Анищенко В.С. Нелинейные эффекты в хаотических и стохастических системах
Подождите немного. Документ загружается.

D
opt
a
D
opt
∝ ε
ε ˙x = x − x
3
− y , ˙y = γx − y + b,
x
y
ε
ε ¨x = (1 − ε − 3 x
2
) ˙x + (1 − γ) x − x
3
− b.
b γ
(γ −
1)
3
/27 + b
2
/4 > 0
4εγ > (ε + 1 − 3x
2
0
)
x
0

x
y
x x
x
x
y
y
+
*
−
+ −
*
+
−
x
b
fix
J
J
rl
lr
l
l
1
2
J
l
, J
r
, J
rl
J
lr
l
1
l
2
3x
2
0
+ε −1
x y
x P
max
= (x
+
, y
+
)
P
min
= (x
−
, y
−
) y
P
max
P
min
γ b
x
fix
, y
fix
ε 1/γ
x
y < y
−
y
s
ε ˙x = x − x
3
− y + s , ˙y = γx − y + b +
√
2D ξ(t).
s = 0
b
y → y − s s
b → b − s

0 5 10 15
t
−1.5
−0.5
0.5
1.5
x(t)
0 5 10 15
t
−1.5
−0.5
0.5
1.5
−2 −1 1 2
x
−1.2
−0.2
0.8
y
−2 −1 1 2
x
−1.2
−0.2
0.8
y
γ = b = 1.5, D = 0.3
ε = 10
−1
ε = 10
−4
D 6=
0
(x
−
, y
−
)
r = lim
T →∞
N
T
.
hT i = lim
N→∞
1
N
N
X
i=1
T
i
,
T
i
i (i + 1)
r = lim
N→∞
T
0
N
+
1
N
N
X
i=1
T
i
+
T
N+1
N
−1
=
1
hT i
,
T
0
T
N+1
s
b b
s
s
λ =
dr
ds
= −
dr
db
.
R =
p
hT
2
i − hT i
2
hT i
.
R R < 1
R
R < 1

P (x, y)
∂
t
P = −
1
ε
∂
x
(x − x
3
− y)P + ∂
y
(y − γx − b + D∂
y
)P,
ρ(x) =
+∞
Z
−∞
dyP (x, y) , p(y) =
+∞
Z
−∞
dxP (x, y),
∆t
ε
ε = 10
−4
ε → 0
p(y), ρ(x), r, dr/db, T R
y
γ x(t) − b
x(y)
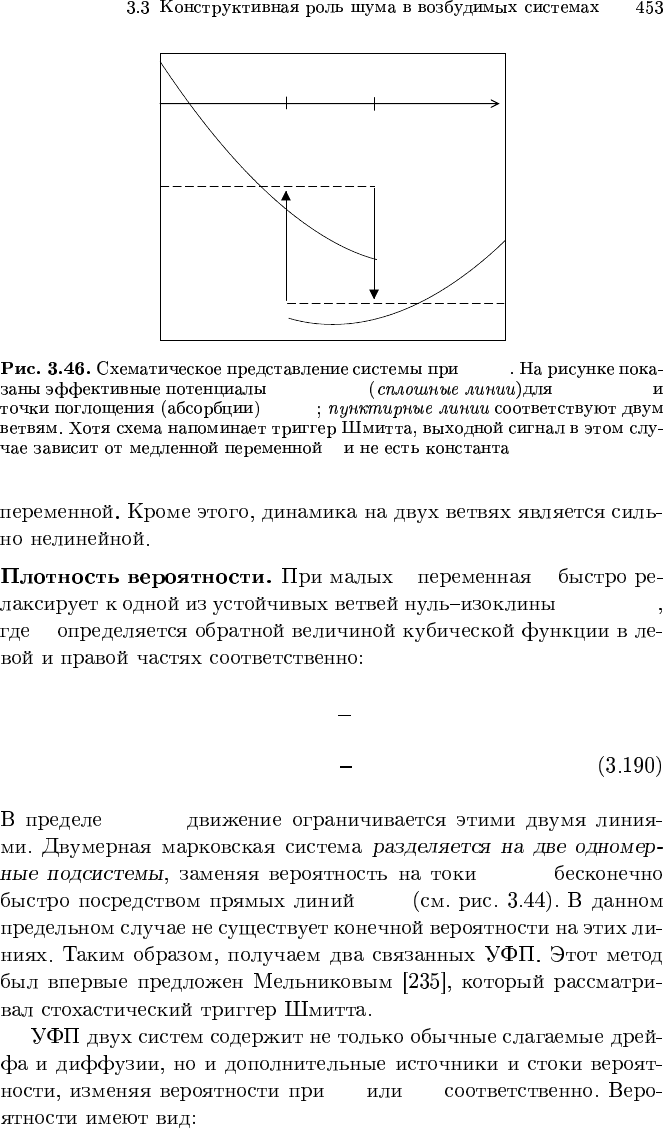
y
y
y
−
left branch
right branch
U
U
r
l
+
ε → 0
U
l
(y), U
r
(y) γ = b = 1.5
y
+
, y
−
y
ε x
y = x−x
3
x
x
l
(y) = 3y
−
cos
1
3
arccos(y/y
+
)
,
x
r
(y) = 3y
+
cos
1
3
arccos(y/y
−
)
.
ε → 0
J
rl
, J
lr
l
1
, l
2
y
+
y
−
∂
t
P
l
(y) = ∂
y
(y − b − γx
l
(y) + D∂
y
)P
l
+ J
rl
δ(y −y
+
)
∂
t
P
r
(y) = ∂
y
(y − b − γx
r
(y) + D∂
y
)P
r
+ J
lr
δ(y −y
−
).
P
min
P
max
J
lr
= D∂
y
P
l
(y), J
rl
= −D∂
y
P
r
(y),
y → ±∞
∞
Z
y
−
P
l
(y)dy +
y
+
Z
−∞
P
r
(y)dy = 1.
J
lr
= J
rl
= r.
P
l
(y) =
r
D
exp (−U
l
(y)/D)
y
Z
y
−
dz exp (U
l
(z)/D) · Θ(y
+
− z),
P
r
(y) =
r
D
exp (−U
r
(y)/D)
y
+
Z
y
dz exp (U
r
(z)/D) · Θ(z − y
−
),
U
l
(y), U
r
(y)
U
l
(y) =
(y −b)
2
2
− γ
x
l
(y)
4
[3y −x
l
(y)],
U
r
(y) =
(y −b)
2
2
− γ
x
rmr
(y)
4
[3y −x
r
(y)].
−1.5 −0.5 0.5 1.5
x
10
−5
10
−3
10
−1
10
1
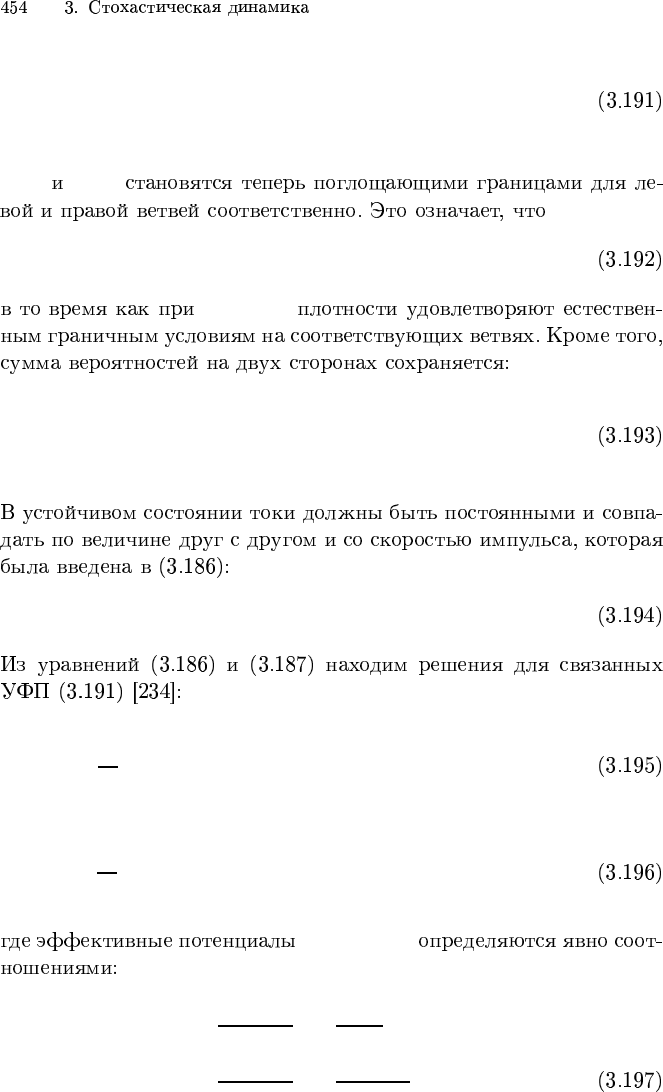
ρ
ρ(x)
ε D = 0.1, γ =
1.5, b = 1.5
ε = 10
−3
ε = 10
−5
◦
ρ(x) ρ(x) = p(y)
dy
dx
x
min
x
max
ε
ε
r = D
y
+
Z
y
−
du
∞
Z
u
dv exp
U
l
(u) − U
l
(v)
D
+
+
y
+
Z
y
−
du
u
Z
−∞
dv exp
U
r
(u) − U
r
(v)
D
−1
.
D
r ≈ U
00
l
(y
fix
)
r
∆U
l
πD
exp
−
∆U
l
D
, D ∆U
l
.