Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

262 THE VECTOR SPACE MODEL: THE ALGEBRA OF DIRECTIONS CHAPTER 10
•
Optimal translation t
j
given R
j
, σ
ij
,X
i
, and the data x
ij
. This involves differentiation
of the cost function relative to t
j
. The zero derivative is attained at
t
j
=
1
N
N
i=1
X
i
− R
j
σ
ij
x
ij
R
j
.
(10.16)
This is simply the average difference of where camera j would reconstruct the points
based on its presumed rotations and their true average location.
•
Optimal rotation R
j
given X
i
and the data x
ij
. The differentiation with respect to
a rotor was treated in Section 8.7.2 when optimizing (8.16). Here the result corre-
sponding to (8.17) is that the optimal R
j
must satisfy
N
i=1
(X
i
− t
j
) ∧ (R
j
σ
ij
x
ij
R
j
)
= 0.
The geometrical interpretation is that the optimal rotor rotates to minimize the
transverse components of all X
i
when reconstructed by camera j. Substituting the
expression for the optimal t
j
leads to
N
i=1
(X
i
− X
) ∧ (R
j
σ
ij
x
ij
R
j
)
= 0, (10.17)
where X
≡
1
N
N
k=1
X
k
is the centroid of the world points. As in Section 8.7.2, this
optimal R can be found by a singular value decomposition of a linear function
defined in terms of the other parameters.
•
Optimal scaling σ
ij
given R
j
, t
j
,X
i
, and the data x
ij
. This requires scalar differenti-
ation of Γ, and results in
σ
ij
= (X
i
− t
j
) · (R
j
x
−1
ij
R
j
). (10.18)
This is almost a division of the estimated X
ij
by the rotated x
ij
, except that the inner
product makes only the parts along the ray contribute (so that a scalar results).
•
Optimal world points given t
j
, R
j
, σ
ij
, and the data x
ij
. Setting the vector derivative
of Γ with respect to X
i
to zero yields
X
i
=
1
M
M
j=1
(t
j
+ R
j
σ
ij
x
ij
R
j
).
(10.19)
This is simply the average of the estimations of the location of world point i by
each camera.
SECTION 10.5 CONVENIENT ABUSE: LOCATIONS AS DIRECTIONS 263
•
Optimal world points X
i
given t
j
, R
j
, and the data x
ij
.Theoptimumforσ
ij
of
(10.18) can be substituted in (10.19) to find a system of linear equations for X
i
using R
j
, t
j
, and the data x
ij
. That system can be solved optimally by a least squares
technique.
•
Optimal translations t
j
given R
j
and the data x
ij
. Another substitution of (10.18)
and combination with the result for the X
i
leads to a system of homogeneous linear
equations for the t
j
using an estimate of the R
j
and the data x
ij
. That system can be
solved optimally using an SVD.
With these composite results, the following iterative scheme can be formulated:
1. Make an initial guess of the R
j
based on the data using a standard stereo vision algo-
rithm (the geometrical basis for such algorithms will be explained in Section 12.2).
2. Estimate the t
j
using the estimate of R
j
and the data x
ij
.
3. Estimate the world points X
i
using R
j
, t
j
, and the data x
ij
.
4. Estimate the scaling σ
ij
using (10.18).
5. Obtain a new estimation for R
j
using (10.17) and iterate from step 2.
The authors of [38] report that a dozen or so iterations are required for convergence
(depending on the number of cameras). The resulting calibration algorithm is fully linear.
In modern calibration practice, it is customary to use the outcome of such linear algo-
rithms as an initial estimate for a few steps of subsequent nonlinear optimization to
improve the estimation.
This algorithm is the basis of the programming example of Section 10.7.3. The com-
pact and direct derivation of the partial solution formulas (10.16) through (10.19) are an
exemplary usage of geometric algebra for these kinds of geometrical optimization prob-
lems in the vector space model.
10.5 CONVENIENT ABUSE: LOCATIONS
AS DIRECTIONS
The vector space model is the natural model to compute with directions and the ultimate
tool for this purpose. It will remain clearly recognizable as a submodel providing the alge-
bra of Euclidean directions, even as we move on to more sophisticated models in the next
chapters.
In a purist point of view, the vector space model would not be used for other tasks. Yet
we can, of course, model location in the vector space model, in the same way as it has
always been done in elementary linear algebra. We just view a location as obtained by
traveling in a certain direction denoted by a direction vector p, over a distance given by
its norm. This treats a direction vector as a position vector, and particularly for problems
264 THE VECTOR SPACE MODEL: THE ALGEBRA OF DIRECTIONS CHAPTER 10
only involving point objects, it is not bad practice. The calibration example of the pre-
vious section shows that it can be very effective, and since that is a problem in which
locations are actually observed as directions, the vector space model is in fact its natural
setting.
When you also have geometrical elements other than pure directions (such as line or
plane offset from the origin), you run into the familiar problems that the use of classical
linear algebra also entailed: translations of such elements require administration of object
types and corresponding data structures. For instance, you can characterize a line by a
position vector and a direction vector, but you should keep them clearly separate, for
under a translation over a vector t, the position needs to change but the direction should
not. Uniformity is only obtained by having a single algebraic element representing the
line, with a representation of translation that can operate on it directly. The vector space
model does not provide that in a structural manner. You need to encode this structure
explicitly or use at least the homogeneous model.
Examples of the “convenient abuse” of directions as locations abound in all graphics
and robotics literature, as well as in typical physics textbooks. Hestenes [29] shows how
geometric algebra can be used effectively in the vector space model to do all of classical
physics. The vector space model does not lack computational power, and its rotors help
considerably in simplifying classical problems like the orbits of planets in a gravitational
field (which involve locations, but viewed from the sun so that their directional treatment
becomes natural). But this computational power can only be wielded by manually keeping
track of what geometry is represented by each element and which operations are permit-
ted to be performed on it. That is less a problem for physics (which tends to connect its
equations by natural language anyway), but it is a major source of programming errors in
computer graphics (as reported in [23, 44]). The models of the next chapters will provide
alternatives in which a more extended algebra is used to perform simultaneously both the
computations and the bookkeeping of geometrical elements.
10.6 FURTHER READING
The vector space model may seem prevalent in almost all linear algebra texts, since it is
the most basic way to treat geometry with vectors. However, in geometric algebra, the
full vector space model naturally includes blades and rotors. Not many texts incorporate
those in their treatment of basic geometry.
Your best background material for advanced use of the vector space model of geometric
algebra are texts in introductory physics (such as [29] and [15]). For current use in prac-
tical problems, the papers using geometric algebra in professional journals on computer
vision and robotics are your best source, though these increasingly use the more powerful
conformal model to address problems involving direction and location.
SECTION 10.7 PROGRAMMING EXAMPLES AND EXERCISES 265
10.7 PROGRAMMING EXAMPLES AND EXERCISES
10.7.1 INTERPOLATING ROTATIONS
Interpolating rotations is an important problem with many applications. It is straightfor-
ward to implement once you are able to compute the logarithm of a rotor. This can be
implemented as follows (see Section 10.3.3):
bivector log(const rotor &R) {
// get the bivector/2-blade part of R
bivector B = _bivector(R);
// compute the ’reverse norm’ of the bivector part of R:
mv::Float R2 = _Float(norm_r(B));
// check to avoid divide-by-zero
// (and also below zero due to FP roundoff):
if (R2 <= 0.0){
if (_Float(R) < 0) {
// the user asks for log( — 1)
// we return a 360 degree rotation in an arbitrary plane:
return _bivector((float)M_PI * (e1 ^ e2));
}
else
return bivector(); // return log(1) = 0
}
// return the log:
return _bivector(B * ((float)atan2(R2, _Float(R)) / R2));
}
When you look for this function in the GA sandbox source code package, note that it
resides in the file
e3ga_util.cpp in the libgasandbox directory and not in the main
source file of this example. The same is true for the
exp() function listed below. This
exp() is a specialization of the generic exponentiation algorithm, as described in Sec-
tions 7.4 and 21.3.
rotor exp(const bivector &x) {
// compute the square
mv::Float x2 = _Float(x << x);
// x2 must always be <= 0, but round off error can make it
// positive:
if (x2 > 0.0f) x2 = 0.0f;
// compute half angle:
mv::Float ha = sqrt( — x2);
266 THE VECTOR SPACE MODEL: THE ALGEBRA OF DIRECTIONS CHAPTER 10
if (ha == (mv::Float)0.0) return _rotor((mv::Float)1.0);
// return rotor:
return _rotor((mv::Float)cos(ha) +
((mv::Float)sin(ha) / ha) * x);
}
Now that we can go back and forth between rotor and bivector representations of rota-
tions, interpolating rotations becomes straightforward: given two rotors
src and dst,we
first compute their difference as the ratio
inverse(src) * dst. Then we compute the
log() of the difference, and scale by the interpolation parameter alpha (which will run
from 0 to 1). The final step is reconstructing the rotor using
exp(), and putting it back
in the original frame by multiplying with
src:
rotor interpolateRotor(const rotor &src, const
rotor &dst, mv::Float alpha) {
// return src * exp(alpha * log(inverse(src) * dst));
return _rotor(src * exp(_bivector(alpha *
log(_rotor(inverse(src) * dst)))));
}
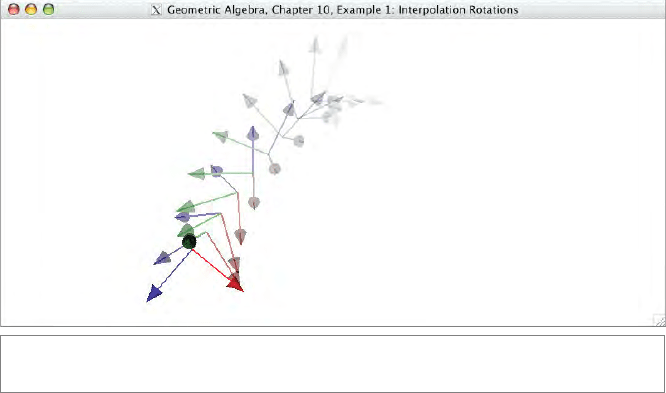
The example uses this code to display a rotating/translating frame with a trail following
behind it, as seen in Figure 10.5. Interpolation of translations is done the classical way:
e3ga::vector interpolateVector(
const e3ga::vector &src, const e3ga::vector &dst,
mv::Float alpha) {
return _vector((1.0f — alpha) * src + alpha * dst);
}
Figure 10.5: Interpolation of rotations (Example 1).
SECTION 10.7 PROGRAMMING EXAMPLES AND EXERCISES 267
In later examples—when we gain the additional ability to represent translation and
scalings as rotors—we will redo this example. Only the
log() and exp() functions will
change; the interpolation function remains essentially the same (see Sections 13.10.4 and
16.10.3).
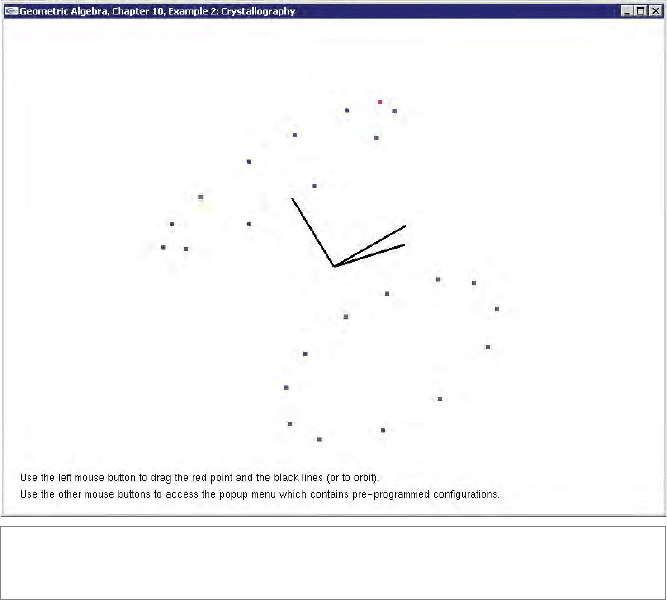
10.7.2 CRYSTALLOGRAPHY IMPLEMENTATION
We have made an implementation to play with the vectors generating symmetries of crys-
tal lattices. An example of the output is Figure 10.6. The application works for the point
groups in 3-D. It shows three input vectors a, b, c drawn as black line segments, which are
the basic generators of the symmetry operators from Section 10.2.3. You can drag those
around to investigate possible nearby symmetries.
The operators are computed from the initial generators in a brute force manner, by repeat-
edly multiplying them with each other to make new versors until no new symmetry oper-
ators are found. To get a true point group, a, b, and c should be chosen in particular ways,
Figure 10.6: Crystallography (Example 2). This example shows the 24 symmetries of a
hexagonal crystal generated from a single red point.
268 THE VECTOR SPACE MODEL: THE ALGEBRA OF DIRECTIONS CHAPTER 10
and for some should be considered as composite operators like (ac). If the generators are
not in the proper configuration to generate a point group, their combination may lead
to an infinite number of versors, but we arbitrarily cut off the generation at 200 different
versors. The largest true point group of cubic symmetry has 48 operators.
To draw the point groups, the code applies the operators to a single (draggable) input
point. A popup menu can be used to initialize the vectors to preprogrammed configu-
rations (cubic, hexagonal, tetragonal, orthorhombic, triclinic, monoclinic, and trigonal),
corresponding to the seven main point groups. For more details on how to generate all
the subgroups (32 in total), consult [30].
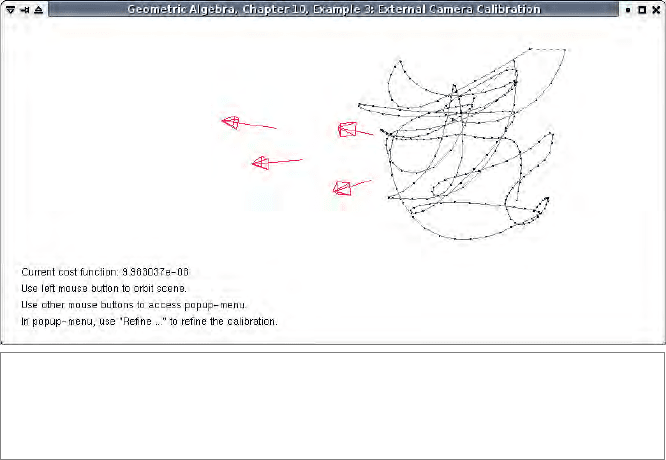
10.7.3 EXTERNAL CAMERA CALIBRATION
This example implements the external calibration of [38], as summarized in Section 10.4.2.
It assumes that the cameras have already been calibrated internally (we used the method
of Zhang [63]), and that we have an initial external calibration (we used the 8-point algo-
rithm, see e.g., [25]).
The data provided with the example is actual calibration data from a geometric-algebra-
based motion capture system built by the authors. The data contains the initial 8-point
calibration estimation, but we have deliberately decreased the quality of the initial esti-
mation to make the effect of the refinement more pronounced. Figure 10.7 shows the
reconstruction of the markers seen by the cameras after completion of the calibration.
Figure 10.7: External camera calibration (Example 3). The cameras are drawn as red wire-
frame pyramids (view volume) with a line indicating their viewing direction. The marker points
used for calibration are drawn as black dots. A line connects the marker points to show how
the single marker was waved through the viewing volume of the cameras.
SECTION 10.7 PROGRAMMING EXAMPLES AND EXERCISES 269
To implement (10.16) through (10.19), we first need some context. The data is kept in a
class
State. This state contains cameras in array m_cam, and 3-D world points in array
m_pt:
class State {
public:
// ... (constructors, etc)
// the cameras
std::vector<Camera> m_cam;
// the reconstructed markers, for each frame
std::vector<e3ga::vector> m_pt;
// is reconstruction of markers valid?
std::vector<bool> m_ptValid;
};
The reconstruction of a marker is invalid when it is visible to only one camera.
Each camera carries its own 2-D marker measurements (
m_pt), rotation (m_R and m_Rom),
translation (
m_t), scaling σ
ij
(m_sigma), and per-marker visibility (m_visible).
(We ignored visibility issues when we explained the algorithm, but it is included in [38]
and implemented in the code.)
class Camera {
public:
// ... (constructors, etc)
// rotation
rotor m_R;
// rotation matrix
om m_Rom;
// translation
e3ga::vector m_t;
// for each frame, is a marker visible?
std::vector<bool> m_visible;
// for each frame, the ’2D’ point in the image plane
// (normalized image coordinates, i.e., the e3 coordinate = — 1)
std::vector<e3ga::vector> m_pt;
// for each frame the estimated multiplication factor of m_pt
std::vector<mv::Float> m_sigma;
};
Now each of the equations in Section 10.4.2 can be implemented and those functions
combined in the total algorithm. As an example, (10.16) leads to the code:
270 THE VECTOR SPACE MODEL: THE ALGEBRA OF DIRECTIONS CHAPTER 10
void State::updateTranslation() {
// Iterate over all cameras
// (start at ’1’ because translation of first camera is always 0)
for (unsigned int c = 1; c < m_cam.size(); c++) {
Camera &C = m_cam[c];
vector sum;
int nbVisible = 0;
for (unsigned int i = 0; i < m_pt.size(); i++) {
if ((C.m_visible[i]) && m_ptValid[i]) {
sum += _vector(m_pt[i] - C.m_sigma[i] *
(apply_om(C.m_Rom, C.m_pt[i])));
nbVisible++;
}
}
C.m_t = sum * (1.0f / (mv::Float)nbVisible);
}
}
Note that for efficiency we use the outermorphism matrix representation of the rotor to
apply it to vectors by means of the function
apply_om(). You can consult the rest of the
code in the GA sandbox source code package.
We will encounter the motion capture system again in Section 12.5.3, when we reconstruct
3-D markers from the raw 2-D data.
11
THE HOMOGENEOUS
MODEL
While the 3-D vector space model can nicely model directions, it is usually considered
to be inadequate for use in 3-D computer graphics, primar ily because of a desire to treat
points and vectors as different elements that are transformed differently by translations.
Instead, people commonly use an extension of linear algebra known as homogeneous coor-
dinates. This is often described as augmenting a 3-D vector v with coordinates (v
1
,v
2
,v
3
)
T
to a 4-vector ( v
1
,v
2
,v
3
,1)
T
. This extension makes nonlinear operations such as translations
implementable as linear mappings.
For the homogeneous model in geometric algebra, the modeling principle is the same: we
embed our n-dimensional base space
R
n
(which you may think of as Euclidean R
n,0
,tobe
specific) in an (n + 1) -dimensional representational vector space
R
n+1
,ofwhichwethen
use the inherent algebra. That produces a complete algebraic framework, which is well
suited to compute with oriented flats, subspaces offset from the origin in
R
n
represented
as blades in
R
n+1
.
The algebra of
R
n+1
provides generally applicable formulas for translation, rotation, and
even affine and projective transformations in the base space
R
n
. The operations of meet
and join always return sensible results for incidences of flats. For instance, for two parallel
lines the
meet returns the common direction of the lines as a point at infinity weighted by
their mutual distance. We derive useful covariant and invariant measures, including the
projectively invariant cross ratio, in terms of geometric algebra.
271