Dorst L., Fontijne D., Mann S. Geometric Algebra for Computer Science. An Object Oriented Approach to Geometry
Подождите немного. Документ загружается.

442 CONSTRUCTIONS IN EUCLIDEAN GEOMETRY CHAPTER 15
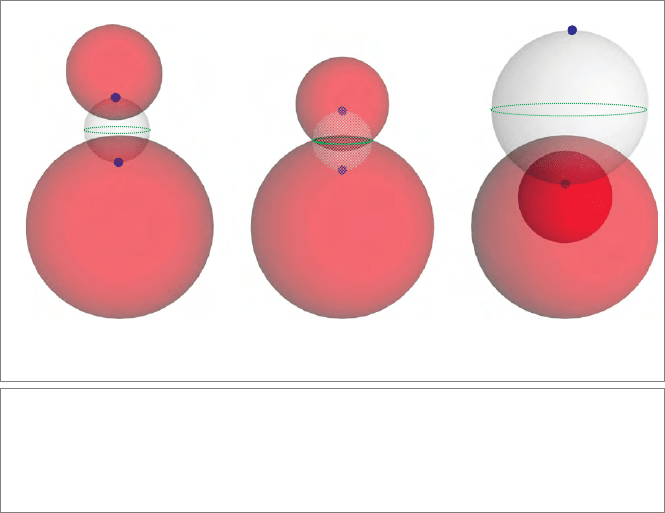
(a) (b) (c)
Figure 15.3: The meet and plunge of two spheres at increasing distances. When they do
not intersect (a,c), the red dual spheres have a real
plunge and an imaginary meet. When
they do intersect (b), the
meet is real and the plunge imaginary. In all cases meet and
plunge are each other’s dual (i.e., polars on the three white spheres). Imaginary elements
are depicted as speckled.
15.1.4 THE PLUNGE OF FLATS
The construction of a general flat p ∧ E ∧∞can also be interpreted as a plunge.Asa
definite example, let us interpret the line p∧u∧∞. According to the
plunge construction,
this should perpendicularly intersect the points p and ∞ (so that it contains them), and
it should moreover be perpendicular to u
∗
, which is the plane through the origin with
normal vector u. Obviously, this
plunge must then be the direct representation of the
line through p in the u direction. This is illustrated in Figure 15.4(a). Including another
Euclidean vector factor v gives an element that should meet the dual line u ∧ v perpen-
dicularly, and is therefore the direct representation of a plane. Removing the Euclidean
factor (by setting it equal to the 0-blade 1) gives the representation of a flat of dimension
zero (i.e., a direct flat point p ∧∞, which is the element that perpendicularly connects the
small dual sphere p with the point at infinity ∞).
Now let us revisit the object p(c ∧∞) from (14.4), which contains such a flat point in
its construction. It was a dual sphere through the point p, with center c. Undualizing this,
we find that it is the direct object
S = p ∧ (c ∧∞)
−∗
.

SECTION 15.1 EUCLIDEAN INCIDENCE AND COINCIDENCE 443
p
(a) (b)
u
p
c
Figure 15.4: (a) The plunge construction of the line p ∧ u ∧∞. (b) Visualization of the point
c ∧∞and its consistency with constructing the dual sphere p(c ∧∞), given a point p.
We see that this indeed contains p (it plunges into p since it is a direct representation of
the form p∧), and that we should think of it as also plunging into the flat point c ∧∞.We
have just seen that such a flat point in itself is the
plunge of c and ∞, connecting those two
dual elements. We observe that we get an intuitively satisfying picture like Figure 15.4(b),
in which the flat point c ∧∞has “hairs” extending from c to infinity. Intersecting all of
those perpendicularly while also passing through the given point p must produce a sphere.
Carrying this type of thinking to its logical extreme, we can also interpret a purely
Euclidean blade such as v ∧ u as a direct element of our geometry. Since it is a purely
Euclidean 2-blade, we have already met it as the dual representation of the line that is the
meet of the two dual planes u and v passing through the origin. But if we interpret v ∧ u
directly, it should be the
plunge of the two planes represented dually by u and v (i.e., the
general element that is perpendicular to both).
Any cylinder with their common line as its axis is a solution, so this is like a nest of cylin-
ders of arbitrary radius but fixed axis. However, as soon as we try to pick out one of the
cylinders by specifying a point p on it, the element p ∧ (v ∧u) is a unique circle.Soamore
accurate description is that v ∧ u represents a stack of nests of circles. But that is also not
quite right, since these elements are not circles yet (we have specified only a grade 2 object,
not grade 3); rather, v ∧ u is a stack of nests of potential circles. This may seem like an
uncommon object, until you realize that a rotation rotor can be made from this dual line
L
∗
= v ∧ u as exp(α v ∧ u). Then the element L
∗
= v ∧ u in fact describes a collection of
444 CONSTRUCTIONS IN EUCLIDEAN GEOMETRY CHAPTER 15
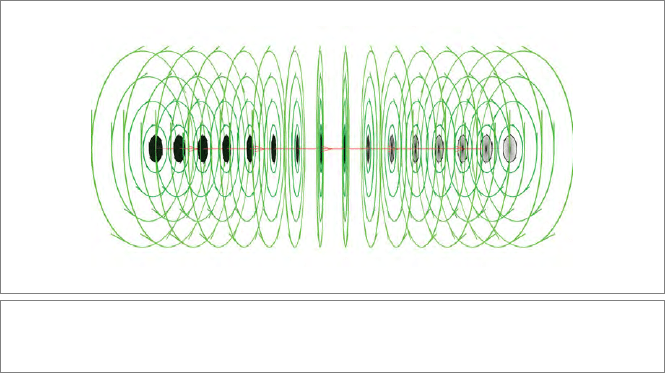
Figure 15.5: The circular orbits of a line L, which are p ∧ L
∗
for various points p. The orbits
of points on the line are tangent bivectors, depicted as small oriented disks.
orbits of the rotating points, as indicated in Figure 15.5 (in which the actual orbits p ∧ L
∗
are drawn).
The point of all this discussion is that the conformal model suggests, in its algebraic coher-
ence, a consistent and rich language for Euclidean geometry. It contains objects that we
have not seen this explicitly before, but that on closer scrutiny represent familiar geomet-
ric concepts, and endows them with precise computational properties. Now that we have
an algebraic way to combine them, it pays to try and get them into more practical form
into our intuition, so that we can use them as active concepts in the solution of problems.
This takes practice, and we recommend playing with interactive software packages like
GAViewer to absorb this into your intuition—the old-fashioned derivations on paper are
rather useless for this (though they should be used to check and/or prove the correctness
of your new insights).
15.2 EUCLIDEAN NUGGETS
When you work with the conformal model in a practical application, you will find that you
often need to convert elements, and that certain operations appear to be useful nuggets,
occurring again and again. We provide some in this section, and try to discern some pat-
terns. This is certainly not a complete inventory of such elementary constructions. We
hope that the techniques we expose in deriving them will give you the skills to derive your
own special expressions, should your application require them.

SECTION 15.2 EUCLIDEAN NUGGETS 445
15.2.1 TANGENTS WITHOUT DIFFERENTIATING
When you need the tangent to a flat Π or to a round Σ passing through one of its points p,
you can compute this without differentiation. Calling the element X (so that p ∧ X = 0),
its tangent is
tangent to X at p: p
X
(15.1)
The tangents are illustrated in Figure 15.6.
The formula is easy to prove for a flat through the origin: o(o ∧ E ∧∞)= o ∧ E, and
because of Euclidean covariance, this holds everywhere for any flat. For a round the proof
is also most simply done at the origin o. A direct round through o with center c and direc-
tion E ∞is o∧
c(−
E ∞)
, according to structural exercise 4. Then the proposed formula
(15.1) gives, by straightforward computation, that the tangent equals o ∧ (cE),whichis
the correct result in its geometrical aspects: its directional part is an element of the carrier
E, perpendicular to the radial vector. Note that this local tangent blade is weighted by the
magnitude of the radial vector c, which is the radius ρ. The occurrence of ρ (rather than
ρ
2
) may seem to require complex numbers for imaginary rounds. However, imaginary
rounds contain no real points, so they have no real tangents either.
15.2.2 CARRIERS, TANGENT FLAT
Let us define the carrier of an element as the smallest grade flat that contains it. A flat is
therefore its own carrier. The carrier of a round Σ (which may be a tangent) is
carr ier of round Σ: Σ ∧∞.
This is easily proved:
(c +
1
2
ρ
2
∞) ∧ E
∧∞= c ∧ E ∧∞.
We can use this to compute the tangent flat to an element X at one of its points p as
(p
X ) ∧∞. This applies to rounds and flats alike; though for a flat it is the identity.
Tangents do not have tangent flats, though they do have a carrier.
p ⎦ K
∧
⎦ Λ
∧
p ⎦ ∑
∧
p ⎦ ∏
∧
p
Figure 15.6: The tangents of flats and rounds at one of their points are simply computed
by the contraction. No differentiation is required.

446 CONSTRUCTIONS IN EUCLIDEAN GEOMETRY CHAPTER 15
15.2.3 SURROUNDS, FACTORIZATION OF ROUNDS
A round Σ can be surrounded by the smallest sphere containing it. In its dual
representation, that surround of Σ is
surround of round Σ:
Σ
Σ ∧∞
, (15.2)
in which the division denotes right division (i.e., Σ (Σ ∧∞)
−1
). This even applies to
tangents, but it then returns the locational point of the tangent, in agreement with the
intuition that a tangent has zero size. Formula (15.2) can be interpreted as the dual of Σ
relative to the carrier of dimension k; therefore the expression equals (c −
1
2
ρ
2
∞)(−1)
k
,
which is a dual sphere containing Σ. We prove the surround formula below.
If the round Σ is given in its dual form, you need the dual of (15.2):
surround of dual round σ: (−1)
k
σ
∞σ
. (15.3)
The signs ensure that the computed surround is the same as before, but you could ignore
them.
A round can be factored as the geometric product of its surround and its carrier:
factorization of a round Σ: Σ=
Σ
Σ ∧∞
(Σ ∧∞), (15.4)
and its dual is
factorization of a dual round σ: σ =
σ
∞σ
(∞σ), (15.5)
in which you need to include the (−1)
k
(as in (15.3)) if you need the proper orienta-
tion of the surround. These unique factorization formulas are the motivation behind the
expression for the surrounding sphere. It is easy to show that the center of the surround-
ing sphere is in the carrier plane; and then (15.4) actually represents the perpendicular
meet of carrier and surround. This makes the factorization geometrically very natural
(see Figure 15.7). Algebraically, this factorization in orthogonal factors is important in
symbolic simplification of formulas involving rounds. Given a round like a circle, such
a factorization gives us a better understanding of it: the carrier plane gives us direction,
weight, and orientation of the circle, and the sphere gives us its location (i.e., center) and
size (i.e., radius squared).
A special case is a point pair, for which the same formulas hold, for it is clearly also a round.
Now Σ ∧∞represents the carrier line, and division again gives the containing sphere, as
shown in Figure 15.7. The result is an expression for the smallest sphere containing two
points:
p ∧ q
p ∧ q ∧∞
=
(p ∧ q)(p ∧ q ∧∞)
−2p · q
= −
1
2
p + q + (p · q)∞
.
SECTION 15.2 EUCLIDEAN NUGGETS 447
Figure 15.7: The factorization of rounds, using their carrier and surround. A point pair P is
factorized as the intersection of its surrounding dual sphere P/(P ∧∞) and the carrier line P∧∞.
A circle K is factorized as the intersection of the dual surrounding sphere K/(K ∧∞) and the
carrier plane K ∧∞.
The overall sign in this makes the meet correct, but you can ignore it if you are not inter-
ested in such matters of orientation.
For the proof of the correctness of the surround formula (15.2), we need to show that the
center of the surround is in the carrier plane. So we reflect the surround in that plane and
verify that this merely changes the surround by a sign. Using the reflection formula for a
dual element into a directly represented mirror (from Table 7.1), we find that the deriva-
tion is quicker when we reflect in the inverse of the carrier (which makes no difference
geometrically). We obtain
(Σ ∧∞)
−1
Σ (Σ ∧∞)
−1
(Σ ∧∞) = (Σ ∧∞)
−1
Σ=
Σ (Σ ∧∞)
−1
,
so that this dual sphere becomes a signed multiple of itself (in the final transition, we took
the reverse and computed the resulting sign, after realizing that the reverse of a vector is
the vector itself). It follows that the center of the sphere is on the mirroring carrier. As a
consequence, the outer product of the dual surround sphere with the carrier must be zero;
therefore you can replace the geometric product in (15.4) with a contraction, showing
clearly that it expresses a
meet of the carrier with the surround (in that order).
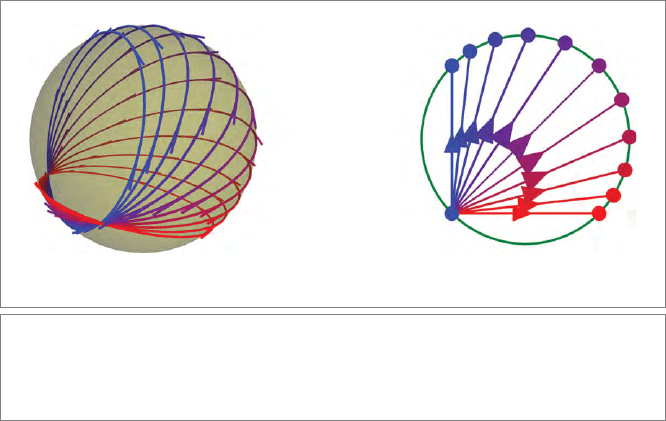
15.2.4 AFFINE COMBINATIONS
An affine combination of two normalized points gives a 1-parameter family of normalized
dual spheres (so not of points!):
λ p + (1 − λ) q.
(15.6)
The corresponding dual spheres are depicted in Figure 15.8 for the 2-D case. As λ becomes
infinite, the dual sphere approaches the midplace p − q (with enormous weight).
448 CONSTRUCTIONS IN EUCLIDEAN GEOMETRY CHAPTER 15
These dual spheres all intersect the smallest dual sphere through p and q orthogonally, as
you may easily verify:
λ p + (1 − λ) q
1
2
(p + q) +
1
2
(p · q) ∞
= 0.
Their radius squared is −λ(1 − λ) d
2
E
(p, q ), so that imaginary dual spheres result for 0 <
λ < 1. (Those imaginary dual spheres do not look orthogonal to the smallest containing
sphere in Figure 15.8, but their inner product with it is indeed zero.) Comparing this
to the treatment in the homogeneous model where this affine combination is used in
Section 11.2.3 to obtain the points between p and q, we find that the centers of the resulting
dual spheres certainly behave exactly like the locations in the affine interpolation, though
they are surrounded by imaginary dual spheres for the values of interest. To mimic that
interpolation precisely within the conformal model, you should interpolate flat points
rather than zero-radius dual spheres: λ (p ∧∞) + (1 − λ)(q ∧∞) is the flat point at
location λ p + (1 − λ) q.
Within the conformal model, other affine combinations become feasible. The affine com-
binations of flats are a simple extension of those seen in the homogeneous model in
Section 11.2.3 and require little explanation. As there, 3-D lines can only be added if they
have a finite point in common, which implies in the conformal model that they have
two points in common, one of which is the point at infinity. Two circles K
1
and K
2
can
now also be affinely combined, but like lines only if they have a point pair in common
(which may be imaginary, as it usually is for two circles in a common plane); their sum
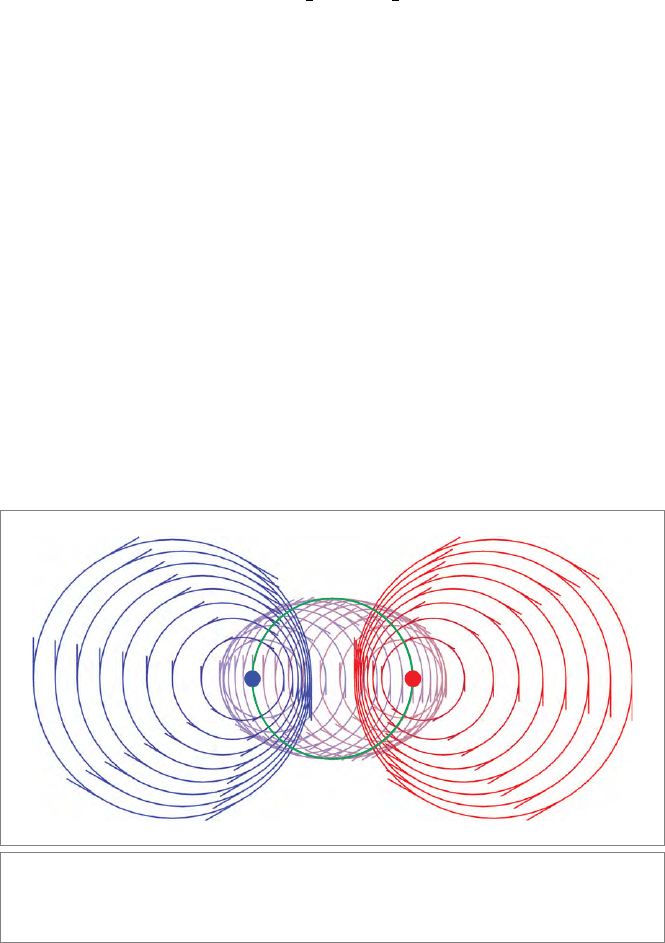
Figure15.8: Affine combinations of the point p (red) and q (blue) in the plane are dual circles.
The amount of each point is indicated by the color mixture. Imaginary circles result for some
values; they have been dashed, and their centers follow the regular affine interpolation.
SECTION 15.3 EUCLIDEAN PROJECTIONS 449
(a) (b)
Figure 15.9: Affine combination of circles (a) and point pairs (b). These only generate other
objects if they form a 1-parameter family, which implies that they should have a point pair or
point in common, respectively. We show equal increments of the affine parameter to demon-
strate its nonlinear relationship to angles or arcs.
then sweeps out circles on the common sphere K
1
∪ K
2
also containing the point pair, as
illustrated in Figure 15.9(a). Similarly, two point pairs can be combined affinely if they
have one point in common, and the results are point pairs that sweep out the circle that
is their
join, illustrated in Figure 15.9(b).
All these additive combinations transform covariantly, so they are geometrically sensible
constructions. But you should avoid using them, for they parameterize the intermediate
elements awkwardly. It is much more preferable to use the two generative elements to
produce a rotor that affects the transformations; its parameters can be directly interpreted
as angles and scalings of the intermediate elements. We develop that technique in the next
chapter.
15.3 EUCLIDEAN PROJECTIONS
In geometric algebra, the projection of a blade X onto a blade P is another blade:
X → (XP)/P, (15.7)
where the division uses the geometric product. Applying this to the conformal model, we
find the expected projection behavior if X is a flat (as we will show below when discussing
Figure 15.10(b)).
But when X is a round, this is not the projection you might expect. For instance, consider
Figure 15.10(a), the projection of a circle onto a plane. You may have hoped for an ellipse,
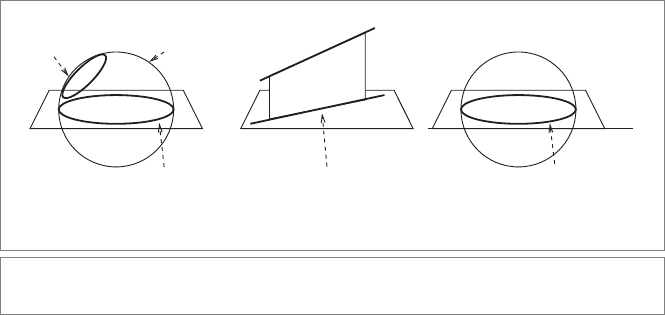
450 CONSTRUCTIONS IN EUCLIDEAN GEOMETRY CHAPTER 15
but an ellipse is not represented by a blade in our model, and therefore cannot be the
outcome of (15.7). Instead, the result of the projection of a circle onto a plane is a partic-
ular circle. To explain this effect, and derive precisely which circle, we recall (11.17):
A ∩ (X ∧ A
−∗
) = (X ∧ A
−∗
)
∗
A = (XA)A.
So the projection is proportional to the
meet of A with X ∧ A
−∗
(by the magnitude A
−2
).
In our Euclidean situation, the latter is the
plunge of X into A: it contains X and inter-
sects A perpendicularly. In the case of projecting a circle onto a plane, we indeed get the
construction of Figure 15.10(a), resulting in a circle that is the equator of the sphere that
plunges into the plane and contains the circle C.
It is instructive to see what happens for flats, for instance when X is a line L and A a plane
Π as in Figure 15.10(b). Now L ∧ Π
∗
is the plane containing L perpendicular to Π, which
is itself a flat. Therefore the
meet with Π now produces the expected line onto the plane
that is the orthogonal projection of the line onto the plane in the usual sense.
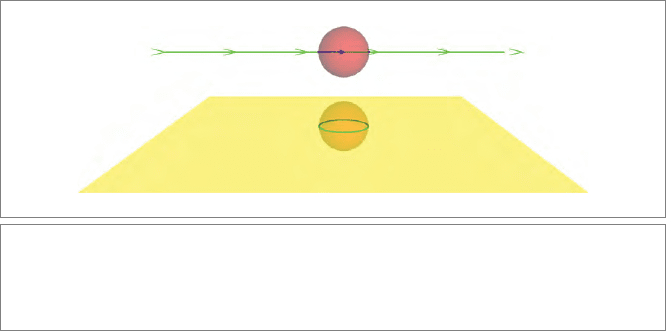
Figure 15.10(c) shows that when X is a line L and A is a sphere S,wegetagreatcircleon
the sphere, which is indeed a sensible interpretation of what it would be to project a line
on a sphere. Obviously, these examples generalize to the other elements we have treated.
You can even project a tangent vector onto a sphere (and the result is the point pair in
which the plunging circle containing the tangent vector meets the sphere).
In summary, the operation of projection generalizes from flats in a sensible, but somewhat
unusual manner, providing a fundamental operation that seems to be new to Euclidean
geometry. We have yet to discover applications in which it might be useful to encode these
constructions compactly.
(a) (b) (c)
(C
⎦ )/
(L
⎦ )/
(L
⎦ S)/S
C
C∧
∏
∗
L∧
∏
∗
L∧S
∗
L
∏
∏
L
S
∏ ∏
∏∏
Figure 15.10: Orthogonal projections in the conformal model of Euclidean geometry.
SECTION 15.4 APPLICATION: ALL KINDS OF VECTORS 451
15.4 APPLICATION: ALL KINDS OF VECTORS
In the classical way of computing with geometry, we have different needs for indicating
1-D directional aspects. They all use a vector u, but in different ways, which should trans-
form in different manners to be consistent with that usage.
We may just mean the direction u in general, which is a free vector that can occur at any
location. Or we may attach a vector to a point p to make a tangent vector p at the location
u (which feels more like two geometrical elements put together rather than as a unified
concept). In 3-D, a normal vector can be used to denote a plane; it can be placed anywhere
in that plane (this practice generalizes to hyperplanes in n-D). The direction vector of a
line gives it an affine length measure that can be used anywhere along it; such a vector
is free to slide along the line. Finally, a position vector is used to denote the location of a
point relative to another point (the origin). This is actually a tangent vector that is always
attached to the origin (though in coordinate-based approaches, the origin is often left
implicitly understood).
Each of these concepts can be defined as an element in the conformal model, and
this makes them have precisely the right transformation properties. Of course this is
true for higher-dimensional directional elements as well, and we have treated them
all above. But it pays to treat the vectors separately and explicitly. You know them
intimately, and may have come across problems in modeling and coding in which
the coordinate approach just was not specific enough to specify permitted transfor-
mations. The typical solution would be to define different data structures for each,
with their own methods [24, 13]. The conformal model offers an alternative: use pre-
cise algebraic elements that have the correct transformational properties, and then use
just general methods (versors) to transform them. Each object automatically trans-
forms correctly. Moreover, its clear algebraic relationship to the other computational
elements dispenses with the need for a profusion of new methods explicitly specifying
the various interactions. The algebraic data structures automatically perform compu-
tation and administration at the same time.
So, let us make these types of vectors; they are illustrated in Figure 15.11.
•
Free Vector u ∧∞. A 1-D direction without location is represented by the element
u ∧∞= u ∞. Its directional aspect is exhibited by applying a rotation rotor to it:
R[u ∧∞] = R[u] ∧ R[∞] = R[u] ∧∞,
which shows that u is the element denoting its direction. Applying a translation
rotor gives
T
p
[u ∧∞] = T
p
[u] ∧ T
p
[∞] =
u + (p · u) ∞
∧∞= u ∧∞,