMPLE 9.3
In order to calculate the output of the time-T map F
T
(v) for the Lorenz
equations, it suffices to solve the equations with initial condition v
0
⫽ (x
0
,y
0
,z
0
)
and to follow the trajectory to time T;then
F
T
(x
0
,y
0
,z
0
) ⫽ (x(T),y(T),z(T)).
Next we show how to calculate the 3 ⫻ 3 Jacobian matrix J
T
of the three-
dimensional map F
T
. Differentiating the right-hand-side of the Lorenz equations
(9.1) yields
A(t) ⫽
⫺
0
r ⫺ z(t) ⫺1 ⫺x(t)
y(t) x(t) ⫺b
. (9.16)
Each column of J
T
can be calculated individually from the variational equation
(9.15). For example, the first column of J
T
is the solution of the differential
equation
˙
J
11
(t)
˙
J
21
(t)
˙
J
31
(t)
⫽ A(t)
J
11
(t)
J
21
(t)
J
31
(t)
(9.17)
at time T, and the other two columns satisfy a similar equation. Notice that the
current A(t) needs to be available, which involves the current (x(t),y(t),z(t)).
So the variational equation must be solved simultaneously with a solution of the
original differential equation (9.12).
An important fact about the Jacobian matrix J
T
⫽ DF
T
(v)ofthetime-T
map evaluated at v is that it maps small variations tangent to the orbit at time 0
to small variations tangent to the orbit at time T. More precisely,
DF
T
(v) ⭈ f(v) ⫽ f(F
T
(v)). (9.18)
As usual, v denotes the initial value of the flow at time 0, and F
T
(v) the value at
time T.Sincef is the right-hand-side of the differential equation, it defines the
direction of the orbit at each time.
383
C HAOS IN D IFFERENTIAL E QUATIONS
The derivation of this fact follows from applying the variational equation
(9.14) to the vector f(v):
d
dt
DF
t
(v)f(v) ⫽ Df(F
t
(v)) ⭈ DF
t
(v)f(v). (9.19)
Setting w ⫽ DF
t
(v)f(v), we see that w(t) satisfies the initial value problem
˙w ⫽ Df(F
t
(v))w
w(0) ⫽ f(v). (9.20)
On the other hand, differentiating the original equation (9.13) with respect to t
yields
d
2
dt
2
F
t
(v) ⫽ Df(F
t
(v))
d
dt
F
t
(v)
d
dt
f(F
t
(v)) ⫽ Df(F
t
(v))f(F
t
(v)), (9.21)
and f(F
t
(v)) equals f(v) at time 0. Since w and f(F
t
(v)) satisfy the same initial
value problem, they are equal.
The important consequence of (9.18) is that a bounded orbit of an au-
tonomous flow (9.12) either has one Lyapunov exponent equal to zero, or
else it has an equilibrium in its
-limit set. If the latter does not occur, then
0 ⬍ b ⬍ |f(F
t
(v))| ⬍ B for all t, for some positive bounds b and B.Ifr(n)isthe
expansion in the direction of f(v)aftern time units (n steps of the time-1 map),
then
0 ⱕ lim
n→
⬁
1
n
ln b ⱕ lim
n→
⬁
1
n
ln r(n) ⱕ lim
n→
⬁
1
n
ln(B) ⱕ 0.
Therefore the Lyapunov exponent in the direction tangent to the orbit is zero.
The change in volume due to the flow can be found with the help of
a famous formula due to Liouville. Define ⌬(t) ⫽ det J
t
where
˙
J
t
⫽ A(t)J
t
as in
(9.15). Liouville’s Formula (Hartman, 1964) says that ⌬(t) satisfies the differential
equation and initial condition
⌬
t
⫽ Tr( A(t))⌬
t
⌬
0
⫽ det J
0
⫽ 1, (9.22)
where Tr denotes the trace of the matrix A(t). It follows directly from (9.22) that
det J
t
⫽ exp
t
0
Tr A(t) dt
. (9.23)
384
9.6 LYAP U N OV E XPONENTS IN F LOWS
Definition 9.4 A system of differential equations is dissipative if its time-
T map decreases volume for all T ⬎ 0.
Note that Tr(A(t)) ⬍ 0 for all t implies that the system is dissipative. For
the Lorenz equations, Tr A(t) ⫽⫺(
⫹ 1 ⫹ b), so that
det J
t
⫽ e
⫺(
⫹1⫹b)t
.
The volume decrease is constant for all v. In one time unit, a ball of initial
conditions decreases in volume by a factor of e
⫺(
⫹1⫹b)
. For the standard Lorenz
parameters
⫽ 10 and b ⫽ 8 3, this factor is 0.00000116 per second, so it is a
dissipative system.
E XAMPLE 9.5
(Forced damped pendulum.) Liouville’s formula can also be used to find
the area contraction rate for the time-2
map of the forced damped pendulum,
a dissipative system introduced in Chapter 2. First, write the equation
¨
x ⫹ c
˙
x ⫹
sin x ⫽ b cos t in the form of a first-order system:
˙
x ⫽ y
˙
y ⫽⫺cy ⫺ sin x ⫹ b cos t
˙
t ⫽ 1. (9.24)
Then
A(t) ⫽
010
⫺ cos x ⫺c ⫺b sin t
000
. (9.25)
Equation (9.23) shows us that the area contraction rate per iteration of the
time-2
map is
exp
2
0
Tr A(t) dt
⫽ exp
2
0
⫺cdt
⫽ e
⫺2
c
. (9.26)
With the definition of Lyapunov exponent in hand, we can go on and define
chaotic orbit in a straightforward way.
Definition 9.6 Let F
t
(v
0
) be a solution of ˙v ⫽ f(v), where v
0
僆 ⺢
n
. We
say the orbit F
t
(v
0
)ischaotic if the following conditions hold:
385

C HAOS IN D IFFERENTIAL E QUATIONS
1. F
t
(v
0
),tⱖ 0, is bounded;
2. F
t
(v
0
) has at least one positive Lyapunov exponent; and
3.
(v
0
) is not periodic and does not consist solely of equilibrium points,
or solely of equilibrium points and connecting arcs (as in the conclusion
of the Poincar
´
e–Bendixson Theorem).
In order to be precise, one might also rule out higher-dimensional
-limit
sets on which the map exhibits some sort of patterned behavior, such as the
example of the irrational flow on the torus in Chapter 8. If the torus itself is
repelling in ⺢
3
, then a well-behaved dense orbit on the torus can have a positive
Lyapunov exponent, but we would not want to consider it a chaotic orbit.
386

C HALLENGE 9
☞ C HALLENGE 9
Synchronization of Chaotic Orbits
A
SURPRISING FACT about chaotic attractors is their susceptibility to syn-
chronization. This refers to the tendency of two or more systems which are coupled
together to undergo closely related motions, even when the motions are chaotic.
There are many types of synchronization, depending on whether the mo-
tions are identical or just related in some patterned way. Synchronization can be
local, meaning that the synchronized state is stable, and that once synchronized,
small perturbations will not desynchronize the systems; or global, meaning that
no matter where the systems are started in relation to one another, they will
synchronize. There are also different ways to couple the systems. Coupling can be
one-way, in which outputs from one system affect the second system but not vice
versa, or two-way, in which each affects the other.
In Challenge 9, you will first establish a theorem that explains local syn-
chronization for two-way coupled identical nonlinear systems. It states that if
the coupling is strong enough, then identical systems which are started close
enough together will stay close forever. Secondly, there is an example of global
synchronization for one-way coupling, in which two identical Lorenz systems,
started with arbitrary different initial conditions, will synchronize exactly: their
(x, y, z) states are eventually (asymptotically) equal as a function of time. Both
of these behaviors are different from the behavior of identical uncoupled (that is,
independent) chaotic systems. If the latter are started with approximately equal
but nonidentical initial conditions, we know that sensitive dependence will cause
the two systems to eventually move far apart.
Here is synchronization in its simplest form. Consider the two-way coupled
system of autonomous differential equations
˙
x ⫽ ax ⫹ c(y ⫺ x)
˙
y ⫽ ay ⫹ c(x ⫺ y). (9.27)
Assume that a ⬎ 0. We consider the original identical systems to be
˙
x ⫽ ax and
˙
y ⫽ ay. The coupling coefficient c measures how much of x to replace with y in
the x-equation, and the reverse in the y-equation. First notice that if the coupling
is turned off, there is no synchronization. The solutions for c ⫽ 0arex(t) ⫽ x
0
e
at
and y(t) ⫽ y
0
e
at
, and the difference between them is |x(t) ⫺ y(t)| ⫽ |x
0
⫺ y
0
|e
at
,
which increases as a function of time because of our assumption a ⬎ 0. In this
387