Ещин Е.К. Моделирование систем управления электромеханическими объектами
Подождите немного. Документ загружается.

141
.+
,
4
3
iiriiirri
ir
iiriiirri
ir
fpiR
dt
d
fpiR
dt
d
=Ψ−=
Ψ
=Ψ−−=
Ψ
αβ
β
βα
α
ω
ω
В рассматриваемой задаче целевой функционал можно записать в виде
{}()
0
0
,dt,,,finfJ
t
risi
A,
=
∫
∈∀
α
α
UΨΨ
U
где: i=1,...,N; N - количество электродвигателей в приводе;
ri
s
i
,ΨΨ
- векторы потокосцеплений стато-
ров и роторов АД; α- относительная частота тока статоров;
U – вектор выходного напряжения преобра-
зователя частоты с составляющими U
u
,U
v
(рис.4); А – допустимая область изменения α, U.
Если цель управления, как и ранее, будет связана исключительно с формированием состояния
только
двигателей, то возмущающими воздействиями в системе можно считать угловые частоты враще-
ния роторов АД. Это допустимо. Приведенный выше рисунок соответствует варианту, когда осуществ-
ляется управление, например, приводом комбайна или конвейера. При этом преобразователь частоты
располагается на значительном удалении от самих электродвигателей.
Управляющими воздействиями при частотном способе управления состоянием электроприводов
принимаем относительную частоту тока α и напряжения U
u
, U
v
на выходе преобразователя частоты ПЧ.
Управляющие воздействия будут общими для всех электродвигателей. В этих условиях следует говорить
о компромиссном управлении.
При решении задачи управления рабочую математическую модель удобнее записать в системе
синхронных вращающихся координат u,v в виде:
()
()
=Ψ−−=
Ψ
=Ψ−+−=
Ψ
+=
Ψ
⋅
∑
+
Ψ
+=
Ψ
⋅
∑
+
Ψ
=
=
,-
1
1
4
3
1
1
iruiiinrviri
rvi
i
rviiinruiri
rui
v
svj
N
j
'
sj
k
svi
u
suj
N
j
'
sj
k
sui
fpiR
dt
d
,fpiR
dt
d
,iNv_itemU
dt
d
L
L
dt
d
,iNu_itemU
dt
d
L
L
dt
d
ωαω
ωαω
где:
Ψ−−−=
Ψ+−−=
∑∑
∑∑
==
==
.iRiRf
L
k
LiNv_item
,iRiRf
L
k
LiNu_item
suinsvisi
N
j
svjkj
N
j
'
sj
rj
k
svinsuisi
N
j
sujkj
N
j
'
sj
rj
k
αω
αω
1
4
1
1
3
1
;
В ряде работ по оптимальному управлению непрерывными системами
66
определены мощные ал-
горитмы построения аналитических конструкций оптимальных регуляторов для систем, поведение кото-
66
Кротов В.Ф., Букреев В.З., Гурман В.И. Новые методы вариационного исчисления в динамике полета. -
М.: Машиностроение, 1969. -288 с.
142
рых описывается совокупностями обыкновенных дифференциальных уравнений и уравнениями в част-
ных производных. При этом запись уравнений движения систем осуществляется в канонической форме,
т.е. в виде дифференциальных связей, разрешенных относительно первых производных от фазовых ко-
ординат по времени. Правые части этих связей – алгебраические выражения. Как было показано, эти ме-
тоды дают приемлемые решения в вариантах управления однодвигательными приводами.
В рассматриваемом нами варианте задачи управления многодвигательным электроприводом воз-
можности записи модели в каноническом виде крайне ограничены и могут практически существовать
только для одно или двух двигательного вариантов приводов. Это означает, что использование упомяну-
тых методов осложняется.
Вместе с тем, в теории классического вариационного исчисления
67
определены алгоритмы поиска
условий экстремальности функционалов рассматриваемого нами вида при формулировке задачи на ус-
ловный экстремум с подвижными границами.
Поэтому рассмотрим задачу об обеспечении минимума упомянутого функционала при наличии
дифференциальных связей, описывающих состояние АД
()
()
=Ψ−++
Ψ
=−−
Ψ
⋅
∑
+
Ψ
=Ψ−−+
Ψ
=−−
Ψ
⋅
∑
+
Ψ
=
=
0
0
1
0
0
1
1
1
.piR
dt
d
,iNv_itemU
dt
d
L
L
dt
d
,piR
dt
d
,iNu_itemU
dt
d
L
L
dt
d
ruiiinrviri
rvi
v
svj
N
j
'
sj
k
svi
rviiinruiri
rui
u
suj
N
j
'
sj
k
sui
ωαω
ωαω
Формулируя задачу как классическую на условный экстремум с подвижными концами, образуем
вспомогательную функцию
+
Ψ+++−−
Ψ
⋅+
Ψ
+
+
Ψ−++−−
Ψ
⋅+
Ψ
+
+=
∑∑∑∑
∑∑∑∑
====
====
N
i
suinsvisi
N
j
svjkj
N
j
'
sj
rj
kv
svj
N
j
'
sj
k
svi
i
N
i
svinsuisi
N
j
sujkj
N
j
'
sj
rj
ku
suj
N
j
'
sj
k
sui
i
iRiRf
L
k
LU
dt
d
L
L
dt
d
iRiRf
L
k
LU
dt
d
L
L
dt
d
fH
11
4
11
2
11
3
11
1
0
1
1
αωλ
αωλ
()
()
,p
L
k
R
dt
d
p
L
k
R
dt
d
N
i
ruiiin
'
ri
svisirvi
ri
rvi
i
N
i
rviiin
'
ri
suisirui
ri
rui
i
0
1
4
1
3
=
Ψ−+
Ψ−Ψ
+
Ψ
+
+
Ψ−−
Ψ−Ψ
+
Ψ
+
∑
∑
=
=
ωαωλ
ωαωλ
где:
λ
ji
(t) - множители Лагранжа; j =1,2,3,4 и далее систему уравнений Эйлера
Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая теория оптималь-
ных процессов .-4-е изд. -М.: Наука,1983. -392 c.
Крутько П.Д. Обратные задачи динамики управляемых систем. -М.: Наука,1987. -304 c.
Кунцевич В.М., Лычак М.М. Синтез систем автоматического управления с помощью функций Ляпунова.
-М.: Наука,1977. -400 c.
67
Эльсгольц Л.Э. Дифференциальные уравнения и вариационное исчисление. -М.: Наука,1969. -424 c.
143
,
H
dt
dH
,
H
dt
dH
,
U
H
dt
d
U
H
,
U
H
dt
d
U
H
'
svi
svi
'
sui
sui
'
v
v
'
u
u
tt
tt
0 0
0 0
=
Ψ∂
∂
−
Ψ∂
∂
=
Ψ∂
∂
−
Ψ∂
∂
=
∂
∂
−
∂
∂
=
∂
∂
−
∂
∂
где
.
dt
d
,
dt
d
svi
'
svi
sui
'
sui
tt
Ψ
=Ψ
Ψ
=Ψ
Можно показать, что из первых двух условий следует:
λ
1i
(t)=0,
λ
2i
(t)=0. Учитывая это, из третьего
и четвертого получаем:
.
f
Rk
L
,
f
Rk
L
s
viri
s
i
'
ri
i
s
uiri
s
i
'
ri
i
Ψ∂
∂
=
Ψ∂
∂
=
0
4
0
3
λλ
Используя найденные выражения для множителей Лагранжа во вспомогательной функции H и
учитывая, что в условиях экстремума H
≡
0, пишем последовательно
()
()
.p
L
k
R
dt
d
f
Rk
L
p
L
k
R
dt
d
f
Rk
L
fH
N
i
ruiiin
'
ri
svisirvi
ri
rvi
svirisi
'
ri
N
i
rviiin
'
ri
suisirui
ri
rui
suirisi
'
ri
0
1
0
1
0
0
=
Ψ−+
Ψ−Ψ
+
Ψ
Ψ∂
∂
+
+
Ψ−−
Ψ−Ψ
+
Ψ
Ψ∂
∂
+=
∑
∑
=
=
ωαω
ωαω
.
f
Rk
L
p
f
Rk
L
L
k
R
dt
d
f
Rk
L
f
Rk
L
p
f
Rk
L
L
k
R
dt
d
f
Rk
L
f
N
i
svirisi
'
ri
ruiii
N
i
svirisi
'
ri
ruin
N
i
'
ri
svisirvi
ri
rvi
svirisi
'
ri
N
i
suirisi
'
ri
rviii
N
i
suirisi
'
ri
rvin
N
i
'
ri
suisirui
ri
rui
suirisi
'
ri
0
1
0
1
0
1
0
1
0
1
0
1
0
0
=
Ψ∂
∂
Ψ−
+
Ψ∂
∂
Ψ+
Ψ−Ψ
+
Ψ
Ψ∂
∂
+
+
Ψ∂
∂
Ψ+
+
Ψ∂
∂
Ψ−
Ψ−Ψ
+
Ψ
Ψ∂
∂
+
∑
∑∑
∑
∑∑
=
==
=
==
ω
αω
ω
αω
Разрешая последнее выражение относительно управляющего воздействия α, получим результат – синте-
зирующую функцию
(
)
iri
s
i
,,,f
ωαα
ΨΨ
0
=
,
ff
Rk
L
p
L
k
R
dt
d
f
p
L
k
R
dt
d
f
Rk
L
f
N
i
svi
rui
sui
rvi
risi
'
ri
n
N
i
ruiii
'
ri
svisirvi
ri
rvi
svi
rviii
'
ri
suisirui
ri
rui
sui
risi
'
ri
∑
∑
=
=
Ψ∂
∂
Ψ−
Ψ∂
∂
Ψ
Ψ−
Ψ−Ψ
+
Ψ
Ψ∂
∂
+
+
Ψ+
Ψ−Ψ
+
Ψ
Ψ∂
∂
+
=
1
00
1
0
0
0
ω
ω
ω
α
которая характерна присутствием дополнительных операндов в виде производных от составляющих по-
токосцеплений роторов электродвигателей по времени. После дополнительных преобразований синтези-
рующую функцию можно представить в виде

144
.
ff
Rk
L
f
N
i svi
rui
sui
rvi
risi
'
ri
n
∑
Ψ∂
∂
Ψ−
Ψ∂
∂
Ψ
+=
=1
00
0
ω
αα
Заметим, что в правой и левой части последнего выражения присутствуют переменные с именем
α. Вместе с тем производить упрощение этого выражения, избавляясь формально от этих переменных
нельзя, поскольку они несут различную смысловую нагрузку. В левой части α определяет необходимое
значение частоты тока статоров АД, в правой части – текущее значение этой частоты, которое обозначим
через
α
t
. С учетом сказанного синтезирующая функция перепишется в виде
∑
=
Ψ∂
∂
Ψ−
Ψ∂
∂
Ψ
+=
N
i
svi
rui
sui
rvi
risi
'
ri
n
t
ff
Rk
L
f
1
00
0
ω
αα
и определит процедуру нахождения управляющего воздействия.
Обратим внимание на отсутствие в правой части функции информации о скоростях вращения ро-
торов АД. Это существенно, поскольку при практической реализации синтезирующей функции отпадает
необходимость в использовании датчиков скорости. (Известно, что системы управления электроприво-
дами без использования датчиков скорости используются, например, в системах векторного управле-
ния
68
). Заметим также, что построение синтезирующей функции требует знания параметров магнитной
цепи электродвигателя (значений индуктивностей цепи намагничивания и рассеяния статорной обмот-
ки), а также параметров роторной цепи – активного и реактивного сопротивлений. Вопросам определе-
ния этих параметров в настоящее время уделяется большое внимание, например
69
.
В качестве примера рассмотрим вариант управления, когда целью является стабилизация элек-
тромагнитных моментов АД, входящих в типовой электромеханический модуль. Такая задача может
возникнуть, например, при управлении состоянием двух двигательного электропривода добычного ком-
байна, когда двигатели имеют различный характер формирования момента сопротивления на валах.
Цель управления при этом можно конкретизировать через запись интегранта целевого функцио-
нала в виде
()
∑
=
−=
N
j
jnjj
MMf
1
2
0
λ
, где:
λ
j
– весовые коэффициенты, определяющие “важность” ми-
нимизации колебаний электромагнитного момента j-го электродвигателя, M
j
– текущее значение элек-
68
Kanmachi T., Takahashi I. Sensor-less speed control of induction motor. IEEE Industry Applications Maga-
zine. January/Februery 1995. P.22-27.
69
Ещин Е.К., Иванов В.Л., Алешин Д.А. Автоматизация экспресс-испытаний асинхронных электродви-
гателей // Электротехника. -1995. -№5. С.59-61.
Finch J.W., Atkinson D.J. and Acarnley P.P.. Full-order estimator for induction motor states and parameters
(p.169) IEE Proceedings - Electric Power Applications. May 1998, Vol. 145, Issue 3.
Wade S., Dunnigan M.W. and Williams B.W. Improving the accuracy of the rotor resistance estimate for vector-
controlled induction machines (p.285) IEE Proceedings - Electric Power Applications. September 1997, Vol.
144, Issue 5.
Atkinson D. J., Finch J. W. and Acarnley P. P. Estimation of rotor resistance in induction motors (p.87) IEE
Proceedings - Electric Power Applications January 1996, Vol. 143, Issue 1.
Donescu V., Charette A.,,Yao Z. Rajagopalan V. A new automated method for estimation of induction motor pa-
rameters. Electrical and Computer Ingineering, 1998. IEEE Canadien Conference. Volume 1, Pages:381-384.
Tungpimolrut, K.; Fang-Zheng Peng; Fukao, T.
A direct measuring method of machine parameters for vector - con-
trolled induction motor drives
.. Industrial Electronics, Control, and Instrumentation, 1993. Proceedings of the IE-
CON '93., International Conference, Page(s): 997 -1002 vol.2.
145
тромагнитного момента j-го электродвигателя -
()
rvjsujsvjruj
'
rj
sj
jj
L
k
pM ΨΨ−ΨΨ=
2
3
, M
nj
-необходимое
значение электромагнитного момента. С учетом этого пишем далее выражение для нахождения относи-
тельных значений частот токов статоров электродвигателей
()
()
,
R
MMp
MM
N
j
rj
rj
jnjjjn
N
j
jnjj
t
∑
∑
=
=
Ψ
−
−
+=
1
2
1
2
3
λω
λ
αα
где
.
rvjrujrj
222
Ψ+Ψ=Ψ
Ясно, что при переменной нагрузке на валах АД выражение (M
nj
-M
j
), присутствующее и в числи-
теле и в знаменателе будет представлять собой знакопеременную функцию. Это означает возможность
появления высокой вычислительной погрешности при определении необходимого значения частоты тока
статора α при значениях (M
nj
-M
j
) близких к нулевым и ведения соответствующих корректив в управле-
ние.
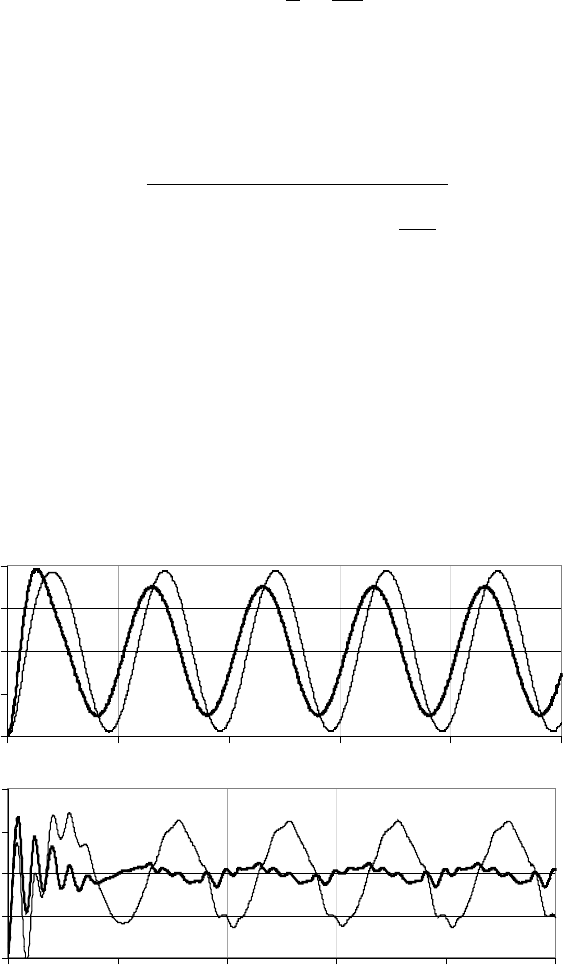
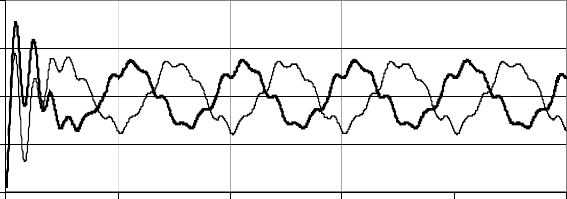
Пример реализации управления приведен на следующем рисунке, где представлены результаты
введения управления двух двигательным приводом, получающим питание от преобразователя частоты
через силовой кабель длиной 100 метров при различных значения коэффициентов
λ
i
.
0
150
300
450
600
0 0.2 0.4 0.6 0.8 1
M,Нм
0
150
300
450
60
0
0 0.2 0.4 0.6 0.8 1
M,Нм
146
0
150
300
450
600
0 0.2 0.4 0.6 0.8 1
M,Нм
Результаты введение компромиссного управления состоянием электродвигателей (по оси абсцисс –
время, С)
Двигатели ЭВР280L4 работают с моментами сопротивления, изменяющимися по гармоническо-
му закону с различными амплитудами колебаний и имеющими фазовый сдвиг. При отсутствии управле-
ния характер изменения электромагнитных моментов АД представлен зависимостями на верхнем рисун-
ке. Зависимости на среднем рисунке соответствуют управляемому режиму со значениями
λ
1
=1,
λ
2
=0, а
зависимости на нижнем рисунке - значениям
λ
1
=1,
λ
2
=1. В каждом из вариантов управления наблюдает-
ся снижение амплитуд пульсаций электромагнитного момента.
Характер изменения амплитуды напряжения определен исходя из необходимости соблюдения
соотношения между величиной действующего напряжения и частотой тока статора. Это соотношение
равно 7.6 или кратно ему.
Следовательно, найденная аналитическая конструкция представляет собой требуемый конечный
результат, определяющий связь частоты тока статора, параметров и фазовых координат двигателей и це-
ли управления.