Fowler A. Mathematical Geoscience
Подождите немного. Документ загружается.

360 6 Landscape Evolution
It is a peculiarity of the Meyer-Peter/Müller law that A =0 to leading order, so that
the steady state is approximately neutrally linearly stable. Simplification of (6.136)
2
now yields
−δ
1/2
∂Z
∂T
+
∂H
∂T
=S
S
1/2
H
3/2
+S
1/2
∂
∂Y
βH
1/2
∂H
∂Y
+A
∂
2
Z
∂Y
2
, (6.141)
with inessential error terms of O(δ
1/3
).
(6.141) reveals the essence of linear instability and its nonlinear development.
Linear instability is associated with the negative diffusion coefficient of Z if A>0,
i.e.,
S<S
c
=
μ
c
l
d
, (6.142)
using (6.20)
7
and (6.32). In dimensional terms, this suggests instability if the slope
is less than μ
c
, which occurs precisely at the shoreline. If the resulting rills are
able to grow to significant depth, then the nonlinear evolution of H is described
approximately by
∂H
∂T
=S
S
1/2
H
3/2
+S
1/2
∂
∂Y
βH
1/2
∂H
∂Y
, (6.143)
and Z then follows from (6.136) by quadrature.
(6.143) is a degenerate nonlinear diffusion equation, about which a good deal is
known. The source term is suggestive (if S
> 0, i.e., on the (upper) convex portion
of the hillslope) of blow-up, and the possibility that H could reach ∞at a finite time.
The degenerate diffusion coefficient is suggestive of solutions of compact support.
6
If such solutions develop, then the integral constraint (6.134) can be written in the
form
∞
−∞
H
3/2
dY =
2Lrx
S
1/2
. (6.144)
Note that this constraint is independent of Eq. (6.143), which is derived from sed-
iment conservation, whereas (6.144) is a condition of water mass flow. More pre-
cisely, the right hand side is an upper bound for the left hand side, since there may
be a non-zero flux arising from the outer solution.
Suitable boundary conditions for (6.143) follow from matching to an outer film
flow, where Y ∼ 1/δ
1/2
and H ∼δ
1/3
. Consequently, we require
H →0asY →±∞. (6.145)
A suitable initial condition is less easy to provide, other than stating that H is
initially small (since we suppose it arises from an instability of the steady state
H ∼δ
1/3
). The reason for this is that we have omitted an intermediate discussion
of the nonlinear stability of the steady state. The long time evolution of an arbi-
trary (small) perturbation to the steady state can be described by consideration of a
6
Meaning that they are non-zero only on finite interval(s).
6.6 Channel Formation 361
Fourier integral over normal modes of wave number k. The upshot of this is that the
emerging linear solution is a monochromatic oscillation whose wave number is that
with maximum growth rate, and this would serve as a suitable initial condition for
the resulting nonlinear equations in (6.131). However, to obtain an appropriate ini-
tial condition for (6.143), we really need to know how solutions to (6.131) behave.
In seeking solutions at larger amplitude, we are motivated by the fact that developed
river channels do attain depths on the order of a metre, and thus we implicitly assume
that the nonlinear equations (6.131) do not have bounded stable solutions for H .
6.6.1 Channel Solutions
Suppose the channel depth satisfies (6.143), with coefficients of O(1).
7
Suppose first that S
< 0 (a concave slope, linearly unstable if it is a steady state).
The nonlinear algebraic term in (6.143) is thus negative, and we can expect solutions
to decay towards zero.
8
This suggests that large channels are not viable, although
paradoxically the uniform film state is unstable. The implication is that in this case,
finite amplitude rill solutions of (6.131) exist and are stable.
If S
> 0, then channels can grow. If we define
Y =
2β
3S
1/2
ξ, T =
τ
S
S
1/2
, (6.146)
then H satisfies
H
τ
=H
3/2
+
H
3/2
ξξ
, (6.147)
with the constraint
∞
−∞
H
3/2
dξ =
¯
Q =
6S
βS
1/2
Lrx. (6.148)
With this constraint, there is a unique steady state corresponding to a single isolated
channel,
H
3/2
=
¯
Q
2
cosξ. (6.149)
6.6.2 Bank Migration, Stability and Blow-up
The hallmark of nonlinear diffusion equations such as (6.147) is that we expect to
have solutions with compact support, and we expect the margins (where H =0) to
7
For constant uplift U and rainfall r and the Meyer-Peter/Müller transport law (6.139), this is not
true for the steady state slope, since then S =
U
r
+O(δ
1/3
). Nevertheless it is reasonable to suppose
S
=O(1), either because the base state is not in equilibrium, or because uplift and/or rainfall are
not uniform.
8
This is easy to show, by consideration of the time derivative of
∞
−∞
H
2
dY.
362 6 Landscape Evolution
move at finite rates. If H ≈a(ξ
m
−ξ)
ν
near a margin ξ = ξ
m
, then a local balance
in (6.147) shows that either ν = 2(H is smooth) and
˙
ξ
m
≈ 3a
1/2
(the margin ad-
vances) or ν = 2/3 and the margin is stationary (see also Question 6.12). Actually
this latter result is inconclusive, since if H ≈ a(ξ
m
−ξ)
2/3
+ b(ξ
m
− ξ)
4/3
+···,
then
˙
ξ
m
≈
15b
2a
1/2
, and can be zero, positive or negative. This appears to be the more
general result, and it also shows that great care needs to be taken in solving (6.147)
numerically.
Let us define
u =H
3/2
, (6.150)
so that
2
3u
1/3
u
τ
=u +u
ξξ
, (6.151)
with steady state solution
u =
¯
Q
2
cosξ. (6.152)
We write
u =
¯
Q
2
cosξ +V, (6.153)
and linearise the equation on the basis that V is small, so that
2
3cos
1/3
ξ
V
τ
=V +V
ξξ
. (6.154)
If V is zero and analytic at the margins, then the margins are stationary at ±π/2, in
view of the above discussion on margin migration. Multiplying by V and integrat-
ing,
1
3
d
dτ
π/2
−π/2
V
2
cos
1/3
ξ
dξ =
π/2
−π/2
V
2
−V
2
ξ
dξ (6.155)
(since V =0at±π/2). Now the variational principle for the right hand side integral
as a functional of V tells us that it is maximised when V ∝cosξ , in which case the
right hand side is zero. V =cosξ is not an admissible solution to (6.155), since the
integral constraint (6.148) also implies that
π/2
−π/2
Vdξ=0, (6.156)
and therefore it follows that
d
dτ
π/2
−π/2
V
2
cos
1/3
ξ
dξ < 0. (6.157)
Equally one can show that all normal modes for V decay. This indicates that the
steady state is linearly stable. Numerical computations confirm that the steady state
is indeed globally stable. Further discussion of the solutions of (6.147), and in par-
ticular of the issue of blow-up, is given in the notes (see also Question 6.13).
6.7 Channels and Hillslope Evolution 363
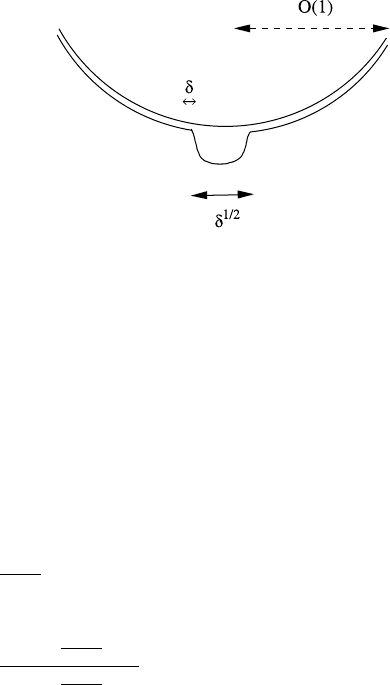
Fig. 6.5 Expected solution
structure for (6.158)
6.7 Channels and Hillslope Evolution
As the channels described by (6.143) evolve, a transverse flow will develop on the
hillslope, causing erosion and thus subsidence. The effect of this on the hillslope is
that the assumption of a basic one-dimensional downhill slope becomes unrealistic,
and a channel will be flanked on either side by different hillslopes. We now show
how this situation can be described.
We revert to the model (6.105), using the Meyer-Peter/Müller transport law:
∇.[qn]=r,
q =h
3/2
|∇η|
1/2
,
η
t
−δh
t
=U −∇.[f N],
n =−
∇η
|∇η |
,
τ
e
=−(h +β)∇η +δβ∇h,
N =−
∇η −
δβ
(h+β)
∇h
∇η −
δβ
(h+β)
∇h
,
f =[τ
e
−τ
∗
c
]
3/2
+
.
(6.158)
Our key to the solution behaviour stems from how we expect channels and hillslope
to behave; this is shown in Fig. 6.5. We have already described channels, of width
O(δ
1/2
). On the hillslope, we now seek solutions in which η ∼O(1),butη depends
on both x and y (i.e., the gradient is not simply in the x direction).
On the hillslope, appropriate scales are η ∼1, h ∼ 1, q ∼1, and the approximate
model for η ≈ s and h is just (6.27), as before. In the channel, which we take to
be at y =0, we have h =H/δ
1/3
, q =Q/δ
1/3
, y = δ
1/2
Y , η =η
0
(x) +δZ (where
η
0
(x) = η(x,0)), t = δT , and the channel depth satisfies (6.143), and we suppose
H →0atY =±Y
0
.
It is clear that if the outer hillslope depends on y (and thus feeds water to the
channel), then ∇η must have a sharp jump between hillslope and channel, and in
order for this to occur, there must be a singular transition region near the channel
margin (i.e., the river bank). In this bank layer, we put
y =δ
1/2
Y
0
+δζ, η =η
0
(x) +δZ, h ∼1,q∼1. (6.159)
364 6 Landscape Evolution
Again, we may linearise the geometry, and we obtain
n =−
1
S
(η
0
,Z
ζ
), N ≈
1
E
−η
0
,
β
(h +β)
h
ζ
−Z
ζ
, (6.160)
where
9
S =
η
2
0
+Z
2
ζ
1/2
,E=
η
2
0
+
β
(h +β)
h
ζ
−Z
ζ
2
1/2
. (6.161)
The effective shear stress is then
τ
e
≈(h +β)E. (6.162)
At leading order, the water and sediment conservation equations are simply
∂
∂ζ
qZ
ζ
S
≈0,
∂
∂ζ
F
E
β
(h +β)
h
ζ
−Z
ζ
≈0,
(6.163)
which state that the water and sediment fluxes are continuous across the bank. Thus
h
3/2
Z
ζ
S
1/2
=K,
F
E
β
(h +β)
h
ζ
−Z
ζ
=−C, (6.164)
where K and C are constants (the water and sediment fluxes to the channel). The
existence of a satisfactory bank transition layer relies on the solutions of (6.164)
being able to match both to the hillslope film flow and the deep channel flow.
If the outer hillslope limits of film thickness and normal slope are h
0
= h(x, 0)
and μ =
∂η(x,0)
∂y
> 0 (for y>0), then we require
Z
ζ
→μ, h →h
0
as ζ →∞. (6.165)
The steady channel solution (6.149) is still applicable, and from this we find that the
appropriate matching conditions to the channel are
h
3/2
∼−Aζ, Z
ζ
→0asζ →−∞. (6.166)
(Since h →∞as ζ →−∞,(6.163) implies Z
ζ
→ 0.) If
¯
Q is the volume flux in
the channel, then
A =
3S
0
¯
Q
4βS
1/2
0
, (6.167)
where S
0
=|η
0
|.
Let S
+
be the slope at the channel of the hillslope, i.e.,
S
+
=
S
2
0
+μ
2
1/2
; (6.168)
9
E here is unrelated to the dimensionless erosion rate used a long time ago in (6.16).
6.7 Channels and Hillslope Evolution 365
then as ζ →∞, E → S
+
, τ
e
→(h
0
+β)S
+
, and comparison of equations (6.164)
with the matching condition (6.165) then shows that
K =
h
3/2
0
μ
S
1/2
+
,C=
f {(h
0
+β)S
+
}μ
S
+
. (6.169)
Equally, as ζ →−∞, S → S
0
, E → S
0
, thus τ
e
∼ S
0
h, f ∼ S
3/2
0
h
3/2
, h
3/2
∼
−Aζ , h
ζ
/h∼2/3ζ and Z
ζ
∼KS
1/2
0
/h
3/2
; it follows from (6.166) that
KS
0
+
2βS
1/2
0
A
3
=C. (6.170)
It now remains to see whether a connecting solution of (6.164) exists. Using the
definition of S in (6.161), we can solve (6.164)
1
to find
Z
ζ
=U(h) ≡
K
√
2h
3
K
2
+
K
4
+4S
2
0
h
6
1/2
1/2
. (6.171)
U(h) is a monotonically decreasing function of h, with
U ∼
K
2
h
3
as h →0,
U ∼
KS
1/2
0
h
3/2
as h →∞.
(6.172)
Next we define
L = Z
ζ
−
β
(h +β)
h
ζ
. (6.173)
We have the Meyer-Peter/Müller law f =[(h + β)E −τ
∗
c
]
3/2
, where E =[S
2
0
+
L
2
]
1/2
, and (6.164)
2
is simply fL= EC. This implies L>0, and simplification
then shows that
h +β =
τ
∗
c
+C
2/3
1 +
S
2
0
L
2
1/3
(S
2
0
+L
2
)
1/2
. (6.174)
This defines h in terms of L as a monotonically decreasing function, with h →−β
as L →∞, and h ∼(
C
2
S
0
L
2
)
1/3
as L →0. Thus L(h) is a monotonically decreasing
positive function, with L(0) being finite and
L ∼
C
S
1/2
0
h
3/2
as h →∞. (6.175)
It now follows from (6.173) that h is given by the solution of the ordinary differ-
ential equation
β
(h +β)
h
ζ
=U(h)−L(h). (6.176)
The function U −L is positive and decreasing for small h, and as h →∞,(6.170),
(6.172) and (6.175) imply that U −L ∼−
2βA
3h
3/2
. Since this is negative, it implies

366 6 Landscape Evolution
Fig. 6.6 A channel in an
evolving landscape
that there is a zero
10
h
0
of U −L and that U −L<0forh>h
0
. Consequently, the
solution of (6.176) takes h from ∞ (and specifically h
3/2
∼−Aζ )asζ →−∞to
h
0
as ζ →∞, as required. Thus the bank singular layer engineers the transition we
seek in adjusting the hillslope to the channel.
6.7.1 Hillslope Evolution
The analysis of the preceding section provides a series of recipes which relate the
hillslope to the channel. Now we show how this combination provides a way to
compute the long term evolution of the hillslope without having to resolve (compu-
tationally) the details of the bank and channel.
The situation we have in mind is shown in Fig. 6.6. Suppose that we know the
channel location, i.e., η
0
(x); then we also know S
0
. We can therefore solve (6.27)
for s ≈η and h, given zero flux conditions on the adjoining ridges, and in this way
μ and h
0
are determined.
Equations (6.167) and (6.169) provide three prescriptions for A, K and C, and
then (6.170) determines an ordinary differential equation for S
0
.Ifwetakef =
[τ
e
−τ
∗
c
]
3/2
, τ
e
≈(h +β)S
+
, where (6.168)givesS
+
in terms of S
0
, then we have
¯
QS
0
=
2μ
S
+
(h
0
+β)
3/2
S
3/2
+
−τ
∗
c
−h
3/2
0
S
1/2
+
S
0
. (6.177)
In addition the water flux to the channel is just 2K (if we suppose that a symmet-
ric slope lies in y<0). Therefore the water flux
¯
Q in the channel satisfies
¯
Q
=
2μh
3/2
0
S
1/2
+
. (6.178)
(The prime denotes differentiation with respect to x.) A similar equation for the
sediment flux in the channel is satisfied,
d
dx
Y
0
−Y
0
FdY=2C. Since F (rescaled) in
the channel is approximately QS
0
, it follows from this that (S
0
¯
Q)
=2C, but in fact
this is already implied by (6.177) and (6.178).
10
Probably only one, but if there were more, then h
0
is taken as the largest zero.

6.7 Channels and Hillslope Evolution 367
Equations (6.177) and (6.178) provide two ordinary differential equations for
channel water flux
¯
Q and channel slope S
0
. Since S
0
=−η
0
, we therefore have
a second order differential equation for channel elevation η
0
, with boundary con-
ditions specifying its source (contiguous with the hillslope) and terminus. In gen-
eral, these equations must be solved numerically (see also Question 6.14). Note that
S
0
> 0, consistent with the basic assumption in the channel description.
6.7.2 Detachment Limited Erosion
One of the worrying features of Smith–Bretherton model and our discussion of it is
that channels form when S
> 0, i.e., the hillslope is convex, and indeed the resulting
channel long profile is also convex. This is inconsistent with what we expect from
the linear stability results, and also in practice. Consulting (6.136), we can see that
the source term in the nonlinear diffusion equation for channel depth h,(6.143),
arises from the term
∂F
∂x
, and specifically from its S component, i.e.,
∂F
∂S
S
. Since
∂F
∂S
> 0, positivity of the source requires S
> 0.
This is odd, because we would expect sediment flux to increase with distance
downstream irrespective of whether the slope is convex or concave. In fact, there is
something not quite right with the use of the sediment transport law in the form f ≈
qS, because it implies that there is a sediment flux even if there is no sediment! The
resolution of this paradox lies in the formulation of the original sediment transport
model in the form (6.20). There we allowed for the existence of a non-zero thickness
a of the bedload layer. In order to pose a more physically realistic transport law, we
need to retain the dependence of sediment flux on a, and therefore we modify our
definition of the sediment flux from that in (6.21)tobe
Q
b
=f N, (6.179)
where
f =a ˆv. (6.180)
Because of the specific inclusion of a, we see that ˆv is the mean bedload speed, and
evidently this will be in the direction of the mean effective stress, N. We expect that
ˆv will depend on flow speed and slope, and indeed that it will be consistent with
measured transport rates.
Equally, we suppose the abrasion rate A in (6.20) must depend on a. Erosion or
mobilisation of an underlying rock or compacted sediment due to the rubbing of a
mobile overlying layer of thickness can be expected to decrease as a increases, and
to be specific, we will suppose that
A =
ˆ
A[1 −a]
+
, (6.181)

368 6 Landscape Evolution
where
ˆ
A will depend on the stress, and the (dimensionless) thickness at which bed
abrasion ceases can be taken to be a =1 by the choice of scale for a.
11
In order that
f give the Meyer-Peter/Müller result when a =1, we take
ˆv =[τ
e
−τ
∗
c
]
3/2
+
, (6.182)
and to be specific, we will suppose that
ˆ
A =α ˆv, (6.183)
since the driving process for bedload transport and abrasion is the same. The dimen-
sionless parameter α is thus the ratio of abrasion rate to uplift rate.
Consulting (6.20), we see that in a channel, with s =η −δh −δνa, η =η
0
+δZ,
h =H/δ
1/3
, t =δ
7/6
T , f = F/δ
1/2
, τ
e
=T
e
/δ
1/3
, and if we put A =
˜
A/δ
1/2
, ˆv =
V/δ
1/2
, then
δ
1/3
[Z
T
−νa
T
]−H
T
=δ
1/2
U −
˜
A,
δ
1/3
νa
T
+∇.[F N]=
˜
A,
(6.184)
where
F =aV,
˜
A =αV (1 −a), V =
T
e
−δ
2/3
τ
∗
c
3/2
+
. (6.185)
At leading order in a channel, we thus have
H
T
=
˜
A =∇.[F N]. (6.186)
The first thing to do is to see whether this prescription for sediment transport can
be consistent with the observation that bedload transport depends only on bed stress.
Suppose that in a one-dimensional flume, the flow and depth are constant, so that
also V is constant. Then we have
Va
x
=αV (1 −a), (6.187)
whence
a =1 −exp(−αx). (6.188)
This immediately identifies two limiting régimes, transport limited and detachment
limited. The transport limited régime occurs when α 1. Then a → 1 rapidly,
and the sediment transport F ≈ V , which gives the Meyer-Peter/Müller result. If,
however, α 1, we have detachment limited transport, in which F ≈ αV x, and
transport is limited by the rate that sediment can be eroded from the underlying
regolith. Arguably, this is the more likely situation in mature mountainous terrain.
Let us now revisit the derivation of the deep channel equation, allowing for the
variable bedload density. In the channel, V ≈ QS, and thus
˜
A ≈αQS(1 −a), and
11
This choice is distinct from our earlier assumption in (6.20), which was that U ∼A. By selecting
the scale for a to be the presumed value where abrasion ceases, we cannot guarantee A ∼U ,and
therefore A is not necessarily O(1).

6.7 Channels and Hillslope Evolution 369
F ≈ aQS. Using the linearised geometric description of N in (6.110), we find that
(6.186) becomes
H
T
=α(1 −a)QS =
∂F
∂x
−
∂
∂Y
F
S
∂Z
∂Y
+
∂
∂Y
βF
SH
∂H
∂Y
, (6.189)
while the water flow equation is approximately
SQ
x
=
∂
∂Y
Q
∂Z
∂Y
, (6.190)
and Q ≈H
3/2
S
1/2
.
We can use (6.190) and the definition of Q to write (6.189) in the form
αS −a
αS +S
+
D
Q
=Sa
x
−
Z
Y
−
βH
Y
H
a
Y
, (6.191)
where D is the diffusion term we had before for H ,
D =
∂
∂Y
βH
1/2
S
1/2
∂H
∂Y
. (6.192)
Obviously it is no longer simple to solve this equation for a. If we suppose that
S and Q are known, then (6.191) is a hyperbolic equation for a. The characteristics
come into the channel from the bank and turn downstream. A reasonable estimate
for the solution follows from neglecting the term proportional to a
Y
. In this case,
the solution satisfying a =0atx =x
0
is
a =
α
S
x
x
0
S(X)exp
−
x
X
α +
D
QS
dX
dX. (6.193)
There is a fundamental distinction between the solutions depending on whether
αQS +D ≶ 0. If αQS +D > 0, then a increases towards a saturation value. Since
we expect D < 0 (because of the steady solutions of (6.147)), this (transport limited)
case occurs if α is large enough. If α 1, then direct asymptotic solution of (6.191)
shows that a = 1 +O(1/α), thus S(1 −a) ≈
1
α
(S
+
D
Q
), and therefore
∂H
∂T
≈QS
+D, (6.194)
which is the same result as (6.143), and this is therefore the transport limiting chan-
nel equation.
If, on the other hand, α 1, then we can expect αQS + D < 0, and the ac-
tive bedload continues to increase, but is small: a ∼ α. No major simplification of
(6.193) is possible, but we do have
1
α
∂H
∂T
=QS +O(α). (6.195)
Evolution of channel depth is on the longer time scale T ∼O(1/α), and the source
term is QS ≈H
3/2
S
3/2
and is independent of curvature. We might suppose that the
diffusive term is included in the O(α) term, and this is borne out by (6.193)ifwe