Baumgarte T., Shapiro S. Numerical Relativity. Solving Einstein’s Equations on the Computer
Подождите немного. Документ загружается.

17.2 Dynamical simulations 591
100
10
−23
10
−22
10
−21
10
−23
10
−22
10
−21
BHNS: NR+2.5PN
BHNS: NR
BHBS
Advanced LIGO
10
−23
10
−22
10
−21
Case E
Case A
Case D
1000
f
GW
[Hz]
h
eff
[D = 100Mpc]
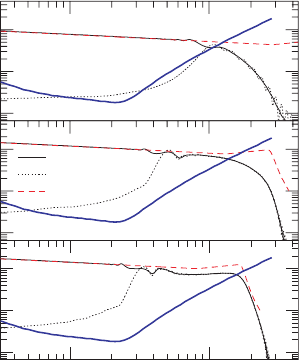
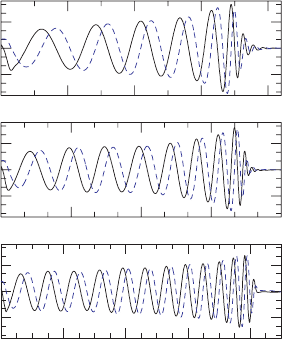
Figure 17.12 Gravitational wave power spectra for the q = 1, 3, and 5 cases (cases E, A, and D, respectively).
The solid curve in each panel shows the combined waveform found by attaching the restricted 2.5 order PN
waveform to the dominant modes computed by the numerical relativity simulation (NR), while the dotted curve
shows the contribution from the latter alone. The dashed curve shows the power spectrum for a nonspinning
black hole binary merger (BHBH) for black holes with the same mass ratios as the black hole–neutron star
binaries (BHNS); the later exhibit significantly less power at higher frequencies, due to tidal disruption. The
heavier solid curve is the effective strain of the Advanced LIGO detector, defined by h
LIGO
( f )(seetext).Toset
physical units, we assume a neutron star rest mass of M
0
= 1.4M
and a source distance of D = 100 Mpc.
[From Etienne et al. (2009).]
star is assumed to have a rest-mass of 1.4M
and the binary is placed at a distance of
100 Mpc. This is the distance required to reach one merger per year in one estimate,
47
assuming an overall rate of 10 mergers per Myr per Milky Way-equivalent galaxy (and
a density of these of 0.1 gal/Mpc
3
). This distance is roughly that of the Coma cluster,
and approximately five times the distance to the Virgo cluster. The gravitational wave
spectra of nonspinning binary black hole mergers with the same mass ratios as in the
three black hole–neutron star cases are also plotted for comparison. The figure shows
that the wave signal drops appreciably near the frequency corresponding to the onset
of neutron star tidal disruption. The difference in wave signals between binary black
hole and black hole mergers is seen to be marginally observable in the Advanced LIGO
frequency band in most cases. Distinguishing binary black hole from binary black hole–
neutron star inspirals and mergers may thus require narrow-band wave detection techniques
with advanced detectors. The observation of an accompanying GRB would also serve to
distinguish the two types of events (and would be a dramatic discovery!). Should the chirp
mass determination, combined with higher order PN waveform phase effects, allow for an
47
Belczynski et al. (2002).
0
0
−2−4−6−8
−8
−6
−4
−2
2
2
46
4
Y / M
8
BH
NS
6
8
X / M
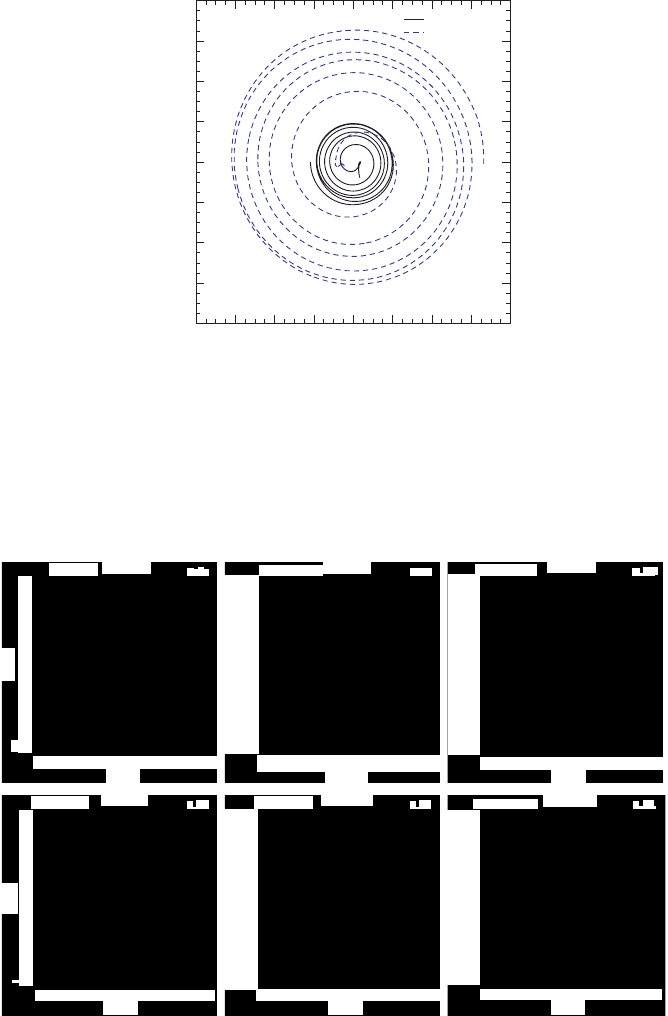
Figure 17.13 Trajectories of the black hole and neutron star coordinate centroids for the merger of an
irrotational neutron star orbiting a spinning black hole with spin J
BH
/M
2
BH
= 0.75 (case B). Compare with
Figure 17.8 for the merger of an identical neutron star with a nonspinning black hole, assuming the same binary
mass ratio q = 3 and initial orbital angular velocity M ≈ 0.033. [From Etienne et al. (2009).]
10
t = 0.0M
t = 616. 7M
Case B
Case B
0.5c
0.5c
t = 722.7M
Case B
0.5c
t = 1878.5M
Case B
0.5c
t = 998.9M
Case B
0.5c
t = 847.5M
Case B
0.5c
10
5
5
0
Y / MY / M
Y / MY / M
Y / MY / M
X / M X / M
0
−5
−5
−10
−10
10
10
5
5
0
0
−5
−5
−10
−10
X / M
10
10
5
5
0
0
−5
−5
−10
−10
X / M
10
10
5
5
0
0
−5
−5
−10
−10
X / M
10
10
5
5
0
0
−5
−5
−10
−10
X / M
10
10
5
5
0
0
−5
−5
−10
−10
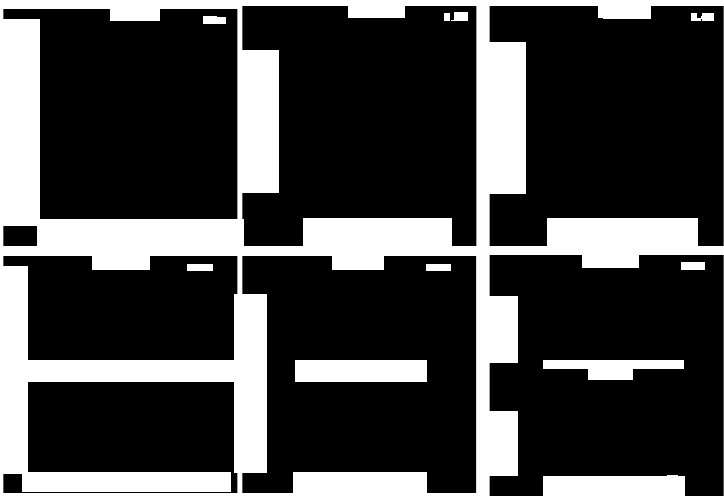
Figure 17.14 Snapshots of rest-density contours and 3-velocity vectors at selected times during the merger of
an irrotational neutron star orbiting a black hole with spin a/M
BH
= J
BH
/M
2
BH
= 0.75, as shown in Figure 17.13
(case B). The contours represent the density in the orbital plane, plotted according to
ρ
0
= ρ
0,max
10
−0.38 j−0.04
, ( j = 0, 1,...,12), with darker gray scaling for higher density. The maximum initial
neutron star density is Kρ
0,max
= 0.126, where K is the initial polytropic gas constant, or
ρ
0,max
= 9 × 10
14
g/cm
3
(1.4M
/M
0
)
2
. Arrows represent the velocity field in the orbital plane. The apparent
horizon interior is marked by a filled black circle. In cgs units, the initial ADM mass for this case is
M = 2.5 × 10
−5
(M
0
/1.4M
)s= 7.6(M
0
/1.4M
) km. [From Etienne et al. (2009).]
17.2 Dynamical simulations 593
0.0
−0.5
Case A
Case B
Case C
1
0.1
0.01
0 200 400 600 800 1000
(t − t
25
)/ M
a/M
BH
= 0.75
M
0
Fraction Outside AH
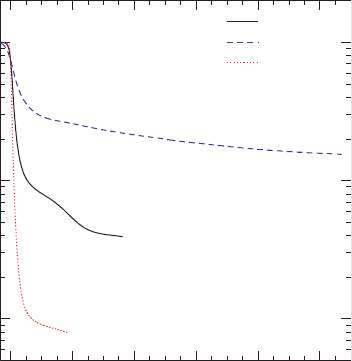
Figure 17.15 Rest-mass fraction outside the black hole as a function of time for the merger of an irrotational
neutron star orbiting a black hole with different initial black hole spins a/M
BH
. Here the time coordinate is
shifted by t
25
, the time at which 25% of the neutron star rest-mass has fallen into the apparent horizon. [From
Etienne et al. (2009).]
independent determination of the individual masses and spins of the binary companions,
the measurement of the black hole-neutron star tidal disruption frequency should give a
good estimate of the neutron star radius and, hence, insight into the nuclear EOS.
Irrotational neutron stars with spinning black holes
Etienne et al. (2009) also explore the effects of black hole spin on the merger of black
hole–neutron star binaries. They consider irrotational neutron stars orbiting spinning black
holes, taking the black hole spins to be either aligned or anti-aligned with the orbital
angular momentum. They again use conformal thin-sandwich quasiequilibrium initial
data for the binaries and evolve models with the initial spin parameter of the black hole
between J
BH
/M
2
BH
=−0.5 (anti-aligned) and 0.75, fixing the mass ratio at q = 3 and the
initial orbital angular velocity at M ≈ 0.033. As the initial spin parameter increases,
the total initial angular momentum increases, requiring more gravitational wave cycles
to emit sufficient angular momentum to bring the companions close enough to merge.
Not surprisingly, the binary undergoes more orbits before merger as J
BH
/M
2
BH
increases:
for spins −0.5, 0.0, and 0.75, the binary inspiral phase lasts for 3.25, 4.5, and 6.5 orbits,
respectively. The coordinate trajectories of the apparent horizon and neutron star centroids
are shown in Figure 17.13 for the case with J
BH
/M
2
BH
= 0.75 (case B).
Figure 17.14 shows snapshots of the density and velocity vectors at selected times during
the evolution for the J
BH
/M
2
BH
= 0.75 case. The upper plots in the figure demonstrate that
the neutron star retains its shape for four orbits (upper middle), and begins shedding
594 Chapter 17 Binary black hole–neutron stars
40
0.5c
Case E
40
20
20
0
0
X (km)
X (km)
−20
−20
−40
−40
40200
−20−40
40200
−20−40
Case A
Case B
Case B
50 100
100
0
0
−100
−100
50
−50
−50
0
0
0.5c 0.5c
Y (km)
Y (km)
Y (km)
X (km) X (km)
0.5c 0.5c
0.5c
Case E Case A
−50
20
40
50
50
100
−100
100
0
0
100
−100
100
0
0
00
0
−50
50
50
0
0
Z (km)
20
40
0
Z (km)
Z (km)
Z (km)
Z (km)
Z (km)
X(km)
X(km)
Y(km)
Y(km)
Y(km)
Figure 17.16 Snapshots of rest-density contours and 3-velocity vectors at the end of the simulations for three
binary black hole–neutron star merger scenarios (see text). The remnant disks are shown in the orbital plane
(upper row) and meridional plane (bottom rows). The contours represent the density plotted according to
ρ
0
= ρ
0,max
10
−0.1 j−3.3
( j = 0, 1,...,13) for cases A and B and ρ
0
= ρ
0,max
10
−0.19 j−2.32
( j = 0, 1,...,12) for
case E, with darker gray scaling for higher density. In all cases the maximum initial neutron star density is
Kρ
0,max
= 0.126, where K is the initial polytropic gas constant, or ρ
0,max
= 9 × 10
14
gcm
−3
(1.4M
/M
0
)
2
.
Arrows represent the velocity field. The apparent horizon interior in the orbital plane is marked by a filled black
circle. Length scales are specified in km, assuming the neutron star has a rest-mass of 1.4M
; it can be converted
to units of M via the formula M = 1.9(q + 1) km. [After Etienne et al. (2009).]
its outer layers due to tidal disruption only after about five orbits (upper right). In this
case the tail is quite massive (lower left), and by the time 75% of the mass has been
accreted (lower center) it is much larger than the tail measured at the same point for a
nonspinning black hole (lower left plot in Figure 17.9). The lower right plot is a snapshot
taken near the end of the simulation, when a quasistationary disk resides outside the BH.
The disk is massive: M
disk
/M
0
≈ 15%, corresponding to 0.2M
for a 1.4M
neutron
star. The maximum density of the disk is ρ
0,max
≈ 5 × 10
11
gcm
−3
and the characteristic
temperature is T ∼ 5 × 10
10
K(or∼4 MeV), values which are similar to the nonspinning
case. However, the disk is about twice as large in size, with a characteristic radius of
r
disk
= 100 km, in addition to being much more massive.
Etienne et al. (2009) conclude from their simulations that the black hole-neutron star
inspiral phase lasts longer the larger the spin J
BH
/M
2
BH
. Also, larger aligned spins form
more extensive and more massive disks: the final disk mass grows from < 1% of the initial
neutron star rest mass when the black hole has a spin J
BH
/M
2
BH
=−0.5 (case C) to ≈ 4%
17.2 Dynamical simulations 595
0
0
0
0
0
0
0.15
0.15
0.15
Case C
Case A
Case B
−0.15
−0.15
−0.15
200
(t − r
ex
)/M
(r
ex
/
M
)h
22
(r
ex
/
M
)h
22
(r
ex
/
M
)h
22
150 300
300
450
400
400200100
600
600
800
Figure 17.17 Gravitational wave signal for three binaries with mass ratio q = 3 and initial black hole spins (top
to bottom) J
BH
/M
2
BH
=−0.5, 0, and 0.75. The black solid (blue dash) line denotes the (2,2) mode of h
+
(h
×
)
extracted at r
ex
= 43.4M.[FromEtienne et al. (2009).]
foraspinof0(caseA)to≈ 15% for a spin of 0.75 (case B). Figure 17.15 shows the rest
mass outside the black hole as a function of time for these three cases, illustrating once
again the two phases of mass consumption by the black hole. If the formation of a massive
disk about a rotating black hole is a prerequisite for a short-hard GRB, then it appears that
the more rapidly spinning and closely aligned the initial black hole, the more likely it is to
power such a source by binary black hole–neutron star merger.
A comparison between the final disks formed in the three merger scenarios is shown in
Figure 17.16. Both the mass ratios and initial black hole spins are varied for a cross-the-
board comparison: recall that (q, J
BH
/M
2
BH
) =(1, 0) for case E, (3, 0) for case A and (3,
0.75) for case B.
Finally, we show a comparison between gravitational waveforms emitted for three merger
scenarios in Figure 17.17. The mass ratios are all identical (q = 3) but the initial black
hole spins are varied: J
BH
/M
2
BH
=−0.5 for case C, 0 for case A and 0.75 for case B.
Though tentalizing, all of these results are quite preliminary. Simulations that take
into account the detailed microphysics, including the correct hot, nuclear EOS, magnetic
fields and neutrino and photon transport, are necessary to fully assess the viability of and
mechanism for generating short-hard GRBs from binary black hole–neutron star mergers.
But much of the groundwork, especially the tool of numerical relativity, has been prepared
to carry out such simulations.

18
Epilogue
This is not the end.
It is not even the beginning of the end.
But it is, perhaps, the end of the beginning.
Winston Churchill (1942)
This brings us to the end of our introduction to numerical relativity. A quick glance
at the table of contents shows that we have covered a wide range of subjects, starting
with the foundations of numerical relativity and continuing with applications to different
areas of gravitational physics and astrophysics. Despite the breadth of our survey, we
have had to be selective in our choice of topics. Our focus has been on solving the
Cauchy problem in general relativity for dynamical, asymptotically flat spacetimes, with
applications to compact objects and compact binaries. There are a number of alternative
approaches for solving Einstein’s equations that we did not touch on at all, such as the
characteristic approach and the Regge calculus. We also did not discuss in any detail
applications involving strictly stationary spacetimes, such as gas accretion onto Kerr black
holes, although some of the same schemes we described for matter evolution have been
used successfully to treat problems with fixed background metrics. We trust that interested
readers will find discussions of the subjects we omitted elsewhere in the literature.
We hope that our treatment laying out the foundations of numerical relativity will remain
relevant for the foreseeable future. However, we suspect that some of the large-scale
simulations we have chosen to illustrate different implementations will be superseded
by more sophisticated calculations. Such calculations will invariably incorporate more
detailed microphysics and will take advantage of more advanced computational algorithms
and hardware. Yet we would like to believe that, at the very least, the examples we have
selected to highlight will help preview and elucidate these more sophisticated, future
simulations. We invite our readers to assess this situation for themselves.
Exercise 18.1 Pick one of the applications of numerical relativity treated in this
book, such as binary neutron star mergers, or magnetorotational stellar collapse, or
one of the other topics. Perform a search of the recent computational literature to
determine what new physical input or methods of solution have been implemented
and what new results have emerged for this application since the writing of this
book.
596
Chapter 18 Epilogue 597
One exciting prospect is that numerical relativity will be applied to areas of gravitational
physics and astrophysics that have yet to take full advantage of this powerful computational
tool. It is possible, for example, that numerical relativity will prove useful to probe certain
aspects of cosmology where homogeneity is not applicable and where neither perturbation
theory nor Newtonian gravitation is adequate. It is also possible that numerical relativity
will play a greater role in investigating the higher-dimensional spacetimes that arise in
quantum field theories, such as string theory. More than likely, there are areas that we
cannot even fathom now that will turn to numerical relativity in the future for computational
insight. We again leave it to future readers to identify such areas, or, even better, to lead
the charge!
Exercise 18.2 Do a casual search of the research literature and see if there are any
new applications of numerical relativity in physics or astrophysics that have not been
mentioned at all in this book.
A
Lie derivatives, Killing
vectors, and tensor densities
In this appendix we introduce a few of the mathematical concepts used in the book with which
some readers may be less familiar, namely, the Lie derivative, Killing vectors and tensor densities.
The aim of our presentation is to make these concepts transparent and easy to use in applications;
for a more complete and rigorous treatment we refer the reader to the discussions in, for example,
Schutz (1980) and Wald (1984).
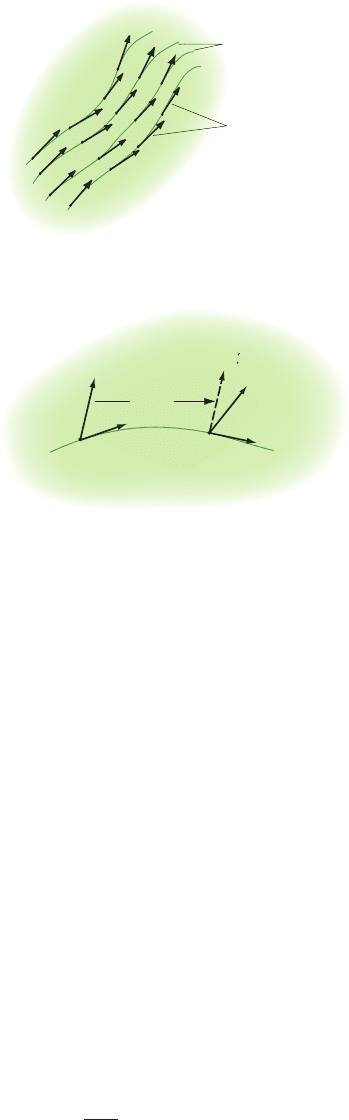
A.1 The Lie derivative
Consider a (nonzero) vector field X
a
in a manifold M.
1
We can find the integral curves x
a
(λ)(or
orbits, or trajectories) of X
a
by integrating the ordinary differential equations
dx
a
dλ
= X
a
(x(λ)). (A.1)
Here λ is some affine parameter, and we use bold-face notation x instead of index notation x
a
for
the coordinate location in the argument to make the expressions more transparent. For a sufficiently
well-behaved vector field X
a
a solution is guaranteed, at least locally, by the existence and
uniqueness theorem for ordinary differential equations. This procedure is completely equivalent
to finding the paths of fluid particles, given their fluid velocity. The integral curves x
a
(λ)are
now a family of curves in M, so that exactly one curve passes through each point in M (see
Figure A.1). Such a family is known as a congruence of curves. Obviously, at each point the
tangent to the integral curves is given by X
a
.
We would now like to define a derivative of a tensor field, say T
a
b
,usingX
a
. This involves
comparing the tensor field at two different points along X
a
,sayP and Q, and taking the limit as
Q tends to P. This is where we encounter a conceptual problem: what do we mean by comparing
two tensors at two different locations in the manifold M?
We could, of course, simply compare components of the tensor field T
a
b
at P, T
a
b
(P) and at
Q, T
a
b
(Q). This leads to the definition of the partial derivative. Note, however, what happens
under a coordinate transformation. The tensors T
a
b
(P) and T
a
b
(Q) have to be transformed with
the transformation matrix evaluated at the two points P and Q. In general the two matrices will
be different, and, accordingly, the result of this differentiation cannot be a tensor. This is one way
to understand why the partial derivative of a tensor is not a tensor.
In order to differentiate a tensor in a tensorial manner, we therefore have to evaluate the two
tensors at the same point. To do so, we have to drag one tensor to the other point before we can
compare the two tensors. For example, we can drag T
a
b
(P) along X
a
to the point Q.AtQ,we
1
This section closely follows the discussion in d’Inverno (1992).
598
A.1 The Lie derivative 599
vector field
X
integral curves x
a
M
a
Figure A.1 A vector field X
a
generates a congruence of curves x
a
.
P
Q
drag
T
b
a
(P )
T
b
a
(
Q
)
X
a
(P )
X
a
(Q )
T
b
a
(Q )
Figure A.2 Dragging a tensor T
a
b
from P to Q.
can then compare the dragged tensor, which we will denote with primes, T
a
b
(Q), with the tensor
already present at Q, T
a
b
(Q) (see Figure A.2).
However, this recipe still leaves open how we drag T
a
b
along X
a
. One approach would be to
parallel-transport the tensor T
a
b
from P to Q. This idea leads to the definition of the covariant
derivative. Put into words, the covariant derivative measures by how much the changes in a tensor
field along X
a
differ from being parallel-transported.
Parallel-transporting is not the only way of dragging T
a
b
along X
a
. In some sense an even more
straightforward approach is to view the dragging as a simple coordinate transformation from P to
Q. This, in fact, defines the Lie derivative. In other words, the Lie derivative along a vector field
X
a
measures by how much the changes in a tensor field along X
a
differ from a mere infinitesimal
coordinate transformation generated by X
a
. Unlike the covariant derivative, the Lie derivative
does not require an affine connection and hence requires less structure.
Consider now the infinitesimal coordinate transformation
x
a
= x
a
+ δλ X
a
(x), (A.2)
which maps the point P, with coordinates x
a
, into the point Q, with coordinates x
a
.Weregard
this as an active coordinate transformation, which maps points (and tensors) to new locations in
the old coordinate system. Completely equivalently, a passive coordinate transformation assigns
new coordinate values to the old point.
Assuming a coordinate basis we can differentiate (A.2) to find
∂x
a
∂x
b
= δ
a
b
+ δλ ∂
b
X
a
, (A.3)
600 Appendix A Lie derivatives, Killing vectors, and tensor densities
and, to first order in δλ,
∂x
a
∂x
b
= δ
a
b
− δλ ∂
b
X
a
. (A.4)
We now start at point P, where the components of the tensor field T
a
b
are T
a
b
(x). We map this
tensor into the primed tensor T
a
b
(x
)atQ with the help of the coordinate transformation (A.2)
T
a
b
(x
) =
∂x
a
∂x
c
∂x
d
∂x
b
T
c
d
(x)
= (δ
a
c
+ δλ ∂
c
X
a
)(δ
d
b
− δλ ∂
b
X
d
)T
c
d
(x)
= T
a
b
(x) + δλ (∂
c
X
a
T
c
b
(x) − ∂
b
X
c
T
a
c
(x)) + O(δλ
2
). (A.5)
For the purpose of defining the Lie derivative this is the result of dragging T
a
b
along X
a
from
P to Q. The components of the unprimed tensor already present at Q, T
a
b
(x
), can be related to
T
a
b
(x) by Taylor expanding
T
a
b
(x
) = T
a
b
(x
c
) = T
a
b
(x
c
+ δλ X
c
) = T
a
b
(x) + δλ X
c
∂
c
T
a
b
+ O(δλ
2
). (A.6)
We now denote the Lie derivative of T
a
b
with respect to X
a
as L
X
T
a
b
and define
L
X
T
a
b
≡ lim
δλ→0
T
a
b
(x
) − T
a
b
(x
)
δλ
.
(A.7)
This definition holds for any tensor of arbitrary rank and type (i.e., covariant and contravariant).
Note that we evaluate both tensors at the same point, so that the Lie derivative of a tensor is
again a tensor, and moreover a tensor of the same rank. Note also a subtlety of our abstract tensor
notation: The expression L
X
T
a
b
= (L
X
T )
a
b
implies that the Lie derivative of the tensor T
a
b
is
again a tensor of rank (
1
1
); it does not denote the Lie derivative of the a-b component of T
a
b
.
2
For our tensor T
a
b
of rank (
1
1
) we can insert (A.5) and (A.6)into(A.7) to find
L
X
T
a
b
= X
c
∂
c
T
a
b
− T
c
b
∂
c
X
a
+ T
a
c
∂
b
X
c
. (A.8)
The Lie derivative of a general tensor field can be found by first taking a partial derivative of the
tensor and contracting it with X
a
, and then adding additional terms involving derivatives of X
a
as in (A.8) for each index, with a negative sign for contravariant indices and a positive sign for
covariant indices.
We can always introduce an adapted coordinate system, in which, for example, the coordinate
basis vector e
a
(0)
is aligned with X
a
, and all the other coordinates are constant along X
a
. Setting
X
a
= e
a
(0)
then yields
X
α
= δ
α
0
= (1, 0,...,0). (A.9)
We have used Greek indices as opposed to the Latin indices of our abstract index notation, since
this relationship for components only holds in these adapted coordinates. Writing equation (A.8)
in this coordinate system, we immediately find
L
X
T
α
β
=
∂
∂x
0
T
α
β
. (A.10)
2
See also exercise (8.13) in Lightman et al. (1975).