Ещин Е.К. Моделирование систем управления электромеханическими объектами
Подождите немного. Документ загружается.

131
()
()
()
()
()
()
()
()
()
′′′′
∆
+
′′′
∆
+
′′
∆+
′
≈
′
′′′′
∆
+
′′′
∆
+
′′
∆+
′
≈
′
′′′′
∆
+
′′′
∆
+
′′
∆+
′
≈
′
.f
!
t
f
!
t
ftff
,f
!
t
f
!
t
ftff
,f
!
t
f
!
t
ftff
0
3
0
2
003
0
3
0
2
002
0
3
0
2
001
3
27
2
93
3
8
2
42
32
Представим последние выражения в виде системы относительно неизвестных
()
()
()
0
3
0
2
0
3
2
f
!
t
,f
!
t
,ft
′′′′
∆
′′′
∆
′′
∆
:
()
()
()
()
()
()
()
()
()
′
−
′
=
′′′′
∆
+
′′′
∆
+
′′
∆
′
−
′
=
′′′′
∆
+
′′′
∆
+
′′
∆
′
−
′
=
′′′′
∆
+
′′′
∆
+
′′
∆
.fff
!
t
f
!
t
ft
,fff
!
t
f
!
t
ft
,fff
!
t
f
!
t
ft
030
3
0
2
0
020
3
0
2
0
010
3
0
2
0
3
27
2
93
3
8
2
42
32
Эта система может быть приведена к виду
()
()
()
() ()
()
′
−
′
+
′
−
′
=
′′′′
∆
′
+
′
−
′
=
′′′′
∆
+
′′′
∆
′
−
′
=
′′′′
∆
+
′′′
∆
+
′′
∆
.fffff
!
t
,ffff
!
t
f
!
t
,fff
!
t
f
!
t
ft
01230
3
0120
3
0
2
010
3
0
2
0
33
3
6
2
3
6
2
2
32
откуда следует:
()
()
()
′
−
′
+
′
−
′
=
′′′′
∆
′
+
′
−
′
+
′
−
=
′′′
∆
′
−
′
+
′
−
′
=
′′
∆
.
ffff
f
!
t
,
ffff
f
!
t
,
ffff
ft
6
33
3
6
254
2
6
111892
0123
0
3
0123
0
2
0123
0
После дальнейших преобразований получим:
()
321001
519
24
ffff
t
ff
′
+
′
−
′
+
′
∆
+=
,
откуда определяются расчетные формулы для вычисления составляющих потокосцеплений ста-
тора в неподвижной системе координат:
132
() ( ) () () () ()
() ( )
() () () ()
,
dt
d
dt
d
dt
d
dt
dt
,
dt
d
dt
d
dt
d
dt
dt
ssssss
ssssss
Ψ+Ψ−Ψ+Ψ
∆
+Ψ=Ψ
Ψ+Ψ−Ψ+Ψ
∆
+Ψ=Ψ
ββββββ
αααααα
321001
321001
5199
24
5199
24
где производные от составляющих потокосцеплений определяются правыми частями уравнений
движения (измеренными значениями токов и напряжений статора).
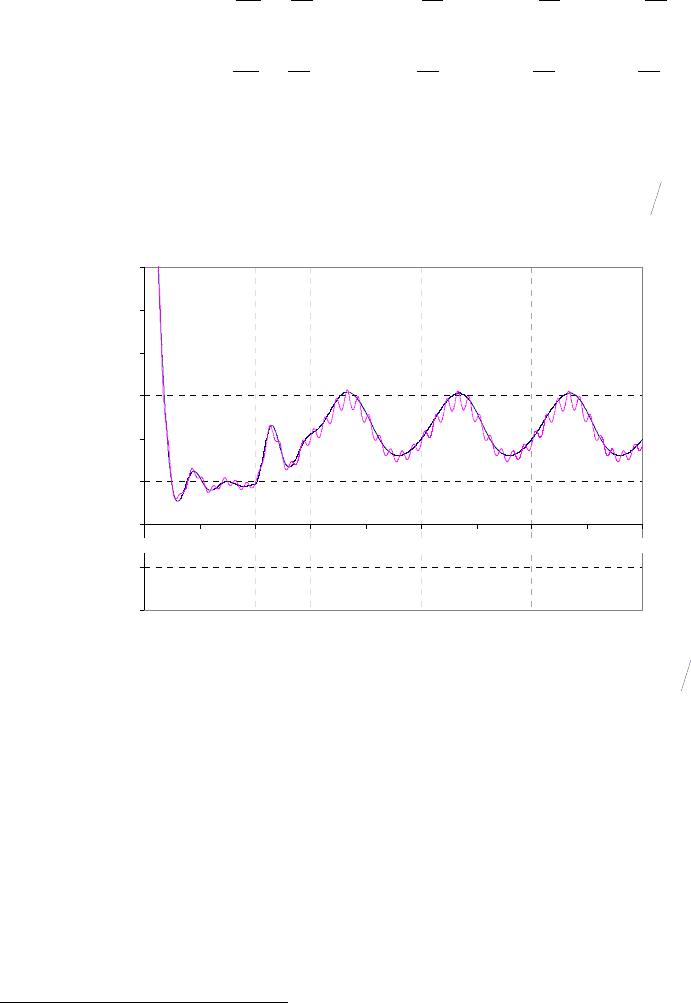
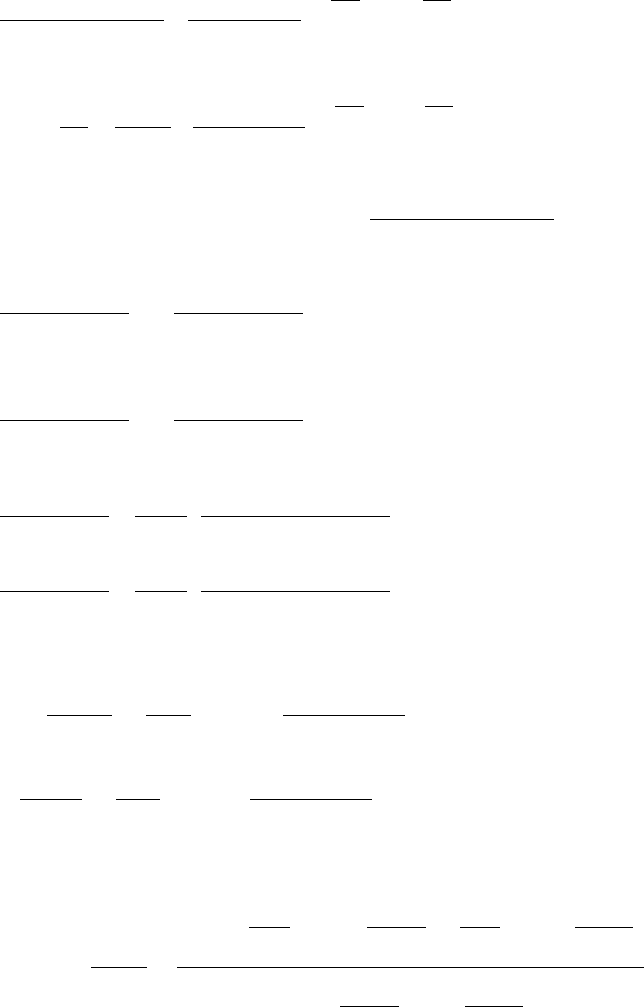
Ниже на рисунке приведены вычисленное при помощи косвенной оценки значений электромаг-
нитного момента и потокосцепления ротора отношение
(
)
2
r
n
MM Ψ+
(содержит гармоническую со-
ставляющую с частотой сети) и идеальное расчетное значение этого отношения.
-200
-100
0
100
200
300
400
500
600
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t,C
(Mn+M)/Pr2
Вычисленное при помощи наблюдателей и истинное значения
(
)
2
r
n
MM Ψ+
Определение значений активного сопротивления ротора и скорости вращения ротора возможно
на основе использования
64
.
Ниже приведены фрагменты исходных модулей для вычисления значений электромагнитных
моментов двигателя и значений потокосцеплений ротора.
Procedure Shet;
{
Решение системы ДУ с обеспечением точности
}
var i,l,j,k,Seat : integer;
delta,Del_I,
64
А.с.1468211 СССР, G 01 R 31/34. Устройство для определения параметров асинхронных электродви-
гателей /Е.К. Ещин, В.Л. Иванов, В.Г. Власов и др. (СССР). -N4184538; Заявлено 26.01.87; Опубл.
15.11.88.
А.с.1802347 СССР, G 01 R 31/34. Устройство для определения параметров асинхронного электродвига-
теля /Е.К. Ещин, Д.А. Алешин, В.Л. Иванов (СССР). -N4928795; Заявлено 18.04.91; Опубл. 15.03.93,
Бюл.N10.
Toshiyuki Kanmachi, Isao Takahashi. Sensor-Less Speed Control of an Induction Motor // IEEE Industry Appli-
cations Magazine. January/February, 1995. P.22-27
133
Usa1,Utra,Uka,Usb1,Utrb,Ukb,
Lr,Ls,Pra,Prb,Pid: extended{real};
N_str: string;
BEGIN ClrScr;
j:=1;
while x0<=xk do begin
Runge(x0);
for i:=1 to n do yz[i]:=y[i];
h:=h/2;
Runge(x0);
for i:=1 to n do y0[i]:=y[i]; x0:=x0+h;
Runge(x0);
l := 0;
for i:=1 to n do begin
if abs(yz[i]-y[i]) < eps*abs(y[i]) then l:=l + 1;
end;
if L = n then { Точность достигнута }
if abs(x0+h-Xp) < abs(Xp)*0.0000001 then begin
xx0 := x0 + h;
gotoXY(1,1);
Writeln('t=',xx0:8:5,' W1=',y[5]:7:2,' 1/с');
writeln('M=',M:12:2,' Lk=',Lkab:5:2);
{ Формирование очередных значений производных потокосцеплений }
DFsa[3]:=F[1]; DFsb[3]:=F[2];
{ Формирование начальных значений производных потокосцеплений }
if j<=3 then begin
DFsa[j]:=F[1];
DFsb[j]:=F[2];
j:=j+1;
end
else begin
{ Вычисление значений потокосцеплений статора }
Fsa[1]:=Fsa[0]+DLXp*(9*DFsa[0]+19*DFsa[1]-5*DFsa[2]+DFsa[3])/24;
Fsb[1]:=Fsb[0]+DLXp*(9*DFsb[0]+19*DFsb[1]-5*DFsb[2]+DFsb[3])/24;
{ Переопределение начальных значений потокосцеплений и их производных }
Fsa[0]:=Fsa[1]; Fsb[0]:=Fsb[1];
DFsa[0]:=DFsa[1]; DFsa[1]:=DFsa[2]; DFsa[2]:=DFsa[3];
DFsb[0]:=DFsb[1]; DFsb[1]:=DFsb[2]; DFsb[2]:=DFsb[3];
end;
{ Электромагнитный момент как функция потокосцепления и тока статора }
Mp:=3*p*(Fsa[1]*Isb-Fsb[1]*Isa)/2;
Lr:=L1+Lm; Ls:=L2+Lm;
{
Вычисление потокосцепления ротора.
Здесь есть маленькая неточность. Определите какая?
}
Pra:=Lm*Isa+Lr/Lm*(Fsa[1]-Ls*Isa);
Prb:=Lm*Isb+Lr/Lm*(Fsb[1]-Ls*Isb);
Pr2:=sqr(Pra)+sqr(Prb);
134
readln(Old_Mt,Old_str);
str(M:10:5,N_Str);
New_Str:=Concat(Old_Str,' ',N_Str);
writeln(New_Mt,New_Str);
readln(Old_wt,Old_str);
str(y[5]:10:5,N_Str);
New_Str:=Concat(Old_Str,' ',N_Str);
writeln(New_wt,New_Str);
h := hz;
x0 := Xp; x0z := x0;
Xp := Xp + DLXp;
for i := 1 to n do begin
y0[i] := y[i];
y0z[i] := y[i];
end;
end
else begin
x0:=x0+h; h:= Xp-x0; x0z := x0;
for i:=1 to n do begin
y0[i]:=y[i];
y0z[i]:=y[i];
end;
end { for x0+h = Xp..........}
else begin
x0:=x0z;
for i:=1 to n do y0[i]:=y0z[i];
end; { for if L = n ..........}
end; { for while .....}
END;
{================================================================}
procedure uravnen(x:real);
var Mc:real;
begin
{
Определение коэффициентов уравнений АД
}
{----- АИМ160М4 --------------------------------------------}
Rs:=0.516; Rr:=0.406;
xs:=1.419; Xr:=1.1;
Lm:=35/314;
p :=2.0;
GD2:=0.7;
l1:=xs/314;
L2:=Xr/314;
{ Коэффициенты уравнений }
Lps:=l1+l2*lm/(l2+lm);
Lpr:=l2+l1*lm/(l1+lm);
135
Ks :=lm/(lm+l1);
Kr :=lm/(lm+l2);
c :=3*p*ks/(2*lpr);
{ Составляющие токов статора и ротора }
Isa:=(y[1]-Kr*y[3])/Lps;
Isb:=(y[2]-Kr*y[4])/Lps;
Ira:=(y[3]-Ks*y[1])/Lpr;
Irb:=(y[4]-Ks*y[2])/Lpr;
{ Электромагнитный момент АД }
M :=c*(y[3]*y[2]-y[1]*y[4]);
{ Формирование момента сопротивления на валу АД }
if x<=0.3 then Mc:=0
else Mc:=250+100*sin(6.28*5*x);
{ Составляющие напряжения питания }
Ua:=380.0*sqrt(2.0)*sin(314.0*x);
Ub:=380.0*sqrt(2.0)*sin(314.0*x-1.57);
{ Уравнения движения АД в неподвижной системе координат }
f[1] :=Ua-Rs*Isa;
f[2] :=Ub-Rs*Isb;
f[3] :=-Rr*ira-p*y[5]*y[4];
f[4] :=-Rr*irb+p*y[5]*y[3];
f[5] :=4*(M-Mc)/GD2;
end;
{=============================================================}
15.2.ДОСТАТОЧНЫЕ УСЛОВИЯ АБСОЛЮТНОГО МИНИМУМА В.Ф.КРОТОВА
Решение задачи оптимального управления состоянием асинхронного электродвигателя можно
получить на основе достаточных условий абсолютного минимума согласно
65
. При этом требуется обра-
зование вспомогательной функции:
()
()
()
()
,
t
U
,,,
f
p
k
L
R
L
R
p
k
L
R
L
R
k
L
R
L
R
U
k
L
R
L
R
U
t,
U
,,,R
s
rs
ru
n
sv
s
r
r
rv
r
r
rv
rvnsu
s
r
r
ru
r
r
ru
sunrv
r
s
s
sv
s
s
sv
sv
svnru
r
s
s
su
s
s
su
su
s
rs
''
''
''
''
∂
∂ϕ
α
ωαω
∂
∂ϕ
ωαω
∂
∂ϕ
αω
∂
∂ϕ
αω
∂
∂ϕ
α
+
ΨΨ
−
−
Ψ
−−
Ψ
+
Ψ
−
Ψ
+
+
Ψ
−+
Ψ
+
Ψ
−
Ψ
+
+
Ψ
−
Ψ
+
Ψ
−
Ψ
+
+
Ψ
+
Ψ
+
Ψ
−
Ψ
=
=
ΨΨ
0
65
Кротов В.Ф., Гурман В.И. Методы и задачи оптимального управления. -М.: Наука,1973. -446 c.
Кротов В.Ф., Букреев В.З., Гурман В.И. Новые методы вариационного исчисления в динамике полета. -
М.: Машиностроение,1969. -288 c.
136
где
()
ΨΨ
=
r
s
,,t
ϕ
ϕ
- некоторая произвольная функция фазовых координат и времени.
Для задач с подвижной границей, к которым относится и рассматриваемая нами задача, условие
абсолютного экстремума записывается в виде
()
(
)
,
U
,,,Rsup
s
rs
A
U
s
,
0≡
ΨΨ
∈∀
α
α
где А - область допустимых значений управлений α,U
s
.
Поскольку задача оптимального управления считается математически решенной до конца, если
управление оказывается найденным в функции параметров состояния объекта (в нашем случае АД), по-
требуем от ϕ независимости от времени, т.е. положим, что
∂ϕ
∂
t
=
0.
Кроме того, необходимыми условиями максимума функции
(
)
t,
U
,,,R
s
r
s
α
ΨΨ
будут являться
требования:
()()
()()
()()
()
0
00
00
00
=
Ψ
ΨΨ
=
Ψ
ΨΨ
=
Ψ
ΨΨ
=
Ψ
ΨΨ
=
ΨΨ
=
ΨΨ
=
ΨΨ
.
t,
U
,,,R
,
t,
U
,,,R
,
t,
U
,,,R
,
t,
U
,,,R
,
t,
U
,,,R
,
U
t,
U
,,,R
,
U
t,
U
,,,R
rv
s
rs
ru
s
rs
sv
s
rs
su
s
rs
s
rs
su
s
rs
sv
s
rs
∂
α∂
∂
α∂
∂
α∂
∂
α∂
∂α
α∂
∂
α
∂
∂
α
∂
Из первых двух соотношений следует
() ()
0 0 ,
,
,
,
s
v
sr
s
u
sr
=
Ψ
ΨΨ
=
Ψ
ΨΨ
∂
∂ϕ
∂
∂ϕ
что ведет к конкретизации выражения для R
()
()
()
()
.
U
,,,
f
p
k
L
R
L
R
p
k
L
R
L
R
U
,,,R
s
r
s
ru
n
sv
s
r
r
rv
r
r
rv
rvnsu
s
r
r
ru
r
r
ru
s
rs
''
''
α
ωαω
∂
∂ϕ
ωαω
∂
∂ϕ
α
ΨΨ
−
−
Ψ
−−
Ψ
+
Ψ
−
Ψ
+
+
Ψ
−+
Ψ
+
Ψ
−
Ψ
=
ΨΨ
0
Необходимые условия максимума также обеспечивают
()
()
()
()
,
U
,,,
f
p
k
L
R
L
R
k
L
R
p
k
L
R
L
R
U
,,,R
s
u
s
rs
run
sv
s
r
r
rv
r
r
survru
s
r
r
rv
n
su
s
r
r
ru
r
r
surusu
s
rr
''
'
''
Ψ
ΨΨ
−
−
Ψ
−−
−
Ψ
+
Ψ
−
ΨΨ
+
Ψ
+
+
Ψ
−+
+
Ψ
+
Ψ
−
ΨΨ
=
Ψ
ΨΨ
∂
α∂
ωαω
∂∂
ϕ
∂
∂
∂ϕ
ωαω
∂∂
ϕ
∂
∂
α∂
0
2
2
137
()
()
()
()
.
U
,,,
f
p
k
L
R
L
R
k
L
R
p
k
L
R
L
R
U
,,,R
s
v
s
rs
ru
n
sv
s
r
r
rv
r
r
svrvrv
s
r
r
rv
n
su
s
r
r
ru
r
r
svrusv
s
rr
''
'
''
Ψ
ΨΨ
−
−
Ψ
−−
−
Ψ
+
Ψ
−
ΨΨ
+
Ψ
+
+
Ψ
−+
+
Ψ
+
Ψ
−
ΨΨ
=
Ψ
ΨΨ
∂
α∂
ωαω
∂∂
ϕ
∂
∂
∂ϕ
ωαω
∂∂
ϕ
∂
∂
α∂
0
2
2
Справедливы следующие выражения:
() ()
() ()
.
,
,
,
,
,
,
,
sv
r
v
rs
sv
ru
rs
surv
rs
suru
rs
00
00
22
22
=
ΨΨ
ΨΨ
=
ΨΨ
ΨΨ
=
ΨΨ
ΨΨ
=
ΨΨ
ΨΨ
∂∂
ϕ
∂
∂∂
ϕ
∂
∂∂
ϕ
∂
∂∂
ϕ
∂
Учитывая их, получаем:
()
()
()
()
.
U
,,,
f
k
R
L
,
,
U
,,,
f
k
R
L
,
sv
s
rs
s
r
r
r
v
rs
su
s
rs
s
r
r
ru
rs
'
'
Ψ
ΨΨ
⋅=
Ψ
ΨΨ
Ψ
ΨΨ
⋅=
Ψ
ΨΨ
∂
α∂
∂
∂ϕ
∂
α∂
∂
∂ϕ
0
0
Далее будем иметь соотношение:
()
()
,
f
L
k
R
p
k
f
L
k
R
p
k
f
ru
r
s
r
n
sv
s
rv
sv
rv
r
s
r
n
su
s
ru
su
'
'
0
0
0
0
=−
Ψ
−
+
Ψ
+
Ψ
−
Ψ
+
+
Ψ
−
+
Ψ
+
Ψ
−
Ψ
ωαω
∂
∂
ωαω
∂
∂
разрешая которое относительно α, запишем требуемый конечный результат, определяющий связь
частоты тока статора, параметров двигателя и цели управления
.
ff
f
k
f
k
f
k
L
R
sv
ru
su
rv
sv
sv
s
rv
su
su
s
ru
s
r
’
r
p
'
Ψ
Ψ
−
Ψ
Ψ
Ψ
Ψ
−
Ψ
+
Ψ
Ψ
−
Ψ
+
+=
∂
∂
∂
∂
∂
∂
∂
∂
ω
α
α
00
00
0
Если цель управления записать в виде
()
()
∫
−=
∈∀
t
U,
t
M
n
dtMinfJ
0
2
γα
,
где M
n
, M - необходимое и текущее значения электромагнитного момента АД и M
n
- или константа, или
медленно изменяющаяся по технологическим условиям функция, то получим аналитическую конструк-
цию регулятора в виде
138
()
Ψ
+
+=
2
r
n
s
r
n
r
p
MM
k
L
R
'
ω
α
α
,
где
Ψ
+
Ψ
=
Ψ
222
r
v
ru
r
.
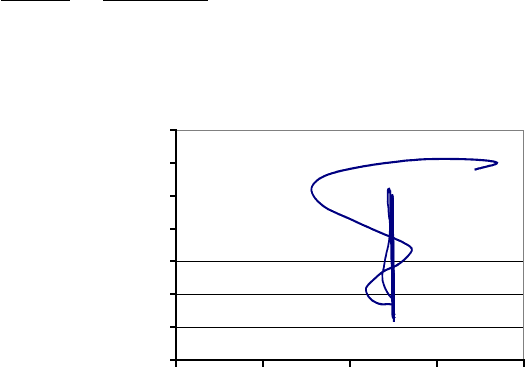
Результаты математической реализации применительно к АД ВРП160М4 приведены на рисунке.
150
151
152
153
154
155
156
157
0 20406080
М.Нм
W,1/C
Стабилизация электромагнитного момента АД в идеальном варианте управления (динамическая меха-
ническая характеристика)
Видно, что по истечении определенного времени (≈0.07с) устанавливается идеальное качество
управления (стабилизация электромагнитного момента, тока статора).
Таким образом, использование алгоритмов оптимизации на основе достаточных условий абсо-
лютного минимума В.Ф.Кротова дает возможность получить общее решение для построения аналитиче-
ской конструкции регулятора при решении проблемы управления состоянием асинхронных электродви-
гателей.
16.МАТЕМАТИЧЕСКИЕ ОСНОВЫ КОНСТРУИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ
16.1.УПРАВЛЕНИЕ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ ГОРНЫХ МАШИН
Как уже упоминалось, современные системы электроснабжения добычных участков угольных
шахт обычно в качестве основных элементов включают в себя силовой питающий трансформатор, про-
тяженную кабельную сеть и различное количество асинхронных электродвигателей (АД), которые ис-
пользуются в приводах горных машин.
Обычно в приводах основных горных машин (выемочные комбайны, скребковые конвейеры и
пр.) используется несколько асинхронных электродвигателей с короткозамкнутым ротором.
Условия и режимы работы этих электродвигателей считаются неблагоприятными. Моменты со-
противления на их валах могут отличаться как по амплитудам периодических составляющих нагрузки,
так и по углам фазового сдвига.
Поэтому естественна постановка задачи управления состоянием такого класса электроприводов с
целью обеспечения экстремума некоторого функционала, записываемого обычно в интегральной форме
и количественно оценивающего упомянутое состояние.
Рассмотрим вариант частотного управления электроприводом как один из наиболее эффективных
с точки зрения возможности формирования необходимых динамических характеристик электродвигате-
лей.
139
16.2.МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ.
С точки зрения моделирования система электроснабжения и электроприводов горных машин, на-
чиная от силового трансформатора, представляет собой совокупность связанных типовых электромеха-
нических модулей (ТЭМ).
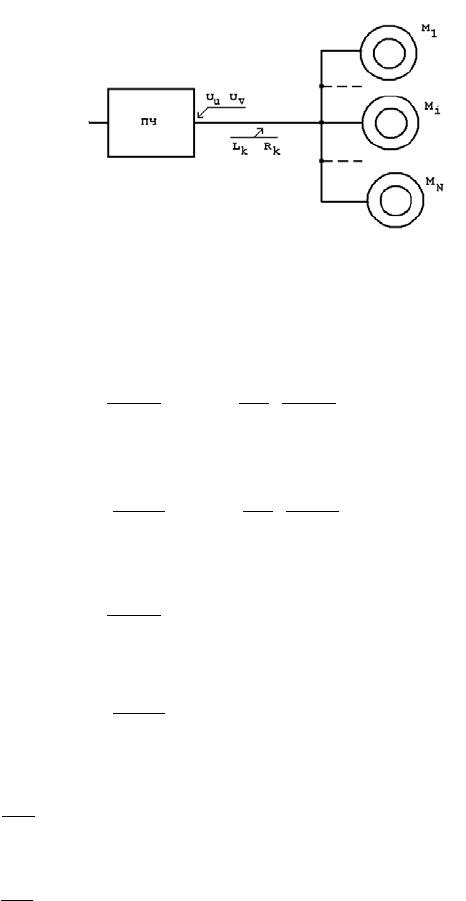
Ранее было показано, что для подобной схемы соединения (см.рисунок)
Расчетная схема типового электромеханического модуля при работе от преобразователя частоты
(ПЧ).
электрических машин применимо следующее описание в системе синхронных вращающихся координат
U,V:
()
()
=Ψ−−=
=
Ψ
=Ψ−+−=
=
Ψ
+=
=
Ψ
⋅
∑
+
Ψ
+=
=
Ψ
⋅
∑
+
Ψ
=
=
,-
1
1
4
3
1
1
iruiiinrviri
rvi
irviiinruiri
rui
v
svj
N
j
'
sj
k
svi
u
suj
N
j
'
sj
k
sui
fpiR
dt
d
,fpiR
dt
d
,iNv_itemU
dt
d
L
L
dt
d
,iNu_itemU
dt
d
L
L
dt
d
ωαω
ωαω
где:
Ψ−−
∑
−
∑
=
Ψ+−
∑
−
∑
=
==
==
.iRiRf
L
k
LiNv_item
,iRiRf
L
k
LiNu_item
suinsvisi
N
j
svjkj
N
j
'
sj
rj
k
svinsuisi
N
j
sujkj
N
j
'
sj
rj
k
αω
αω
1
4
1
1
3
1
;
rvrusvsu
,,, ΨΨΨΨ
имеющие индексы i или j, составляющие потокосцеплений статоров и роторов АД
по осям синхронной системы координат u,v (фазовые координаты);
kk
LR ,
- активное сопротивление и
индуктивность общего участка кабельной сети;
ri
s
i
RR ,
-активные сопротивления статоров и роторов
АД;
n
ω
-синхронная угловая частота вращения поля статора АД;
i
ω
-геометрические частоты вращения
роторов АД; p
i
- числа пар полюсов; k
rj
-коэффициенты электромагнитной связи роторов;
'
sj
L
- переход-
140
ные индуктивности статоров;
rviruisvisui
i,i,i,i
- составляющие токов статоров и роторов АД по осям
синхронной системы координат u,v; U
u
, U
v
-составляющие напряжения питания по осям u,v (управляю-
щие воздействия) на выходе преобразователя частоты; α -относительная частота тока статоров АД
(
n
ff=
α
- управляющее воздействие);
,
L
k
L
i,
L
k
L
i
rvj
'
sj
rj
'
sj
svj
svjruj
'
sj
rj
'
sj
suj
suj
Ψ−
Ψ
=Ψ−
Ψ
=
.
L
k
L
i,
L
k
L
i
svi
'
ri
si
'
ri
rvi
rvisui
'
ri
si
'
ri
rui
rui
Ψ−
Ψ
=Ψ−
Ψ
=
Приведение к канонической форме записи этой системы обыкновенных дифференциальных
уравнений относительно производных по времени от составляющих потокосцеплений статора и ротора
по осям u, v базируется на решении этой системы как линейной алгебраической относительно упомяну-
тых производных.
16.3.ОСОБЕННОСТИ СИНТЕЗА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ
ГОРНЫХ МАШИН
Современные электроприводы горных машин конструируются модульно, причем обычно модуль
содержит два асинхронных электродвигателя с короткозамкнутым ротором.
В общем виде модули могут содержать более двух двигателей и объединяться в уже рассмотрен-
ную ранее структуру. Эта структура может быть при конкретизации ее применима для описания состоя-
ния, например, системы, состоящей из электроприводов забойного конвейера (с головным и хвостовым
приводом) и добычного комбайна.
При этом модель электромеханического преобразования энергии такой совокупностью связанных
электромеханических преобразователей (асинхронных электродвигателей с короткозамкнутым ротором)
в общей для них системе электроснабжения в неподвижной системе координат будет выглядеть с выде-
лением производных от потокосцеплений:
[]
[]
[]
[]
[]
[]
,iRiR
f
L
k
LiRf
L
k
LU
dt
d
L
L
dt
d
L
L
dt
d
issi
NmNu
NmNmNuj
jskNu
j
NmNu
NmNmNuj
'
sj
rj
kNu
N
j
jskoj
N
j
'
sj
rj
ko
js
NuNm
NmNuNmj
'
sj
kNu
js
N
j
'
sj
ko
is
αα
αα
αα
α
−−
−+−+=
=
Ψ
⋅+
Ψ
⋅+
Ψ
∑
∑∑∑
∑∑
⋅
+−⋅=
⋅
+−⋅===
⋅
+−⋅==
1
3
11
3
1
11
11
[]
[]
[]
[]
[]
[]
,
11
1
4
1
'
1
4
1
'
1
'
1
'
issi
NmNu
NmNmNuj
jskNu
j
NmNu
NmNmNuj
sj
rj
kNu
N
j
jskoj
N
j
sj
rj
ko
js
NmNu
NmNmNuj
sj
kNu
js
N
j
sj
ko
is
iRiR
f
L
k
LiRf
L
k
LU
dt
d
L
L
dt
d
L
L
dt
d
ββ
ββ
βββ
−−
−+−+=
=
Ψ
⋅+
Ψ
⋅+
Ψ
∑
∑∑∑
∑∑
⋅
+−⋅=
⋅
+−⋅===
⋅
+−⋅==