Чернышев А.Ю., Дементьев Ю.Н., Чернышев И.А. Электропривод переменного тока
Подождите немного. Документ загружается.

41
хронного двигателя, сопряженный с вектором
10
I в неподвижной сис-
теме координат, и его составляющие, разложенные по осям неподвиж-
ной системы координат.
Так как произведение двух векторов определяется значениями их
модулей и углом между векторами и не зависит от того, в какой системе
координат они представлены, то в общем случае
(
)
yyxx
iuiuIUp
111111
2
3
Re
2
3
⋅+⋅=
⎟
⎠
⎞
⎜
⎝
⎛
⋅=
∗
. (2.53)
Подставим в (2.53) значения напряжений из первого уравнения
(2.50), разложив его по осям вращающейся системы координат
j
y
x
,,
получим
()
()
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⋅−⋅+
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
++⋅+
=
xyyx
y
y
x
x
yx
ii
i
dt
d
i
dt
d
Rii
p
1111кс
1
1
1
1
1
2
1
2
1
ψψω
ψ
ψ
2
3
, (2.54)
где
x1
ψ – составляющая вектора потокосцепления обмотки статора,
ориентированная вдоль оси
x
вращающейся системы координат;
y1
ψ – составляющая вектора потокосцепления обмотки статора,
ориентированная вдоль оси
y
вращающейся системы координат.
Анализ выражения (2.54) показывает, что первое слагаемое
в квадратных скобках есть тепловые потери в обмотках статора асин-
хронного двигателя. Второе слагаемое – изменение электромагнитной
энергии, запасенной в индуктивностях обмоток статора, которое при
const ψ
1
= равно нулю. Третье слагаемое – электромагнитная мощность
э
p ,
передаваемая со стороны статора в воздушный зазор.
Электромагнитный момент асинхронного двигателя
()
[]
xyyx
p
pp
ii
z
Izz
p
M
111111
э
ψψ
2
3
ψIm
2
3
ω
⋅−⋅
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
∗==
∗
. (2.55)
Выражение (2.55), определяющее электромагнитный момент,
не единственное для асинхронного двигателя.
Используя уравнения связи между векторами потокосцеплений
и токов двигателя
⎪
⎩
⎪
⎨
⎧
⋅+⋅=
⋅+⋅=
,ψ
;ψ
12
2
2
21
1
1
ILIL
ILIL
m
m
момент асинхронного двигателя можно выразить через любую пару
векторов
2121
ψ ,ψ , , II .
42
Ниже даны другие равнозначные варианты уравнений электромаг-
нитного момента асинхронного двигателя в виде скалярных произведе-
ний векторов в их компактной и развернутой формах. Формулы приве-
дены для моделирования асинхронного двигателя в неподвижных коор-
динатах и позволяют в каждом конкретном случае выбирать наиболее
благоприятный вариант вычисления момента:
()
;ψψψψ
2
3
ψψIm
2
3
2121
'
21
21
'
21
baab
mpmp
LL
Lz
LL
Lz
M ⋅−⋅
σ⋅⋅⋅
⋅
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
∗
σ⋅⋅⋅
⋅⋅
=
∗
(2.56)
()
;ψψ
2
3
ψIm
2
3
2121
1
2
1
1
baab
mpmp
ii
L
Lz
I
L
Lz
M ⋅−⋅
⋅
⋅
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
∗
⋅
⋅
⋅
=
∗
(2.57)
()
;
2
3
Im
2
3
12121
2
abba
mpmp
iiii
Lz
II
Lz
M ⋅−⋅
⋅
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
∗
⋅⋅
=
∗
(2.58)
()
;ψψ
2
3
ψIm
2
3
1212
'
2
1
'
2
2
abba
mpmp
ii
L
Lz
I
L
Lz
M
⋅−⋅
⋅
⋅
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
∗
⋅
⋅⋅
=
∗
(2.59)
()
,ψψ
2
3
ψIm
2
3
22222
2
baab
pp
ii
z
I
z
M ⋅−⋅
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
∗
⋅
=
∗
(2.60)
где
a1
ψ – составляющая вектора потокосцепления обмотки статора,
ориентированная вдоль оси a неподвижной системы координат;
b1
ψ –
составляющая вектора потокосцепления обмотки статора, ориентиро-
ванная вдоль оси
b
неподвижной системы координат;
a
i
1
– составляю-
щая вектора тока обмотки статора, ориентированная вдоль оси a не-
подвижной системы координат;
b
i
1
– составляющая вектора тока обмот-
ки статора, ориентированная вдоль оси b неподвижной системы коор-
динат;
a2
ψ – составляющая вектора потокосцепления обмотки ротора,
ориентированная вдоль оси a неподвижной системы координат;
b2
ψ –
составляющая вектора потокосцепления обмотки ротора, ориентиро-
ванная вдоль оси
b
неподвижной системы координат;
a
i
2
– составляю-
щая вектора тока обмотки ротора, ориентированная вдоль оси a непод-
вижной системы координат;
b
i
2
– составляющая вектора тока обмотки
ротора, ориентированная вдоль оси b неподвижной системы координат;
∗
2
I – вектор тока, комплексно сопряженный с вектором тока ротора
'
2
I ;
1
ψ – вектор потокосцепления обмотки статора;
∗
1
ψ – вектор потокосце-
пления, комплексно сопряженный с вектором потокосцепления обмотки
43
статора
1
ψ ;
2
ψ – вектор потокосцепления обмотки ротора;
∗
2
ψ – вектор
потокосцепления, комплексно сопряженный с вектором потокосцепле-
ния обмотки ротора
2
ψ .
2.9. Моделирование асинхронного двигателя
в неподвижной системе координат
При моделировании динамических процессов в неподвижной сис-
теме координат трехфазный асинхронный двигатель чаще всего сводят
к двухфазной машине, у которой две обмотки a и
b сдвинуты в про-
странстве на 90 градусов и совмещены с координатными осями
j
ba,.
Установлено, что при питании обмоток статора двухфазного асинхрон-
ного двигателя синусоидальными напряжениями, сдвинутыми на 90 эл.
град., удается обеспечить в зазоре электрической машины круговое
вращающееся электромагнитное поле.
Переходные процессы, а также уравнение динамической механиче-
ской характеристики короткозамкнутого двухфазного асинхронного
двигателя, получающего питание от сети или индивидуального преоб-
разователя, обладающего свойствами
источника напряжения, можно
получить из совместного решения системы дифференциальных уравне-
ний (2.49) и одного из уравнений электромагнитного момента двигателя
(2.55)–(2.60).
Из векторных уравнений (2.49) выделим их составляющие по осям
j
ba , неподвижной системы координат, то есть их вещественную
и мнимую части, и после преобразований получим
;ψψ
ψ
;ψψ
ψ
2
2
1
1
1
1
1
2
2
1
1
1
1
1
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
σ⋅
−=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
σ⋅
−=
b
m
bb
b
a
m
aa
a
L
L
L
R
U
dt
d
L
L
L
R
U
dt
d
()
2
2
2
2
'
2
21 2
'
1
'
2
21 2
'
1
12 12
1
ψ
ψψ ψ;
ψ
ψψ ψ;
3
ψψ.
2
am
aa b
bm
bb a
pm
ba ab
R
dL
dt L L
R
dL
dt L L
zL
Mii
L
⎛⎞
=− − −ω⋅
⎜⎟
⋅σ
⎝⎠
⎛⎞
=− − +ω⋅
⎜⎟
⋅σ
⎝⎠
⋅⋅
=⋅−⋅
⋅
(2.61)
44
σ
1
1
⋅L
p
1
σ
'
1
2
⋅⋅ LL
L
m
1
R
−
−
b
i
1
b
U
1
σ
1
'
2
⋅L
p
1
σ
'
1
2
⋅⋅ LL
L
m
'
2
R
−
−
a
i
2
σ
1
'
2
⋅L
p
1
'
2
R
−
−
b
i
2
−
1
2
3
L
L
z
m
p
⋅
д
M
с
M
−
pJ ⋅
1
ω
−
σ
1
1
⋅L
p
1
σ
'
1
2
⋅⋅ LL
L
m
1
R
−
−
a
i
1
a
U
1 a1
ψ
b1
ψ
a2
ψ
b2
ψ
σ
'
1
2
⋅⋅ LL
L
m
σ
1
1
⋅L
p
1
σ
'
1
2
⋅⋅ LL
L
m
1
R
−
−
b
i
1
b
U
1
σ
1
'
2
⋅L
p
1
σ
'
1
2
⋅⋅ LL
L
m
'
2
R
−
−
a
i
2
σ
1
'
2
⋅L
p
1
'
2
R
−
−
b
i
2
−
1
2
3
L
L
z
m
p
⋅
д
M
с
M
−
pJ ⋅
1
pJ ⋅
1
ω
−
σ
1
1
⋅L
p
1
σ
'
1
2
⋅⋅ LL
L
m
1
R
−
−
a
i
1
a
U
1 a1
ψ
b1
ψ
a2
ψ
b2
ψ
σ
'
1
2
⋅⋅ LL
L
m
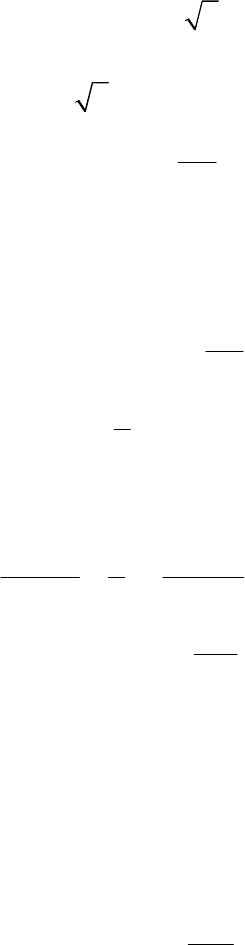
Рис. 2.13. Структурная схема короткозамкнутого асинхронного двигателя
в неподвижной системе координат
2
R
′
2
R
′

45
В системе уравнений (2.61) приняты следующие обозначения:
a
U
1
– составляющая вектора напряжения обмотки статора, ориентиро-
ванная вдоль оси a неподвижной системы координат;
b
U
1
– составляющая вектора напряжения обмотки статора, ориентиро-
ванная вдоль оси b неподвижной системы координат;
m
LLL +=
σ11
– эквивалентная индуктивность обмотки статора, равная
индуктивности рассеяния обмотки статора и индуктивности от главного
поля;
m
LLL +=
σ
''
2
2
– эквивалентная индуктивность обмотки ротора, приве-
денная к обмотке статора, равная индуктивности рассеяния обмотки ро-
тора и индуктивности от главного поля;
m
L – индуктивность от главного поля (контура намагничивания), созда-
ваемая суммарным действием токов статора;
'
21
2
1σ
LL
L
m
⋅
−= – коэффициент рассеяния.
Электромеханические процессы в электроприводе описываются
уравнением движения. Для случая
const:J
Σ
=
dt
d
JMM
ω
c Σ
=− .
Структурная схема динамической модели короткозамкнутого асин-
хронного электродвигателя, соответствующая системе уравнений (2.61),
приведена на рис. 2.13.
Анализ динамических процессов преобразования энергии в асин-
хронном двигателе представляет собой сложную задачу в связи с суще-
ственной нелинейностью уравнений, описывающих асинхронный дви-
гатель, обусловленной произведением переменных. Поэтому исследова-
ние динамических характеристик асинхронного двигателя целесообраз-
но вести с применением средств вычислительной техники.
Пример 2.4. Для короткозамкнутого асинхронного двигателя типа
4А112МВ6У3 рассчитать и построить динамическую механическую ха-
рактеристику. Основные параметры двигателя:
0,4
=
P
кВт;
220
1н
=U
В;
125,9
н1
=I А; 50=
f
Гц; 3
=
р
z ; 878,1
1
=
R Ом; 248,2
σ1
=X Ом;
393,1
'
2
=R
Ом; 994,2
'
σ2
=X Ом;
98,47
=
m
X
Ом;
2
д
мкг 042,02 ⋅==
Σ
JJ .
Решение. Динамическую модель асинхронного двигателя составим
в соответствии с его структурной схемой, приведенной на рис. 2.13.
Моделирование асинхронного двигателя будем производить в относи-
46
тельных единицах. Введение относительных единиц позволяет перейти
в уравнениях (2.61) от индуктивностей
L
к индуктивным сопротивле-
ниям
X
без их пересчета, существенно сокращает время моделирова-
ния и позволяет устранить многие проблемы при моделировании, а диа-
пазон численных значений переменных, как правило, значительно
меньше, чем в системе с абсолютными значениями переменных – токов,
моментов, мощностей [7, 8, 9, 10].
Для описания моделей асинхронных двигателей будем использовать
следующую систему относительных единиц, приняв в качестве базисных:
•
амплитудное значение номинального фазного напряжения обмотки
статора
б 1max. н 1н
2UU U
=
=⋅;
•
амплитудное значение номинального фазного тока обмотки статора
б 1max. н 1н
2
I
II==⋅;
•
сопротивление
б
б
б
I
U
Z = ;
•
безразмерное время t
⋅
=
б
ωτ ;
•
номинальное значение угловой частоты напряжения обмотки ста-
тора
н1нб
2ωω f⋅π⋅== ;
•
потокосцепление
б
б
б
ω
ψ
U
= ;
•
мощность
ббб
2
3
IUP ⋅= ;
•
энергию τ
бб
⋅
=
PW ;
•
электромагнитный момент, момент сопротивления
б
бб
б
б
б
ω2
3
ω
IU
z
zP
M
p
p
⋅
=
⋅
= ;
•
момент инерции
2
б
б
б
ω
W
J = .
Так как в дальнейшем будут использоваться уравнения, записанные
в основном в относительных единицах, то в них обозначения токов, на-
пряжений, потокосцеплений, сопротивлений оставим прежними.
Уравнения для электромагнитного момента асинхронного двигате-
ля в относительных единицах получим после деления (2.55)–(2.60) на
базисный момент
б
M :
()
baab
m
ii
X
X
2121
1
ψψμ ⋅−⋅= ; (2.62)
47
()
baab
m
XX
X
2121
'
21
ψψψψμ ⋅−⋅
σ⋅⋅
=
; (2.63)
(
)
abba
ii
1111
ψψμ
⋅
−
⋅
= ; (2.64)
(
)
abbam
iiiiX
1212
μ
⋅
−
⋅
= ; (2.65)
()
abba
m
ii
X
X
1212
'
2
ψψμ ⋅−⋅=
; (2.66)
(
)
baab
ii
2222
ψψμ
⋅
−
⋅
=
. (2.67)
Уравнение движения асинхронного двигателя в относительных
единицах получим, разделив (1.7) на
б
M :
τ
υ
μμ
cд
d
d
H
Σ
=− , (2.68)
где
б
2
б
Σ
M
J
H
ω⋅
=
Σ
– эквивалентный момент инерции в относительных
единицах.
Имитационное моделирование динамических процессов в асинхрон-
ном двигателе произведем в соответствии со структурной схемой
(рис. 1.11) в программной среде WINDORA. С целью упрощения набора
имитационной модели выделим повторяющуюся часть (рис. 2.14) струк-
турной схемы короткозамкнутого асинхронного двигателя и создадим
«Суперблок» (рис. 2.15), который моделирует повторяющуюся часть, что
значительно упрощает набор имитационной модели.
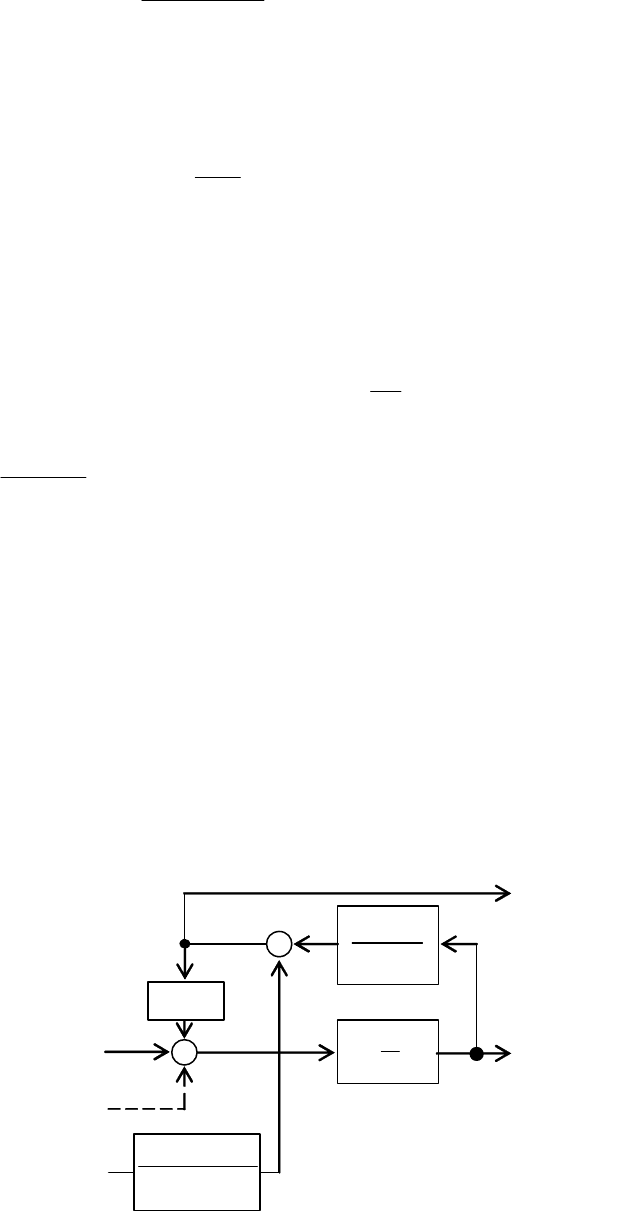
σ
1
1
⋅X
p
1
σ
21
⋅⋅ XX
X
m
1
R
−
−
j
i
j
U
j
ψ
−
Вход1
Вход2
Вход3
Выход1
Выход2
Рис. 2.14. Повторяющаяся часть структурной схемы
короткозамкнутого асинхронного двигателя
Выход 1
Выход 2 Вход 1
Вход 2
Вход 3
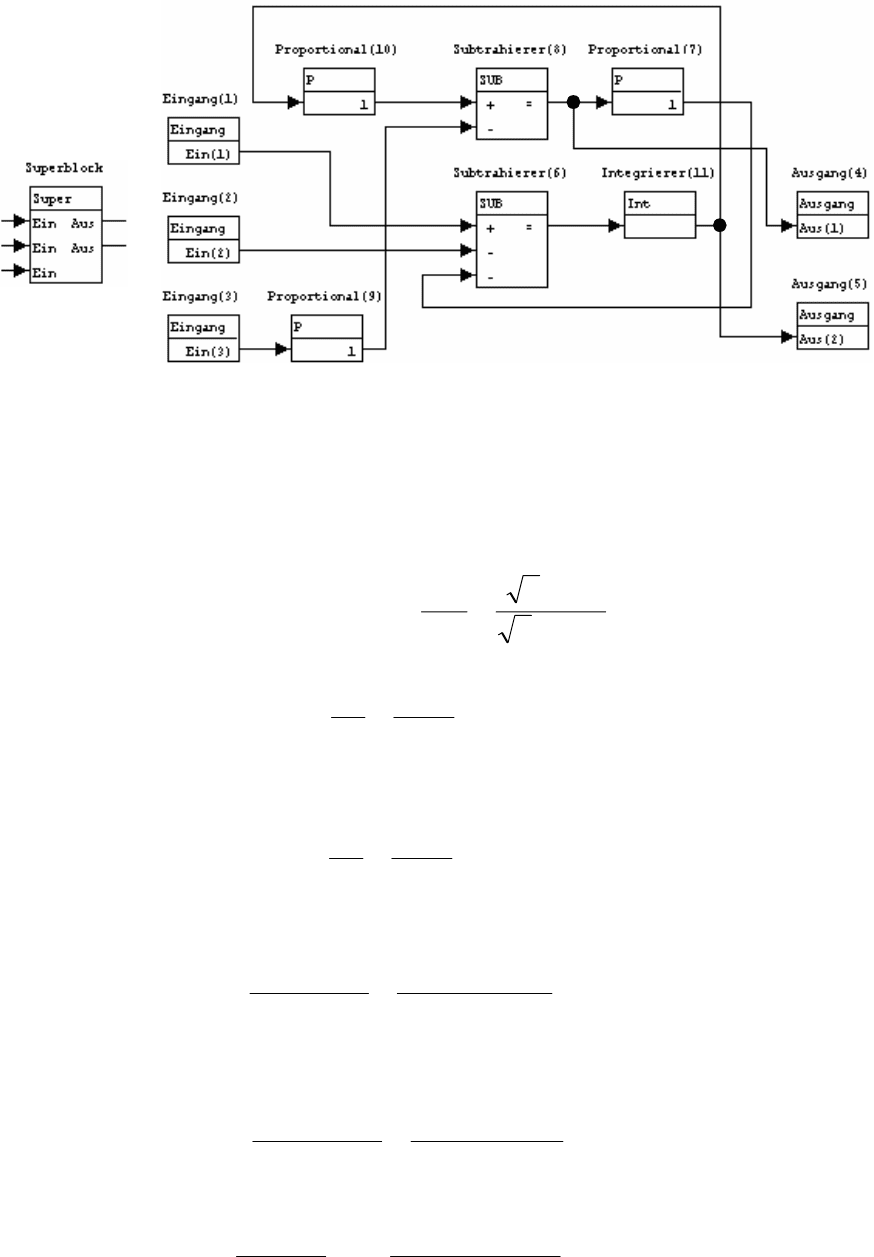
48
1
2
Рис. 2.15. Модуль суперблока имитационной модели
короткозамкнутого асинхронного двигателя:
1 – условное графическое обозначение; 2 – структурная схема
Определим значения безразмерных коэффициентов структурной
схемы асинхронного двигателя с учетом принятой системы базисных
величин.
•
Базисное сопротивление 11,24
125,92
2202
1н
1н
б
=
⋅
⋅
==
I
U
Z о. е.
•
Относительное активное сопротивление обмотки статора
0779,0
11,24
878,1
б
1
1
===
∗
Z
R
R о. е.
• Относительное активное сопротивление обмотки ротора, приве-
денное к обмотке статора:
0578,0
11,24
393,1
б
'
2
'
2
===
∗
Z
R
R о. е.
•
Относительное эквивалентное индуктивное сопротивление обмот-
ки статора
043,2
11,24
98,47248,2
б
σ1
1
=
+
=
+
=
∗
Z
XX
X
m
о. е.
• Относительное эквивалентное индуктивное сопротивление обмот-
ки ротора, приведенное к обмотке статора:
114,2
11,24
98,47994,2
б
'
'
σ2
2
=
+
=
+
=
∗
Z
XX
X
m
о. е.
• Коэффициент рассеяния
1009,0
974,50228,50
98,47
11σ
2
'
21
2
=
⋅
−=
⋅
−=
XX
X
m
о. е.
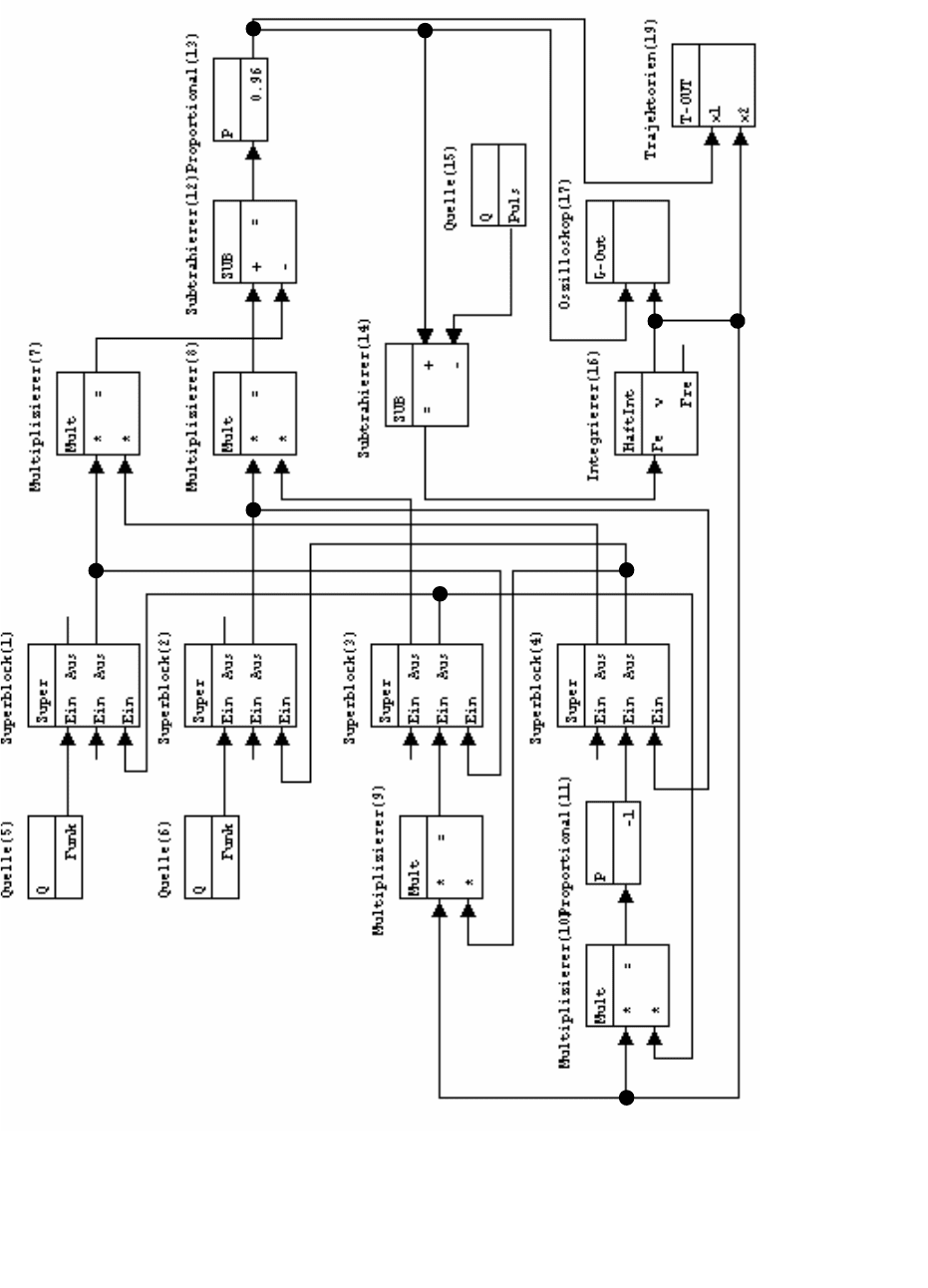
49
Рис. 2.16. Схема имитационной модели короткозамкнутого асинхронного двигателя
в неподвижной системе координат
49
50
• Вспомогательные коэффициенты
85,4
1009,0043,2
1
σ
1
1
=
⋅
=
⋅
∗
X
о. е.;
688,4
1009,0114,2
1
σ
1
2
=
⋅
=
⋅
∗
X
о. е.;
566,4
1009,0114,2043,2
99,1
σ
'
21
=
⋅⋅
=
⋅⋅
∗∗
∗
XX
X
m
о. е.
•
Базисный момент
52,57
15,314
125,92202
3
2
3
ω2
3
б
бб
б
=
⋅
⋅
=
⋅
=
IU
zM
p
о. е.
•
Эквивалентный момент инерции в относительных единицах
06,72
52,57
15,314042,0
2
б
2
б
б
=
⋅
=
ω⋅
==
ΣΣ
M
J
J
J
H
о. е.
Полная схема имитационной модели короткозамкнутого асинхронного
двигателя, составленная в соответствии со структурной схемой рис. 2.13.
в неподвижной системе координат, приведена на рис. 2.16.
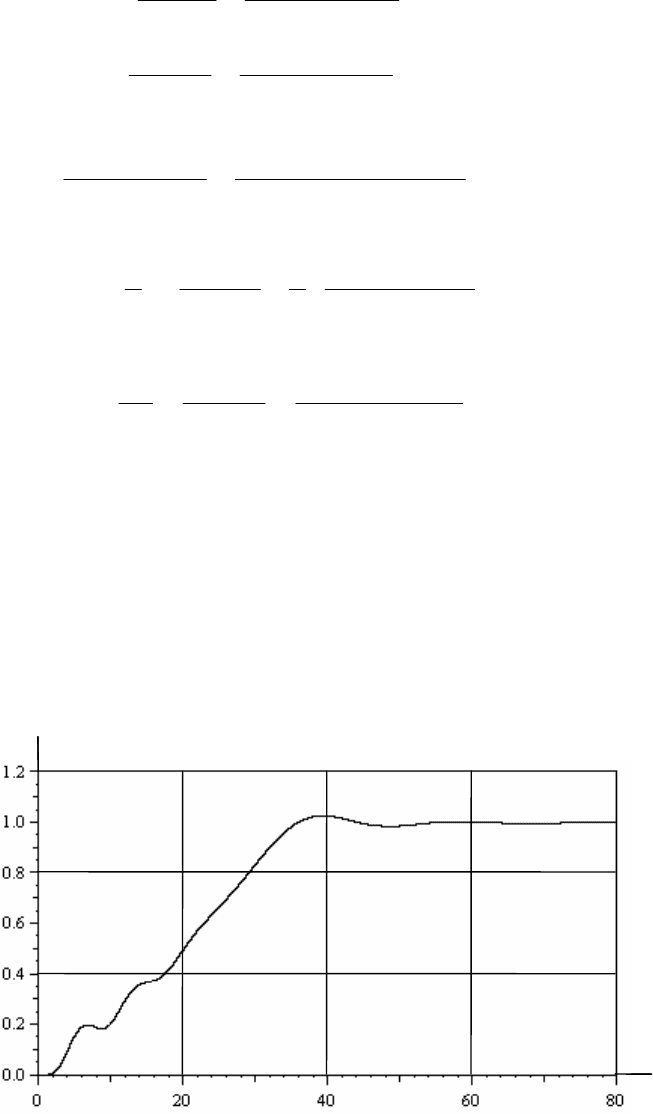
Так как динамическую механическую характеристику асинхронно-
го двигателя можно получить только по результатам расчетов переход-
ных процессов, то вначале приведем графики переходных процессов
скорости рис
. 2.17 и момента рис. 2.18 при пуске двигателя прямым
включением в сеть.
τ
ω
е. о.
е. о.
τ
ω
е. о.
е. о.
Рис. 2.17. Переходный процесс скорости при пуске
короткозамкнутого асинхронного двигателя прямым включением
в сеть при моделировании в неподвижной системе координат