Чернышев А.Ю., Дементьев Ю.Н., Чернышев И.А. Электропривод переменного тока
Подождите немного. Документ загружается.

81
)1(
14
)(
μc
22
μccc
μc
со
+⋅⋅
+
⋅
⋅
=
pTpTa
pT
pW
, (3.33)
где
164
cc
−=a – коэффициент настройки контура скорости на симмет-
ричный оптимум;
8
cc
=a – стандартный коэффициент настройки.
Передаточная функция разомкнутого контура скорости (рис. 3.19) с
учетом суммарной малой постоянной времени определяется следующим
уравнением:
с
m
мтрн
рскс
1
1
)()( k
pJpT
kk
pWpW ⋅
⋅
⋅
⋅+
⋅
⋅=
Σ
. (3.34)
Приравнивая правые части выражений (3.33) и (3.34) и решая по-
лученное уравнение относительно передаточной функции регулятора
скорости, получим
pT
kpW
⋅
+=
рc
рсрс
1
)(
, (3.35)
где
m
Tkkka
J
k
⋅⋅⋅⋅
⋅
=
смтрнсс
Σ
рс
4
– коэффициент усиления регулятора ско-
рости;
Σ
⋅⋅⋅⋅
=
J
Tkkka
T
m
2
смтрнcc
рс
– постоянная времени интегрирования
регулятора скорости, с.
Графики переходных процессов момента и скорости электроприво-
дов, настроенных на модульный и симметричный оптимум, определены
для различных
c
a [15]. Однако для асинхронного электропривода,
имеющего участок механической характеристики с положительной же-
сткостью
β
k , проверка переходного процесса на устойчивость пред-
ставляет практический и теоретический интерес.
Пример 3.2. Для асинхронного короткозамкнутого двигателя типа
4А112МВ6У3 рассчитать и построить графики изменения жесткости
β
k
и коэффициента чувствительности по моменту
м
k
от угловой скорости
ω для номинального фазного напряжения. Найти максимальные значе-
ния жесткости
β
k и коэффициента чувствительности по моменту
м
k
в абсолютных и относительных величинах. Основные параметры двига-
теля и его схемы замещения приведены в примере 2.1.
Решение. Воспользуемся аналитическим выражением (3.7) для оп-
ределения жесткости
82
()
2'
12
β
2
1
2
''
0
012 1σ 2σ
0
ω
ω
ωω
(ωω)
ω
cj
mU R
dM
kd d
d
RR X X
−
⎛⎞
⎜⎟
⎜⎟
⋅⋅
⎜⎟
==
⎜⎟
⎡⎤
⎛⎞
⎛⎞
−
⎜⎟
⎢⎥
⎜⎟
−⋅ +⋅ + +
⎜⎟
⎜⎟
⎜⎟
⎢⎥
⎝⎠
⎜⎟
⎝⎠
⎣⎦
⎝⎠
,
подставив в (3.7) численные значения параметров, получим:
()
2
β
2
1
2
3 220 1,393
ω
ω
104, 7 ω
(104,7 ω) 1,878 1,393 5, 242
104,7
dM
kd d
d
−
⎛⎞
⎜⎟
⎜⎟
⋅⋅
⎜⎟
==
⎜⎟
⎡⎤
⎛⎞
−
⎛⎞
⎜⎟
⎢⎥
−⋅ + ⋅ +
⎜⎟
⎜⎟
⎜⎟
⎜⎟
⎢⎥
⎝⎠
⎝⎠
⎣⎦
⎝⎠
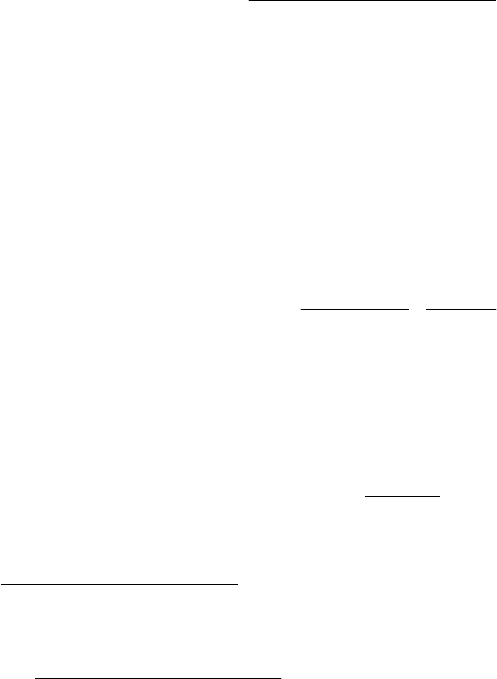
Кривая зависимости )ω(
β
fk = , рассчитанная в математической системе
MathCAD, приведена на рис. 3.20.
Максимальное значение
β
k в диапазоне скоростей от 0 до
0
ω
р
адсмН716,0
max
β
⋅
⋅=k
, минимальное значение –
β min
9,499 Нмсрадk
=
−⋅⋅.
Жесткость
β
k двигателя в относительных единицах на устойчивом
участке механической характеристики найдем в соответствии с выраже-
нием (3.21):
н
β
1
s
k −=
∗
.
При подстановке численных значений параметров получим
6,19
051,0
1
β
−=−=
∗
k
о. е.
Жесткость
β
k двигателя в относительных единицах на неустойчи-
вом участке механической характеристики определим в соответствии
с выражением (3.22):
)1(
к
пmax
β
s
kk
k
−
−
=
∗
,
где
н
п
п
M
M
k = – кратность пускового момента, о. е.
83
10
−
8
−
6
−
4
−
2
−
0
50
100
срад
радсмН ⋅⋅
β
k
ω
10
−
8
−
6
−
4
−
2
−
0
50
100
срад
радсмН ⋅⋅
β
k
ω
Рис. 3.20. Кривая зависимости жесткости
β
k от угловой скорости ω
Значение пускового момента
п
M найдем из (2.6):
(
)
(
)
][
2
'
σ2σ1
2
1'
210
'
2
2
1
XXsRRs
RUm
M
jc
++⋅+⋅⋅ω
⋅⋅
=
−
,
приняв 1=
s
. При подстановке численных значений параметров получим
(
)
()
мН 59,50
]994,2248,21393,1878,1[17,104
393,12203
2
2
1
2
п
⋅=
++⋅+⋅⋅
⋅⋅
=
−
M .
Номинальный момент двигателя
мН 25,40
36,99
4000
ω
н
н
н
⋅===
P
M .
Тогда
25,1
25,40
59,50
п
==k
о. е.
Жесткость
∗β
k двигателя в относительных единицах на неустойчи-
вом участке механической характеристики после подстановки числен-
ных значений параметров:
е. о. 26,1
)2456,01(
25,12,2
β
=
−
−
=
∗
k
Аналитическое выражение для коэффициента чувствительности по
моменту
м
k найдем из выражения (3.23):
2
к
2
0
2
0
0к0кн
м
ω)ωω(
)ωω(ω4
s
UsM
dU
dM
k
⋅+−
⋅
−
⋅
⋅
⋅
⋅
==
∗
∗
.
84
Подставив в (3.23) численные значения параметров для номиналь-
ного напряжения статора, получим
м
22 2 2
4 93,216 104,7 0,2456 (104,7 ω) 1 9587,94 (104,7 ω)1
.
(104, 7 ω) 104,7 0,2456 (104,7 ω)661,22
dM
k
dU
∗
⋅⋅⋅⋅−⋅ ⋅−⋅
== =
−+ ⋅ −+
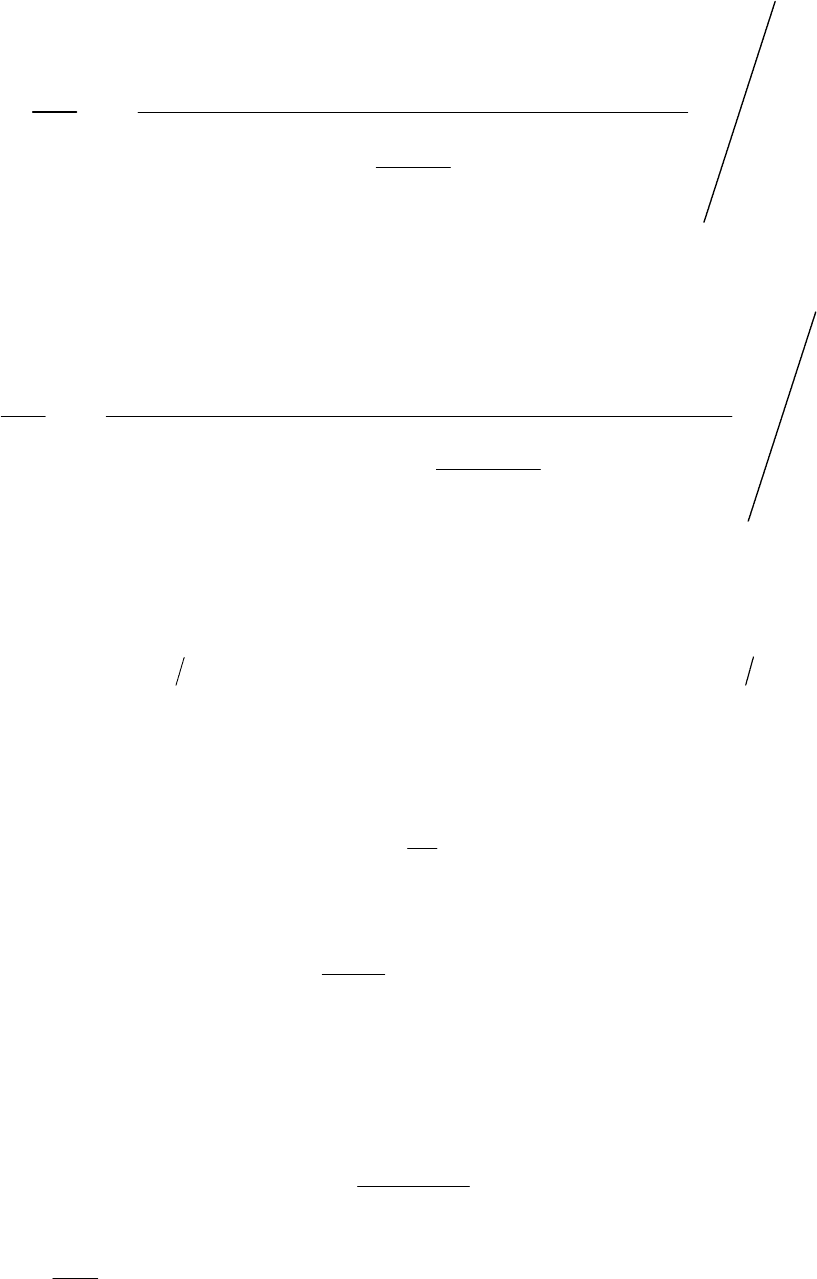
Рассчитанные по (3.23) значения коэффициента чувствительности по
моменту
м
k от скорости приведены на рис. 3.21.
Максимальное значение коэффициента чувствительности по мо-
менту
max м
k
можно найти из (3.24):
∗
⋅
⋅
=
UMk
кнм
2.
100
50
0
50 100
150
срад
м
k
ω
1
ВмН
−
⋅⋅
100
50
0
50 100
150
срад
м
k
ω
1
ВмН
−
⋅⋅
Рис. 3.21. Зависимость коэффициента чувствительности
по моменту
м
k от скорости асинхронного двигателя
ω
Подставив в (3.24) численные значения параметров для номиналь-
ного фазного значения напряжения, получим
1
м max кн
2 1 2 93,216 1 186,432 НмВkM
−
=
⋅⋅=⋅ ⋅= ⋅⋅.
В относительных единицах
е. о. 4,42,222
maxmax м
=
⋅
=
⋅
=
∗
kk
Найденные значения жесткости
∗βmax
k и коэффициента чувстви-
тельности по моменту
∗max м
k
будем использовать при синтезе параметров
регуляторов асинхронного электропривода с обратной связью по скорости.
Пример 3.3. Рассчитать переходные процессы электропривода
тиристорный регулятор напряжения–асинхронный двигатель с отри-
цательной обратной связью по скорости при пуске на максимальное
задающее напряжение 10 В. Нагрузку на валу двигателя принять рав-
ной номинальной. Структурная схема электропривода приведена на
рис. 3.19. Параметры двигателя, преобразователя и системы управле-
ния принять из условия примера 3.2.
85
Решение. Расчет переходных процессов и параметров структурной
схемы асинхронного электропривода будем производить в относитель-
ных единицах.
• В качестве расчетного значения коэффициента чувствительности
по моменту
м
k принимаем его максимальное значение
м max
k
∗
=
max
24,4k=⋅ =
о. е., при котором условия устойчивости контура регули-
рования скорости наихудшие.
•
В качестве расчетного значения жесткости при моделировании
электропривода принимаем его максимальное значение е. о. 26,1
β
=
∗
k ,
при котором условия устойчивости электропривода также наихудшие.
•
Принимаем напряжение смещения В 3
см
=
U для получения меха-
нической характеристики, обеспечивающей минимальный необходимый
момент электропривода.
•
Напряжение смещения в относительных единицах
.е .о 3,0
10
3
max з
см
см
===
∗
U
U
U ,
где
В 10
max з
=U
– максимальное задающее напряжение.
•
Напряжение насыщения регулятора скорости
0,1
max рс
=
∗
U о. е.
•
Напряжение насыщения сумматора (рис. 3.13 и 3.19)
0,1
maxу
=
∗
U о. е.
•
Тиристорный регулятор напряжения принимаем апериодическим
звеном с постоянной времени
00167,0
5062
1
2
1
1
трн
=
⋅⋅
=
⋅⋅
=
fm
T с,
где m – число управляемых полупериодов напряжения за период на-
пряжения питающей сети;
1
f – частота питающей сети.
•
Постоянная времени тиристорного регулятора напряжения в отно-
сительных единицах
е. о. 525,015,31400167,0ω
бтрнтрн
=
⋅
=
⋅= TT
•
Коэффициент передачи тиристорного регулятора напряжения
22
10
220
maxу
1н
трн
===
U
U
k
о. е.,
где
1н
U – номинальное фазное напряжение.
86
• Номинальная угловая скорость двигателя
36,99)051,01(7,041)1(ωω
н0н
=
−
=
−
=
s срад .
•
Коэффициент обратной связи по скорости
радсВ 100,0
36,99
10
ω
н
maxз
c
⋅===
U
k ,
где
В 10
maxз
=U
– максимальное задающее напряжение;
н
ω
– номи-
нальная угловая скорость асинхронного двигателя.
Коэффициент обратной связи по скорости в относительных единицах
1
c
=
∗
k
о. е.
•
Электромагнитную постоянную времени двигателя определим по
(3.25):
0051,0
)393,1878,1(5014,32
994,2248,2
)(2
'
21н
'
2σ1σ
'
21
'
21
э
=
+⋅⋅
+
=
+⋅π⋅
+
=
+
+
=
RRf
XX
RR
LL
T с.
•
Электромагнитная постоянная времени двигателя в относительных
единицах
602,115,3140051,0ω
бээ
=
⋅
=
⋅=
∗
TT о. е.
•
Суммарная малая постоянная времени
00677,00051,000167,0
этрн
=
+
=
+= TTT
m
с.
Суммарная малая постоянная времени в относительных единицах
127,215,31400677,0ω
б
=
⋅
=
⋅=
∗ mm
TT о. е.
•
Эквивалентный момент инерции в относительных единицах
06,72
52,57
15,314042,0
ω
2
б
2
б
б
=
⋅
=
⋅
==
Σ
Σ
M
J
J
J
H о. е.
•
Коэффициент передачи регулятора скорости при настройке на мо-
дульный оптимум найдем из (3.35), приняв стандартный коэффициент
настройки 2
μc
=a :
174,0
4,4221127,22
06,72
мтрнсμс
рс
=
⋅⋅⋅⋅
=
⋅⋅⋅⋅
=
∗∗∗
kkkTa
H
k
m
.
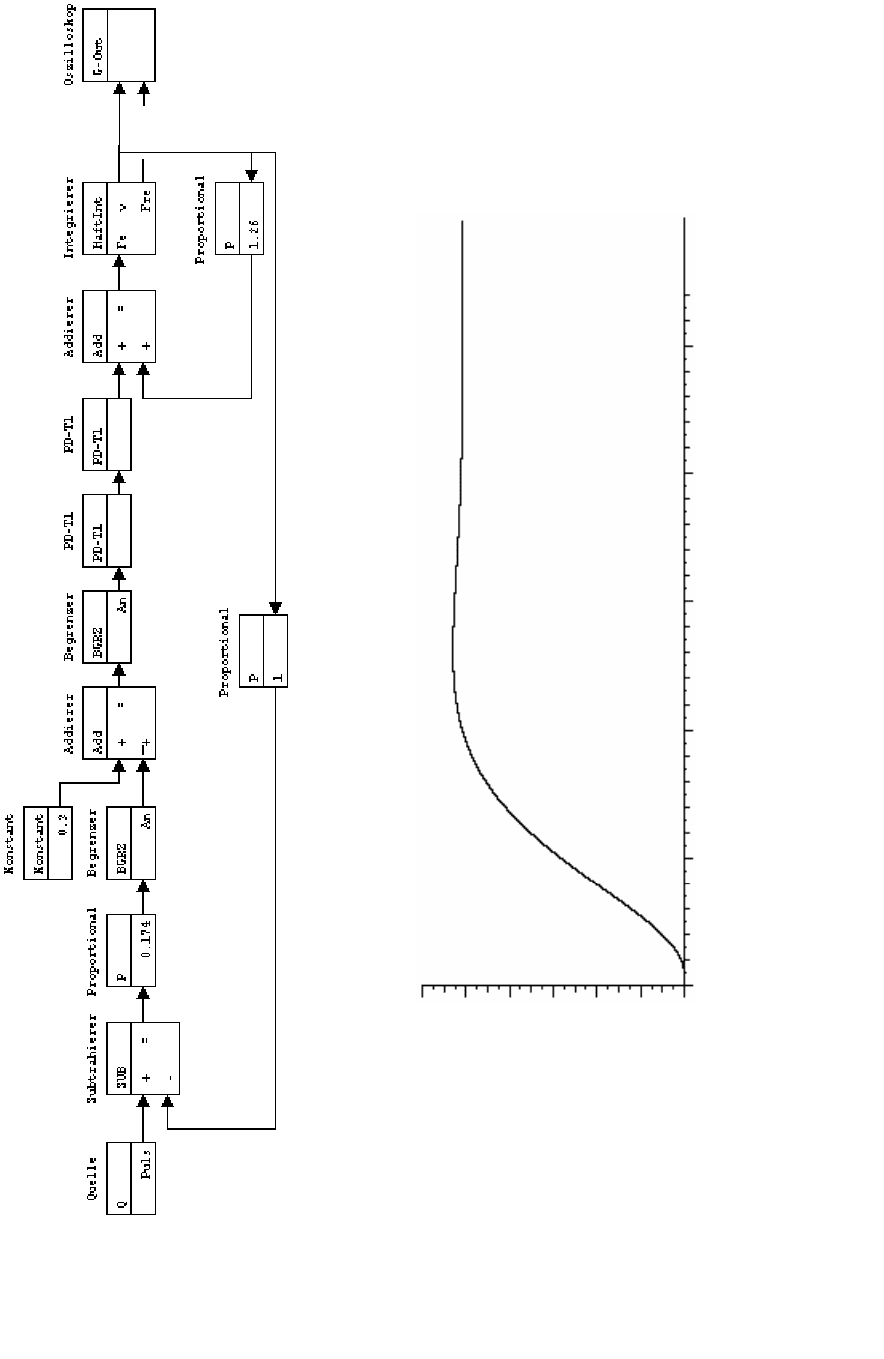
Схема имитационной модели электропривода тиристорный преоб-
разователь–асинхронный двигатель с отрицательной обратной связью
по скорости, составленная в программной среде WINDORA, приведена
на рис. 3.22.
87
Рис. 3.22. Схема имитационной модели электропривода ТРН–АД с отрицательной обратной связью по скорости
5101520250
τ
е. о.
е. о.
∗
ω
2,0
8,0
6,0
4,0
0,1
5101520250
τ
е. о.
е. о.
∗
ω
2,0
8,0
6,0
4,0
0,1
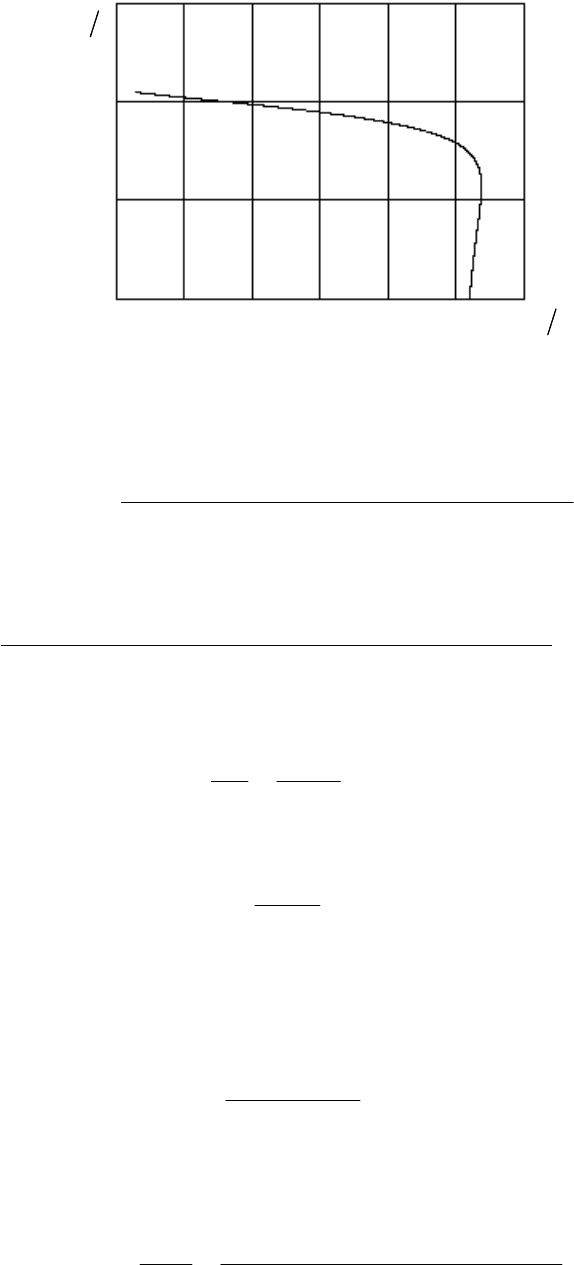
Рис. 3.23. Переходный процесс скорости при типовом скачкообразном изменении задающего напряжения
87
88
Переходный процесс скорости при типовом скачкообразном изме-
нении задающего напряжения
1
з
=
U о. е. представлен на рис. 3.23.
Анализ переходного процесса показывает, что принятые допущения при
линеаризации уравнения механической характеристики асинхронного
двигателя и расчете параметров регулятора скорости были правомерны.
Переходный процесс, рассчитанный при типовом скачкообразном
единичном воздействии задающего напряжения, практически совпадает
с желаемым типовым процессом контура, настроенного на модульный
оптимум. Однако полученный переходный
процесс справедлив только
при исследовании электропривода «в малом», то есть при незначитель-
ном отклонении управляющего воздействия от состояния равновесия.
Схема имитационной модели (рис. 3.22) не учитывает существенные
нелинейности асинхронного двигателя, поэтому она не может быть
применена с достаточной достоверностью при исследовании пуска дви-
гателя «в большом», ударном набросе и сбросе нагрузки на
валу двига-
теля и т. д. Для исследования системы «в большом» и окончательном
определении параметров электропривода ТРН–АД с отрицательной об-
ратной связью по скорости необходимо исследовать переходные режи-
мы с учетом полной модели асинхронного двигателя.
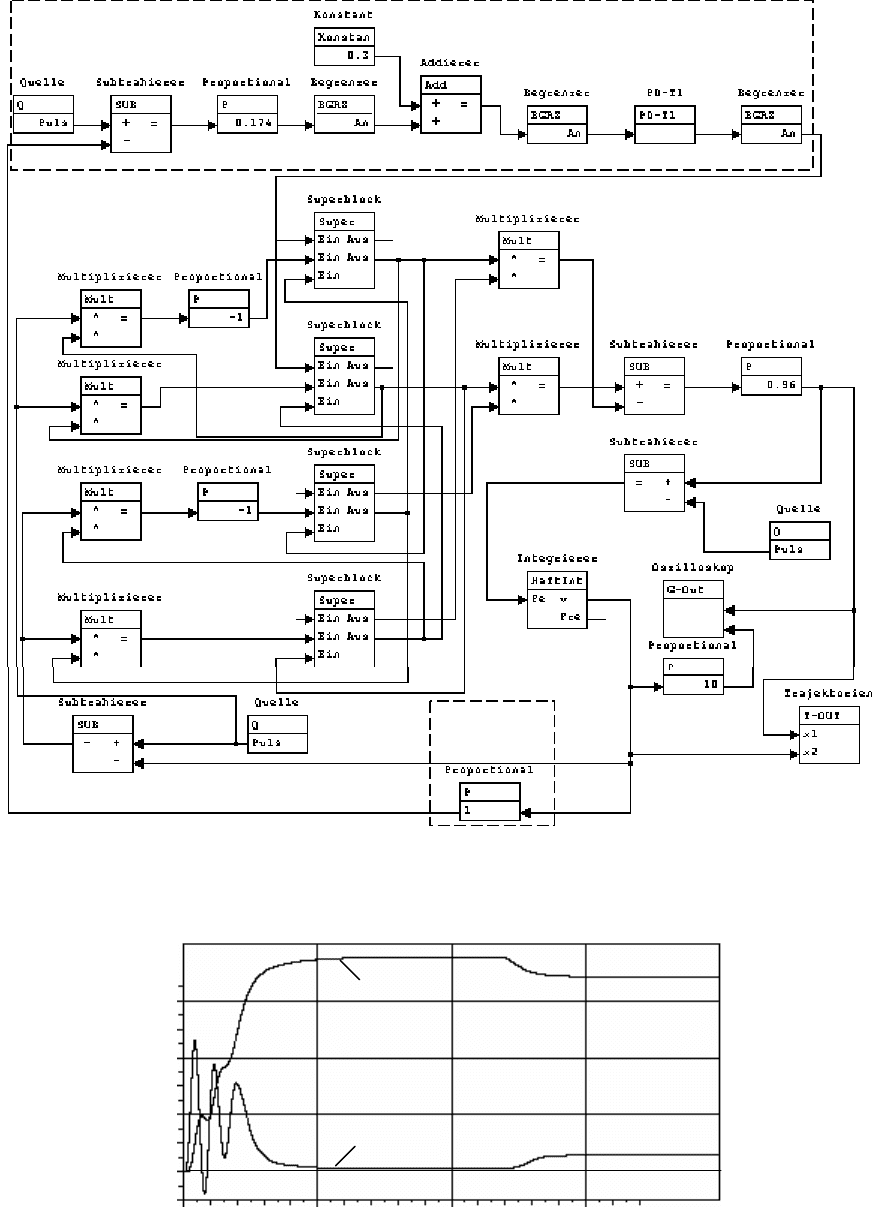
Пример 3.4. Рассчитать переходные процессы, динамические
и статические механические характеристики электропривода тири-
сторный регулятор напряжения–асинхронный двигатель с отрицатель-
ной обратной связью по скорости при задающем напряжении
В 3
з2
=U . Структурная схема электропривода приведена на рис. 3.19.
Параметры двигателя, преобразователя и системы управления принять
из условия примеров 3.2 и 3.3.
Решение.
Расчет параметров структурной схемы асинхронного
электропривода и переходных процессов будем производить в относи-
тельных единицах. Схема имитационной модели системы ТРН–АД
с отрицательной обратной связью по скорости приведена на рис. 3.24.
Динамическая модель асинхронного двигателя составлена во вращаю-
щейся системе координат. Используя вращающуюся систему координат,
возможно систему управления и двигатель описать одной
системой
уравнений, применяя аналоговые сигналы в качестве входных для эле-
ментов схемы управления и двигателя.
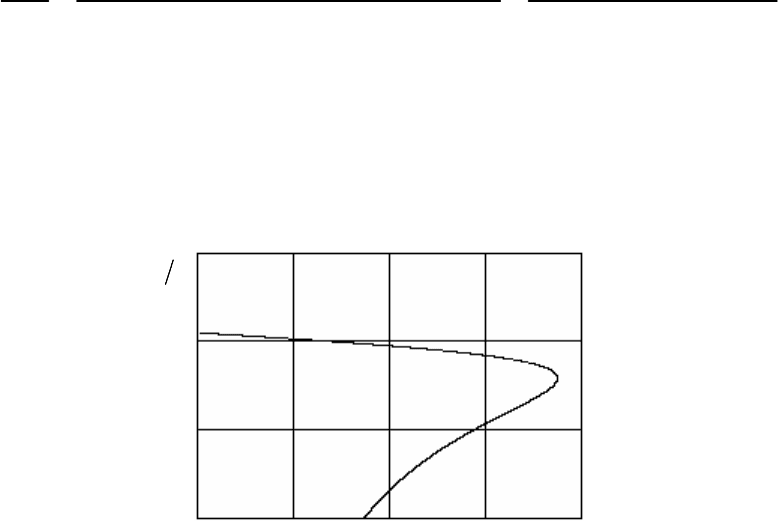
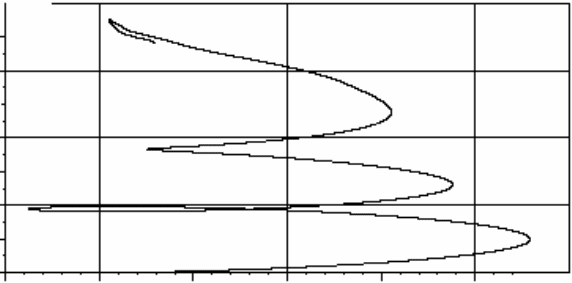
Графики переходных процессов скорости ω и момента
M
при пус-
ке электропривода ТРН–АД и последующем набросе нагрузки до
н
6,0 M
приведены на рис. 3.25 и рис. 3.27. На рис. 3.26 и рис. 3.28 построены
динамические механические характеристики. Анализ переходных про-
цессов показывает, что они существенно зависят от электромагнитных
89
Рис. 3.24. Схема имитационной модели системы ТРН–АД
с отрицательной обратной связью по скорости
τ
е. о.
50 100
1500
1−
2
4
6
01ω, ×M
е о.
()
τω f=
()
τfM =
τ
е. о.
50 100
1500
1−
2
4
6
01ω, ×M
е о.
()
τω f=
()
τfM =
Рис. 3.25. Графики переходных процессов скорости
ω
и момента
M
при пуске и набросе нагрузки в электроприводе ТРН–АД.
В 8
з
=U
Система
управления
двигатель
йАсинхронны
Датчик
скорости
90
процессов в асинхронном двигателе. При больших скачкообразных за-
дающих напряжениях (
е. о. 0,6
зс
>U ) сигнал управления регулятором
скорости
осзурс
UUU −= велик и к двигателю прикладывается полное
напряжение питающей сети, переходные процессы скорости и момента
близки к процессам в разомкнутом электроприводе при его пуске пря-
мым включением в сеть (рис. 2.17 и 2.18). При малых скачкообразных
задающих напряжениях (
е. о. 0,3
зс
<
U ) сигнал управления регулятором
скорости
урс
U также велик и к двигателю в начале пуска прикладывает-
ся повышенное напряжение. Возникают колебательные процессы мо-
мента и скорости, которые рекомендуется уменьшить увеличением
инерционности тиристорного регулятора напряжения, путем введения
в цепь управления тиристорами дополнительной инерционности [16]
и включением задатчика интенсивности на входе электропривода. Уве-
личение инерционности тиристорного регулятора напряжения достига-
ется
введением на его вход дополнительного фильтра с постоянной
времени
Т
ф
= (3÷5) · Т
трн
. Очевидно, что параметры регулятора скорости
при вводе дополнительной инерционности необходимо пересчитать.
Эти меры позволяют улучшить качество переходных процессов, сни-
зить влияние свободных составляющих момента и обеспечить отработ-
ку управляющих сигналов с минимальными перерегулированиями мо-
мента и скорости, однако точность поддержания скорости уменьшится,
так как уменьшится коэффициент усиления регулятора скорости.
M
е. о.
е. о.
ω
1−
0
24
2,0
4,0
6,0
M
е. о.
е. о.
ω
1−
0
24
2,0
4,0
6,0
Рис. 3.26. Динамическая механическая характеристика
при пуске и набросе нагрузки в электроприводе ТРН–АД.
В 8
з
=U