Евсюков В.Н. Нелинейные системы автоматического управления
Подождите немного. Документ загружается.

81
пользовать основное свойство реле – при малом входном сигнале практически
мгновенно выдавать мощный сигнал. А уменьшение перерегулирования и авто-
колебания надо проводить другим способом.
Вопросы для самоконтроля к подразделу 3.2.6
1 Основное преимущество вибрационной линеаризации релейной харак-
теристики.
2 Как определяется зависимость
ср
Y от величины поданного сигнала со-
гласно широтно-импульсной модуляции?
3 Как определяется зависимость
ср
Y от параметров вынужденных коле-
баний?
4 Как графически можно получить зависимость
ср
Y от величины подан-
ного сигнала
0
x
?
5 От какого параметра вынужденных колебаний зависит диапазон вы-
прямленной характеристики?
6 Чему равняется максимальное значение выпрямленной характеристи-
ки?
7 Как влияет зона нечувствительности реле на выпрямленную характе-
ристику?
8 Как влияет петля гистерезиса на выпрямленную характеристику?
9 Какими дополнительными средствами можно создать на входе нели-
нейного элемента вынужденные колебания?
3.2.7 Анализ релейных систем методом Гольдфарба
Это графо-аналитический способ определения амплитуды и частоты ав-
токолебаний. Он основан на критерии устойчивости Найквиста. Предваритель-
но структурную схему нелинейной системы преобразуют так, чтобы все линей-
ные элементы объединяют в одну частотную передаточную функции
W
л.н
(jω), а
нелинейный элемент представляют в виде гармонической частотной переда-
точной функцией W
н.э
(А) на входе системы. Тогда общая передаточной функ-
ция системы в разомкнутом состоянии
W
раз
(j ω,A) = W
н.э
(A)· W
л.ч
(jω)
Предположим, что замкнутая нелинейная система находится на границе
устойчивости и в ней возникли незатухающие колебания (автоколебания). То-
гда согласно критерию Найквиста амплитудно-фазовая характеристика разомк-
нутой системы
W
раз
(j ω,A) должна проходить через точку с координатами
(-1, j0). Отсюда условие существования автоколебаний в замкнутой системе.
W
н.э
(A)·W
л.ч
(jω)· = -1
Непосредственно построить эту амплитудно-фазовую характеристику на
комплексной плоскости трудно. В этом уравнении две переменных величины:
82
частота
ω, которую изменяем от 0 до ∞ и амплитуда входного сигнала на нели-
нейного элемента
А, который определяется по W
л.ч
(jω). Л.С. Гольдфарб пред-
ложил это уравнение представить в виде
)А(W
1
)j(W
э.н
ч.л
−
=
ω
Автоколебания в системе возможны, если выполняются два условия гар-
монического баланса
)A(W
1
)j(W
э.н
ч.л
=
ω
φ
н.э
(А) + φ
л.ч
(ω) = -π
Первое условие. Отдельно построенная левая часть уравнения при изме-
нении частоты и отдельно построенная правая часть уравнения при изменении
амплитуды имеют общую точку пересечения (в некоторых случаях несколько
точек пересечения).
Второе условие. Точки пересечения соответствуют суммарному фазовому
сдвигу на угол
-π (радиан) или минус 180
0
.
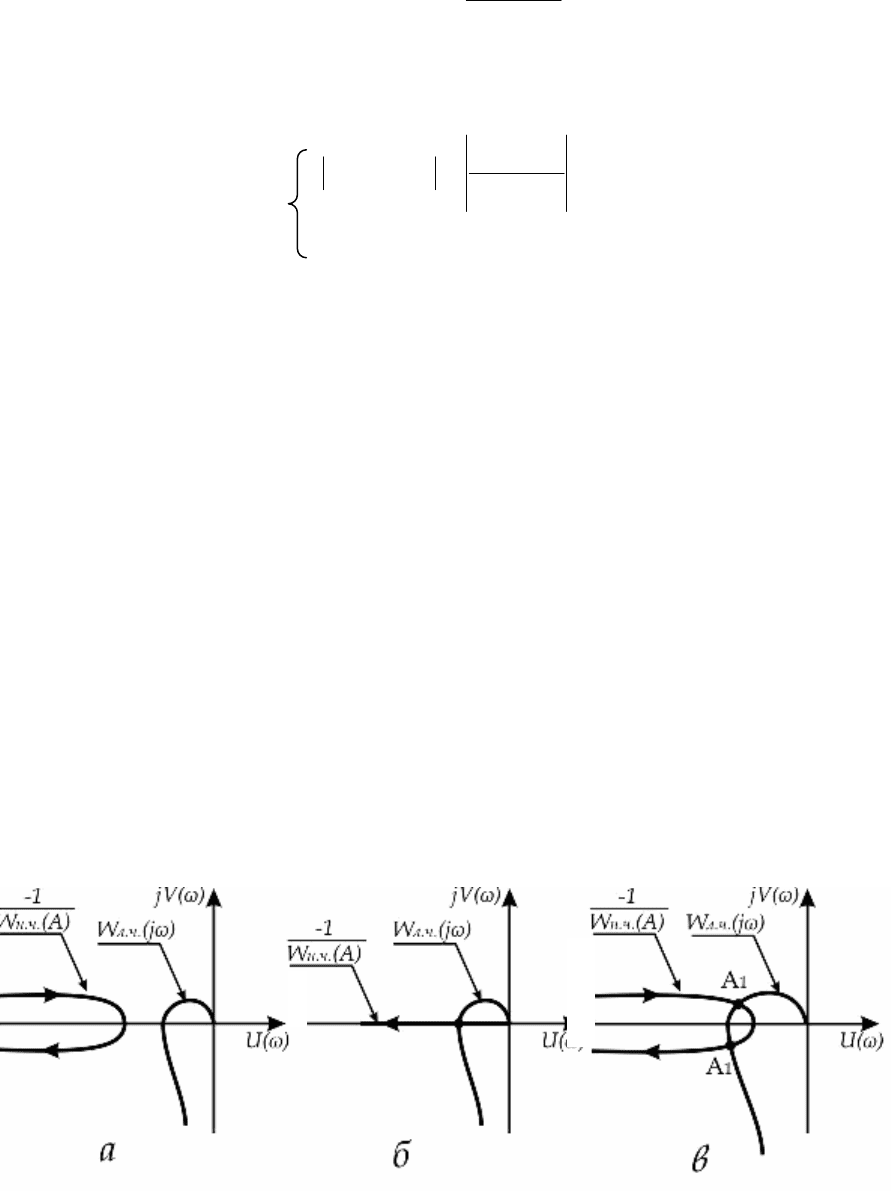
Таким образом,
колебательный процесс в системе возможен, если есть
точки пересечения амплитудных характеристик и выполняется требование к
фазовым характеристикам (рисунок 3.19).
Полученные уравнения проще всего решать графо-аналитически. Оче-
видно, что если эти два годографы на комплексной плоскости не пересекаются,
то они не имеют общего решения и в исследуемой системе нет колебательного
процесса (рисунок
3.19 а). Если эти годографы пересекаются, то есть общее
решение в исследуемой системе и есть колебательный процесс (рисунок 3.19
б). Если эти годографы пересекаются в двух точках, то в исследуемой системе
есть два вида колебательных процесса. Из них один вид или с амплитудой
А
1
–
неустойчивый колебательный процесс, а второй вид или с амплитудой
А
2
– ус-
тойчивый колебательный процесс (рисунок 3.19
в).
Рисунок 3.19 – Взаимное расположение АФЧ линейной части системы
W
л.ч.
(jω) и гармонически линеаризованной характеристики реле - 1/W
н.ч.
(A)
83
Об устойчивости или неустойчивости колебательного процесса судят
следующим образом. Пусть годографы пересекаются в точке
А
1
при частоте ω
0
и амплитуде
А
0
(рисунок 3.19 в). Зададим некоторые приращение ∆А . Для ус-
тойчивости автоколебаний требуется , чтобы при
А
1
+∆А колебания станови-
лись затухающие и амплитуда возвращалась к
А
1.
При А
1
– ∆А колебания стано-
вились возрастающие и амплитуда тоже возвращается к
А
1 .
Если при
А
1
+∆А амплитуда начала возрастать, а при А
1
– ∆А она стала
убывать, то возникший предельный цикл неустойчивый.
Анализ устойчивости нелинейной системы по методу Л.С. Гольдфарба и
определение возникновения колебательного режима работы покажем на кон-
кретных примерах.
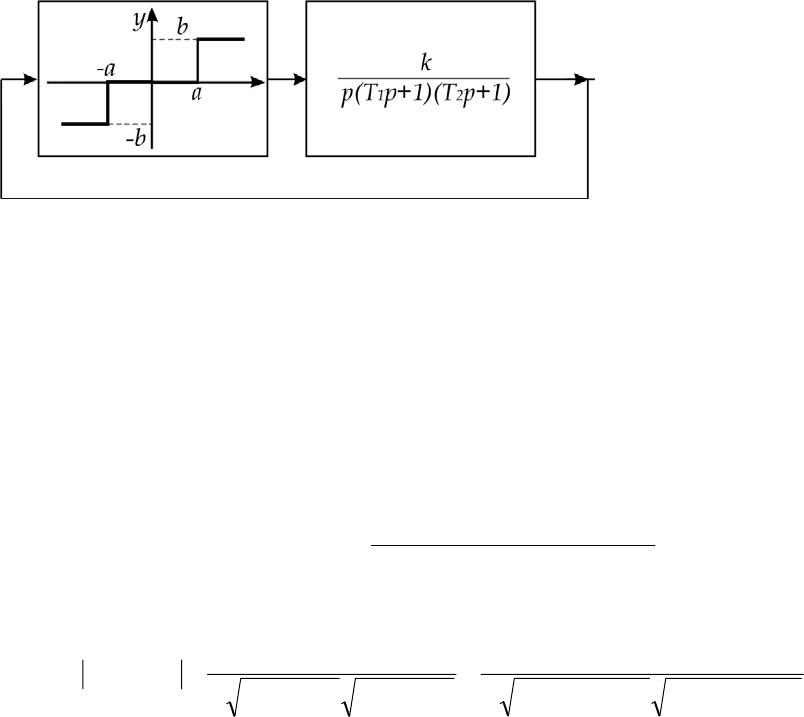
Пример 3.7 – Исследовать систему на возможность возникновения авто-
колебаний, структурная схема которой показана на рисунке 3.20.
Рисунок 3.20 – Структурная схема релейной системы к примеру 3.7
Параметры линейной части системы
k = 2, T
1
= 0,05с
-1
, T
2
= 0,02 с
-1
. Па-
раметры реле
a = 0,25, b = 110. Если автоколебательный режим работы систе-
мы возможен, то определить параметры этого режима
РЕШЕНИЕ
1 Определим параметры амплитудно-фазовой характеристики линейной
части системы по её ЧПФ
)jT1)(jT1(j
k
)j(W
21
ч.л
ωωω
ω
++
=
Модуль этой характеристики
2222
2
22
1
ч.л
0004,010025,01
2
T1T1
k
)j(W)(A
ωωωωωω
ωω
++
=
++
==
Фаза этой характеристики
φ(ω) = - 90
0
– arctg T
1
ω - arctg T
2
ω= 90
0
– arctg 0,05ω – arctg 0,02 ω
Задаваясь значением ω от 0 до ∞ определяем параметры этой характери-
стики. Результаты вычисления показаны в таблице 3.5.
84
Таблица 3.5 – Расчёт АФЧХ к примеру 3.7
ω 15 20 30 32 40 60
А(ω) 0,102 0,066 0,032 0,0273 0,017 0,006
φ
º
(ω) -142 º
-156 º -177 º -180 º -192º -211º
2 Гармонически линеаризованная передаточная функция реле с зоной не-
чувствительности
2
э.н
A
1
A
b4
)A(W
⎟
⎠
⎞
⎜
⎝
⎛
−=
α
π
Обозначим
)A(Z
)A(W
1
э.н
=
−
. После подстановки численных значений
реле
α = 0,25, b = 110
0625,0A440
A
)A(Z
2
2
−
=
π
Задаемся значениями
А от А > α = 0,25 до А→ ∞ и определяем параметры
этой характеристики. Результаты вычисления показаны в таблице 3.6
Таблица 3.6 – Расчёт Z
(A) к примеру 3.7
А 0,2501 0,2503 0,2505 0,35 3,85 10
Z(A) -0,63 -0,11 -0,028 -0,0035 -0,028 -0,071
Примечание – Однозначная характеристика реле с зоной нечувствитель-
ности не имеет фазового сдвига. Поэтому второе условие гармонического ба-
ланса выполняется за счёт амплитудно-фазовой характеристики линейной части
системы или
φ
л.ч.
(ω) = - π.
3 По результатам расчёта построим амплитудно-фазовую характеристику
линейной части системы и
Z(A) реле на комплексной плоскости (рисунок 3.21).
Годограф
Z(A) проходит по отрицательной вещественной полуоси ком-
плексной плоскости. Для удобства анализа их взаимного расположения годо-
граф
Z(A) показан выше отрицательной полуоси при его возрастании и ниже
отрицательной полуоси при его убывании.
4 Годографы
W
л.ч
(jω) и Z(A) пересекаются в двух точках. Значит автоко-
лебательный режим работы системы возможен. Система имеет два периодиче-
ских решения:
x
1
(t) = A
1
sin ω
1
t, x
2
(t) = A
2
sin ω
1
t,
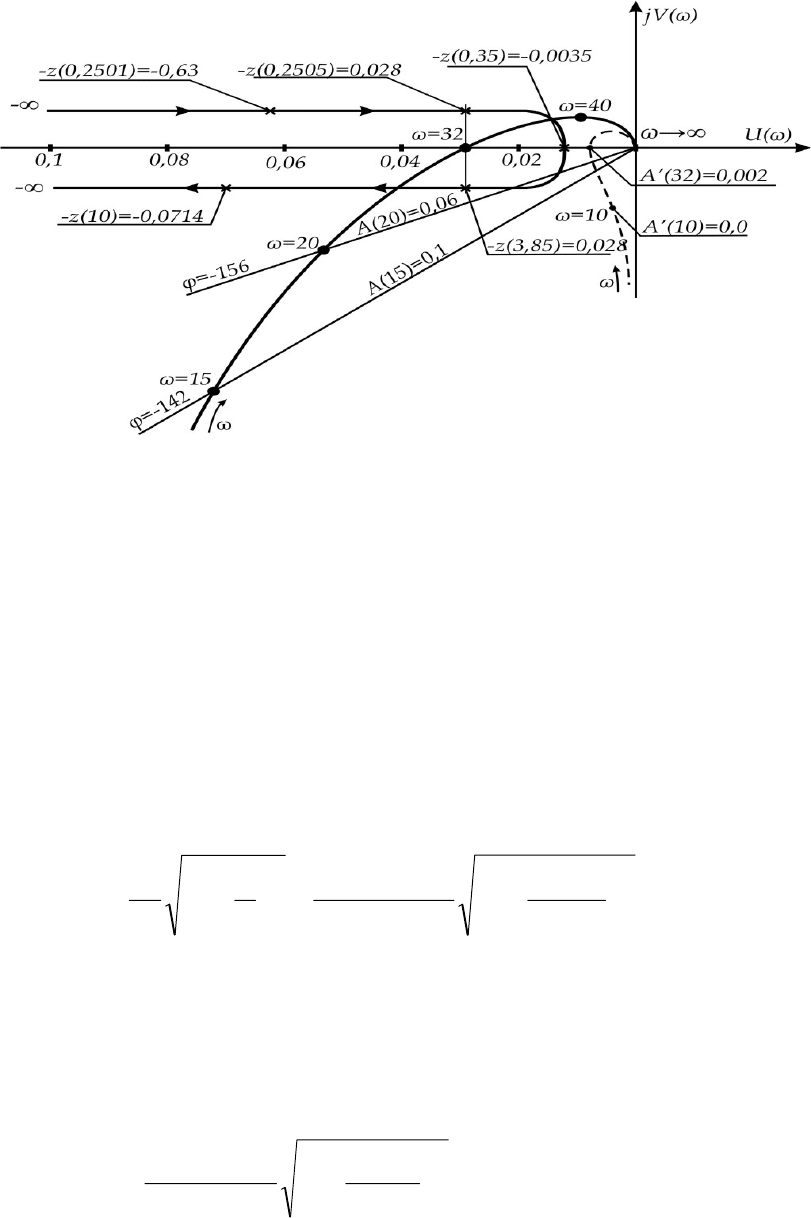
85
Рисунок 3.21 – АФЧХ линейной части системы и Z(A) к примеру 3.7
Согласно рисунка 3.21 при ω
1
= 32 с
-1
, А
1
=0,2505 или А
2
= 3,85
Тогда x
1
(t) =0,2505 sin 32t, x
2
(t) = 3,85 sin 32 t
5 Определим устойчивость полученного периодического решения.
t32sin2505,0)t(x
1
=
Зададим
некоторое приращение ± ∆А = 0,0003 к значению А
1
= 0,2505 и
определим устойчивость системы по критерию Найквиста.
При
А
1
+ ∆А = 0,2505 + 0,0003= 0,2508
567,440798,043,558
2508,0
25,0
1
2508,014,3
1104
A
1
A
b4
)2508,0A(W
2
2
=⋅=
⎟
⎠
⎞
⎜
⎝
⎛
−
⋅
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
−==
α
π
W
л.ч
(32)· W
н.э
(0,2508) = - 0,028·44,567 = - 1,2478
При А
1
+ ∆А = 0,2505 разомкнутая система охватывает точку (-1; j
0
)). Ампли-
туда периодических колебаний будет продолжать возрастать.
При
А
1
- ∆А = 0,2505- 0,0003 = 0,2502
377,2203997,077,559
2502,0
25,0
1
2502,014,3
1104
)2502,0A(W
2
э.н
=⋅=
⎟
⎠
⎞
⎜
⎝
⎛
−
⋅
⋅
==
W
л.ч
(j32)· W
н.э
(0,2502) = - 0,028·22,377 = -0,6265
При А
1
- ∆А = 0,2502 разомкнутая система становится устойчивой (не охваты-
вает точку (-1; j
0
)). Амплитуда периодических колебаний будет продолжать
уменьшаться.
ВЫВОД При любом отклонении от
А
1
= 0,2505 процесс будет расходя-
щийся. Периодическое решение
x (t) = 0,2505 sin32 t - неустойчивое.
86
6 Определим устойчивость полученного периодического решения при
А
2
=3,85. Зададим некоторое приращение + ∆А = 0,1 к значению А
2
=3,85 и оп-
ределим устойчивость по критерию Найквиста.
При
А
2
+ ∆А =3,85+ 0,1= 3,95,
386,359977,0457,35
95,3
25,0
1
95,314,3
1104
)95,3(W
2
э.н
=⋅=
⎟
⎠
⎞
⎜
⎝
⎛
−
⋅
⋅
=
W
л.ч
(j32)· W
н.э
(3,95) = - 0,028·35,386 = - 0,990
При А
2
+ ∆А = 3,95 система устойчивая и амплитуда периодических ко-
лебаний будет уменьшаться и приближаться к
А
2
= 3,85
При А
2
- ∆А =3,85- 0,1= 3,75,
264,379977,0348,37
75,3
25,0
1
75,314,3
1104
)75,3(W
2
э.н
=⋅=
⎟
⎠
⎞
⎜
⎝
⎛
−
⋅
⋅
=
W
л.ч
(j32)· W
н.э
(3,75) = -0,028·37,264 = -1,043
При А
2
- ∆А = 3,75 система неустойчивая и амплитуда периодических
колебаний будет возрастать и приближаться обратно к
А
2
=3,85.
ОБЩИЙ ВЫВОД Данная система имеет два периодических решений
- при А
1
=0,2505; x
1
(t) =0,2505 sin 32t - неустойчивый колебательный режим
-
при А
2
= 3,85 ; x
2
(t) = 3,85 sin 32 t - устойчивый автоколебательный режим
Пример 3.8 – Исследовать систему на возможность возникновения авто-
колебаний по условиям примера 3.7 при
k = 0,14 (коэффициент усиления
W
л.ч
(р) ).
РЕШЕНИЕ
1 Фазовая характеристика линейной части системы не зависит от коэф-
фициента
k. Поэтому в данном примере φ(32) = - 180
0
. Определим амплитуд-
ную характеристику при
ω = 32 и k = 0,14.
(
)
(
)
00195,0
1187,11886,132
14,0
000432,01320025,0132
14,0
)32(А
22
≈
⋅⋅
=
+⋅⋅+
=
′
2 Параметры реле не зависят от k . Поэтому характеристика Z(A) примера
3.7 соответствует условию примера 3.8.
Значение
Z(A) достигает минимум по абсолютному значению
при
А = α√2 = 0,25·1,41 = 0,3525.
Тогда
00503,0
1102
3525,014,3
b2
А
)A(Z
min
=
⋅
⋅
=
⋅
⋅
=
π
3 По фазовой характеристике условие возникновения автоколебаний вы-
полняется
φ(32) = - 180
0
. По соотношению амплитудной характеристики ли-
87
нейной части системы при
ω = 32 и значение | Z(A)|
min
условие возникновения
автоколебания не выполняется
|
Z(A) |
min
>|A´(32)|, 0,00503 > 0,00195
Значит, эти две характеристики не пересекаются. Взаимное расположение
этих двух годографов на комплексной плоскости показано на рисунке 3.22. Ха-
рактеристика
W(jω) при k = 0,14 показана пунктирной линией.
ОТВЕТ Автоколебаний в данной системе не возникнет. Система перехо-
дит в устойчивое равновесие в пределах зоны нечувствительности реле.
Пример 3.9 – Исследовать систему на возможность возникновения авто-
колебаний по условию примера 3.7 при идеальном реле с
b = 110.
РЕШЕНИЕ
1 Параметры АФХ линейной части системы остаются такие же, как в
примере 3.7 (смотри таблицу 3.5)
2 Параметры
Z(A) для идеального реле определяются по формуле
1104
А14,3
b2
А
)A(Z
min
⋅
⋅
−
=
⋅
⋅
−
=
π
Результаты вычисления показаны в таблице 3.7
Таблица 3.7 – Расчёт Z
(A) к примеру 3.9
А
0 0,2736 1 2 3 3,92 6 10 15
Z(A)
0 0,000195 0,00714 0,01428 0,02142 0,028 0,00357 0,0714 0,107
3 По результатам расчёта (таблицы 3.5 и 3.7) построим амплитудно-
фазовую характеристику линейной части системы и
Z(A) идеального реле на
комплексной плоскости (рисунок 3.22).
Рисунок 3.22 – АФЧХ линейной части системы
и Z(A) к примеру 3.9
88
4 Годографы
W
л.ч
(jω) и Z(A) пересекаются в одной точке. Значит автоко-
лебательный режим возможен при
ω
0
= 32 с
-1
и А
0
= 3,92
5 Определим устойчивость полученных периодических колебаний
При
А
0
+ ∆А =3,92+ 0,1= 4,02, 75,34
02,414,3
1104
A
b4
)A(Z =
⋅
⋅
==
π
W
л.ч
(j32)· W
н.э
(3,75) = 0,028·34,75 = 0,973
Амплитуда периодических колебаний будет уменьшаться и возвращаться
к
А
0
= 3,92.
При А
0
- ∆А =3,92 - 0,1= 3,82,
66,36
82,314,3
1104
)A(Z =
⋅
⋅
=
W
л.ч
(j32)· W
н.э
(3,82) = 0,028·36,66 = 1,026
Амплитуда периодических колебаний будет возрастать и возвращаться к
А
0
= 3,92.
ОТВЕТ В системе может возникнуть автоколебательный режим с
ω
0
= 32 с
-1
, А
0
= 3,92.
Примечание – По условию примера 3.8 и при идеальном реле автоколеба-
тельный режим, возможен при
ω
1
= 32 с
-1
, А
1
= 0,02736 при коэффициенте уси-
ления
W
л.ч
(jω) = 0,14. Таким образом, при идеальном реле всегда будет устой-
чивый автоколебательный режим если фазовая характеристика линейной части
системы имеет
φ(ωi) < - 180
0
.
Пример 3.10 – Исследовать систему на возможность возникновения авто-
колебаний по условию примера 3.7 при гистерезисном реле (без зоны нечувст-
вительности) с
α = 0,25 , b = 110.
РЕШЕНИЕ
1 Параметры АФХ линейной части системы остаются такие же, как в
примере 3.7 (смотри таблицу 3.5).
2 Параметры для
Z(A) гистерезисного реле определяем по формуле
b4
j
b4
A
)A(qj)A(q
1
)A(Z
22
πααπ
−
−−
=
′
+
=
Поскольку мнимая часть не зависит от амплитуды входного сигнала А, то
её можно вычислить заранее
00178,0j
1104
25,014,3
j
b4
j −=
⋅
⋅
−=−
πα
Вещественная часть зависит от амплитуды входного сигнала А и опреде-
ляется по формуле
89
0625,0A00714,025,0A
1104
14,3
b4
А
222
22
−−=−
⋅
−
=
−−
απ
Изменение вещественной части
Z(A) показано в таблице 3.10
Таблица 3.8 – Расчёт
Z(A) к примеру 3.10
А 2 4 6 7,25 8 10
Z(A)
-0,0141 -0,028 -0,022 -0,0518 -0,0573 - 0,0714
3 По результатам расчёта видно, что обе части Z(A) имеют отрицатель-
ное значение, поэтому график этой характеристики есть прямая в третьем квад-
ранте параллельно оси абсцисс (рисунок 3.23).
Рисунок 3.23 – АФЧХ линейной части системы и
Z(A) к примеру 3.10
Годографы
W
л.ч
(jω) и Z(A) пересекаются в одной точке. Значит автоколеба-
тельный режим возможен при
ω
0
= 23 с
-1
, А
0
= 7,25. При пересечении двух го-
дографов в одной точке проверку на устойчивость автоколебаний не делают.
4 Гистерезисная релейная характеристика вносит отставание по входному
сигналу из реле. С учётом этого определим выполнение второго условия воз-
никновения автоколебаний в данной системе
φ(ω) = - 90
0
– arctg T
1
ω
0
- arctg T
2
ω
0
- arctg
22
)А/(1А
α
α
−
=
= 90
0
– arctg 0,05·23 – arctg 0,02· 23 – arctg
2
)25,7/25,0(125,7
25,0
−
=
=
-90
0
- 48,9
0
- 24,7
0
- 16,1
0
≈ - 180
0
Условие по суммарному фазовому углу выполняется.
Примечание – По методу Л.С. Гольдфарба можно определять возмож-
ность возникновения колебательного режима для любого вида нелиней-
ной характеристики. В примерах 3.7 – 3.10 в качестве нелинейного звена
взято реле.
90
4 Устойчивость нелинейных систем
4.1 Введение
Одной из основных задач теории автоматического регулирования явля-
ется изучение динамических процессов, происходящих в САУ при нарушении
её равновесия каким-либо воздействием. Это может быть управляющее воздей-
ствие, изменение нагрузки или различные виды помех. САУ должна поддержи-
вать заданный режим работы, быть малочувствительной к посторонним воз-
мущениям. Иными словами
, САУ должна быть работоспособной, несмотря на
действие на неё различных возмущений или быть устойчиво [1,3,12].
Под устойчивостью понимается свойство системы возвра-
щаться к состоянию установившегося равновесия после уст-
ранения всех возмущений.
Устойчивость нелинейных систем зависит от величины возмущающего
воздействия. Например, при малом (бесконечно малом) значении возмущаю-
щего воздействия система может
быть устойчива, или устойчива «в малом».
При большом (конечным по величине) значении возмущающего воздействия
система может быть неустойчива, или неустойчива «в большом». Но может
быть и наоборот: неустойчива «в малом» и устойчива «в большом».
Если динамика линейной системы описывается дифференциальным
уравнением с постоянными коэффициентами, то её устойчивость «в малом»
обеспечивает
неограниченную устойчивость «в большом» благодаря принципу
суперпозиции. При этом считается, что она устойчива «в общем». Её устойчи-
вость можно определить по первой теореме (по первому методу) А.М. Ляпуно-
ва.
Линейная система устойчива, если все вещественные корни
характеристического уравнения отрицательные.
Определение устойчивости нелинейной системы связано с преодолением
значительной трудности. Это связано
со следующим:
- устойчивость «в малом» и устойчивость «в большом» требует отдель-
ного определения;
- установившейся режим работы системы может быть в виде устойчивого
равновесия, а так же в виде автоколебаний;
- в зависимости от вида нелинейности система может быть устойчива при
одних начальных условиях и неустойчива при других или при других
воздей-
ствиях.
В отдельных случаях, если можно линеаризировать нелинейное диффе-
ренциальное уравнение, то устойчивость такой системы можно определить по
критериям устойчивости линейной системы (критерий Рауса, Гурвица, Михай-